
I øjeblikket den største humanoide robotundersøgelse foretaget af Xpert.Digital – markedsboom forude: Fra robotprototyper til praktisk anvendelse
Xpert-forhåndsudgivelse

Available in 27 languages 📢
Foretræk Xpert.Digital på GoogleⓘUdgivet den: 13. maj 2025 / Opdateret den: 13. maj 2025 – Forfatter: Konrad Wolfenstein

I øjeblikket den største humanoide robotundersøgelse foretaget af Xpert.Digital – markedsboom forude: Fra robotprototyper til praktisk anvendelse – Billede: Xpert.Digital
Humanoid robotteknologi: Nøglen til en ny industriel revolution? (Læsetid: 52 min / Ingen annoncer / Ingen betalingsmur)
Til ledelsen: Overvindelse af uoverensstemmelser – Hvorfor integrerede strategier baner vejen for robotter
Humanoid robotteknologi er ved et vendepunkt, hvor overgangen fra forskningsprototyper til indledende kommercielle implementeringer, især i industrielle miljøer. Denne hurtige udvikling er i høj grad drevet af fremskridt inden for kunstig intelligens (AI), især kropsliggjort AI, store sprogmodeller (LLM'er) og vision-sprog-handlingsmodeller (VLA'er), samt af hardwareinnovationer. Markedsprognoser tyder på betydelig vækst med estimater fra 30 milliarder dollars til over 200 milliarder dollars i 2035. Anvendelsesområderne er forskellige og spænder fra industri og sundhedspleje til personlige hjælpesystemer. Trods det enorme potentiale er der fortsat betydelige udfordringer inden for områder som batteriteknologi, manuel fingerfærdighed, omkostningseffektivitet, skalerbarhed og etisk forvaltning. Konvergensen af faldende hardwareomkostninger, forbedret AI og stigende mangel på arbejdskraft skaber en slags "perfekt storm", der favoriserer en accelereret anvendelse af humanoide robotter. Dette kan føre til et hurtigere investeringsafkast (ROI) i målrettede industrielle applikationer end forudsagt af nogle konservative estimater, hvilket igen ville resultere i hurtigere anvendelsescyklusser i disse nicher. Virksomheder vil have stigende incitamenter til at implementere automatiseringsløsninger, og humanoide robotter tilbyder på grund af deres alsidighed en tilpasningsdygtig løsning til menneskecentrerede miljøer.
Det dobbelte fokus på udvikling af generel AI og højt specialiserede hardwarekomponenter (aktuatorer, sensorer) fører til et komplekst samspil. Fremskridt på ét område kan hæmmes af flaskehalse på det andet, hvilket tyder på, at holistiske, integrerede udviklingsstrategier vil være afgørende for markedsledere. For eksempel kan sofistikeret AI ikke fuldt ud kompensere for utilstrækkelig mekanisk fingerfærdighed eller begrænset driftstid på grund af batterimangel. Omvendt kan avanceret hardware ikke nå sit fulde potentiale uden tilstrækkelig intelligent software. Virksomheder, der kan udvikle hardware og AI sammen, som det er tilfældet med Teslas vertikale integrationstilgang, kan derfor have en konkurrencefordel.
Dette årti (2025-2035) lover at indlede en transformerende æra for menneskelignende robotter, som har potentiale til dybtgående at ændre arbejde, samfund og hverdagsliv.
Relateret til dette:

Teknologiske gennembrud: Hvordan menneskelignende robotter ændrer vores liv
Humanoid robotteknologi er blevet et af de mest dynamiske og potentielt transformative teknologifelter i det 21. århundrede. I krydsfeltet mellem kunstig intelligens, avanceret mekanik, elektronik og materialevidenskab lover humanoide robotter fundamentalt at ændre den måde, mennesker arbejder, interagerer og lever på. Denne undersøgelse giver en omfattende analyse af den nuværende tilstand, historiske udvikling, teknologiske fundamenter, forskellige anvendelser, markedslandskab, centrale udfordringer og fremtidige udviklingsmuligheder for humanoide robotter, med et særligt fokus på perioden frem til 2025 og fremover.
Definition af en humanoid robot
En humanoid robot er per definition en robot, hvis ydre form ligner menneskekroppen og typisk har en torso, et hoved, to arme og to ben. Denne menneskelignende form er ikke blot et æstetisk træk, men tjener ofte funktionelle formål, såsom interaktion med værktøjer og miljøer designet til mennesker, eller eksperimentelle formål, for eksempel forskning i tobenet bevægelse.
Akademiske definitioner går ud over blot fysisk lighed og understreger, at menneskelignende robotter er omhyggeligt konstrueret til ikke kun at efterligne menneskeligt udseende, men også menneskelig adfærd. Dette inkluderer at replikere funktioner såsom perception, beslutningstagning og interaktion. På grund af deres antropomorfe design tilbyder de iboende fordele i menneskecentrerede miljøer, hvilket muliggør mere naturlig interaktion og større tilpasningsevne end andre former for robotter. Evnen til at bevæge sig inden for menneskedesignede rum og bruge værktøjer designet til mennesker er et centralt aspekt af deres funktionalitet og voksende anvendelighed.
Selve definitionen af "menneskelignende robotter" er underlagt evolution. Oprindeligt var fokus stærkt på fysisk form. Nyere akademiske overvejelser og teknologiske fremskridt flytter dog i stigende grad dette fokus til efterligning af adfærd og kognitive funktioner. Denne udvikling er i høj grad drevet af fremskridt inden for kunstig intelligens. Selvom menneskelignende robotter ikke kun ser menneskelige ud, men også i stigende grad "handler" og "ræsonnerer" på en menneskelignende måde, sænker dette interaktionsbarrierer, men rejser samtidig mere dybere etiske spørgsmål vedrørende bedrag, følelsesmæssig binding og intelligensens natur.
Undersøgelsens betydning og omfang
Humanoid robotteknologi repræsenterer en kritisk teknologisk frontlinje og legemliggør konvergensen af forskellige videnskabelige og tekniske discipliner. Dens potentiale til at revolutionere industrier, afhjælpe mangel på arbejdskraft, hjælpe med farlige opgaver og forbedre dagligdagen er enormt. Det "funktionelle formål" med humanoid design - interaktion med menneskelige værktøjer og miljøer - er ved at blive en primær økonomisk drivkraft. Denne tilpasningsevne betyder, at virksomheder kan integrere humanoide robotter i eksisterende arbejdsgange med mindre forstyrrelser og kapitaludgifter, end det ville være nødvendigt at redesigne fabrikker eller lagre til specialiserede robotter. Denne iboende fordel er et stærkt salgsargument, som demonstreret af pilotprogrammer i bil- og logistikindustrien, og fungerer som en stærk katalysator for adoption.
Denne undersøgelse har til formål at give en omfattende analyse af den nuværende tilstand (omkring 2025), historiske kontekst, teknologiske fundamenter, anvendelser, markedslandskab, udfordringer og fremtidige udviklingsstier for humanoide robotteknologier. Den er beregnet til at tjene som en solid ressource for forskere, udviklere, politikere, investorer og den brede offentlighed til at forstå kompleksiteten og de vidtrækkende konsekvenser af denne nye teknologi.
Historisk udvikling af humanoid robotteknologi
Fascinationen af kunstige væsener, der ligner mennesker, strækker sig langt tilbage i historien og har i væsentlig grad formet udviklingen af humanoide robotter. Fra gamle myter til nutidens højt avancerede maskiner spænder den menneskelige bestræbelse på at genskabe intelligens og bevægelse i en menneskelignende form over et bredt spektrum.
Tidlige koncepter og automater
Ideen om menneskelignende kunstige væsener kan findes i gamle myter som dem om Hefaistos, der skabte mekaniske tjenere, eller Pygmalion, hvis statue kom til live. Tidlige mekaniske konstruktioner, kendt som automater, vidner om denne tidlige interesse. Eksempler inkluderer egyptiske vandure med bevægelige menneskefigurer, der slog timerne, de mekaniske fugle og heste fra den kinesiske ingeniørkong Shu Tse (ca. 400 f.Kr.) og de programmerbare musikalske automater fra Al-Jazari i det 12. århundrede. Leonardo da Vincis skitser af en mekanisk ridder fra slutningen af det 15. århundrede, der er i stand til at bevæge arme, hoved og kæbe, tilhører også denne række af tidlige koncepter. Disse tidlige eksempler demonstrerer en langvarig menneskelig fascination af skabelsen af kunstige væsener og lagde det konceptuelle grundlag for senere udviklinger.
Historiske milepæle inden for robotudvikling (før 1970 og vigtige teoretiske/tidlige praktiske skridt i det 20. århundrede)

Historiske milepæle inden for robotudvikling (før 1970 og vigtige teoretiske/tidlige praktiske skridt i det 20. århundrede) – Billede: Xpert.Digital
Den historiske udvikling af robotteknologi før 1970 er præget af adskillige milepæle og teoretiske fremskridt. Allerede i 3500 f.Kr. beskrev myterne om Hefaistos og Pygmalion i græsk mytologi tidlige koncepter om intelligente mekanismer og kunstige væsener. Omkring 1500 f.Kr. udviklede egypterne vandure med menneskelignende figurer, der repræsenterede de første skridt mod mekanisk automatisering. I 1206 e.Kr. konstruerede Ismail al-Jazari en tidlig form for programmerbar menneskelignende robot med sin Musikerbåd. I 1495 e.Kr. skitserede Leonardo da Vinci en mekanisk ridder, der var i stand til at sidde ned og bevæge sit hoved og sine arme. I 1769 udviklede Wolfgang von Kempelen den "mekaniske tyrker", en menneskelignende automat, der kunne spille skak, selvom den blev styret af et skjult menneske.
I 1920/1921 introducerede Karel Čapek udtrykket "robot" i sit skuespil "RUR", inspireret af det tjekkiske ord "robota", som oversættes til "tvangsarbejde". På verdensudstillingen i 1939 præsenterede Westinghouse Electric robotten "Elektro", som kunne tale og reagere på kommandoer. I 1940'erne udviklede George Devol industrirobotten "Unimate", som revolutionerede industriel produktion ved at automatisere gentagne opgaver. I 1942 formulerede Isaac Asimov de velkendte "Robottens tre love" i sine science fiction-historier, der gav etiske retningslinjer for interaktion med robotter.
I 1948 udgav Norbert Wiener sit banebrydende værk "Cybernetics", som omhandlede kontrol og kommunikation i maskiner og levende væsener og dermed havde en betydelig indflydelse på udviklingen af robotteknologi. Samme år skabte William Grey Walter de autonome robotter "Elmer" og "Elsie", som kunne reagere på miljøændringer. Endelig, i 1950, introducerede Alan Turing Turing-testen, et koncept designet til at vurdere en maskines evne til at udvise intelligent adfærd, der ikke kan skelnes fra et menneskes.
Det 20. århundrede: Den moderne robotteknologis begyndelse
Det 20. århundrede markerede begyndelsen på moderne robotteknologi, karakteriseret ved teoretiske fundamenter og indledende praktiske anvendelser. Udtrykket "robot" blev opfundet i 1920/1921 af Karel Čapek i hans skuespil "RUR (Rossums universelle robot)", afledt af det tjekkiske ord "robota", der betyder tvangsarbejde. En tidligere velkendt menneskelignende robot var "Electro", præsenteret af Westinghouse på verdensudstillingen i New York i 1939, i stand til at reagere på stemmekommandoer og tale simple sætninger. Isaac Asimov bidrog væsentligt til den etiske diskussion med sine "Robotikkens tre love" (1942) og populariserede udtrykket "robotik" som robotvidenskaben. Samtidig lagde pionerer som Norbert Wiener med sit arbejde om kybernetik (1948) og William Grey Walter med sine tidlige autonome robotter (1948) et vigtigt teoretisk og praktisk fundament. Alan Turings udgivelse af Turing-testen (1950) gav en konceptuel ramme for evaluering af maskinintelligens. Selvom den ikke var menneskelignende, var udviklingen af den første industrirobot, Unimate, af George Devol i 1940'erne til 1960'erne et afgørende skridt inden for automatiseringsteknologi og revolutionerede industriel produktion. Denne periode var præget af en intens litterær og videnskabelig debat om de sociale, etiske og teknologiske udfordringer ved robotteknologi.
Vigtige milepæle efter 1970: Fremkomsten af funktionelle humanoider
Efter 1970 begyndte æraen med funktionelle humanoide robotter, som var i stand til at udføre stadig mere komplekse opgaver.
- WABOT-1 (1972-1973, Waseda Universitet): Denne robot betragtes som verdens første fuldt funktionelle, intelligente humanoide robot. WABOT-1, der blev udviklet med det formål at skabe en "personlig robot", kunne gå, kommunikere med en person på japansk, måle afstande og retninger til objekter ved hjælp af kunstige øjne og ører samt gribe og bære objekter med hænderne.
- WABOT-2 (1984, Waseda Universitet): WABOT-2 var designet som en "speciel robot" og var en humanoid musiker, der kunne læse noder og spille på et elektronisk orgel.
- Honda E-serien (1986-1993) & P-serien (1993-1997): Honda var pionerer inden for tobenet bevægelse. E-serien tjente grundforskning, mens P-serien førte til mere avancerede prototyper. P2 (1996) var den første selvregulerende, tobenede robot, og P3 (1997) var den første fuldt uafhængige tobenede humanoide robot, der var i stand til at gå uden eksterne kabler.
