
För närvarande den största humanoida robotstudien av Xpert.Digital – marknadsboom framöver: Från robotprototyper till praktisk tillämpning
Xpert-förhandsversion

Available in 27 languages 📢
Föredra Xpert.Digital på GoogleⓘPublicerad den: 13 maj 2025 / Uppdaterad den: 13 maj 2025 – Författare: Konrad Wolfenstein

För närvarande den största humanoida robotstudien av Xpert.Digital – marknadsboom framöver: Från robotprototyper till praktisk tillämpning – Bild: Xpert.Digital
Humanoid robotik: Nyckeln till en ny industriell revolution? (Lästid: 52 min / Ingen reklam / Ingen betalvägg)
För ledningen: Att övervinna obalans – Varför integrerade strategier banar väg för robotar
Humanoid robotik befinner sig vid en vändpunkt och övergår från forskningsprototyper till initiala kommersiella implementeringar, särskilt i industriella miljöer. Denna snabba utveckling drivs till stor del av framsteg inom artificiell intelligens (AI), särskilt förkroppsligad AI, stora språkmodeller (LLM) och vision-språk-handlingsmodeller (VLA), samt av hårdvaruinnovationer. Marknadsprognoser indikerar betydande tillväxt, med uppskattningar från 30 miljarder dollar till över 200 miljarder dollar år 2035. Tillämpningsområdena är mångsidiga och sträcker sig från industri och hälso- och sjukvård till personliga assistanssystem. Trots den enorma potentialen kvarstår betydande utmaningar inom områden som batteriteknik, manuell fingerfärdighet, kostnadseffektivitet, skalbarhet och etisk styrning. Konvergensen av fallande hårdvarukostnader, förbättrad AI och ökande arbetskraftsbrist skapar ett slags "perfekt storm" som gynnar ett accelererat införande av humanoida robotar. Detta kan leda till snabbare avkastning på investeringen (ROI) i riktade industriella applikationer än vad som förutspås av vissa konservativa uppskattningar, vilket i sin tur skulle resultera i snabbare implementeringscykler inom dessa nischer. Företag kommer att ha allt större incitament att implementera automatiseringslösningar, och humanoida robotar erbjuder, tack vare sin mångsidighet, en anpassningsbar lösning för människocentrerade miljöer.
Det dubbla fokuset på att utveckla generell AI och högspecialiserade hårdvarukomponenter (ställdon, sensorer) leder till ett komplext samspel. Framsteg inom ett område kan hämmas av flaskhalsar inom det andra, vilket tyder på att holistiska, integrerade utvecklingsstrategier kommer att vara avgörande för marknadsledare. Till exempel kan sofistikerad AI inte helt kompensera för otillräcklig mekanisk fingerfärdighet eller begränsad driftstid på grund av batteribrist. Omvänt kan avancerad hårdvara inte nå sin fulla potential utan tillräckligt intelligent programvara. Företag som kan utveckla hårdvara och AI tillsammans, som är fallet med Teslas vertikala integrationsmetod, skulle därför kunna ha en konkurrensfördel.
Detta årtionde (2025-2035) lovar att inleda en omvälvande era för humanoida robotar, vilka har potential att djupt förändra arbete, samhälle och vardagsliv.
Relaterat till detta:

Teknologiska genombrott: Hur humanoida robotar förändrar våra liv
Humanoid robotik har framstått som ett av de mest dynamiska och potentiellt transformerande teknikområdena under 2000-talet. I skärningspunkten mellan artificiell intelligens, avancerad mekanik, elektronik och materialvetenskap lovar humanoida robotar att fundamentalt förändra hur människor arbetar, interagerar och lever. Denna studie ger en omfattande analys av det nuvarande läget, den historiska utvecklingen, de tekniska grunderna, de olika tillämpningarna, marknadslandskapet, de viktigaste utmaningarna och framtida utvecklingsutsikterna för humanoida robotar, med särskilt fokus på perioden fram till 2025 och framåt.
Definition av en humanoid robot
En humanoid robot är per definition en robot vars yttre form liknar människokroppen och vanligtvis har en torso, ett huvud, två armar och två ben. Denna människoliknande form är inte bara ett estetiskt drag utan tjänar ofta funktionella syften, såsom att interagera med verktyg och miljöer designade för människor, eller experimentella syften, till exempel forskning om tvåbent rörelse.
Akademiska definitioner går utöver enbart fysisk likhet och betonar att humanoida robotar är noggrant konstruerade för att inte bara efterlikna mänskligt utseende utan även mänskligt beteende. Detta inkluderar att replikera funktioner som perception, beslutsfattande och interaktion. På grund av sin antropomorfa design erbjuder de inneboende fördelar i människocentrerade miljöer, vilket möjliggör mer naturlig interaktion och större anpassningsförmåga än andra former av robotar. Förmågan att röra sig inom människodesignade utrymmen och använda verktyg designade för människor är en central aspekt av deras funktionalitet och växande användbarhet.
Själva definitionen av "humanoid" är föremål för evolution. Ursprungligen låg fokus starkt på fysisk form. Men nyare akademiska överväganden och tekniska framsteg flyttar alltmer detta fokus till att härma beteende och kognitiva funktioner. Denna utveckling drivs i hög grad av framsteg inom artificiell intelligens. Även om humanoida robotar inte bara ser mänskliga ut utan också i allt högre grad "agerar" och "resonerar" på ett människoliknande sätt, sänker detta interaktionsbarriärer men väcker samtidigt djupare etiska frågor kring bedrägeri, emotionell bindning och intelligensens natur.
Studiens betydelse och omfattning
Humanoid robotik representerar en kritisk teknologisk frontlinje och förkroppsligar konvergensen av olika vetenskapliga och tekniska discipliner. Dess potential att revolutionera industrier, åtgärda arbetskraftsbrist, hjälpa till med farliga uppgifter och förbättra vardagen är enorm. Det "funktionella syftet" med humanoid design – interaktion med mänskliga verktyg och miljöer – framträder som en primär ekonomisk drivkraft. Denna anpassningsförmåga innebär att företag kan integrera humanoida robotar i befintliga arbetsflöden med mindre störningar och kapitalutgifter än vad som skulle krävas för att omgestalta fabriker eller lager för specialiserade robotar. Denna inneboende fördel är ett kraftfullt försäljningsargument, vilket demonstrerats av pilotprogram inom fordons- och logistikindustrin, och fungerar som en stark katalysator för implementering.
Denna studie syftar till att ge en omfattande analys av det nuvarande läget (runt 2025), historiska sammanhang, tekniska grunder, tillämpningar, marknadslandskap, utmaningar och framtida utvecklingsvägar för humanoid robotik. Den är avsedd att fungera som en gedigen resurs för forskare, utvecklare, beslutsfattare, investerare och allmänheten för att förstå komplexiteten och de långtgående konsekvenserna av denna framväxande teknik.
Historisk utveckling av humanoidrobotik
Fascinationen för artificiella varelser som liknar människor sträcker sig långt tillbaka i historien och har i hög grad format utvecklingen av humanoida robotar. Från forntida myter till dagens mycket avancerade maskiner spänner den mänskliga strävan att replikera intelligens och rörelse i en människoliknande form över ett brett spektrum.
Tidiga koncept och automater
Idén om människoliknande artificiella varelser kan hittas i forntida myter som Hefaistos, som skapade mekaniska tjänare, eller Pygmalion, vars staty kom till liv. Tidiga mekaniska konstruktioner, så kallade automater, vittnar om detta tidiga intresse. Exempel inkluderar egyptiska vattenklockor med rörliga mänskliga figurer som slog timmarna, de mekaniska fåglarna och hästarna av den kinesiske ingenjören kung Shu Tse (ca 400 f.Kr.), och de programmerbara musikaliska automaterna av Al-Jazari på 1100-talet. Leonardo da Vincis skisser av en mekanisk riddare från slutet av 1400-talet, kapabel att röra armar, huvud och käke, tillhör också denna serie av tidiga koncept. Dessa tidiga exempel visar på en långvarig mänsklig fascination för skapandet av artificiella varelser och lade den konceptuella grunden för senare utvecklingar.
Historiska milstolpar inom robotutveckling (före 1970 och viktiga teoretiska/tidiga praktiska steg under 1900-talet)

Historiska milstolpar inom robotutveckling (före 1970 och viktiga teoretiska/tidiga praktiska steg under 1900-talet) – Bild: Xpert.Digital
Den historiska utvecklingen av robotteknik före 1970 kännetecknas av många milstolpar och teoretiska framsteg. Redan 3500 f.Kr. beskrev myterna om Hefaistos och Pygmalion i grekisk mytologi tidiga koncept om intelligenta mekanismer och artificiella varelser. Omkring 1500 f.Kr. utvecklade egyptierna vattenklockor med människoliknande figurer, vilket representerade de första stegen mot mekanisk automatisering. År 1206 e.Kr. konstruerade Ismail al-Jazari en tidig form av programmerbar människoliknande robot med sin Musikerbåt. År 1495 e.Kr. skissade Leonardo da Vinci en mekanisk riddare som kunde sitta ner och röra sitt huvud och sina armar. År 1769 utvecklade Wolfgang von Kempelen den "mekaniska turken", en människoliknande automat som kunde spela schack, även om den kontrollerades av en dold människa.