- ASIMO (2000, Honda): Som Hondas ellevte tobenede humanoide robot var ASIMO i stand til at køre, interagere og udføre semi-autonome opgaver. En forbedret version blev introduceret i 2011. ASIMO blev optaget i Robot Hall of Fame i 2004. Udviklingen blev afbrudt i 2018, og ASIMO blev officielt pensioneret i 2022. Afbrydelsen af projekter som ASIMO signalerer ikke nødvendigvis fiasko, men ofte en strategisk omlægning mod mere praktiske eller økonomisk levedygtige anvendelser. Dette afspejler en markedsmodenhed, hvor investeringer i forskning og udvikling i stigende grad skal afstemmes med specifikke markedsbehov og rentabilitet.
- HRP-serien (Japan, AIST/Kawada): Humanoid Robotics Project (HRP) startede med modificerede Honda P3-robotter og videreudviklede dem. HRP-2 (2002) var en tobenet gående robot. HRP-4C “Miim” (2009) var en kvindedesignet robot, der kunne synge og danse.
- Actroid (2003, Osaka University/Kokoro): Denne robot var kendetegnet ved en realistisk silikonehud og fokuserede på et menneskelignende udseende.
- HUBO (2005, KAIST): Var Sydkoreas første gående menneskelignende robot.
- Nao (2006, Aldebaran Robotics/SoftBank): En lille, programmerbar menneskelignende robot med open source-tilgange, der har fundet udbredt anvendelse inden for forskning og undervisning.
- Atlas (2013-nu, Boston Dynamics): Atlas, der oprindeligt blev udviklet til DARPA Robotics Challenge, er en yderst dynamisk humanoid robot, der er i stand til at udføre komplekse bevægelser såsom at gå, løbe, hoppe og lave baglæns saltoer. En fuldt elektrisk version med forbedret fingerfærdighed blev afsløret i april 2024. DARPA Robotics Challenge fungerede som en central katalysator, der flyttede grænserne for humanoide evner i katastrofescenarier og fremmede innovationer, der nu finder vej til kommercielle produkter. Den avancerede mobilitet og robusthed, der er udviklet til disse udfordringer, er nu kendetegnende for kommercielle eller næsten-produktionsrobotter.
- Valkyrie (2013, NASA): Valkyrie, der også blev udviklet til DARPA Robotics Challenge, blev designet til brug i beskadigede, menneskeskabte miljøer og har potentiale til rummissioner.
- Seneste bemærkelsesværdige udviklinger (efter 2020):
- Ameca (Engineered Arts, 2022): Kendt for sit ekstremt udtryksfulde ansigt.
- Optimus (Tesla, 2022): En universal humanoid designet til brug i produktionsindustrien og potentielt i hjemmet.
- Unitree G1 (2024): En relativt billig humanoid robot.
- Figur 01/02 (Figur AI): Universal humanoider, der allerede testes i industrielle pilotprojekter.
Historiske udviklinger viser et tydeligt skift fra universitetsdrevet grundforskning (f.eks. Waseda, Hondas tidlige arbejde) til kommercielt drevet udvikling med specifikke anvendelsesmål (f.eks. Teslas Optimus til produktion, Agilitys Digit til logistik). Dette indikerer feltets stigende modenhed og dets voksende økonomiske levedygtighed.
Kerneteknologier og komponenter
Humanoide robotters evner er baseret på et komplekst samspil mellem forskellige kerneteknologier og -komponenter. Disse spænder fra mekaniske systemer, der leverer bevægelse og struktur, til avancerede sensorer til at opfatte miljøet og sofistikerede software- og AI-arkitekturer, der muliggør kontrol, læring og interaktion. Udvikling på hvert af disse områder er afgørende for udviklingen af humanoide robotter som helhed.
Mekaniske systemer
De mekaniske systemer danner det fysiske fundament for humanoide robotter og omfatter aktuatorer til bevægelse, materialer til struktur og energisystemer til drift.
Aktuatorer
Aktuatorer er de motorer, der er ansvarlige for bevægelse i en robot, og de efterligner funktionen af menneskelige muskler og led. Ideelle aktuatorer bør have høj effekttæthed, lav masse og små dimensioner.
- Elektriske aktuatorer: Disse er den mest almindelige type og typisk mindre. Til led i menneskestørrelse kan det dog være nødvendigt med flere elektriske aktuatorer pr. led for at generere tilstrækkelig kraft (f.eks. HRP-2). Fremskridt inden for permanente magneter (f.eks. neodym-jern-bor) har øget effekttætheden af elektriske motorer betydeligt, hvilket har mindsket forskellen til hydrauliske systemer. Elektriske aktuatorer er kendetegnet ved høj effektivitet (75-80%), færre komponenter og lavere vedligeholdelseskrav sammenlignet med hydrauliske systemer. Tendensen mod elektriske aktuatorer, selv i meget dynamiske robotter som den nye Atlas, signalerer en markedsmodenhed med fokus på kommerciel levedygtighed (effektivitet, vedligeholdelse, omkostninger) snarere end rå topydelse. Dette vil fremskynde deres anvendelse i industrielle og potentielt forbrugerapplikationer.
- Hydrauliske aktuatorer: Disse tilbyder højere effekt og bedre momentkontrol, men kan være meget store (f.eks. den originale Atlas). Elektrohydrauliske aktuatorer (EHA) tilbyder en løsning til at afhjælpe dette størrelsesproblem. Hydrauliske systemer udviser høj stødmodstand, men har lavere effektivitet (40-55%) og kræver mere vedligeholdelse.
- Pneumatiske aktuatorer: De fungerer på basis af gassers kompressibilitet; et velkendt eksempel er McKibben-musklen.
Kawasaki udvikler for eksempel "Hydro Servo Muscle", en elektrohydraulisk aktuator designet til at tilbyde høj stødmodstand og effekttæthed til sin humanoide robot Kaleido. Boston Dynamics' beslutning om at gøre den nye Atlas fuldt elektrisk antyder en tendens mod kommercialisering og bredere anvendelighed.
Sammenlignende analyse af aktuatorteknologier til humanoide robotter
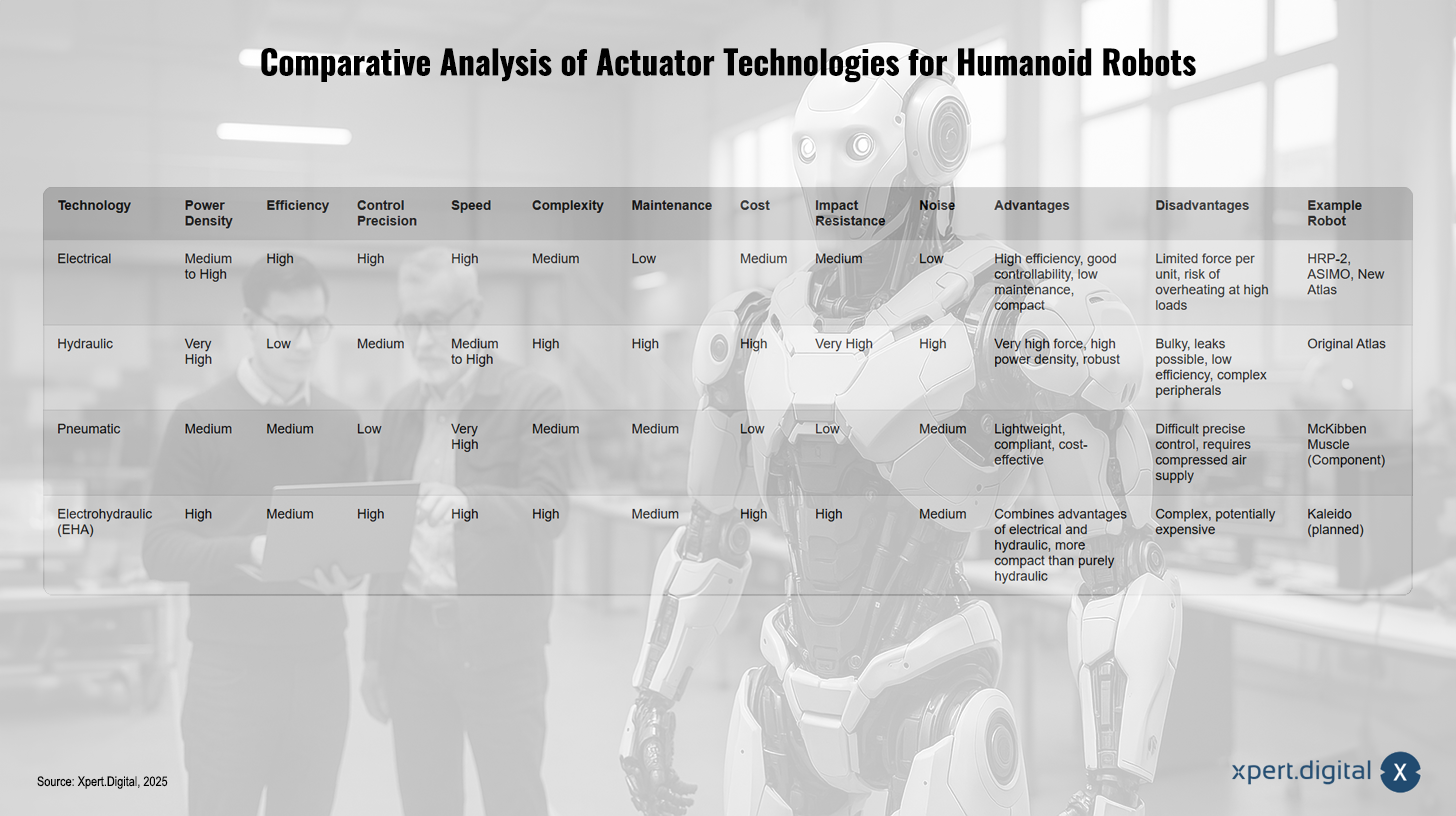
Sammenlignende analyse af aktuatorteknologier til humanoide robotter – Billede: Xpert.Digital
En sammenlignende analyse af aktuatorteknologier til humanoide robotter viser, at elektriske aktuatorer tilbyder høj effektivitet, god kontrollerbarhed, lave vedligeholdelseskrav og kompakthed, men er begrænsede i maksimal kraft og overophedning – eksempler inkluderer HRP-2, ASIMO og den nye Atlas. Hydrauliske aktuatorer tilbyder meget høj kraft, høj effekttæthed og robusthed, men er store, ineffektive, tilbøjelige til lækager og kræver komplekse periferiudstyr, som demonstreret af den originale Atlas. Pneumatiske aktuatorer er attraktive på grund af deres lethed, eftergivenhed og omkostningseffektivitet, men er vanskelige at styre præcist og kræver trykluftforsyning; et eksempel er McKibben-musklen. Elektrohydrauliske aktuatorer (EHA) kombinerer styrkerne ved elektriske og hydrauliske drev, er mere kompakte end rent hydrauliske systemer, men er komplekse og potentielt dyre, som det er tilfældet med den planlagte Kaleido.
Materialer og strukturelt design
Letvægtsstrukturer er afgørende for fleksibilitet, energieffektivitet og forlænget batterilevetid hos humanoide robotter. Et højt belastnings-til-vægt-forhold og høj strukturel stivhed er ønskeligt. Evolutionære strukturelle optimeringsmetoder (ESO) bruges til at reducere vægten af rammestrukturer betydeligt (med 50,15 % i én undersøgelse) uden at gå på kompromis med stivhed eller vibrationsadfærd. De anvendte materialer omfatter magnesiumlegeringer og polymerharpikser, som anvendt i ASIMO.
Energisystemer (batterier)
Strømforsyning er en af de største udfordringer. Lithium-ion (Li-ion) og lithiumjernfosfat (LiFePO₄) batterier anvendes ofte. Tesla Optimus bruger for eksempel et 2,3 kWh, 52V system, mens Unitree H1 bruger et 15 Ah (0,864 kWh) batteri. Valkyries batteri har en kapacitet på 1,8 kWh og giver en driftstid på cirka en time.
De vigtigste udfordringer er den begrænsede energitæthed, som fører til korte driftstider; den høje effekt, der kræves til dynamiske handlinger; den langsomme opladningshastighed (industrielle applikationer kræver ofte ~20 timers drift, mens det i øjeblikket er mere som 4-6 timer); og batterisikkerhed under ekstreme miljøforhold. Der forventes fremskridt inden for semi-solid-state og solid-state-batterier, som lover højere energitætheder (f.eks. Xinwangda med 500 Wh/kg, Farasis Energy med >330 Wh/kg, REPT med >400 Wh/kg). Hurtigopladningsteknologier er også afgørende.
Relateret til dette:

Sensor- og perceptionssystemer
Humanoide robotter skal opfatte deres omgivelser præcist for at kunne interagere sikkert og effektivt. Perception spiller en fundamental rolle i at muliggøre problemfri interaktion med mennesker og omgivelserne. Det er ikke tilstrækkeligt udelukkende at stole på visuelle systemer til komplekse manipulationer og sikre interaktioner i rodede eller skjulte miljøer. Derfor er proprioception og taktil sansning ved at blive de næste store frontlinjer inden for sensorteknologi for humanoider. Begrænsningerne ved visuel opfattelse i opgaver som at gribe skjulte genstande eller anvende præcise kræfter driver en betydelig forsknings- og udviklingsindsats inden for disse andre sensoriske modaliteter. Succeser på disse områder vil åbne op for et nyt niveau af manipulerende evner.
Visuelle systemer
Kameraer (RGB, dybdekameraer), LiDAR, radar og ultralydssensorer bruges til miljøregistrering, objektdetektion og navigation. Tesla Optimus er i høj grad afhængig af kameraer (en multikameraopsætning svarende til dens køretøjer), mens Boston Dynamics Atlas bruger LiDAR-, dybde- og RGB-sensorer. Valkyrie anvender Carnegie Robotics Multisense SL-systemet (laser, stereo, IR-struktureret lys) samt yderligere farekameraer.
Auditive systemer
Mikrofoner bruges til talegenkendelse og optagelse af omgivende støj.
Taktile sensorer
Dette er afgørende for manipulation, genkendelse af objektegenskaber (form, stivhed, blødhed) og sikker interaktion. Det omfatter kraft-, tryk-, moment-, slip- og temperatursensorer. Den menneskelige hånd har cirka 17.000 taktile receptorer; at kopiere dette er en enorm udfordring. Fremskridt omfatter fleksible elektroniske skins (e-skins) og avancerede AI-algoritmer. Virksomheder som Sanctuary AI (Phoenix-robot), Meta AI (Digit 360 med GelSight-teknologi) og Duke University (SonicSense ved hjælp af akustik) gør fremskridt på dette område. Taktile sensorer muliggør blind gribning, gliddetektion og undgåelse af overdreven kraft, hvilket er særligt vigtigt, da mange nuværende robotgribere stadig er simple tofinger- eller sugekopsystemer.
Proprioception
Dette er sansen af ens egen kropsposition og bevægelse uden visuelle eller auditive stimuli og er afgørende for robust kontrol, især i bløde robotter. Selv for biologiske systemer er dette en udfordring; nuværende robotter mangler ofte denne rige feedback. KineSoft-frameworket bruger for eksempel belastningssensorarrays til formestimering i bløde robothænder.
Sensorfusion og tilstandsestimering
Kombination af data fra flere sensorer (multisensorfusion) ved hjælp af teknikker som Bayesianske filtre og optimeringsmetoder (maximum a posteriori, MAP) er afgørende for robust intern tilstandsestimering og forståelse af det eksterne miljø. Maskinlæring foretrækkes i stigende grad frem for regelbaserede systemer i denne sammenhæng.
Software-, AI- og kontrolarkitekturer
Humanoide robotters intelligens og adfærd bestemmes af kompleks software, avancerede AI-modeller og sofistikerede kontrolarkitekturer. Udviklingen af individuelle komponenter (aktuatorer, sensorer, batterier) er i stigende grad drevet af kravene fra AI og læringsbaserede kontrolsystemer. Dette skaber en feedback-loop, hvor AI-fremskridt nødvendiggør bedre hardware, og forbedret hardware muliggør mere kompleks AI. AI-modeller til komplekse opgaver såsom helkropsmanipulation eller agil bevægelse kræver meget responsive aktuatorer, tæt sensorisk feedback (især taktil) og tilstrækkelig kraft. Læringsbaserede tilgange drager for eksempel fordel af hardware designet til maskinlæringskompatibilitet (f.eks. simpel dataindsamling, robuste sensorer). Denne samudvikling er afgørende for at overvinde nuværende præstationsplateauer.
Bevægelse og dynamisk ligevægt
Opretholdelse af dynamisk ligevægt er afhængig af koncepter som Zero Moment Point (ZMP). Model Predictive Control (MPC) og Whole-Body Control (WBC) er populære tilgange til at integrere sofistikerede modeller og generere kompatible bevægelser. Parametervalg er fortsat en udfordring, da manuel tuning er meget arbejdskrævende. Metoder som DiffTune anvender differentierbar programmering til automatisk tuning. Læringsmetoder (f.eks. forstærkningslæring) anvendes til tobenet bevægelse og restitution efter fald.
Manipulation og fingerfærdighed
Helkropskontrol koordinerer adskillige frihedsgrader til komplekse opgaver. Gengivelse af menneskelige finmotoriske færdigheder er et betydeligt forskningsområde. Helkropsmanipulation, dvs. at bruge en hvilken som helst kropsdel til interaktion, udgør en stor udfordring. Robotten RoboPanoptes bruger for eksempel helkropssyn (21 kameraer) til helkropsfærdighed. Læring fra menneskelige demonstrationer (imitationslæring) er en central tilgang.
Navigation og miljøinteraktion
Stiplanlægning, undgåelse af forhindringer og selvkollisionsdetektion er afgørende for bevægelse i komplekse miljøer. SLAM (Simultaneous Localization and Mapping) kombineret med Reinforcement Learning (RL) bruges til navigation af mobile robotter for at forbedre konvergens og reducere kollisioner.
Menneske-robot-interaktion (HRI) og kognitive evner
Sprog-sprogmodeller (LLM'er) og vision-sprogmodeller (VLM'er) forbedrer robotters logiske ræsonnement og kontekstuelle forståelse, hvilket muliggør mere naturlige, dialogorienterede interaktioner. Robotter får "personligheder" og nysgerrig adfærd. Udfordringerne omfatter sprogets tvetydighed, som kan føre til fejl, og kompleksiteten ved at knytte sprog til fysiske handlinger. Finjustering af LLM'er på robotdata (Vision Language-Action Models – VLA'er) er en lovende tilgang.
Læringsparadigmer og AI-modeller
Der er et skift i gang fra regelbaserede systemer til maskinlæring (ML) og deep learning (DL). Forstærkningslæring (RL) bruges til motoriske færdigheder, ligesom imitation af læring fra menneskelige demonstrationer. Overførsel fra simulering til virkelighed er afgørende for effektiv træning; ToddlerBot-platformen blev for eksempel designet til ML-kompatibilitet og dataindsamling. Det endelige mål er kunstig generel intelligens (AGI), som vil gøre det muligt for robotter at lære, ræsonnere og tilpasse sig en bred vifte af opgaver som mennesker uden specifik forprogrammering. "Black box"-karakteren af nogle avancerede AI-modeller, især inden for deep learning, udgør en udfordring for sikkerhedskritiske applikationer og fejlfinding. Dette nødvendiggør nye tilgange til forklarlighed og verifikation i humanoide kontrolsystemer. Mens AI muliggør hidtil usete muligheder, er vanskeligheden ved at forstå, hvordan deep learning-modeller når frem til beslutninger, et problem, især for robotter, der interagerer tæt med mennesker eller opererer i farlige miljøer. Denne mangel på fortolkningsevne kan hindre sikkerhedscertificering og fejlretning og drive forskning mod mere transparent AI eller mere robuste valideringsmetoder.
🎯🎯🎯 Drag fordel af Xpert.Digital's omfattende, femdobbelte ekspertise i én omfattende servicepakke | BD, R&D, XR, PR & optimering af digital synlighed

Drag fordel af Xpert.Digital's omfattende, femdobbelte ekspertise i en omfattende servicepakke | R&D, XR, PR & optimering af digital synlighed - Billede: Xpert.Digital
Xpert.Digital besidder dybdegående viden på tværs af forskellige brancher. Dette giver os mulighed for at udvikle skræddersyede strategier, der er præcist afstemt med kravene og udfordringerne i dit specifikke markedssegment. Ved løbende at analysere markedstendenser og overvåge brancheudviklingen kan vi handle proaktivt og tilbyde innovative løsninger. Kombinationen af erfaring og ekspertise skaber merværdi og giver vores kunder en afgørende konkurrencefordel.
Mere information her:
Kommercialisering og potentiale: Markedsgennembruddet for humanoide robotter
Anvendelser af humanoide robotter (efter sektor, med fokus på 2025)
Humanoide robotter finder i stigende grad anvendelse i en bred vifte af sektorer, hvor deres menneskelignende form og voksende evner gør dem ideelle til opgaver, der traditionelt udføres af mennesker. Inden 2025 forventes betydelige fremskridt inden for testning og indledende implementering, især inden for industrisektorer, sundhedspleje og nicheapplikationer. Den menneskelignende form er et tveægget sværd: Selvom den letter integration i menneskelige miljøer og interaktion mellem menneske og robot (HRI), rejser den også høje forventninger til fingerfærdighed og intelligens, som i øjeblikket er vanskelige at opfylde. Dette kan føre til skuffelse, hvis evnerne ikke lever op til det antropomorfe løfte. Den menneskelige hånd besidder utrolig fingerfærdighed, og menneskelig intelligens er meget tilpasningsdygtig. Nuværende robotter kæmper, på trods af forbedringer, stadig med fin manipulation og robust drift i ustrukturerede miljøer. Denne kløft mellem udseende og faktisk ydeevne kan have en negativ indvirkning på accept og opfattede fordele, hvis den ikke håndteres omhyggeligt.
Relateret til dette:

Industriel automatisering (produktion og logistik)
Inden for industriel automation lover humanoide robotter at strømline samlebånd, vedligeholdelses- og inspektionsarbejde samt logistikprocesser.
Produktion: Humanoide robotter hjælper menneskelige arbejdere med præcisionsopgaver, løft af tunge byrder og gentagne aktiviteter.
- Casestudie: BMW & Figure AI: Figure 02-robotter er implementeret på BMW-fabrikken i Spartanburg, South Carolina, til opgaver som chassismontering og transport af dele. Efter indledende pilotprojekter i 2024 fandt permanent implementering sted i begyndelsen af 2025. Funktionelle opgraderinger inden november 2024 resulterede i en stigning på 400 % i bevægelseshastigheden, hvilket gør det muligt for robotterne at placere op til 1.000 komponenter om dagen. Figure AI planlægger at producere 100.000 til 200.000 enheder i løbet af de næste fire år (2025-2028).
- Casestudie: Mercedes-Benz & Apptronik: Apollo-robotten assisterer medarbejdere i produktionshallen.
- Tesla planlægger at anvende Optimus-robotter til opgaver som læsning af metalplader i sine fabrikker, og flere tusinde enheder forventes at udføre meningsfulde opgaver inden 2025. BYD sigter mod at anvende 1.500 humanoide robotter inden 2025 og skalere op til 20.000 inden 2026.
Logistik og lager: Humanoide robotter optimerer materialehåndtering, lagerstyring samt pluk-, paknings- og sorteringsprocesser.
- Casestudie: Amazon & Agility Robotics: Amazon tester Digit-robotten til håndtering og genbrug af containere i sine forsknings- og udviklingscentre og lagre. Digit er designet til 8-timers vagter. Amazon tester også Apollo-robotten fra Apptronik.
- Humanoider kan reducere menneskelig arbejdskraft i forbindelse med modtagelse og losning af varer, opbevaring, ordreplukning, pakning, mærkning, forsendelse og lastning samt lagerbeholdning.
- IDTechEx registrerede kun et begrænset antal pilotprojekter (<100 humanoider) i lagre i begyndelsen af 2025. Storstilet implementering (tusindvis af enheder) forventes ikke før udgangen af 2025 på grund af testcyklusser på 18-30 måneder. Et gennembrud inden for logistik forventes i 2026-2027.
De mest succesfulde applikationer til dato, såsom Moxi inden for hospitalslogistik og Digit inden for containerhåndtering på lagre, fokuserer på specifikke, gentagne opgaver i relativt strukturerede miljøer snarere end generel autonomi. Dette antyder en vej til bredere anvendelse: start med specialiserede opgaver og generaliser derefter, efterhånden som teknologien modnes. Moxi foretager leverancer, Digit flytter containere. Disse er klart definerede opgaver. Denne tilgang står i kontrast til visionen om universalrobotter. Succesen med opgavespecifikke humanoider leverer ROI og genererer data for at forbedre generelle funktioner, hvilket skaber en positiv cyklus. Denne trinvise tilgang er mere praktisk end at forsøge at implementere fuld generel kapacitet fra starten.
Sundhedspleje og ældrepleje
I denne sektor tilbyder humanoide robotter støtte til medicinsk personale, patientpleje, social støtte og rehabiliteringsforanstaltninger.
Hospitalslogistik: Moxi fra Diligent Robotics er implementeret i over 24 sundhedssystemer og har gennemført næsten en million leverancer (laboratorieprøver, forbrugsvarer), hvilket sparer personalet betydelig tid og gangafstande. ROI er tydeligt i øget effektivitet og reduceret personaleudbrændthed. Robotics-as-a-Service (RaaS)-modellen vil sandsynligvis være en nøgledriver for adoption i små og mellemstore virksomheder (SMV'er) og for implementering af humanoider i sektorer, hvor høje startinvesteringer er uoverkommelige, hvilket demokratiserer adgangen til avanceret robotteknologi. Høje anskaffelsesomkostninger er en væsentlig barriere. RaaS-modellen sænker adgangsbarrieren ved at flytte omkostninger fra kapitaludgifter (Capex) til driftsomkostninger (Opex). Moxis succes med denne model inden for sundhedsvæsenet demonstrerer dens rentabilitet. Efterhånden som humanoider bliver mere kapable, kan RaaS gøre det muligt for mindre virksomheder eller afdelinger at bruge dem uden massive initialinvesteringer, hvilket potentielt accelererer markedsindtrængningen.
Ældrepleje, selskab og assistance: Robotter som Grace (Hanson Robotics), Pepper (SoftBank), Nadine, PARO, ElliQ, Temi og Toyota HSR tilbyder social interaktion, påmindelser om medicin, helbredsovervågning og støtte til daglige aktiviteter. Studier viser positivt engagement og følelsesmæssig støtte.
Rehabilitering: Humanoider som Baxter og NAO bruges som terapiassistenter til slagtilfældepatienter og børn, hvor de vejleder øvelser og holder patienterne engagerede.
Kirurgisk assistance: Da Vinci Surgical System yder støtte under minimalt invasive operationer.
Rumudforskning og farlige miljøer
Rumforskning: støtte til astronauter, udførelse af ekstravehikulære aktiviteter (EVA'er), forberedelse af levesteder og vedligeholdelse på ISS eller fremtidige måne-/Marsbaser. Eksempler inkluderer NASAs Robonaut 2 (den første humanoide i rummet), Valkyrie (designet til Mars-missioner) og DLR-robotterne Rollin' Justin, Agile Justin og TORO. Autonom drift er afgørende på grund af kommunikationsforsinkelser. Modulært design for reparationsmuligheder er vigtigt (f.eks. Valkyrie).