Åren 1920/1921 introducerade Karel Čapek termen "robot" i sin pjäs "RUR", inspirerad av det tjeckiska ordet "robota", som översätts till "tvångsarbete". Vid världsutställningen 1939 presenterade Westinghouse Electric roboten "Elektro", som kunde tala och svara på kommandon. På 1940-talet utvecklade George Devol industriroboten "Unimate", som revolutionerade industriproduktionen genom att automatisera repetitiva uppgifter. År 1942 formulerade Isaac Asimov de välkända "Robotteknikens tre lagar" i sina science fiction-berättelser, vilket gav etiska riktlinjer för att interagera med robotar.
År 1948 publicerade Norbert Wiener sitt banbrytande verk "Cybernetik", som behandlade kontroll och kommunikation i maskiner och levande varelser, och därmed avsevärt påverkade utvecklingen av robotik. Samma år skapade William Grey Walter de autonoma robotarna "Elmer" och "Elsie", som kunde reagera på miljöförändringar. Slutligen, år 1950, introducerade Alan Turing Turingtestet, ett koncept utformat för att bedöma en maskins förmåga att uppvisa intelligent beteende som inte kan skiljas från en människas.
1900-talet: Den moderna robotikens gryning
1900-talet markerade början på modern robotik, kännetecknad av teoretiska grunder och inledande praktiska tillämpningar. Termen "robot" myntades 1920/1921 av Karel Čapek i hans pjäs "RUR (Rossums universella robot)", härledd från det tjeckiska ordet "robota", som betyder tvångsarbete. En tidigare välkänd humanoid robot var "Electro", som presenterades av Westinghouse på världsutställningen i New York 1939, kapabel att svara på röstkommandon och tala enkla meningar. Isaac Asimov bidrog betydande till den etiska diskussionen med sina "Robotikens tre lagar" (1942) och populariserade termen "robotik" som robotvetenskapen. Samtidigt lade pionjärer som Norbert Wiener med sitt arbete om cybernetik (1948) och William Grey Walter med sina tidiga autonoma robotar (1948) viktiga teoretiska och praktiska grunder. Alan Turings publicering av Turingtestet (1950) gav ett konceptuellt ramverk för att utvärdera maskinintelligens. Även om den inte var en människoliknande robot, var utvecklingen av den första industriroboten, Unimate, av George Devol på 1940- till 1960-talen ett avgörande steg inom automationstekniken och revolutionerade industriell tillverkning. Denna period präglades av en intensiv litterär och vetenskaplig debatt om robotteknikens sociala, etiska och tekniska utmaningar.
Viktiga milstolpar efter 1970: Uppkomsten av funktionella humanoider
Efter 1970 började eran av funktionella humanoida robotar, som kunde utföra alltmer komplexa uppgifter.
- WABOT-1 (1972-1973, Wasedauniversitetet): Denna robot anses vara världens första fullt fungerande, intelligenta humanoida robot. Utvecklad med målet att skapa en "personlig robot" kunde WABOT-1 gå, kommunicera med en person på japanska, mäta avstånd och riktningar till föremål med hjälp av konstgjorda ögon och öron, samt gripa och bära föremål med händerna.
- WABOT-2 (1984, Waseda University): WABOT-2, designad som en "speciell robot", var en människoliknande musiker som kunde läsa noter och spela på en elektronisk orgel.
- Honda E-serien (1986-1993) och P-serien (1993-1997): Honda var pionjärer inom tvåbent förflyttning. E-serien tjänade grundforskning, medan P-serien ledde till mer avancerade prototyper. P2 (1996) var den första självreglerande, tvåbenta roboten, och P3 (1997) var den första helt oberoende tvåbenta humanoida roboten som kunde gå utan externa kablar.
- ASIMO (2000, Honda): Som Hondas elfte tvåfota humanoidrobot kunde ASIMO köra, interagera och utföra semiautonoma uppgifter. En förbättrad version introducerades 2011. ASIMO invaldes i Robot Hall of Fame 2004. Utvecklingen avbröts 2018 och ASIMO pensionerades officiellt 2022. Avslutandet av projekt som ASIMO signalerar inte nödvändigtvis ett misslyckande, utan ofta en strategisk omställning mot mer praktiska eller ekonomiskt hållbara tillämpningar. Detta återspeglar en marknadsmognad där forsknings- och utvecklingsinvesteringar i allt högre grad måste anpassas till specifika marknadsbehov och lönsamhet.
- HRP-serien (Japan, AIST/Kawada): Humanoid Robotics Project (HRP) började med modifierade Honda P3-robotar och vidareutvecklade dem. HRP-2 (2002) var en tvåbent gångrobot. HRP-4C "Miim" (2009) var en kvinnligt designad robot som kunde sjunga och dansa.
- Actroid (2003, Osaka University/Kokoro): Denna robot kännetecknades av en realistisk silikonhud och fokuserade på ett människoliknande utseende.
- HUBO (2005, KAIST): Var Sydkoreas första vandrande humanoida robot.
- Nao (2006, Aldebaran Robotics/SoftBank): En liten, programmerbar humanoid robot med öppen källkod som har funnit stor användning inom forskning och undervisning.
- Atlas (2013–nutid, Boston Dynamics): Ursprungligen utvecklad för DARPA Robotics Challenge, är Atlas en mycket dynamisk humanoid robot som kan utföra komplexa rörelser som att gå, springa, hoppa och bakåtvolter. En helt elektrisk version med förbättrad fingerfärdighet presenterades i april 2024. DARPA Robotics Challenge fungerade som en viktig katalysator, tänjde på gränserna för humanoida förmågor i katastrofscenarier och främjade innovationer som nu hittar sin väg till kommersiella produkter. Den avancerade rörligheten och robustheten som utvecklats för dessa utmaningar är nu kännetecken för kommersiella eller nära produktionsstartade robotar.
- Valkyrie (2013, NASA): Valkyrie utvecklades också för DARPA Robotics Challenge och var designad för användning i skadade, konstgjorda miljöer. Den har potential för rymduppdrag.
- Nyligen noterade utvecklingar (efter 2020):
- Ameca (Engineered Arts, 2022): Känd för sitt extremt uttrycksfulla ansikte.
- Optimus (Tesla, 2022): En universell humanoid designad för användning inom tillverkning och potentiellt i hemmet.
- Unitree G1 (2024): En relativt billig humanoid robot.
- Figur 01/02 (Figur AI): Humanoider för allmänt bruk testas redan i industriella pilotprojekt.
Den historiska utvecklingen visar ett tydligt skifte från universitetsledd grundforskning (t.ex. Waseda, Hondas tidiga arbete) till kommersiellt driven utveckling med specifika tillämpningsmål (t.ex. Teslas Optimus för tillverkning, Agilitys Digit för logistik). Detta indikerar områdets ökande mognad och dess växande ekonomiska lönsamhet.
Kärntekniker och komponenter
Humanoida robotars kapacitet baseras på ett komplext samspel mellan olika kärnteknologier och komponenter. Dessa sträcker sig från mekaniska system som ger rörelse och struktur, till avancerade sensorer för att uppfatta omgivningen, och sofistikerade programvaru- och AI-arkitekturer som möjliggör kontroll, inlärning och interaktion. Utveckling inom vart och ett av dessa områden är avgörande för utvecklingen av humanoida robotar som helhet.
Mekaniska system
De mekaniska systemen utgör den fysiska grunden för humanoida robotar och inkluderar ställdon för rörelse, material för struktur och energisystem för drift.
Ställdon
Aktuatorer är de motorer som ansvarar för rörelsen i en robot och imiterar funktionen hos mänskliga muskler och leder. Ideala aktuatorer bör ha hög effekttäthet, låg massa och små dimensioner.
- Elektriska ställdon: Dessa är den vanligaste typen och vanligtvis mindre. För leder av mänsklig storlek kan dock flera elektriska ställdon per led krävas för att generera tillräcklig kraft (t.ex. HRP-2). Framsteg inom permanentmagneter (t.ex. neodym-järn-bor) har avsevärt ökat effekttätheten hos elmotorer, vilket minskar gapet till hydrauliska system. Elektriska ställdon kännetecknas av hög effektivitet (75–80 %), färre komponenter och lägre underhållskrav jämfört med hydrauliska system. Trenden mot elektriska ställdon, även i mycket dynamiska robotar som den nya Atlas, signalerar en marknadsmognad inriktad på kommersiell lönsamhet (effektivitet, underhåll, kostnad) snarare än rå topprestanda. Detta kommer att påskynda deras användning i industriella och potentiellt konsumenttillämpningar.
- Hydrauliska ställdon: Dessa erbjuder högre effekt och bättre momentkontroll, men kan vara mycket skrymmande (t.ex. originalet Atlas). Elektrohydrauliska ställdon (EHA) erbjuder en lösning för att mildra detta storleksproblem. Hydrauliska system uppvisar hög stötdämpning men har lägre effektivitet (40–55 %) och kräver mer underhåll.
- Pneumatiska ställdon: De fungerar utifrån gasernas kompressibilitet; ett välkänt exempel är McKibben-muskeln.
Kawasaki utvecklar till exempel ”Hydro Servo Muscle”, ett elektrohydrauliskt ställdon utformat för att erbjuda hög stöttålighet och effekttäthet för sin humanoida robot Kaleido. Boston Dynamics beslut att göra den nya Atlas helt elektrisk antyder en trend mot kommersialisering och bredare tillämpning.