Farlige miljøer (katastrofehjælp, nuklear sektor): Navigation i farligt terræn, eftersøgning og redning, levering af hjælpeforsyninger, håndtering af giftige materialer, brandbekæmpelsesstøtte. Eksempler: Atlas fra Boston Dynamics (designet til sådanne opgaver), Spot ved Fukushima Daiichi til rekognoscering, strålingsmåling og prøveudtagning af affald. Ved Fukushima bruges robotter til overvågning, dekontaminering og forberedelse til fjernelse af brændstofaffald.
Personlig assistance og husholdningsapplikationer
Humanoide robotter er beregnet til at overtage huslige pligter (rengøring, madlavning, tøjvask), yde sikkerhed og fungere som ledsagere i fremtiden. Dette felt er stadig i sin meget tidlige fase. NEO Gamma fra 1X Technologies er blevet testet i et hjemmemiljø til opgaver som at lave kaffe og hjælpe med madlavning (fjernstyret). Udfordringerne omfatter ustrukturerede hjemmemiljøer, sikkerhed, omkostninger og den nødvendige generelle intelligens.
Uddannelse, underholdning og kundeservice
Uddannelse: Interaktive undervisningsassistenter, personlig læring, især for STEM-fag og elever med særlige behov. Nao fra SoftBank Robotics er meget udbredt (>13.000 enheder i over 70 lande) og bruges til at undervise i programmering, kulturarv, matematiske begreber og til at støtte børn med autisme. Undersøgelser viser, at Nao øger engagementet, men kan have brugervenlighedsproblemer i støjende miljøer.
Underholdning: Interaktive værter, performere i temaparker, ved events og i medierne. Ameca fra Engineered Arts er kendt for sine naturtro ansigtsudtryk. RoboThespian bruges til teaterforestillinger. Markedet for underholdnings-humanoider forventes at vokse betydeligt.
Kundeservice og hotel- og restaurationsbranchen: Receptionister, informationsassistenter, concierger i detailhandlen, hoteller og banker. Pepper fra SoftBank er blevet testet som receptionsrobot på hospitaler og i detailbutikker.
Nye og nicheapplikationer
Andre anvendelsesområder omfatter militær og forsvar (rekognoscering, ammunitionsrydning, træningssimuleringer) samt landbrug og byggeri.
Vigtige anvendelsesområder og egnethed af humanoide robotter (fra 2025)
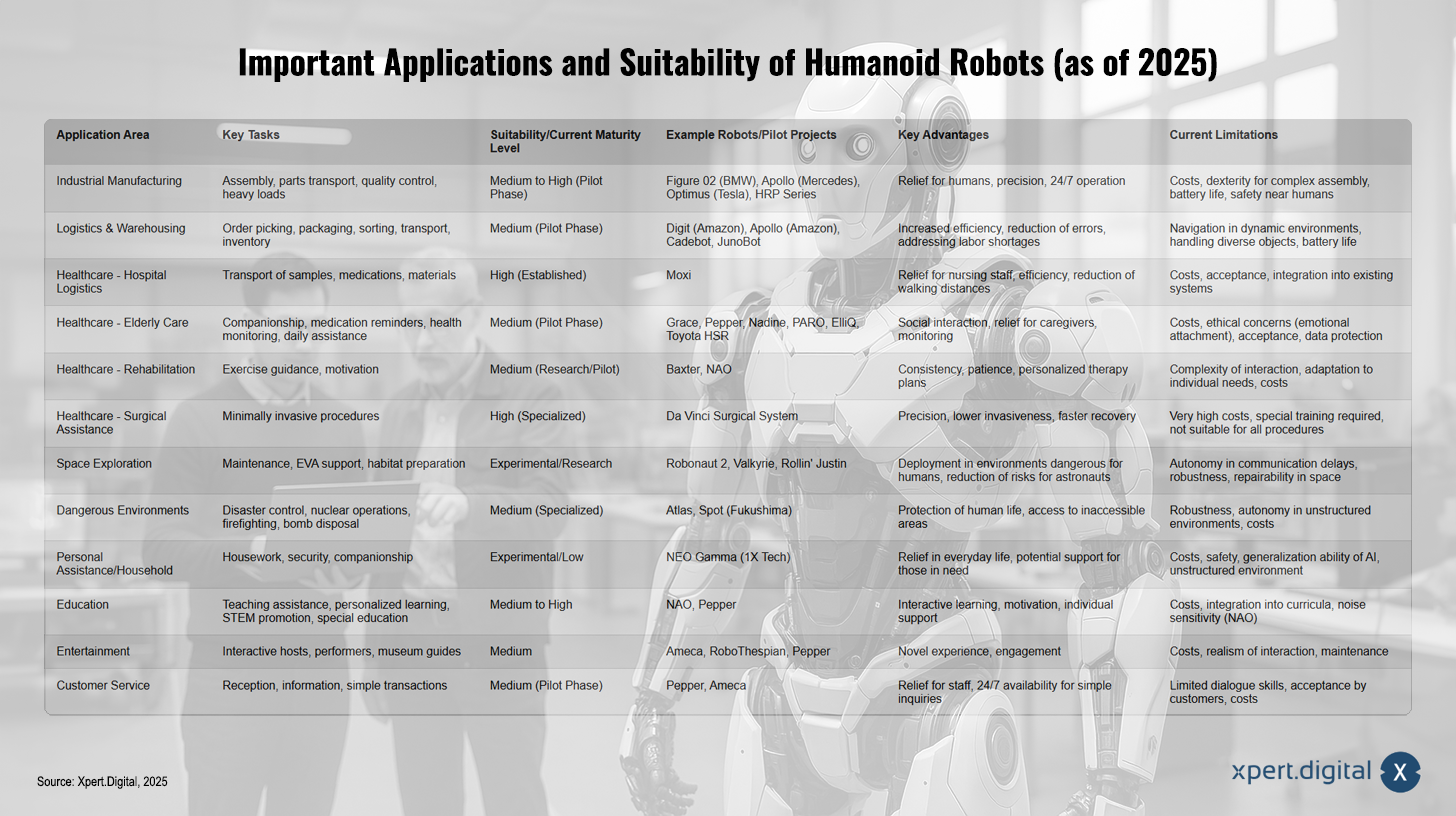
Vigtige anvendelsesområder og egnethed for humanoide robotter (fra 2025) – Xpert.Digital
Nøgleanvendelsesområder og egnetheden af humanoide robotter i 2025 omfatter adskillige felter. Inden for industriel fremstilling overtager robotter opgaver som montering, transport af dele, kvalitetskontrol og flytning af tunge læs. Med projekter som Figure 02 (BMW), Apollo (Mercedes), Optimus (Tesla) og HRP-serien har de nået et mellemstort til højt modenhedsniveau, men er stadig begrænset af omkostninger, batterilevetid og sikkerhed i umiddelbar nærhed af mennesker. Inden for logistik og lagerbygning bruges humanoide robotter til ordreplukning, sortering og transport. Eksempler som Amazons Digit og Apollo, eller Cadebot og JunoBot, demonstrerer lovende pilotprojekter, selvom der fortsat er udfordringer som dynamiske miljøer og håndtering af forskellige objekter. Inden for sundhedsvæsenet findes robotter primært inden for hospitalslogistik, hvor modeller som Moxi er etableret for at aflaste plejepersonalet ved at transportere prøver og medicin. Inden for ældrepleje assisterer humanoide robotter som Grace og Pepper med daglige aktiviteter, men etiske bekymringer og databeskyttelsesproblemer forbliver hindringer. Til rehabilitering, såsom motivationsøvelser, yder robotter som Baxter og NAO støtte; Der er dog behov for yderligere forskning for at forfine interaktionen. En pioner inden for kirurgisk assistance er da Vinci Surgical System, som muliggør minimalt invasive procedurer med høj præcision, men kun er egnet til specifikke anvendelser og er meget dyrt.
Inden for rumforskning bruges robotter som Robonaut 2, Valkyrie og Rollin' Justin til at udføre vedligeholdelse og forberedelse af levesteder i farlige miljøer, hvilket minimerer risici for astronauter. Der er dog fortsat udfordringer med hensyn til autonomi, robusthed og reparationsmuligheder. I farlige miljøer, såsom katastrofehjælp eller atomscenarier, yder robotter som Atlas og Spot essentielle tjenester. Personlig assistance og husholdningsadministration er fortsat eksperimentelle med prototyper som NEO Gamma, hvor omkostninger, sikkerhed og fleksibilitet i ustrukturerede miljøer stadig udgør hindringer. Inden for uddannelse fremmer robotter som NAO og Pepper interaktiv læring og personlig support, mens omkostninger og integration af læseplaner fortsat er udfordringer. Systemer som Ameca og RoboThespian er også til stede inden for underholdning og tilbyder nye oplevelser som museumsguider eller performere. Inden for kundeservice yder de support i receptionen og med information og tilbyder fordelen af tilgængelighed døgnet rundt. Begrænsede dialogmuligheder og accept er dog problemer. Samlet set viser humanoide robotter et enormt potentiale, men står i øjeblikket stadig over for teknologiske, økonomiske og sociale hindringer for at nå deres fulde potentiale.
Markedslandskab og kommercialisering (fra 2025)
Markedet for humanoide robotter i 2025 er i en dynamisk fase med overgang fra forskning og udvikling til begyndelsen af kommerciel brug. Et stigende antal virksomheder, fra etablerede teknologivirksomheder til agile startups, driver innovation og kæmper om markedsandele i denne lovende sektor.
Førende virksomheder og platforme for humanoide robotter
De mest fremtrædende aktører, der driver udviklingen og kommercialiseringen af humanoide robotter, inkluderer (fra ca. 2025):
- Tesla: Med Optimus Gen 2 sigter Tesla mod brug i sin egen produktion og potentielt til generelle assistanceopgaver.
- Boston Dynamics: Electric Atlas er kendt for sin exceptionelle mobilitet og videreudvikles til forskning, industriel inspektion og katastrofehjælp.
- Figur AI: Med modellerne Figur 01, Figur 02 og de annoncerede Figur 03 fokuserer virksomheden på universalrobotter til industri og logistik, med pilotprojekter blandt andet hos BMW.
- Agilitetsrobotik: Digit-robotten er specielt designet til logistikapplikationer og testes af virksomheder som Amazon.
- Apptronik: Apollo udvikles til industrielle applikationer og logistik, med partnerskaber blandt andet fra Mercedes-Benz og Amazon.
- Unitree Robotics: Tilbyder mere agile og omkostningseffektive muligheder for forskning, uddannelse og lette industrielle opgaver med modeller som G1 og H1.
- Sanctuary AI: Phoenix-robotten sigter mod kognitive evner og menneskelignende adfærd til komplekse opgaver i forskellige sektorer.
- 1X Technologies: NEO er designet til brug i hjemmet og til hjælpeopgaver.
- PAL Robotics: En etableret europæisk producent med en række robotter (REEM, TIAGo, TALOS, ARI) til forskning, sundhedspleje og serviceapplikationer.
- Honda: Selvom ASIMO er udgået, er virksomhedens arv og grundforskning fortsat betydningsfuld for branchen.
- Ingeniørkunst: Ameca er kendt for sine ekstremt naturtro ansigtsudtryk og interaktive evner, primært til social interaktion og kundeservice.
- UBTech Robotics: Med modeller som Walker X til forskellige anvendelser.
- NEURA Robotics: 4NE-1 er designet til samarbejde mellem menneske og robot i private hjem og industrielle miljøer.
- DEEP Robotics: Dr01 er en robust humanoid til industrielle præcisionsopgaver.
- Fourier-intelligens: GR-1 bruges i forskellige sammenhænge.
Fremtrædende humanoide robotplatforme (ca. 2025)
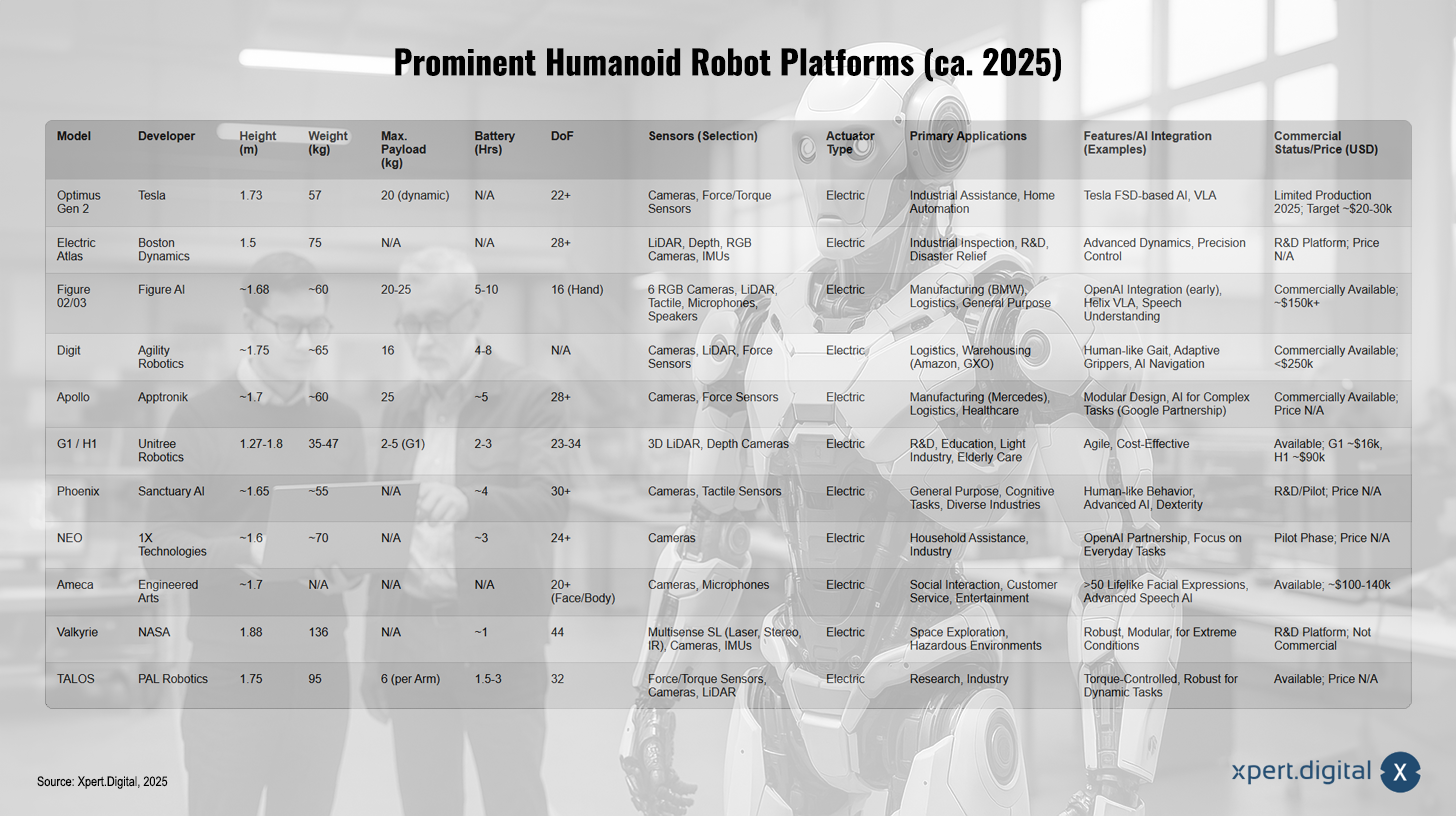
Fremtrædende humanoide robotplatforme (ca. 2025) – Billede: Xpert.Digital
Bemærk: Data er estimater eller baseret på tilgængelige oplysninger (pr. 1./2. kvartal 2025). "n/a" = ikke tilgængelig. DoF = Frihedsgrader.
Fremtrædende humanoide robotplatforme i 2025 omfatter en række imponerende modeller, der er egnede til industrielle, private og videnskabelige anvendelser. Teslas Optimus Gen 2, der er 1,73 m høj og har en dynamisk nyttelastkapacitet på op til 20 kg, er udstyret med Tesla FSD-baseret kunstig intelligens. Med begrænset produktion i 2025 er den målrettet en pris på mellem $20.000 og $30.000. Boston Dynamics fører an med sin Electric Atlas, en model, der er kendetegnet ved avanceret dynamik og præcisionskontrol, designet til industrielle inspektioner og katastrofehjælp. Figure AI tilbyder sin Figure 02/03, en model til produktion, logistik og generelle anvendelser, der bruger OpenAI-integrationer og avanceret forståelse af naturligt sprog, og til en pris på over $150.000.
Agility Robotics' Digit, til en pris på under $250.000, kan prale af en menneskelignende gangart og adaptive gribere, hvilket gør den ideel til logistik og lager. Apptroniks Apollo, der er modulært design og konstrueret til komplekse opgaver med AI, bruges allerede i produktion og sundhedspleje. Mere overkommelige alternativer, såsom Unitree Robotics G1, til en pris på omkring $16.000, tilbyder smidighed og effektivitet til lette industrielle og uddannelsesmæssige applikationer. Sanctuary AI's Phoenix skiller sig ud med sin menneskelignende adfærd og avancerede AI, mens 1X Technologies' NEO udmærker sig inden for husholdningshjælp og hverdagsopgaver. Begge er stadig i pilotfasen.
Til social interaktion og underholdning fås Engineered Arts' Ameca med over 50 livagtige ansigtsudtryk fra $100.000. NASA tilbyder Valkyrie, en robot designet til ekstreme forhold og rumudforskning, mens PAL Robotics' TALOS med sit robuste og momentstyrede design er ideel til forskning og industri. Disse robotplatforme demonstrerer bemærkelsesværdige fremskridt inden for teknologi, AI-integration og fleksibilitet, hvor hver platform er skræddersyet til specifikke krav og dermed dækker en bred vifte af applikationer.
Investerings- og finansieringstendenser
Sektoren for humanoide robotter tiltrækker betydelige venturekapitalinvesteringer, hvor finansieringen i stigende grad er koncentreret i færre, men større runder. Eksempler inkluderer Figure AI, som modtog 675 millioner dollars i februar 2024 fra investorer som Nvidia, Jeff Bezos, OpenAI og Microsoft; Physical Intelligence, som rejste 400 millioner dollars; og Apptronik, som modtog 350 millioner dollars (støttet af Google). OpenAI investerede også 23,5 millioner dollars i 1X Technologies. Globale investeringer i humanoide startups steg fra cirka 308 millioner dollars i 2020 til 1,1 milliarder dollars i 2024. Investorer er især tiltrukket af fleksible, alsidige robotter med avancerede AI-"hjerner" og applikationer inden for områder med høj vækst som medicinsk robotteknologi. Parallelt hermed fremmer nationale initiativer, især i Kina ("Made in China 2025", "14. femårsplan"), massivt robotindustrien gennem statsstøtte og udvikling af stærke indenlandske forsyningskæder.
Markedsstørrelse, vækstprognoser og segmentering
Prognoserne for væksten på markedet for humanoide robotter er konsekvent optimistiske, selvom de nøjagtige tal varierer afhængigt af analysen. Generelt forventes 2024 at markere udviklingen af avancerede prototyper, 2025 starten på masseproduktion og 2026 bredere kommerciel accept. Denne brede vifte af markedsprognoser afspejler ikke kun forskellige metoder, men også grundlæggende usikkerheder med hensyn til den hastighed, hvormed teknologiske hindringer (se afsnit 6) kan overvindes, og udbredt samfundsmæssig accept (se afsnit 7) opnås. De mere optimistiske prognoser forudsætter ofte hurtige gennembrud inden for AI og omkostningsreduktion. Den endelige markedsstørrelse vil i høj grad afhænge af, hvordan disse faktorer udvikler sig.
Oversigt over markedsvækstprognoser for humanoid robotteknologi
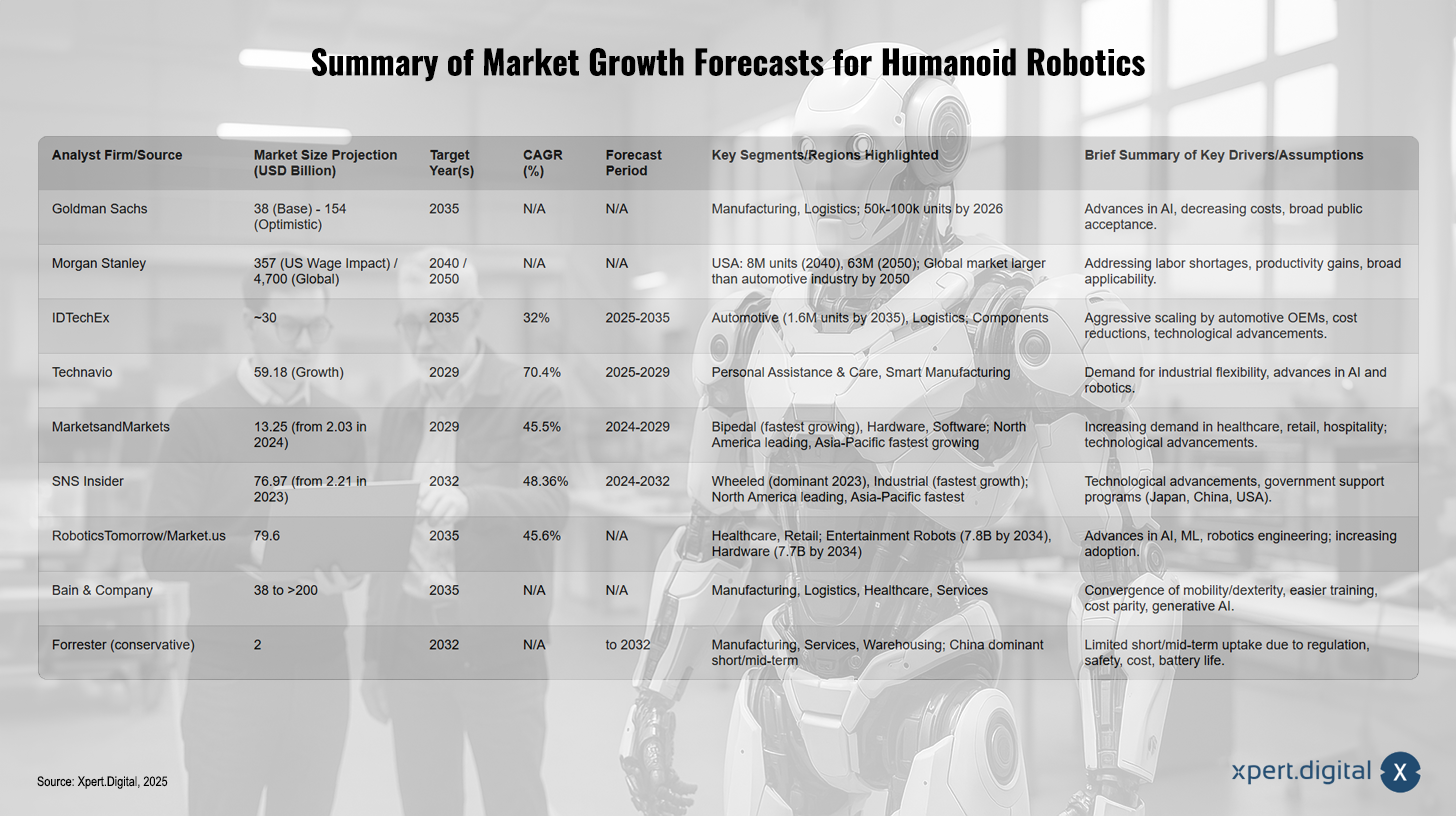
Oversigt over markedsvækstprognoser for humanoid robotteknologi – Xpert.Digital
Markedssegmentering:
- Efter komponent: Hardware (sensorer, aktuatorer, energikilder, styresystemer) og software (AI-baseret).
- Baseret på mobilitet: tobenet (dominerende, tilpasningsdygtig til logistik, sundhedspleje, uddannelse) og hjulbaseret (stabilitet, lavere omkostninger, til flade overflader). Markedet for tobenede robotter vokser hurtigst (CAGR 54,47% 2023-2028).
- Efter anvendelse: Industri (førende inden for bilindustrien, logistik), personlig assistance og pleje (betydelig vækst), forskning, uddannelse, underholdning, eftersøgnings- og redningstjenester, PR, militær.
- Regionalt: Nordamerika fører i øjeblikket an, men Asien-Stillehavsområdet (især Kina) forventes at opleve den hurtigste vækst og potentiel dominans på grund af stærke forsyningskæder og statslig støtte. Der forventes en langsommere udbredelse i Europa på grund af arbejdsmarkedslovgivning og fagforeninger. Den geopolitiske dimension (USA's lederskab inden for AI vs. Kinas dominans i forsyningskæden) kan føre til regionale opdelinger i teknologistandarder, applikationsprioriteter og markedsudvikling, hvilket potentielt kan skabe forskellige humanoide økosystemer. USA udmærker sig inden for AI og avanceret robotteknologi. Kina har en stærk produktionsbase og udvikler hurtigt sine egne humanoide systemer, ofte rettet mod forskellige primære markeder. Dette kan føre til divergerende udviklingsstier, hvor amerikanske virksomheder fokuserer på avancerede AI-drevne kapaciteter, og kinesiske virksomheder udnytter stordriftsfordele inden for produktion og omkostningsfordele. Handelspolitikker og bekymringer om national sikkerhed kan yderligere forværre disse forskelle.
Markedsvækstprognoser for humanoid robotteknologi viser en dynamisk udvikling, hvor forskellige analytikere har forskellige meninger. Goldman Sachs anslår markedet til at være mellem 38 milliarder dollars og 154 milliarder dollars i 2035 og nævner fremskridt inden for kunstig intelligens (AI), faldende omkostninger og udbredt offentlig accept som nøgledrivere. Morgan Stanley forudsiger et globalt marked, der overgår bilindustrien i 2050, med op til 63 millioner enheder på verdensplan og en betydelig indvirkning på lønningerne i USA. IDTechEx forventer en årlig vækst på 32 % for 2025-2035, drevet af teknologiske fremskridt og omkostningsreduktioner i bil- og logistiksektoren. Technavio forudser et markedsvolumen på 59,18 milliarder dollars i 2029 og identificerer personlig assistance, pleje og smart produktion som centrale vækstsegmenter på grund af fremskridt inden for AI og robotteknologi. MarketsandMarkets forudser en årlig vækst på 45,5 % frem til 2029, anført af Nordamerika og Asien-Stillehavsområdet, med stigende efterspørgsel inden for sundhedspleje, detailhandel og hotel- og restaurationsbranchen. SNS Insider fremhæver vigtigheden af statslige incitamentsprogrammer og forudser en vækst til 76,97 milliarder dollars i 2032, hvor Nordamerika er førende og Asien-Stillehavsområdet oplever den hurtigste vækst. RoboticsTomorrow/Market.us forventer et volumen på 79,6 milliarder dollars i 2035, accelereret af fremskridt inden for AI, maskinlæring og robotteknik, med særlige udsigter inden for underholdning og hardware. Bain & Company forudser et marked på 38 milliarder dollars til over 200 milliarder dollars i 2035 og ser potentiale inden for områder som produktion, sundhedspleje og generativ AI. I modsætning hertil forbliver Forrester mere konservativ og forventer kun 2 milliarder dollars i 2032 på grund af udfordringer som regulering, sikkerhed og batterieffektivitet. Samlet set er væksten drevet af fremskridt inden for teknologi, AI og en stigende efterspørgsel efter automatisering, produktivitet og effektivitet.