Jämförande analys av aktuatortekniker för humanoida robotar
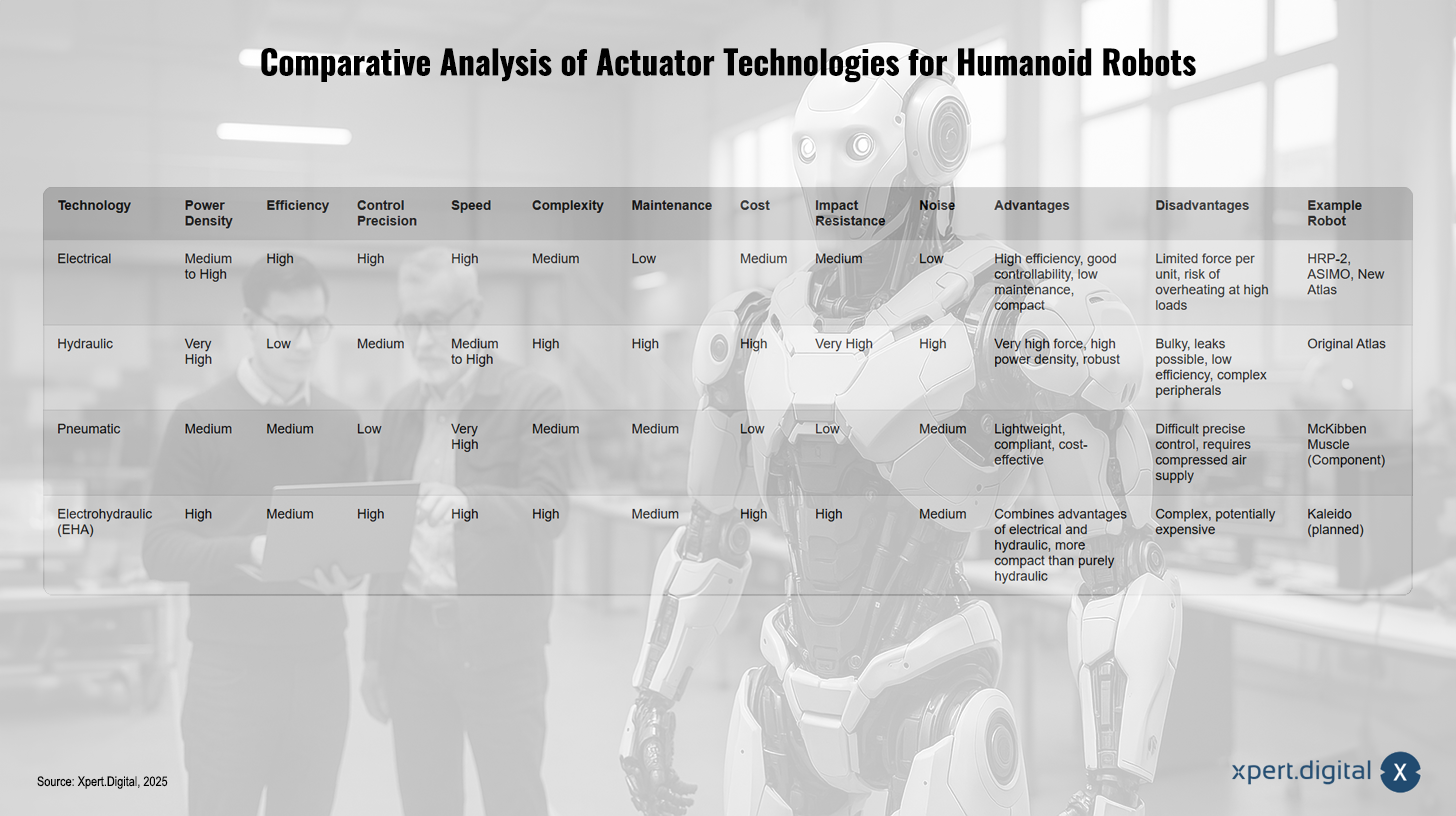
Jämförande analys av aktuatortekniker för humanoida robotar – Bild: Xpert.Digital
Jämförande analyser av ställdonstekniker för humanoida robotar visar att elektriska ställdon erbjuder hög effektivitet, god styrbarhet, låga underhållskrav och kompakthet, men är begränsade i maximal kraft och överhettning – exempel inkluderar HRP-2, ASIMO och den nya Atlas. Hydrauliska ställdon erbjuder mycket hög kraft, hög effekttäthet och robusthet, men är skrymmande, ineffektiva, benägna att läcka och kräver komplex kringutrustning, vilket demonstreras av den ursprungliga Atlas. Pneumatiska ställdon är tilltalande på grund av sin lätthet, följsamhet och kostnadseffektivitet, men är svåra att styra exakt och kräver tryckluft; ett exempel är McKibben-muskeln. Elektrohydrauliska ställdon (EHA) kombinerar styrkorna hos elektriska och hydrauliska drivningar, är mer kompakta än rent hydrauliska system, men är komplexa och potentiellt dyra, vilket är fallet med den planerade Kaleido.
Material och strukturell design
Lätta strukturer är avgörande för flexibilitet, energieffektivitet och förlängd batteritid hos humanoida robotar. Ett högt viktförhållande och hög strukturell styvhet är önskvärt. Evolutionära strukturella optimeringsmetoder (ESO) används för att avsevärt minska vikten på ramkonstruktioner (med 50,15 % i en studie) utan att kompromissa med styvhet eller vibrationsbeteende. Material som används inkluderar magnesiumlegeringar och polymerhartser, som används i ASIMO.
Energisystem (batterier)
Strömförsörjning är en av de största utmaningarna. Litiumjonbatterier (Li-jon) och litiumjärnfosfatbatterier (LiFePO₄) används ofta. Tesla Optimus använder till exempel ett 2,3 kWh, 52V-system, medan Unitree H1 använder ett 15 Ah (0,864 kWh) batteri. Valkyries batteri har en kapacitet på 1,8 kWh och möjliggör en driftstid på cirka en timme.
De viktigaste utmaningarna är den begränsade energitätheten, vilket leder till korta driftstider; den höga effekt som krävs för dynamiska åtgärder; den långsamma laddningshastigheten (industriella tillämpningar kräver ofta ~20 timmars drift, medan det för närvarande är mer som 4-6 timmar); och batterisäkerhet under extrema miljöförhållanden. Framsteg förväntas inom halvfastämnes- och fastämnesbatterier, vilka lovar högre energitätheter (t.ex. Xinwangda med 500 Wh/kg, Farasis Energy med >330 Wh/kg, REPT med >400 Wh/kg). Snabbladdningstekniker är också avgörande.
Relaterat till detta:

Sensor- och perceptionssystem
Humanoida robotar måste uppfatta sin omgivning exakt för att interagera säkert och effektivt. Perception spelar en grundläggande roll för att möjliggöra sömlös interaktion med människor och miljön. Att enbart förlita sig på visuella system är otillräckligt för komplexa manipulationer och säkra interaktioner i röriga eller dolda miljöer. Därför framstår proprioception och taktil avkänning som nästa stora frontlinje inom sensorteknik för humanoider. Begränsningarna av visuell perception i uppgifter som att gripa tag i dolda föremål eller applicera exakta krafter driver betydande forsknings- och utvecklingsinsatser inom dessa andra sensoriska modaliteter. Framgångar inom dessa områden kommer att låsa upp en ny nivå av manipulativ förmåga.
Visuella system
Kameror (RGB, djupkameror), LiDAR, radar och ultraljudssensorer används för miljöavkänning, objektdetektering och navigering. Tesla Optimus förlitar sig starkt på kameror (en flerkamerauppsättning liknande dess fordon), medan Boston Dynamics Atlas använder LiDAR-, djup- och RGB-sensorer. Valkyrie använder Carnegie Robotics Multisense SL-systemet (laser, stereo, IR-strukturerat ljus) samt ytterligare varningskameror.
Auditiva system
Mikrofoner används för taligenkänning och inspelning av omgivningsljud.
Taktila sensorer
Detta är avgörande för manipulation, igenkänning av objektegenskaper (form, styvhet, mjukhet) och säker interaktion. Det inkluderar kraft-, tryck-, vridmoment-, glid- och temperatursensorer. Den mänskliga handen har cirka 17 000 taktila receptorer; att replikera detta är en enorm utmaning. Framsteg inkluderar flexibla elektroniska skinn (e-skins) och avancerade AI-algoritmer. Företag som Sanctuary AI (Phoenix-robot), Meta AI (Digit 360 med GelSight-teknik) och Duke University (SonicSense med akustik) gör framsteg inom detta område. Taktila sensorer möjliggör blindgrepp, gliddetektering och undvikande av överdriven kraft, vilket är särskilt viktigt eftersom många nuvarande robotgripdon fortfarande är enkla tvåfingers- eller sugkoppssystem.
Proprioception
Detta är känslan av ens egen kroppsposition och rörelse utan visuella eller auditiva stimuli och är avgörande för robust kontroll, särskilt i mjuka robotar. Även för biologiska system är detta en utmaning; nuvarande robotar saknar ofta denna rika återkoppling. KineSoft-ramverket använder till exempel töjningssensormatriser för formuppskattning i mjuka robothänder.
Sensorfusion och tillståndsuppskattning
Att kombinera data från flera sensorer (multisensorfusion) med hjälp av tekniker som Bayesianska filter och optimeringsmetoder (maximum a posteriori, MAP) är avgörande för robust intern tillståndsuppskattning och förståelse av den externa miljön. Maskininlärning föredras alltmer framför regelbaserade system i detta sammanhang.