Forretningsmodeller (f.eks. RaaS)
"Robotics as a Service" (RaaS)-modellen vinder frem. Den giver virksomheder mulighed for at lease robotter i stedet for at foretage store startinvesteringer, hvilket gør humanoide robotter tilgængelige for små og mellemstore virksomheder (SMV'er). Direkte salgs- og leasingmodeller vil transformere det industrielle landskab. Fremkomsten af RaaS er ikke blot en finansieringsmodel, men en strategisk faktor, der kan fremskynde adoptionen betydeligt i SMV'er og nye sektorer ved at sænke adgangsbarrierer og dermed udvide markedsgrundlaget ud over store virksomheder. Høje anskaffelsesomkostninger er en stor hindring. RaaS omdanner investeringsomkostninger til driftsomkostninger, hvilket gør avanceret robotteknologi mere tilgængelig. Dette er især relevant for SMV'er, der ikke har råd til store investeringer. Hvis humanoide robotter effektivt kan implementeres via RaaS, kan dette føre til en meget hurtigere markedsindtrængning end hvis salget udelukkende var baseret på kapitalgoder, og potentielt overstige nogle konservative adoptionsprognoser.
Konkurrencedynamik og markedspositionering
Konkurrencen står mellem vertikalt integrerede udviklere (f.eks. Tesla, der udvikler hardware og AI internt) og virksomheder, der er afhængige af partnerskaber (f.eks. Figure AI i første omgang med OpenAI, Apptronik med Google). USA er førende inden for AI-uddannelse og avancerede applikationer, mens Kina dominerer i forsyningskæder, i starten med mere fokus på underholdning og uddannelse, men hurtigt indhenter det forsømte i industrisektoren. Ifølge Gartners Hype Cycle gik humanoide robotter ind i "Innovation Trigger"-fasen i 2024, selvom udbredt anvendelse stadig kan være mere end 10 år væk. Forrester rangerede humanoide robotter som en af de 10 bedste nye teknologier i 2025 og forudsiger en disruptiv effekt inden 2030.
Vores anbefaling: 🌍 Ubegrænset rækkevidde 🔗 Forbundet 🌐 Flersproget 💪 Salgskraft: 💡 Autentisk med strategi 🚀 Innovation møder 🧠 Intuition

Fra lokalt til globalt: SMV'er erobrer verdensmarkedet med en smart strategi - Billede: Xpert.Digital
I en tid, hvor en virksomheds digitale tilstedeværelse bestemmer dens succes, ligger udfordringen i at skabe en autentisk, personlig og vidtrækkende tilstedeværelse. Xpert.Digital tilbyder en innovativ løsning, der positionerer sig som krydsfeltet mellem et branchecenter, en blog og en brandambassadør. Den kombinerer fordelene ved kommunikations- og salgskanaler i en enkelt platform og muliggør publicering på 18 forskellige sprog. Samarbejde med partnerportaler og muligheden for at udgive artikler på Google News og en pressedistributionsliste med cirka 8.000 journalister og læsere maksimerer indholdets rækkevidde og synlighed. Dette repræsenterer en afgørende faktor i eksternt salg og marketing (SMarketing).
Mere information her:
Det næste kapitel i robotteknologi: Menneske-maskine-transformation
Vigtige udfordringer inden for humanoid robotteknologi og dens fremtid
Trods de hurtige fremskridt og det enorme potentiale står humanoide robotteknologi over for en række betydelige tekniske, kommercielle og samfundsmæssige udfordringer, der skal overvindes for at muliggøre udbredt og vellykket implementering.
Tekniske udfordringer
Hardwarebegrænsninger:
- Batterilevetid og effekttæthed: Korte driftstider (ofte kun 2-5 timer) og lange opladningstider begrænser kontinuerlig drift betydeligt. Den høje effekt, der kræves til dynamiske handlinger, er krævende.
- Færdighed og manipulation: Det er en stor udfordring at kopiere menneskelige hænders færdigheder til finmotoriske opgaver og håndtering af forskellige genstande. Nuværende gribere er ofte stadig for simple. Avancerede taktile sensorer er afgørende for dette.
- Aktuatorens ydeevne: Det er fortsat vanskeligt at finde en balance mellem ydeevne, hastighed, præcision, effektivitet og omkostninger i aktuatorer.
- Sensorrobusthed og integration: Det er en udfordring at sikre pålidelig sensorydelse under virkelige forhold og effektivt sammensmelte data fra forskellige sensortyper.
- Samlet robusthed og pålidelighed: Det skal sikres, at robotter fungerer ensartet og uden hyppige fejl i krævende, ustrukturerede miljøer.
Software og AI-kompleksitet:
- Generel intelligens og logisk ræsonnement: At opnå menneskelignende tilpasningsevne, problemløsningsevner og sund fornuft i forskellige og uforudsigelige situationer er en central udfordring. Nuværende AI-systemer kan stadig begå "dumme fejl". Udfordringen med "generel intelligens" er ikke kun et teknisk AI-problem, men er tæt forbundet med mekanisk fingerfærdighed og sensorisk skarphed. En meget intelligent robot med dårlige fysiske evner vil have begrænset anvendelse, og omvendt. Dette nødvendiggør en co-design-tilgang. For at en robot kan være universelt anvendelig, skal dens AI være i stand til at forstå og ræsonnere på tværs af en bred vifte af opgaver og miljøer. Udførelsen af disse opgaver kræver dog sofistikeret fysisk interaktion - at gribe fat i forskellige objekter, navigere i komplekst terræn. Hvis AI'en kan udvikle en plan, men hardwaren (hænder, ben, sensorer) ikke kan udføre den pålideligt eller præcist opfatte miljøet, er intelligensen ubrugelig. Dette understreger behovet for tæt kobling af AI- og hardwareudvikling i stedet for at forfølge dem isoleret.
- Menneske-robot-interaktion (HRI): Det er komplekst at skabe en naturlig, intuitiv og sikker HRI, især med ikke-ekspertbrugere. LLM'er viser potentiale, men introducerer også nye kompleksiteter.
- Læringseffektivitet og overførsel fra simulering til virkelighed: Udviklingen af algoritmer, der effektivt kan lære komplekse færdigheder med begrænsede data fra den virkelige verden og pålideligt overføre lært adfærd fra simulering til fysiske robotter, er afgørende.
- Sikkerhed og forudsigelighed: Det er afgørende at sikre sikker drift af autonome systemer, især i umiddelbar nærhed af mennesker, og at deres adfærd er forudsigelig og verificerbar. Nogle AI-modellers "sorte boks"-karakter giver anledning til bekymring i denne henseende.
Udfordringer i kommercialisering og skalerbarhed
- Omkostninger: Høje enhedsomkostninger (mellem $20.000 og over $150.000, afhængigt af model og funktioner) og samlede driftsomkostninger (inklusive træning, vedligeholdelse og software) er en barriere. Omkostningsparitet med menneskelig arbejdskraft nærmer sig for nogle lavtkvalificerede job, men er endnu ikke opnået universelt. De høje omkostninger ved humanoider er en barriere, men de samlede ejeromkostninger og værditilbuddet (inklusive faktorer som 24/7 drift, sikkerhed under farlige opgaver og håndtering af mangel på arbejdskraft) vil i sidste ende bestemme ROI. Det er ikke tilstrækkeligt udelukkende at fokusere på enhedsprisen. Selvom en robot til $100.000 kan virke dyr, kan dens økonomiske værdi være betydelig, hvis den kan erstatte flere menneskelige vagter, arbejde kontinuerligt, reducere fejl og udføre opgaver, som mennesker ikke kan eller ikke ønsker at udføre. ROI-beregningen skal være holistisk og tage højde for produktivitetsgevinster, reducerede lønomkostninger, forbedret sikkerhed og øget operationel fleksibilitet. Dette nuancerede perspektiv er afgørende for virksomheder, der overvejer at implementere den.
- Investeringsafkast (ROI): Det er en udfordring at demonstrere et klart og overbevisende investeringsafkast for virksomheder, især sammenlignet med eksisterende specialiseret automatisering eller menneskelig arbejdskraft. Lange testcyklusser i brancher som logistik (18-30 måneder) forsinker beslutningstagningen.
- Produktion og forsyningskæde: Opskalering af masseproduktionen af komplekse humanoide robotter støder på flaskehalse, såsom den begrænsede tilgængelighed af højpræcisionsskruer. Der er en afhængighed af specialiserede komponenter og globale forsyningskæder. Produktionsflaskehalse for specialiserede komponenter (f.eks. højpræcisionsskruer, aktuatorer) antyder, at selve den humanoide forsyningskæde kan blive et nøgleområde for investeringer og innovation. Dette kan potentielt føre til fremkomsten af nye specialiserede komponentproducenter eller vertikal integration fra førende robot-OEM'er. Masseproduktion af humanoide robotter kræver en pålidelig forsyning af mange specialiserede dele. Hvis eksisterende forsyningskæder til disse dele (f.eks. præcisionsskruer) ikke kan imødekomme den stigende efterspørgsel, vil dette begrænse den samlede humanoide produktion. Dette skaber en mulighed for nye virksomheder at komme ind på markedet som komponentleverandører, eller for store aktører som Tesla til vertikalt at integrere mere komponentproduktion for at sikre forsyning og kontrollere omkostninger.
- Integration i eksisterende arbejdsgange: Det er nødvendigt at tilpasse robotter til eksisterende menneskecentrerede miljøer og arbejdsgange uden større, omkostningsfulde ændringer.
- Offentlig accept og tillid: Samfundsmæssige bekymringer vedrørende jobtab, sikkerhed, databeskyttelse og den generelle tilstedeværelse af menneskelignende maskiner skal overvindes.
- Regulerings- og standardiseringshindringer: Der mangler klare, globalt harmoniserede regler og sikkerhedsstandarder for avancerede autonome humanoider.
Vigtige tekniske og kommercielle udfordringer inden for humanoid robotteknologi
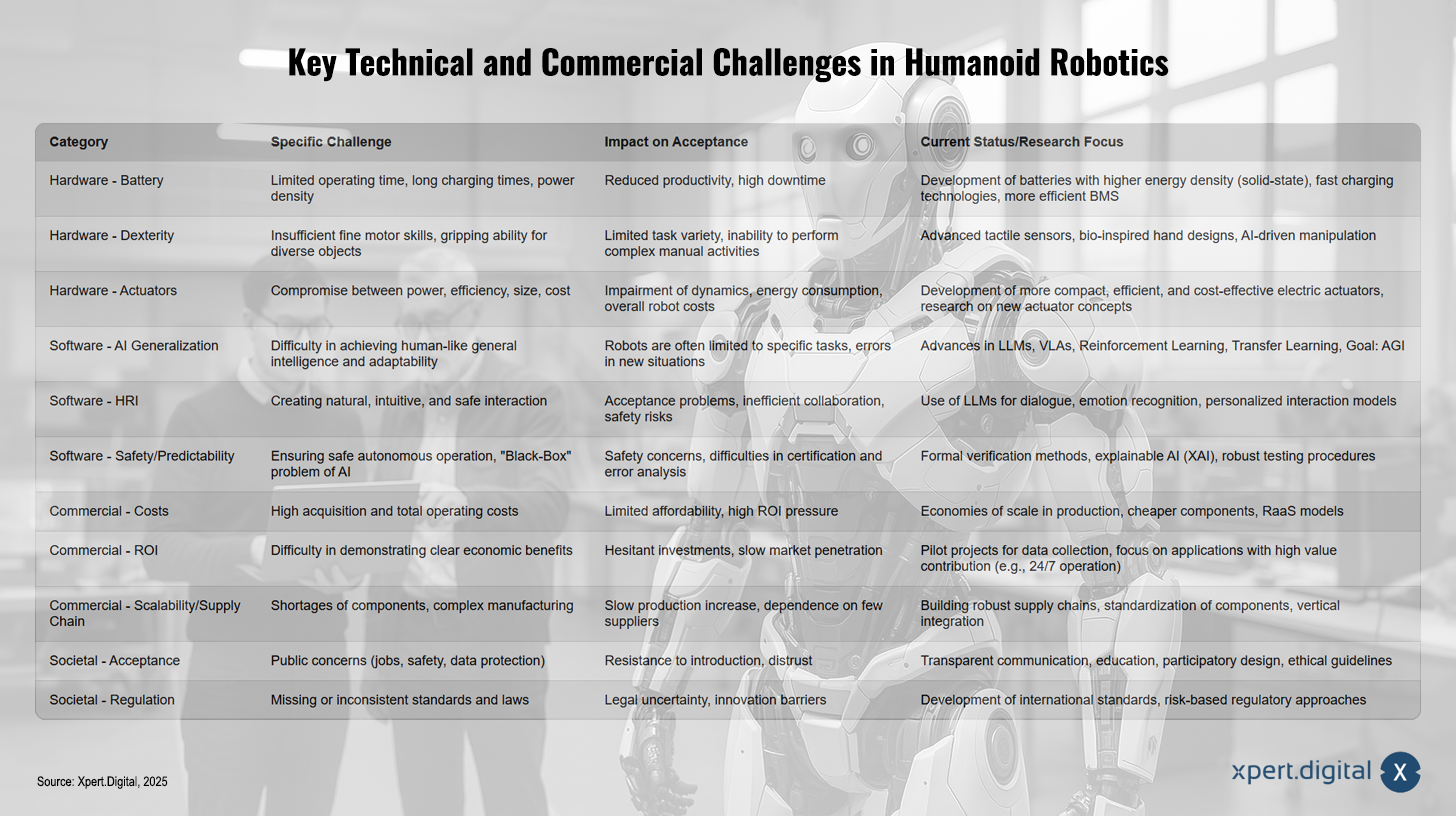
Vigtige tekniske og kommercielle udfordringer inden for humanoid robotteknologi – Billede: Xpert.Digital
Centrale tekniske og kommercielle udfordringer inden for humanoid robotteknologi omfatter forskellige kategorier, der hver især udgør specifikke problemer og påvirker teknologiens accept. Hardware-relaterede udfordringer omfatter begrænset batterilevetid og lange opladningstider, hvilket reducerer produktiviteten og fører til betydelig nedetid. Løsninger omfatter udvikling af batterier med højere energitæthed og hurtigopladningsteknologier. Et andet problem er utilstrækkelig finmotorik og gribeevne, hvilket begrænser udvalget af opgaver, der kan udføres. Fremskridt inden for taktile sensorer og bioinspirerede hånddesigns tilbyder potentielle løsninger her. Aktuatorer står også over for udfordringen med at balancere ydeevne, effektivitet, størrelse og omkostninger, hvilket påvirker dynamik og energiforbrug. Nye koncepter og mere kompakte aktuatorer er i øjeblikket under udvikling.