Programvara, AI och kontrollarkitekturer
Intelligensen och beteendet hos humanoida robotar bestäms av komplex programvara, avancerade AI-modeller och sofistikerade kontrollarkitekturer. Utvecklingen av enskilda komponenter (ställdon, sensorer, batterier) drivs i allt högre grad av kraven från AI och inlärningsbaserade styrsystem. Detta skapar en återkopplingsslinga där AI-framsteg kräver bättre hårdvara, och förbättrad hårdvara möjliggör mer komplex AI. AI-modeller för komplexa uppgifter som helkroppsmanipulation eller smidig förflyttning kräver mycket responsiva ställdon, tät sensorisk återkoppling (särskilt taktil) och tillräcklig kraft. Inlärningsbaserade metoder, till exempel, drar nytta av hårdvara utformad för maskininlärningskompatibilitet (t.ex. enkel datainsamling, robusta sensorer). Denna samutveckling är avgörande för att övervinna nuvarande prestandaplatåer.
Rörelse och dynamisk jämvikt
Att upprätthålla dynamisk jämvikt bygger på koncept som nollmomentpunkten (ZMP). Model Predictive Control (MPC) och Whole-Body Control (WBC) är populära metoder för att integrera sofistikerade modeller och generera följsamma rörelser. Parameterval är fortfarande en utmaning, eftersom manuell finjustering är mycket arbetsintensiv. Metoder som DiffTune använder differentierbar programmering för automatisk finjustering. Inlärningsmetoder (t.ex. förstärkningsinlärning) används för tvåbent förflyttning och fallåterhämtning.
Manipulation och fingerfärdighet
Helkroppskontroll koordinerar många frihetsgrader för komplexa uppgifter. Att replikera mänskliga finmotoriska färdigheter är ett betydande forskningsområde. Helkroppsmanipulation, dvs. att använda vilken kroppsdel som helst för interaktion, utgör en stor utmaning. Roboten RoboPanoptes använder till exempel helkroppsseende (21 kameror) för helkroppsfärdighet. Att lära sig från mänskliga demonstrationer (imitationsinlärning) är en viktig metod.
Navigering och miljöinteraktion
Banplanering, hinderundvikande och självkollisionsdetektering är avgörande för rörelse i komplexa miljöer. SLAM (Simultaneous Localization and Mapping) i kombination med Reinforcement Learning (RL) används för navigering av mobila robotar för att förbättra konvergens och minska kollisioner.
Människa-robotinteraktion (HRI) och kognitiva förmågor
Språkmodeller (LLM) och visionsspråkmodeller (VLM) förbättrar robotars logiska resonemang och kontextuella förståelse, vilket möjliggör mer naturliga, dialogorienterade interaktioner. Robotar ges "personligheter" och nyfikna beteenden. Utmaningar inkluderar språkets tvetydighet, vilket kan leda till fel, och komplexiteten i att mappa språk till fysiska handlingar. Finjustering av LLM på robotdata (Vision Language-Action Models – VLA) är en lovande metod.
Lärandeparadigmer och AI-modeller
Ett skifte pågår från regelbaserade system till maskininlärning (ML) och djupinlärning (DL). Förstärkningsinlärning (RL) används för motoriska färdigheter, liksom imitationsinlärning från mänskliga demonstrationer. Sim-till-verklighetsöverföring är avgörande för effektiv träning; ToddlerBot-plattformen, till exempel, designades för ML-kompatibilitet och datainsamling. Det slutgiltiga målet är artificiell generell intelligens (AGI), vilket skulle göra det möjligt för robotar att lära sig, resonera och anpassa sig till ett brett spektrum av uppgifter som människor utan specifik förprogrammering. Den "svarta lådan"-karaktären hos vissa avancerade AI-modeller, särskilt inom djupinlärning, utgör en utmaning för säkerhetskritiska applikationer och felsökning. Detta kräver nya metoder för förklaring och verifiering i humanoida styrsystem. Medan AI möjliggör exempellösa möjligheter är svårigheten att förstå hur djupinlärningsmodeller når fram till beslut ett problem, särskilt för robotar som interagerar nära människor eller arbetar i farliga miljöer. Denna brist på tolkningsbarhet kan hindra säkerhetscertifiering och buggfixar, och driva forskning mot mer transparent AI eller mer robusta valideringsmetoder.
🎯🎯🎯 Dra nytta av Xpert.Digitals omfattande, femfaldiga expertis i ett heltäckande tjänstepaket | BD, R&D, XR, PR och optimering av digital synlighet

Dra nytta av Xpert.Digitals omfattande, femfaldiga expertis i ett heltäckande tjänstepaket | FoU, XR, PR och optimering av digital synlighet - Bild: Xpert.Digital
Xpert.Digital besitter djupgående kunskap inom olika branscher. Detta gör det möjligt för oss att utveckla skräddarsydda strategier som är exakt anpassade till kraven och utmaningarna inom just ditt marknadssegment. Genom att kontinuerligt analysera marknadstrender och övervaka branschutvecklingen kan vi agera proaktivt och erbjuda innovativa lösningar. Kombinationen av erfarenhet och expertis genererar mervärde och ger våra kunder en avgörande konkurrensfördel.
Mer information här:
Kommersialisering och potential: Marknadsgenombrottet för humanoida robotar
Tillämpningar av humanoida robotar (per sektor, med fokus på 2025)
Humanoida robotar hittar alltmer tillämpning inom en mängd olika sektorer, och deras människoliknande form och växande förmågor gör dem idealiska för uppgifter som traditionellt utförs av människor. År 2025 förväntas betydande framsteg inom testning och initial driftsättning, särskilt inom industrisektorer, hälso- och sjukvård och nischapplikationer. Den människoliknande formen är ett tveeggat svärd: även om den underlättar integration i mänskliga miljöer och människa-robotinteraktion (HRI), väcker den också höga förväntningar på fingerfärdighet och intelligens som för närvarande är svåra att uppfylla. Detta kan leda till besvikelse om förmågorna inte lever upp till det antropomorfa löftet. Den mänskliga handen besitter otrolig fingerfärdighet, och mänsklig intelligens är mycket anpassningsbar. Nuvarande robotar, trots förbättringar, kämpar fortfarande med finmanipulation och robust drift i ostrukturerade miljöer. Denna skillnad mellan utseende och faktisk prestanda kan negativt påverka acceptans och upplevda fördelar om den inte hanteras noggrant.
Relaterat till detta:

Industriell automation (tillverkning och logistik)
Inom industriell automation lovar humanoida robotar att effektivisera monteringslinjer, underhålls- och inspektionsarbete samt logistikprocesser.
Tillverkning: Humanoida robotar hjälper mänskliga arbetare med precisionsuppgifter, lyft av tunga laster och repetitiva aktiviteter.
- Fallstudie: BMW och Figure AI: Figure 02-robotar används vid BMW-fabriken i Spartanburg, South Carolina, för uppgifter som chassimontering och transport av delar. Efter inledande pilotprojekt 2024 genomfördes en permanent implementering i början av 2025. Funktionella uppgraderingar i november 2024 resulterade i en ökning av rörelsehastigheten med 400 %, vilket gör det möjligt för robotarna att placera upp till 1 000 komponenter per dag. Figure AI planerar att producera 100 000 till 200 000 enheter under de kommande fyra åren (2025–2028).
- Fallstudie: Mercedes-Benz & Apptronik: Apollo-roboten assisterar arbetare i produktionshallen.
- Tesla planerar att använda Optimus-robotar för uppgifter som att lasta plåt i sina fabriker, och flera tusen enheter förväntas utföra meningsfulla uppgifter år 2025. BYD siktar på att använda 1 500 humanoida robotar år 2025, och skala upp till 20 000 år 2026.
Logistik och lagerhållning: Humanoida robotar optimerar materialhantering, lagerhantering samt plock-, pack- och sorteringsprocesser.
- Fallstudie: Amazon & Agility Robotics: Amazon testar Digit-roboten för hantering och återvinning av containrar i sina forsknings- och utvecklingscenter och lager. Digit är designad för 8-timmarsskift. Amazon testar även Apollo-roboten från Apptronik.
- Humanoider kan minska mänskligt arbete vid mottagning och lossning av varor, lagring, orderplockning, packning, märkning, frakt och lastning, samt i lagerhållning.
- IDTechEx registrerade endast ett begränsat antal pilotprojekt (<100 humanoider) i lagerlokaler i början av 2025. Storskalig driftsättning (tusentals enheter) förväntas inte ske före slutet av 2025 på grund av testcykler på 18–30 månader. Ett genombrott inom logistiken förväntas under 2026–2027.
De mest framgångsrika tillämpningarna hittills, såsom Moxi inom sjukhuslogistik och Digit inom containerhantering i lager, fokuserar på specifika, repetitiva uppgifter i relativt strukturerade miljöer, snarare än generell autonomi. Detta tyder på en väg mot ett bredare införande: börja med specialiserade uppgifter och generalisera sedan allt eftersom tekniken mognar. Moxi utför leveranser, Digit flyttar containrar. Dessa är tydligt definierade uppgifter. Denna metod står i kontrast till visionen om universalrobotar. Framgången med uppgiftsspecifika humanoider ger avkastning på investeringen och genererar data för att förbättra den allmänna kapaciteten, vilket skapar en positiv cykel. Denna stegvisa metod är mer praktisk än att försöka implementera full universalkapacitet från början.
Hälso- och sjukvård och äldreomsorg
Inom denna sektor erbjuder humanoida robotar stöd för medicinsk personal, patientvård, socialt stöd och rehabiliteringsåtgärder.
Sjukhuslogistik: Moxi, från Diligent Robotics, används i över 24 hälso- och sjukvårdssystem och har genomfört nästan en miljon leveranser (labbprover, förbrukningsvaror), vilket sparar personalen avsevärd tid och gångavstånd. Avkastningen på investeringen syns i ökad effektivitet och minskad personalutbrändhet. Robotics-as-a-Service (RaaS)-modellen kommer sannolikt att vara en viktig drivkraft för implementering i små och medelstora företag (SMF) och för distribution av humanoider i sektorer där höga initiala investeringar är oöverkomliga, vilket demokratiserar tillgången till avancerad robotteknik. Höga anskaffningskostnader är ett stort hinder. RaaS-modellen sänker inträdesbarriären genom att flytta kostnader från kapitalutgifter (Capex) till driftskostnader (Opex). Moxis framgång med denna modell inom hälso- och sjukvården visar dess lönsamhet. I takt med att humanoider blir mer kapabla kan RaaS göra det möjligt för mindre företag eller avdelningar att använda dem utan massiva initialinvesteringar, vilket potentiellt accelererar marknadspenetrationen.
Äldreomsorg, sällskap och hjälp: Robotar som Grace (Hanson Robotics), Pepper (SoftBank), Nadine, PARO, ElliQ, Temi och Toyota HSR erbjuder social interaktion, påminnelser om medicinering, hälsoövervakning och stöd med dagliga aktiviteter. Studier visar positivt engagemang och emotionellt stöd.
Rehabilitering: Humanoider som Baxter och NAO används som terapiassistenter för strokepatienter och barn, där de vägleder övningar och håller patienterna engagerade.
Kirurgisk assistans: Da Vinci kirurgiska system ger stöd under minimalinvasiva operationer.
Rymdutforskning och farliga miljöer
Rymdforskning: stödja astronauter, utföra extravehikulära aktiviteter (EVA), förbereda livsmiljöer och utföra underhåll på ISS eller framtida mån-/Marsbaser. Exempel inkluderar NASA:s Robonaut 2 (den första humanoiden i rymden), Valkyrie (designad för Mars-uppdrag) och DLR-robotarna Rollin' Justin, Agile Justin och TORO. Autonom drift är avgörande på grund av kommunikationsförseningar. Modulär design för reparationsmöjligheter är viktig (t.ex. Valkyrie).
Farliga miljöer (katastrofhjälp, kärnkraftssektorn): Navigering i farlig terräng, sök- och räddningsinsatser, leverans av hjälpförnödenheter, hantering av giftiga material, brandbekämpningsstöd. Exempel: Atlas by Boston Dynamics (utformad för sådana uppgifter), Spot vid Fukushima Daiichi för rekognoscering, strålningsmätning och provtagning av skräp. Vid Fukushima används robotar för övervakning, dekontaminering och förberedelser för borttagning av bränslerester.
Personlig assistans och hushållsapplikationer
Humanoida robotar är avsedda att ta över hushållssysslor (städning, matlagning, tvätt), ge trygghet och fungera som sällskap i framtiden. Detta område är fortfarande i ett mycket tidigt skede. NEO Gamma från 1X Technologies har testats i hemmiljö för uppgifter som att göra kaffe och hjälpa till med matlagning (fjärrstyrt). Utmaningarna inkluderar ostrukturerade hemmiljöer, säkerhet, kostnad och den allmänna intelligens som krävs.
Utbildning, underhållning och kundservice
Utbildning: Interaktiva lärarassistenter, personligt anpassat lärande, särskilt för STEM-ämnen och elever med särskilda behov. Nao från SoftBank Robotics används flitigt (>13 000 enheter i över 70 länder) och används för att undervisa i programmering, kulturarv, matematiska begrepp och för att stödja barn med autism. Studier visar att Nao ökar engagemanget men kan ha användbarhetsproblem i bullriga miljöer.
Underhållning: Interaktiva värdar, artister i temaparker, på evenemang och i media. Ameca från Engineered Arts är känt för sina naturtrogna ansiktsuttryck. RoboThespian används för teaterföreställningar. Marknaden för underhållningshumanoider förväntas växa avsevärt.
Kundtjänst och hotell: Receptionister, informationsassistenter, concierger inom detaljhandel, hotell och banker. Pepper från SoftBank har testats som receptionsrobot på sjukhus och i butiker.
Framväxande och nischade applikationer
Andra tillämpningsområden inkluderar militär och försvar (spaning, ammunitionsförstöring, träningssimuleringar) samt jordbruk och byggnation.
Viktiga tillämpningsområden och lämplighet för humanoida robotar (från och med 2025)
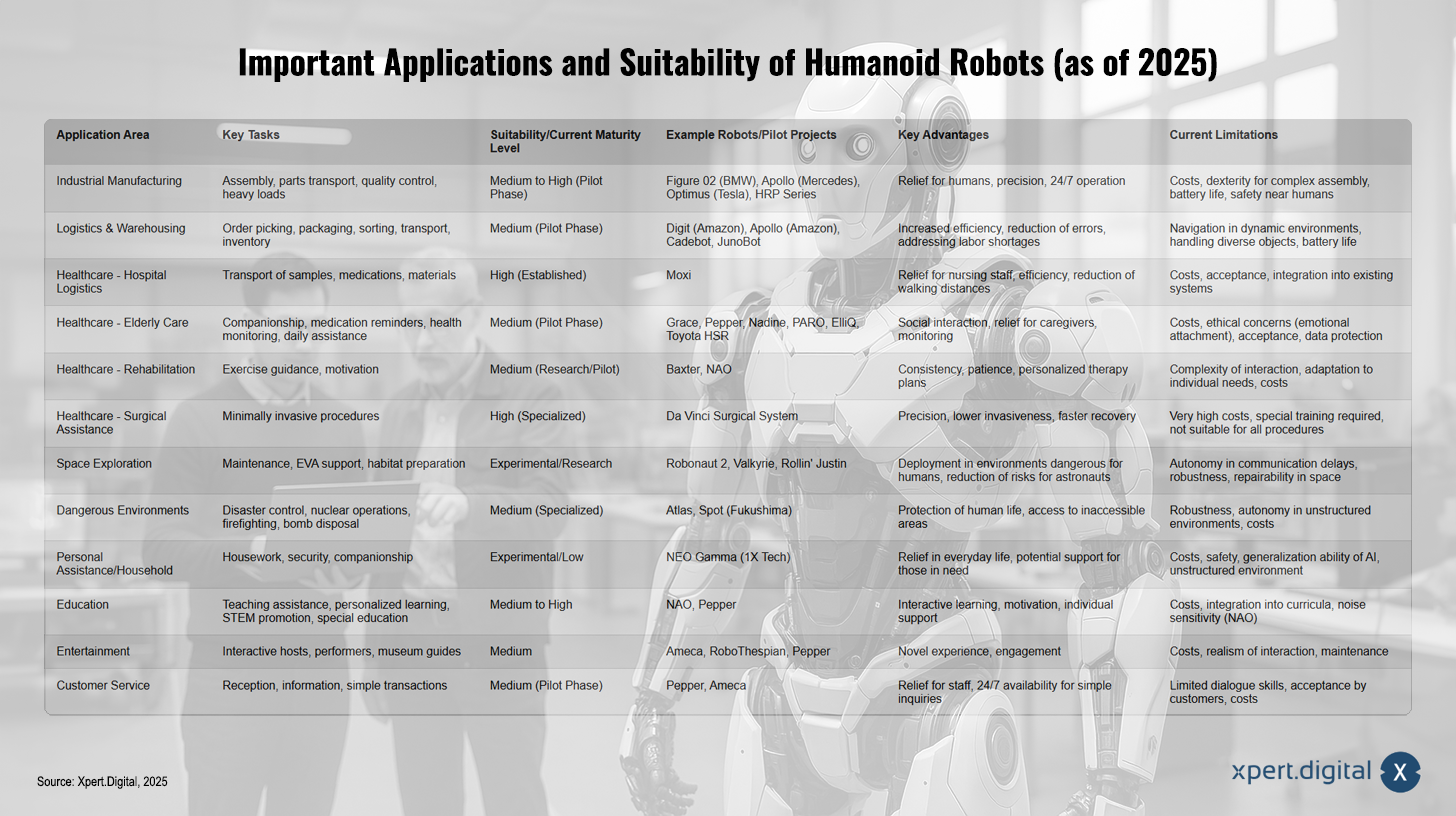
Viktiga tillämpningsområden och lämplighet för humanoida robotar (från och med 2025) – Xpert.Digital
Viktiga tillämpningsområden och lämpligheten för humanoida robotar år 2025 omfattar ett flertal områden. Inom industriell tillverkning tar robotar över uppgifter som montering, transport av delar, kvalitetskontroll och förflyttning av tunga laster. Med projekt som Figure 02 (BMW), Apollo (Mercedes), Optimus (Tesla) och HRP-serien har de nått en medelhög till hög mognadsnivå, men är fortfarande begränsade av kostnad, batteritid och säkerhet i nära anslutning till människor. Inom logistik och lagerhållning används humanoida robotar för orderplockning, sortering och transport. Exempel som Amazons Digit och Apollo, eller Cadebot och JunoBot, visar på lovande pilotprojekt, även om utmaningar som dynamiska miljöer och hantering av olika föremål kvarstår. Inom sjukvården finns robotar främst inom sjukhuslogistik, där modeller som Moxi är etablerade för att avlasta vårdpersonal genom att transportera prover och mediciner. Inom äldreomsorgen hjälper humanoider som Grace och Pepper till med dagliga aktiviteter, men etiska problem och dataskyddsfrågor förblir hinder. För rehabilitering, såsom motivationsövningar, ger robotar som Baxter och NAO stöd; Ytterligare forskning behövs dock för att förfina interaktionen. En pionjär inom kirurgisk assistans är da Vinci Surgical System, vilket möjliggör minimalt invasiva ingrepp med hög precision, men är endast lämpligt för specifika tillämpningar och är mycket dyrt.