På softwaresiden ligger en central hindring i generaliseringen af kunstig intelligens (AI), da menneskelignende intelligens og tilpasningsevne er vanskelige at opnå. Manglende fleksibilitet begrænser robotter til specifikke opgaver. Fremskridt inden for områder som forstærkningslæring og transferlæring sigter mod at løse disse problemer. For at muliggøre naturlige, intuitive og sikre menneske-robot-interaktioner (HRI) fremmes brugen af AI-modeller, der styrer dialoger og genkender følelser. Samtidig er sikkerhed og forudsigelighed i autonome systemer et presserende problem, da det såkaldte "black box"-problem med AI skaber både sikkerhedsproblemer og certificeringsudfordringer. Forklarlig AI og robuste testmetoder er afgørende i denne henseende.
I den kommercielle sektor udgør høje anskaffelsesomkostninger og vanskeligheden ved at demonstrere et klart investeringsafkast (ROI) betydelige hindringer. Disse problemer hindrer investeringer og markedsindtrængning. Løsninger kan omfatte mere overkommelige komponenter, pilotprojekter til værdianalyse og Robotics-as-a-Service (RaaS)-modeller. Skalerbarheds- og forsyningskædeproblemer, forårsaget af flaskehalse i komponenter og komplekse fremstillingsprocesser, komplicerer hurtige produktionsstigninger. Robuste forsyningskæder og komponentstandardisering er centrale mål i denne sammenhæng.
Samfundsmæssige bekymringer vedrørende jobtab, sikkerhed og databeskyttelse påvirker offentlighedens accept. Gennemsigtig kommunikation, uddannelse og etiske retningslinjer kan bidrage til at reducere fordomme. Tilsvarende udgør manglen på eller inkonsekvent regulering et problem, der fører til juridisk usikkerhed og hæmmer innovation. Internationale standarder og risikobaserede reguleringstilgange er derfor nødvendige for at skabe juridiske rammer, der holder trit med den teknologiske udvikling.
Etiske, samfundsmæssige og ledelsesmæssige implikationer
Den løbende udvikling og stigende udbredelse af humanoide robotter rejser dybe etiske, samfundsmæssige og lovgivningsmæssige spørgsmål. Disse spænder fra indvirkningen på arbejdsmarkedet og sikkerhed til databeskyttelse, ansvarlighed og det grundlæggende forhold mellem mennesker og maskiner. Den etiske debat skifter i stigende grad fra, om vi kan bygge dem, til, hvordan vi skal integrere dem ansvarligt. Dette indebærer en voksende anerkendelse af deres forestående ankomst og behovet for proaktiv snarere end reaktiv styring. Tidligere etiske diskussioner var ofte spekulative. Med pilotprojekter og hurtige fremskridt inden for AI bliver spørgsmålene nu mere praktiske og presserende. Kilder som [kilde 1] og [kilde 2] diskuterer konkrete spørgsmål som ansvarlighed, bias og databeskyttelse i forbindelse med deployerbare systemer. Dette skift indikerer en modning af feltet og et samfundsmæssigt engagement med kortsigtede konsekvenser.
Centrale etiske bekymringer
- Jobforskydning og økonomisk indvirkning: Automatisering af opgaver, der tidligere blev udført af mennesker, kan føre til arbejdsløshed eller lønstagnation, især i lavtuddannede sektorer. Dette nødvendiggør omskolingsprogrammer og sociale sikkerhedsnet.
- Sikkerhed og tryghed: Den fysiske sikkerhed for mennesker, der interagerer med kraftfulde, autonome robotter, er af afgørende betydning. Dette forværres af cybersikkerhedsrisici og sårbarhed over for angreb.
- Privatliv og overvågning: Indsamling af data af robotter udstyret med avancerede sensorer (kameraer, mikrofoner) i hjem, på arbejdspladser og i offentlige rum giver anledning til betydelige bekymringer vedrørende databeskyttelse. Biometrisk sporing, ansigtsgenkendelse og bevægelsesanalyse er af særlig betydning.
- Autonomi, ansvar og ansvarlighed: Det er komplekst at fastslå ansvar, når autonome robotter forårsager skade eller begår fejl. Den "sorte boks"-karakter af AI-beslutningstagning komplicerer yderligere tingene.
- Bias: AI-systemer kan anvende og videreføre bias fra træningsdata, hvilket kan føre til urimelig eller diskriminerende behandling inden for områder som sundhedspleje eller beskæftigelse.
- Etik i menneske-robot-interaktion (HRI):
- Bedrag og antropomorfisme: Robotter, der virker menneskelignende eller viser følelser, kan vildlede brugerne eller skabe usunde tilknytninger.
- Følelsesmæssig afhængighed: Der er risiko for overdreven afhængighed af robotter som ledsagere eller til følelsesmæssig støtte, især blandt sårbare grupper (ældre, børn).
- Erstatning af menneskelig interaktion: Der er bekymring for, at robotter kan reducere reel menneskelig kontakt.
Udviklingen af etiske normer for humanoider vil sandsynligvis afspejle (og blive påvirket af) igangværende debatter inden for generel AI-etik, men med den ekstra kompleksitet af fysisk udførelse. Denne fysiske tilstedeværelse rejser direkte bekymringer om sikkerhed og menneskeligt ansvar, som ikke findes i rent softwarebaseret AI. Mange etiske principper for AI (bias, gennemsigtighed, ansvarlighed) gælder direkte for humanoider. Imidlertid introducerer en humanoids fysiske tilstedeværelse og evne til at interagere i verden unikke risici (fysisk skade) og interaktionsdynamik (følelsesmæssig binding). Derfor kræver etikken bag humanoide robotter et specialiseret fokus, der bygger på, men også udvider, generel AI-etik.
Oversigt over etiske og samfundsmæssige bekymringer inden for humanoid robotteknologi
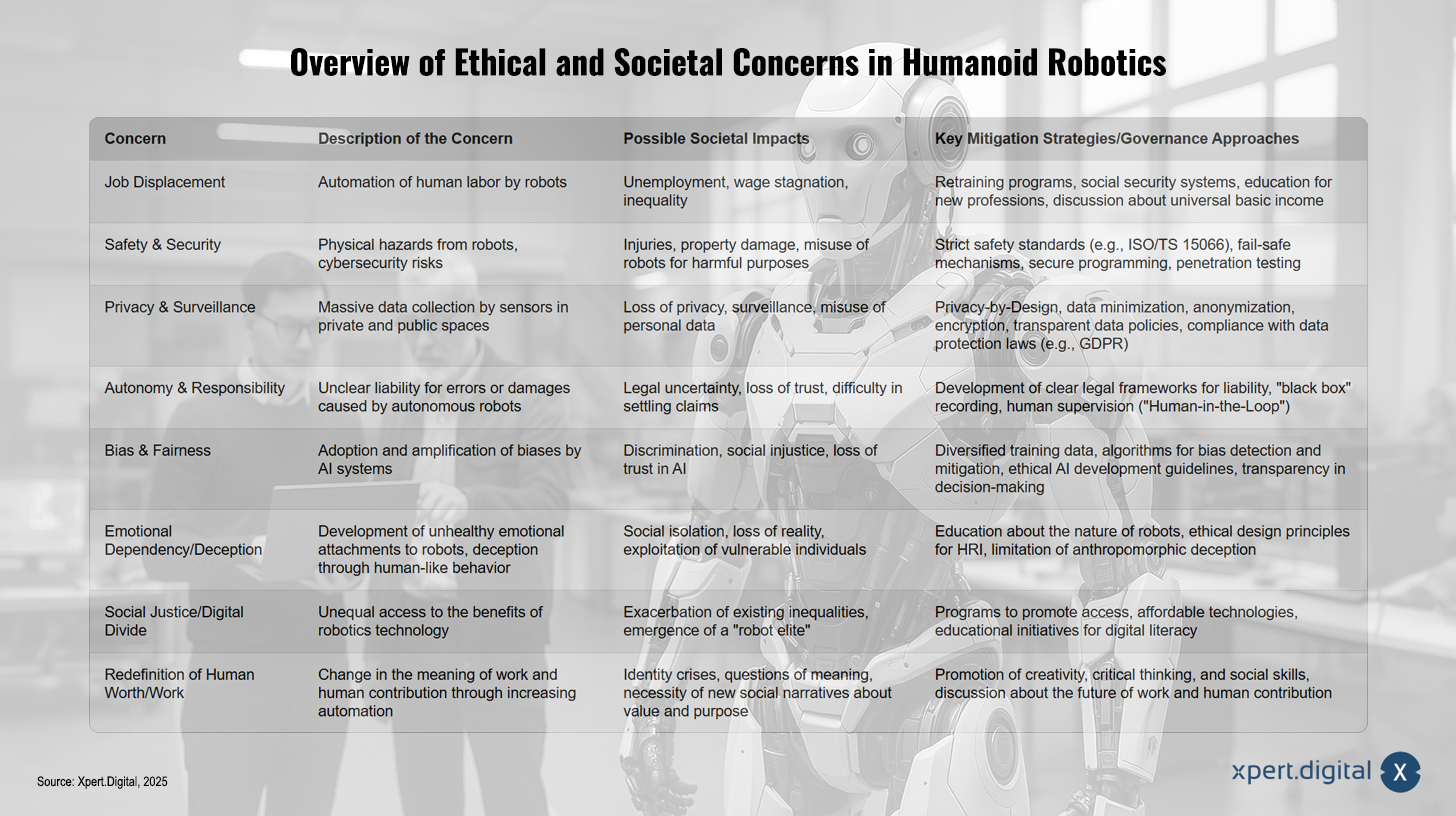
Oversigt over etiske og samfundsmæssige bekymringer inden for humanoid robotteknologi – Billede: Xpert.Digital
De etiske og samfundsmæssige bekymringer omkring humanoid robotteknologi kan opdeles i flere kategorier. Et centralt aspekt er den potentielle jobforskydning, der kan følge af automatisering af menneskeligt arbejde af robotter. Dette kan føre til arbejdsløshed, lønstagnation og stigende ulighed. De foreslåede modforanstaltninger omfatter omskolingsprogrammer, sociale sikkerhedsnet, uddannelsesinitiativer for nye erhverv og diskussioner om en universel basisindkomst. En anden bekymring er sikkerhed, da robotter kan udgøre fysiske farer eller misbruges gennem cybersikkerhedsrisici. For at forhindre skader, materielle skader eller skadelig brug er strenge sikkerhedsstandarder, fejlsikre mekanismer, sikker programmering og omfattende penetrationstest nødvendige.
Spørgsmål om privatliv og overvågning vinder frem i betydning på grund af den massive dataindsamling fra robotsensorer, da dette medfører tab af privatlivets fred og risiko for misbrug af personoplysninger. Beskyttelsesforanstaltninger omfatter indbygget privatlivsbeskyttelse, dataminimering, anonymisering, kryptering, transparente datapolitikker og overholdelse af databeskyttelseslove såsom GDPR. Autonome robotters autonomi og ansvar rejser spørgsmål om ansvar i tilfælde af fejl eller skader, hvilket kan føre til juridisk usikkerhed, tab af tillid og vanskeligheder med skadesbehandling. Klare juridiske rammer, "black box"-optagelser og menneskeligt tilsyn – også kendt som "human-in-the-loop" – er afgørende.
Derudover er der bekymringer vedrørende bias og retfærdighed, da AI-systemer kan anvende og forstærke fordomme, hvilket potentielt kan føre til diskrimination og social uretfærdighed. Strategier, der adresserer disse, omfatter diversificerede træningsdata, dedikerede algoritmer til biasdetektion og -afbødning, etiske retningslinjer for AI-udvikling og gennemsigtighed i beslutningstagningen. Følelsesmæssig afhængighed eller bedrag fra robotter udgør også et problem, især hvis de vildleder folk gennem menneskelignende adfærd og fremmer følelsesmæssige tilknytninger. At øge bevidstheden om robotters sande natur, etablere etiske designprincipper i menneske-robot-interaktion (HRI) og begrænse antropomorfe bedragsstrategier er afgørende i denne sammenhæng.