Inom rymdutforskning används robotar som Robonaut 2, Valkyrie och Rollin' Justin för att utföra underhåll och förbereda livsmiljöer i farliga miljöer, vilket minimerar riskerna för astronauterna. Utmaningar kvarstår dock när det gäller autonomi, robusthet och reparationsmöjligheter. I farliga miljöer, såsom katastrofhjälp eller kärnvapenscenarier, tillhandahåller robotar som Atlas och Spot viktiga tjänster. Personlig assistans och hushållshantering är fortfarande experimentell med prototyper som NEO Gamma, där kostnad, säkerhet och flexibilitet i ostrukturerade miljöer fortfarande utgör hinder. Inom utbildning främjar robotar som NAO och Pepper interaktivt lärande och personligt stöd, medan kostnad och integration av läroplaner fortfarande är utmaningar. System som Ameca och RoboThespian finns också inom underhållning och erbjuder nya upplevelser som museiguider eller artister. Inom kundservice ger de support i receptionen och med information, vilket ger fördelen av tillgänglighet dygnet runt; begränsade dialogmöjligheter och acceptans är dock problem. Sammantaget visar humanoida robotar enorm potential, men står för närvarande fortfarande inför tekniska, ekonomiska och sociala hinder för att fullt ut förverkliga sin potential.
Marknadslandskap och kommersialisering (från och med 2025)
Marknaden för humanoida robotar år 2025 befinner sig i en dynamisk övergångsfas från forskning och utveckling till början av kommersiell användning. Ett växande antal företag, från etablerade teknikföretag till agila startups, driver innovation och tävlar om marknadsandelar i denna lovande sektor.
Ledande företag och plattformar för humanoida robotar
De mest framstående aktörerna som driver utvecklingen och kommersialiseringen av humanoida robotar inkluderar (från och med ungefär 2025):
- Tesla: Med Optimus Gen 2 siktar Tesla på användning i sin egen tillverkning och potentiellt för allmänna assistansuppgifter.
- Boston Dynamics: Electric Atlas är känd för sin exceptionella rörlighet och vidareutvecklas för forskning, industriell inspektion och katastrofhjälp.
- Figur AI: Med modellerna Figur 01, Figur 02 och de aviserade Figur 03 fokuserar företaget på universalrobotar för industri och logistik, med pilotprojekt bland annat hos BMW.
- Agilitetsrobotar: Digit-roboten är specifikt utformad för logistikapplikationer och testas av företag som Amazon.
- Apptronik: Apollo utvecklas för industriella tillämpningar och logistik, med partnerskap bland annat från Mercedes-Benz och Amazon.
- Unitree Robotics: Erbjuder mer flexibla och kostnadseffektiva alternativ för forskning, utbildning och lätta industriella uppgifter med modeller som G1 och H1.
- Sanctuary AI: Phoenix-roboten siktar på kognitiva förmågor och människoliknande beteende för komplexa uppgifter inom olika sektorer.
- 1X Technologies: NEO är utformad för användning i hemmet och för assistansuppgifter.
- PAL Robotics: En etablerad europeisk tillverkare med ett utbud av robotar (REEM, TIAGo, TALOS, ARI) för forskning, sjukvård och servicetillämpningar.
- Honda: Även om ASIMO har lagts ner är företagets arv och grundforskning fortfarande betydelsefullt för branschen.
- Ingenjörskonst: Ameca är känt för sina extremt verklighetstrogna ansiktsuttryck och interaktiva förmågor, främst för social interaktion och kundservice.
- UBTech Robotics: Med modeller som Walker X för olika tillämpningar.
- NEURA Robotics: 4NE-1 är utformad för samarbete mellan människa och robot i hem och industriella miljöer.
- DEEP Robotics: Dr01 är en robust humanoid för industriella precisionsuppgifter.
- Fourierintelligens: GR-1 används i olika sammanhang.
Framstående humanoida robotplattformar (ca 2025)
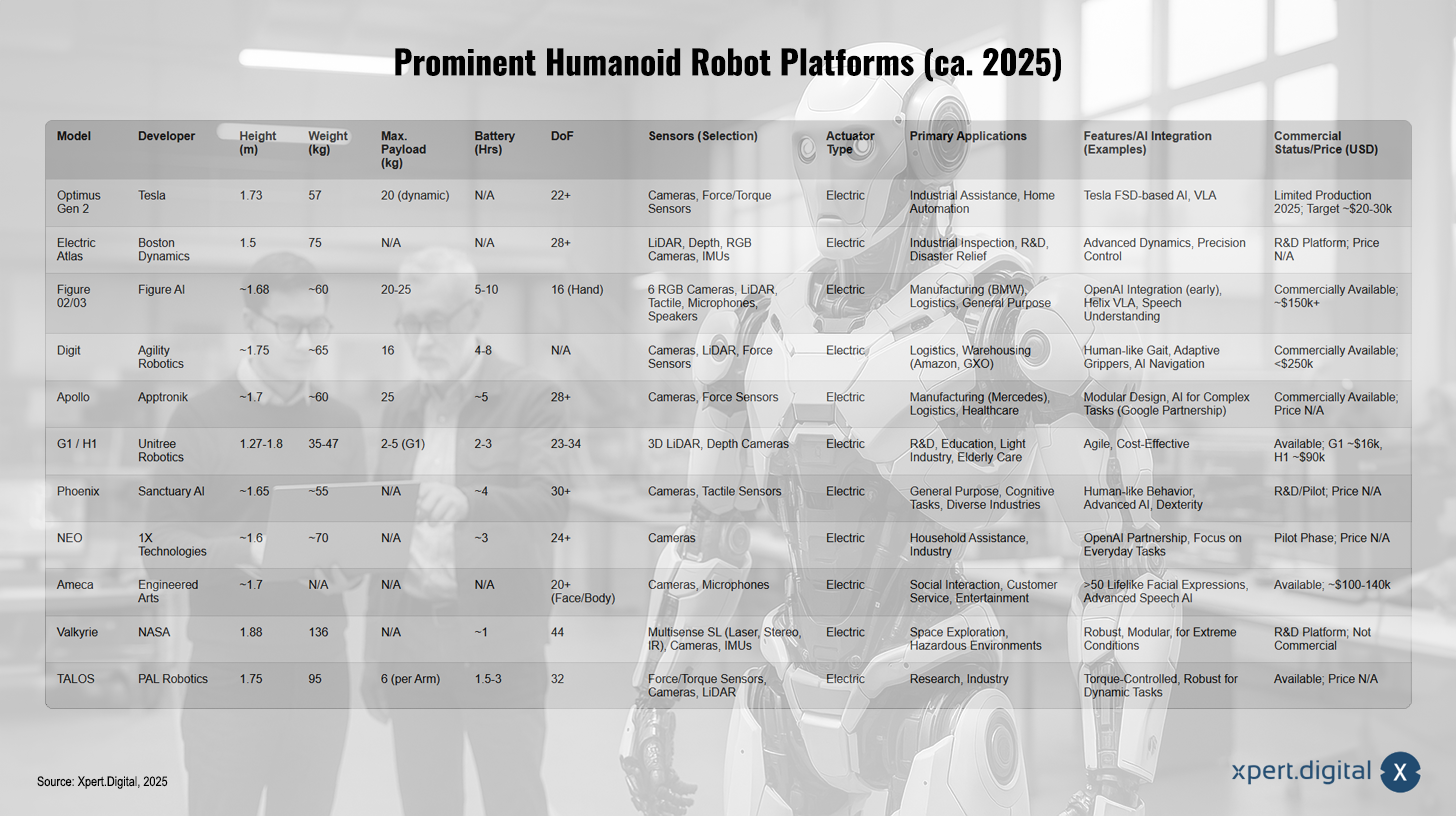
Framstående humanoida robotplattformar (ca 2025) – Bild: Xpert.Digital
Obs: Uppgifterna är uppskattningar eller baserade på tillgänglig information (från och med Q1/Q2 2025). ”n/a” = ej tillgängligt. DoF = Frihetsgrader.
Framstående humanoida robotplattformar år 2025 omfattar en mängd imponerande modeller lämpliga för industriella, hushålls- och vetenskapliga tillämpningar. Teslas Optimus Gen 2, som är 1,73 m hög och har en dynamisk nyttolastkapacitet på upp till 20 kg, är utrustad med Tesla FSD-baserad artificiell intelligens. Med begränsad produktion år 2025 är den planerad att kosta mellan 20 000 och 30 000 dollar. Boston Dynamics leder sortimentet med sin Electric Atlas, en modell som kännetecknas av avancerad dynamik och precisionskontroll, designad för industriella inspektioner och katastrofhjälp. Figure AI erbjuder sin Figure 02/03, en modell för tillverkning, logistik och allmänna tillämpningar, som använder OpenAI-integrationer och avancerad förståelse av naturligt språk, och prissatt till över 150 000 dollar.
Agility Robotics Digit, prissatt till under 250 000 dollar, har en människoliknande gång och adaptiva gripdon, vilket gör den idealisk för logistik och lagerhållning. Apptroniks Apollo, modulär i design och konstruerad för komplexa uppgifter med AI, används redan inom tillverkning och sjukvård. Mer prisvärda alternativ, som Unitree Robotics G1, prissatt till cirka 16 000 dollar, erbjuder smidighet och effektivitet för lätta industriella och utbildningsmässiga tillämpningar. Sanctuary AI:s Phoenix utmärker sig med sitt människoliknande beteende och avancerade AI, medan 1X Technologies NEO utmärker sig inom hushållsarbete och vardagliga uppgifter. Båda är fortfarande i pilotfasen.
För social interaktion och underhållning finns Engineered Arts Ameca, med över 50 verklighetstrogna ansiktsuttryck, tillgänglig från 100 000 dollar. NASA erbjuder Valkyrie, en robot designad för extrema förhållanden och rymdutforskning, medan PAL Robotics TALOS, med sin robusta och momentstyrda design, är idealisk för forskning och industri. Dessa robotplattformar visar på anmärkningsvärda framsteg inom teknik, AI-integration och flexibilitet, där varje plattform är skräddarsydd för specifika krav och därmed täcker ett brett spektrum av applikationer.
Investerings- och finansieringstrender
Sektorn för humanoida robotar attraherar betydande riskkapitalinvesteringar, med finansiering som alltmer koncentreras till färre men större rundor. Exempel inkluderar Figure AI, som fick 675 miljoner dollar i februari 2024 från investerare som Nvidia, Jeff Bezos, OpenAI och Microsoft; Physical Intelligence, som samlade in 400 miljoner dollar; och Apptronik, som fick 350 miljoner dollar (med stöd av Google). OpenAI investerade också 23,5 miljoner dollar i 1X Technologies. Globala investeringar i humanoida startups ökade från cirka 308 miljoner dollar år 2020 till 1,1 miljarder dollar år 2024. Investerare dras särskilt till flexibla, mångsidiga robotar med avancerade AI-"hjärnor" och tillämpningar inom högväxande områden som medicinsk robotik. Parallellt främjar nationella initiativ, särskilt i Kina ("Made in China 2025", "14:e femårsplanen"), massivt robotindustrin genom statligt stöd och utveckling av starka inhemska leveranskedjor.
Marknadsstorlek, tillväxtprognoser och segmentering
Prognoserna för tillväxten av marknaden för humanoida robotar är genomgående optimistiska, även om de exakta siffrorna varierar beroende på analys. Generellt sett förväntas 2024 markera utvecklingen av avancerade prototyper, 2025 starten av massproduktion och 2026 bredare kommersiell acceptans. Detta breda spektrum av marknadsprognoser återspeglar inte bara olika metoder utan också grundläggande osäkerheter kring den hastighet med vilken tekniska hinder (se avsnitt 6) kan övervinnas och en bred samhällelig acceptans (se avsnitt 7) uppnås. De mer optimistiska prognoserna förutsätter ofta snabba genombrott inom AI och kostnadsminskningar. Den slutliga marknadsstorleken kommer att bero starkt på hur dessa faktorer utvecklas.
Sammanfattning av marknadstillväxtprognoser för humanoidrobotar
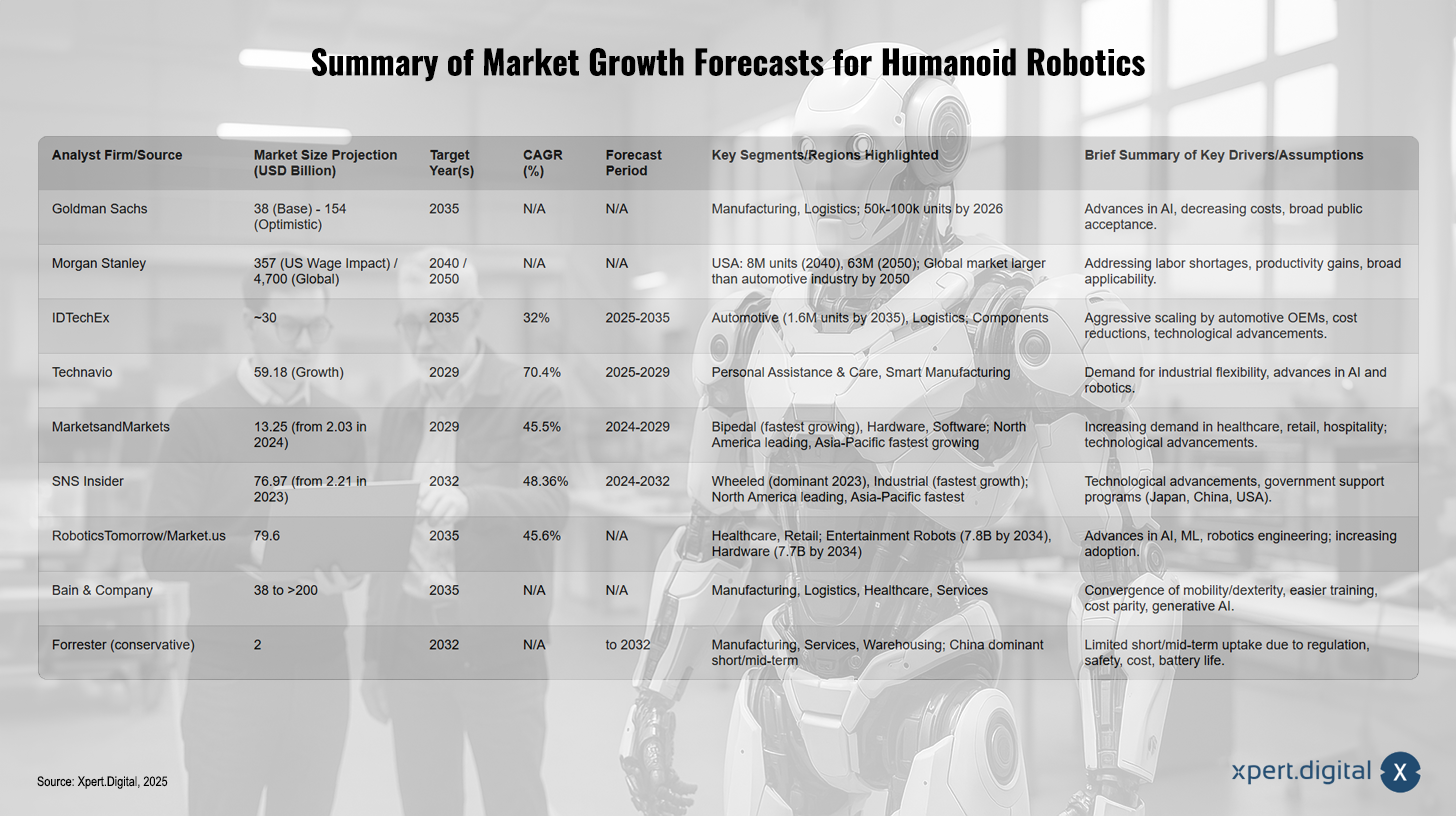
Sammanfattning av marknadstillväxtprognoser för humanoid robotik – Xpert.Digital
Marknadssegmentering:
- Per komponent: Hårdvara (sensorer, ställdon, energikällor, styrsystem) och programvara (AI-baserad).
- Baserat på mobilitet: tvåbent (dominant, anpassningsbar för logistik, sjukvård, utbildning) och hjulförsedd (stabilitet, lägre kostnader, för plana ytor). Marknaden för tvåbenta robotar växer snabbast (CAGR 54,47 % 2023–2028).
- Tillämpningsområde: Industri (ledande inom fordonsindustrin, logistik), personlig assistans och vård (betydande tillväxt), forskning, utbildning, underhållning, sök- och räddningstjänst, PR, militär.
- Per region: Nordamerika leder för närvarande, men Asien-Stillahavsområdet (särskilt Kina) förväntas uppleva den snabbaste tillväxten och potentiell dominans tack vare starka leveranskedjor och statligt stöd. Ett långsammare införande förväntas i Europa på grund av arbetsrätt och fackföreningar. Den geopolitiska dimensionen (USA:s ledarskap inom AI kontra Kinas dominans i leveranskedjorna) kan leda till regionala uppdelningar i teknikstandarder, applikationsprioriteringar och marknadsutveckling, vilket potentiellt kan skapa distinkta humanoida ekosystem. USA utmärker sig inom AI och högspecifikationsrobotik. Kina har en stark tillverkningsbas och utvecklar snabbt sina egna humanoider, ofta med inriktning på olika primärmarknader. Detta kan leda till olika utvecklingsvägar, där amerikanska företag fokuserar på avancerad AI-driven kapacitet och kinesiska företag utnyttjar stordriftsfördelar inom tillverkning och kostnadsfördelar. Handelspolitik och nationella säkerhetsproblem kan ytterligare förvärra dessa skillnader.