Yderligere samfundsmæssige konsekvenser vedrører social retfærdighed og den digitale kløft, da ulige adgang til robotbaserede teknologier kan forværre eksisterende uligheder og skabe en "robotelite". Uddannelsesinitiativer, der fremmer digital læsefærdighed, programmer til at fremme adgang og overkommelige teknologier, er passende modforanstaltninger. Endelig er fremskridt i automatisering placeret i en kontekst af en omdefinering af menneskelig værdi og arbejde. Dette kan udløse identitetskriser og spørgsmål om mening, samtidig med at nye samfundsmæssige fortællinger om værdien og formålet med menneskelig aktivitet bliver nødvendige. At fremme kreativitet, kritisk tænkning og sociale færdigheder samt at fremme en åben diskussion om fremtidens arbejde er vigtige tilgange til at imødegå disse udfordringer.
Samfundsmæssig påvirkning
- Fremtidens arbejde: Integrationen af humanoide robotter vil føre til en transformation af jobroller, skabe nye erhverv (f.eks. robotvedligeholdelse, AI-programmering, etikmedarbejdere) og understrege behovet for livslang læring. Samtidig giver det potentiale for betydelige produktivitetsgevinster og økonomisk vækst.
- Social retfærdighed og tilgængelighed: Der er risiko for at forværre den digitale kløft, hvis adgangen til gavnlige robotteknologier er ulige fordelt. Samtidig tilbyder robotter potentiale til at forbedre tilgængeligheden for mennesker med handicap. Et potentielt paradoks er ved at opstå: Mens humanoider udvikles for at afhjælpe mangel på arbejdskraft og overtage uønskede opgaver, kan deres udbredte anvendelse skabe nye former for social lagdeling baseret på adgang til og kontrol over disse teknologier. Dette kan forværre den digitale kløft, hvis den ikke forvaltes retfærdigt. Humanoider lover at udfylde arbejdskløfter, men deres udvikling og implementering kræver betydelig kapital og ekspertise. Hvis adgangen til disse produktivitetsfremmende værktøjer forbliver begrænset til velhavende nationer eller store virksomheder, kan det forværre økonomiske uligheder globalt og inden for samfund. At bygge bro over den digitale kløft bliver endnu mere kritisk i den avancerede robotteknologis tidsalder.
- Offentlig opfattelse og tillid: Opbygning af offentlig tillid er afgørende for accept. Gennemsigtighed i databrug, klar kommunikation og håndtering af sikkerheds- og privatlivshensyn er afgørende for dette. Kulturelle forskelle i forventninger til HRI og accept af robotter spiller også en rolle.
- Omdefinering af menneskelig værdi og formål: Efterhånden som robotter påtager sig flere opgaver, vil samfundsmæssige diskussioner om værdien af menneskeligt arbejde, kreativitet og sociale relationer intensiveres.
Styring og regulering
Robuste juridiske og etiske rammer er nødvendige for at vejlede udviklingen og implementeringen af humanoide robotter. Eksisterende internationale sikkerhedsstandarder (f.eks. ISO/TS 15066 for kollaborative robotter) skal videreudvikles for avancerede humanoide robotter. Principper som gennemsigtighed, retfærdighed, ansvarlighed, menneskeligt tilsyn og princippet om ikke-skadelighed er afgørende. Privacy-by-design-principper og databeskyttelsesregler (f.eks. GDPR) er relevante. Det er udfordrende at skabe globalt harmoniserede regler på grund af forskellige kulturelle værdier og prioriteter. EU's AI-lov fungerer som et eksempel på risikobaseret regulering.
Fra fabriksgulv til stue: Humanoider i skiftende anvendelsesområder – Køreplan (2025-2035 og fremover)
De kommende år og årtier lover en kontinuerlig og accelereret udvikling inden for humanoid robotteknologi, drevet af teknologiske gennembrud og voksende markedsaccept. Køreplanen for udbredt anvendelse er dog ikke lineær, men vil sandsynligvis involvere cyklusser af hype, desillusionering og i sidste ende produktivitet (analogt med Gartners hypecyklus). Forskellige applikationer vil modnes i forskellige hastigheder. Tidlige succeser i strukturerede industrielle miljøer vil være afgørende for at sikre finansiering og vedvarende forskning og udvikling til mere komplekse, ustrukturerede applikationer. Gartner placerer i øjeblikket humanoider som "innovationsudløser", og Forrester bemærker deres hurtige stigning i betydning. Historisk teknologiadoption følger ofte sådanne cyklusser. Indledende industrielle implementeringer (bilindustrien, logistik) vil give afgørende validering og indtægter. Hvis disse tidlige applikationer opfylder ROI-forventningerne, vil dette drive yderligere investeringer, der er nødvendige for at adressere de mere udfordrende hjemlige eller meget interaktive miljøer, der ligger længere nede i tidsrammen.
Næste generations teknologier
- Sensorer: Der forventes løbende fremskridt inden for visuelle systemer (højere opløsning, bedre AI-behandling), taktile sensorer (større følsomhed, holdbarhed, omkostningseffektivitet) og proprioception. Multimodal sensorfusion vil spille en nøglerolle.
- Aktuatorer: Der udvikles mere energieffektive, kompakte og responsive elektriske aktuatorer. Potentielle gennembrud inden for bløde robotaktuatorer kan føre til mere kompatible og sikrere HRI'er.
- Materialer: Lettere, stærkere og mere holdbare materialer er under udvikling. Selvreparerende materialer og materialer med indlejrede sensorfunktioner er også i fokus.
- Energisystemer: Batterier med højere energitæthed (f.eks. solid-state-batterier), hurtigere opladningstider og forbedrede batteristyringssystemer (BMS) er afgørende for længere driftstider og øget sikkerhed.
- AI og generel intelligens: Fremskridt inden for kunstig generel intelligens (AGI) vil gøre det muligt for robotter at lære mere komplekse opgaver med færre data, tænke abstrakt, forstå kontekster dybt og demonstrere sund fornuft. Virtuelle læringsområder (VLA'er) og multimodale modeller vil blive mere sofistikerede. Den langsigtede vision for AGI i humanoider vil kræve en fundamental gentænkning af forholdet mellem mennesker og AI og potentielt føre til nye former for samarbejde, medafhængighed og endda samfundsstrukturer, der er vanskelige at forudsige fra nutidens perspektiv. AGI indebærer robotter med menneskelignende læring og ræsonnement. Når humanoider opnår dette, vil de blive mere end blot værktøjer; de vil blive partnere eller endda autonome agenter. Dette rejser dybe spørgsmål om deres rolle i samfundet, deres beslutningsmyndighed og karakteren af "arbejde" og "intelligens". De nødvendige samfundsmæssige tilpasninger ville være langt mere omfattende end dem, der gælder for nuværende snævre AI-applikationer.
Forventede milepæle og tidslinjer for udrulningen
- Kort sigt (2025-2027):
- Pilotprojekter er stigende i bil- og logistikindustrien. Tesla og BYD planlægger at implementere tusindvis af enheder i 2025-2026.
- Første kommercielle lancering til specifikke, klart definerede opgaver i disse sektorer.
- Fokus på at forbedre pålideligheden, reducere omkostningerne og demonstrere et klart investeringsafkast i industrielle miljøer.
- Brugen af humanoider inden for logistik forventes at tage fart i 2026-2027.
- Mellemlang sigt (2028-2033):
- Udvidelse til mere komplekse opgaver i industrielle miljøer.
- Bredere accept i andre kommercielle servicemiljøer (detailhandel, hotel- og restaurationsbranchen) og specialiserede roller inden for sundhedsvæsenet.
- Modning af RaaS-modeller, hvilket øger tilgængeligheden.
- Betydelige forbedringer i fingerfærdighed, batterilevetid og AI-funktioner.
- Mulighed for begrænset, overvåget brug i hjemmet/personlig assistance til specifikke opgaver.
- Langsigtet (2034-2040+):
- Udbredt anvendelse i adskillige brancher og potentielt i private husholdninger til generelle hjælpeopgaver.
- Humanoide robotter, der er i stand til at træffe mere autonome beslutninger og operere i meget ustrukturerede miljøer.
- Tættere integration i det menneskelige samfund, hvilket potentielt kan føre til betydelige forandringer af arbejdsmarkedet og en omdefinering af arbejde.
- Morgan Stanley forudsiger 8 millioner arbejdende humanoider i USA inden 2040 og 63 millioner inden 2050.
Transformativt potentiale og langsigtet vision
Humanoide robotter ses som universelle værktøjer, der kan forbedre menneskelige evner i næsten alle sektorer. De har potentiale til at imødegå store samfundsmæssige udfordringer såsom mangel på arbejdskraft, aldrende befolkninger og farligt arbejde samt til at forbedre livskvaliteten. Mange ser "iPhone-øjeblikket" for robotteknologi som ankommet, hvilket fører til masseadoption og en ny æra af menneske-maskine-samarbejde. Det økonomiske potentiale er enormt med udsigt til øget produktivitet og BNP-vækst. Den langsigtede vision omfatter robotter, der er problemfrit integreret i hverdagen, udfører en bred vifte af opgaver og interagerer naturligt med mennesker. Udviklingen af "generelle humanoider" er jagten på en "universel fysisk grænseflade". Hvis det opnås, kan dette kommercialisere mange former for fysisk arbejde og specialiseret robothardware, ligesom generelle computere har kommercialiseret specialiserede computermaskiner. Målet er en robot, der er i stand til at udføre mange opgaver. Hvis en enkelt humanoid platform, gennem avanceret AI og tilpasningsdygtig hardware, kan udføre opgaver, der i øjeblikket kræver flere specialiserede robotter eller menneskelige arbejdere, repræsenterer dette et paradigmeskift. Denne "universalitet" kan føre til stordriftsfordele i produktionen og reducere behovet for forskellige typer specialiseret automatiseringsudstyr betydeligt, hvilket fundamentalt transformerer robotmarkedet og arbejdsøkonomien.
Relateret til dette:

Fra science fiction til virkelighed: Æraen med menneskelignende robotter begynder
Humanoid robotteknologi er på et afgørende tidspunkt i sin udvikling. Drevet af betydelige fremskridt inden for kunstig intelligens, forbedrede hardwarekomponenter og en stigende markedsefterspørgsel, udvikler disse humanoide maskiner sig fra blotte forskningsobjekter til håndgribelige løsninger på virkelige problemer inden for industri, sundhedsvæsen og andre områder. Visionen om robotter, der problemfrit samarbejder med mennesker og udfører opgaver i menneskeskabte miljøer, nærmer sig virkeligheden.
Analysen har vist, at det teknologiske grundlag, især inden for områderne aktuatorer, sensorer, strømforsyning og AI-baseret styring, udvikler sig hurtigt. Samtidig udgør kompleksiteten ved at replikere menneskelig fingerfærdighed og intelligens, de høje omkostninger, produktionens skalerbarhed og sikring af sikkerhed og pålidelighed fortsat betydelige udfordringer. Markedet udviser et enormt vækstpotentiale, som det fremgår af adskillige prognoser, men hastigheden af den udbredte kommercielle implementering vil afhænge af, hvor effektivt disse forhindringer overvindes.
De etiske og samfundsmæssige implikationer er dybtgående og kræver proaktivt engagement. Spørgsmål om jobforskydning, databeskyttelse, ansvar og sikkerhed skal tages op, såvel som de mere subtile aspekter af interaktion mellem menneske og robot og offentlig accept. Ansvarlig innovation baseret på bredt samarbejde mellem industri, akademia, regering og offentligheden, sammen med fremsynet forvaltning, er afgørende for at sikre, at udviklingen og implementeringen af humanoide robotter tjener det fælles bedste.
Kort sagt har humanoide robotter potentiale til at transformere arbejde, samfund og dagligdag i de kommende årtier. Selvom vejen fra science fiction til hverdagens virkelighed stadig er fyldt med udfordringer, er fremskridtene ubestridelige. En vellykket integration af disse teknologier vil kræve en balance mellem teknologisk ambition, økonomisk levedygtighed og etisk ansvarlighed. De kommende år vil være afgørende for at afgøre, om og hvordan dette transformative potentiale kan realiseres fuldt ud, hvor overgangen fra specialiserede applikationer til mere generelle funktioner repræsenterer en vigtig milepæl.
Vi er her for dig - Rådgivning - Planlægning - Implementering - Projektledelse
☑️ SMV-support inden for strategi, rådgivning, planlægning og implementering
☑️ Oprettelse eller omlægning af den digitale strategi og digitalisering
☑️ Udvidelse og optimering af internationale salgsprocesser
☑️ Globale og digitale B2B-handelsplatforme
☑️ Pioner inden for forretningsudvikling

Konrad Wolfenstein
Jeg vil med glæde fungere som din personlige rådgiver.
Du kan kontakte mig ved at udfylde kontaktformularen nedenfor eller blot ringe til mig på +49 89 89 674 804 (München) .
Jeg glæder mig til vores fælles projekt.
Skriv til mig

Xpert.Digital - Konrad Wolfenstein
Xpert.Digital er et knudepunkt for industrien med fokus på digitalisering, maskinteknik, logistik/intralogistik og solceller.
Med vores 360° forretningsudviklingsløsning understøtter vi anerkendte virksomheder fra nye forretninger til eftersalg.
Markedsinformation, smarketing, marketingautomatisering, indholdsudvikling, PR, postkampagner, personlige sociale medier og lead nurturing er en del af vores digitale værktøjer.
Du kan finde mere information på: www.xpert.digital - www.xpert.solar - www.xpert.plus
Hold kontakten


