Marknadstillväxtprognoser för humanoidrobotar visar en dynamisk utveckling, med olika analytiker som har olika åsikter. Goldman Sachs uppskattar marknaden till mellan 38 och 154 miljarder dollar år 2035 och nämner framsteg inom artificiell intelligens (AI), minskande kostnader och utbredd allmän acceptans som viktiga drivkrafter. Morgan Stanley förutspår en global marknad som överträffar bilindustrin år 2050, med upp till 63 miljoner enheter världen över och en betydande inverkan på lönerna i USA. IDTechEx förväntar sig en årlig tillväxt på 32 % för 2025–2035, driven av tekniska framsteg och kostnadsminskningar inom fordons- och logistiksektorerna. Technavio prognostiserar en marknadsvolym på 59,18 miljarder dollar år 2029 och identifierar personlig assistans, vård och smart tillverkning som viktiga tillväxtsegment på grund av framsteg inom AI och robotik. MarketsandMarkets förutspår en årlig tillväxt på 45,5 % fram till 2029, ledd av Nordamerika och Asien-Stillahavsområdet, med ökande efterfrågan inom hälso- och sjukvård, detaljhandel och hotell- och restaurangbranschen. SNS Insider framhäver vikten av statliga incitamentsprogram och förutspår en tillväxt på 76,97 miljarder dollar år 2032, med Nordamerika i täten och Asien-Stillahavsområdet som upplever den snabbaste tillväxten. RoboticsTomorrow/Market.us förväntar sig en volym på 79,6 miljarder dollar år 2035, accelererad av framsteg inom AI, maskininlärning och robotteknik, med särskilda utsikter inom underhållning och hårdvara. Bain & Company förutspår en marknad på 38 miljarder dollar till över 200 miljarder dollar år 2035 och ser potential inom områden som tillverkning, hälso- och sjukvård och generativ AI. Däremot är Forrester fortfarande mer konservativt och förväntar sig endast 2 miljarder dollar år 2032, på grund av utmaningar som reglering, säkerhet och batterieffektivitet. Sammantaget drivs tillväxten av framsteg inom teknik, AI och en ökande efterfrågan på automatisering, produktivitet och effektivitet.
Affärsmodeller (t.ex. RaaS)
RaaS-modellen (Robotics as a Service) vinner alltmer framträdande. Den gör det möjligt för företag att leasa robotar istället för att göra stora initiala investeringar, vilket gör humanoida robotar tillgängliga för små och medelstora företag (SMF). Direktförsäljnings- och leasingmodeller kommer att förändra det industriella landskapet. Framväxten av RaaS är inte bara en finansieringsmodell, utan en strategisk faktor som avsevärt skulle kunna påskynda implementeringen i SMF och tillväxtsektorer genom att sänka inträdesbarriärerna och därmed utöka marknadsbasen bortom stora företag. Höga förvärvskostnader är ett stort hinder. RaaS omvandlar investeringskostnader till driftskostnader, vilket gör avancerad robotteknik mer tillgänglig. Detta är särskilt relevant för SMF som inte har råd med stora investeringar. Om humanoider effektivt kan distribueras via RaaS, kan detta leda till en mycket snabbare marknadspenetration än om försäljningen enbart var baserad på kapitalvaror, och potentiellt överträffa vissa konservativa implementeringsprognoser.
Konkurrensdynamik och marknadspositionering
Konkurrensen står mellan vertikalt integrerade utvecklare (t.ex. Tesla, som utvecklar hårdvara och AI internt) och företag som förlitar sig på partnerskap (t.ex. Figure AI initialt med OpenAI, Apptronik med Google). USA leder inom AI-utbildning och avancerade applikationer, medan Kina dominerar inom leveranskedjor, med initialt mer fokus på underhållning och utbildning men snabbt kommer ikapp inom industrisektorn. Enligt Gartners Hype Cycle gick humanoida robotar in i "Innovation Trigger"-fasen 2024, även om ett brett införande fortfarande kan vara mer än 10 år bort. Forrester rankade humanoider som en av de 10 bästa framväxande teknologierna 2025 och förutspår en omvälvande inverkan år 2030.
Vår rekommendation: 🌍 Obegränsad räckvidd 🔗 Uppkopplad 🌐 Flerspråkig 💪 Säljkraft: 💡 Autentisk med strategi 🚀 Innovation möter 🧠 Intuition

Från lokalt till globalt: Små och medelstora företag erövrar världsmarknaden med en smart strategi - Bild: Xpert.Digital
I en tid där ett företags digitala närvaro avgör dess framgång ligger utmaningen i att skapa en autentisk, personlig och långtgående närvaro. Xpert.Digital erbjuder en innovativ lösning som positionerar sig som skärningspunkten mellan en branschnav, en blogg och en varumärkesambassadör. Den kombinerar fördelarna med kommunikations- och försäljningskanaler i en enda plattform och möjliggör publicering på 18 olika språk. Samarbete med partnerportaler och möjligheten att publicera artiklar på Google News och en pressdistributionslista med cirka 8 000 journalister och läsare maximerar innehållets räckvidd och synlighet. Detta representerar en avgörande faktor inom extern försäljning och marknadsföring (SMarketing).
Mer information här:
Nästa kapitel inom robotik: Människa-maskin-transformation
Viktiga utmaningar inom humanoid robotik och dess framtid
Trots de snabba framstegen och den enorma potentialen står humanoid robotik inför ett antal betydande tekniska, kommersiella och samhälleliga utmaningar som måste övervinnas för att möjliggöra en bred och framgångsrik implementering.
Tekniska utmaningar
Hårdvarubegränsningar:
- Batteritid och effekttäthet: Korta driftstider (ofta bara 2–5 timmar) och långa laddningstider begränsar kontinuerlig drift kraftigt. Den höga effekt som krävs för dynamiska åtgärder är krävande.
- Fingerfärdighet och manipulation: Att kopiera mänskliga händers fingerfärdighet för finmotoriska uppgifter och hantering av olika föremål är en stor utmaning. Nuvarande gripdon är ofta fortfarande för enkla. Avancerade taktila sensorer är avgörande för detta.
- Ställdonsprestanda: Att balansera prestanda, hastighet, precision, effektivitet och kostnad hos ställdon är fortfarande svårt.
- Sensorrobusthet och integration: Att säkerställa tillförlitlig sensorprestanda under verkliga förhållanden och effektivt sammanfoga data från olika sensortyper innebär utmaningar.
- Övergripande robusthet och tillförlitlighet: Det måste säkerställas att robotar fungerar konsekvent och utan frekventa fel i krävande, ostrukturerade miljöer.
Programvara och AI-komplexitet:
- Allmän intelligens och logiskt resonemang: Att uppnå människolik anpassningsförmåga, problemlösningsförmåga och sunt förnuft i olika och oförutsägbara situationer är en central utmaning. Nuvarande AI-system kan fortfarande göra "dumma misstag". Utmaningen med "allmän intelligens" är inte bara ett tekniskt AI-problem, utan är nära kopplad till mekanisk fingerfärdighet och sensorisk skärpa. En mycket intelligent robot med dålig fysisk förmåga kommer att ha begränsad användning, och vice versa. Detta kräver en samdesignstrategi. För att en robot ska vara verkligt universellt tillämpbar måste dess AI kunna förstå och resonera över ett brett spektrum av uppgifter och miljöer. Att utföra dessa uppgifter kräver dock sofistikerad fysisk interaktion – att gripa tag i olika objekt, navigera i komplex terräng. Om AI:n kan utveckla en plan, men hårdvaran (händer, ben, sensorer) inte kan utföra den på ett tillförlitligt sätt eller korrekt uppfatta omgivningen, är intelligensen värdelös. Detta understryker behovet av en nära koppling mellan AI och hårdvaruutveckling, snarare än att driva dem isolerat.
- Människa-robotinteraktion (MRI): Att skapa en naturlig, intuitiv och säker MRI, särskilt med icke-experter, är komplext. Jurister visar potential men introducerar också nya komplexiteter.
- Inlärningseffektivitet och överföring från simulering till verklighet: Utvecklingen av algoritmer som effektivt kan lära sig komplexa färdigheter med begränsad verklig data och tillförlitligt överföra inlärda beteenden från simulering till fysiska robotar är avgörande.
- Säkerhet och förutsägbarhet: Att säkerställa säker drift av autonoma system, särskilt i nära anslutning till människor, och förutsägbarheten och verifierbarheten av deras beteende är avgörande. Den "svarta lådan"-karaktär som vissa AI-modeller har är en anledning till oro i detta avseende.
Utmaningar inom kommersialisering och skalbarhet
- Kostnader: Höga enhetskostnader (mellan 20 000 och över 150 000 dollar, beroende på modell och funktioner) och totala driftskostnader (inklusive utbildning, underhåll och programvara) är ett hinder. Kostnadsparitet med mänsklig arbetskraft närmar sig för vissa lågkvalificerade jobb men har ännu inte uppnåtts universellt. Den höga kostnaden för humanoider är ett hinder, men den totala ägandekostnaden och värdeerbjudandet (inklusive faktorer som dygnet runt-drift, säkerhet under farliga uppgifter och åtgärdande av arbetskraftsbrist) kommer i slutändan att avgöra avkastningen på investeringen. Att enbart fokusera på enhetspriset är inte tillräckligt. Även om en robot för 100 000 dollar kan verka dyr, kan dess ekonomiska värde vara betydande om den kan ersätta flera mänskliga skift, arbeta kontinuerligt, minska fel och utföra uppgifter som människor inte kan eller vill göra. Avkastningsberäkningen måste vara holistisk, med hänsyn till produktivitetsvinster, minskade arbetskraftskostnader, förbättrad säkerhet och ökad operativ flexibilitet. Detta nyanserade perspektiv är avgörande för företag som överväger att införa den.
- Avkastning på investeringen (ROI): Att visa en tydlig och övertygande ROI för företag, särskilt jämfört med befintlig specialiserad automation eller mänsklig arbetskraft, är en utmaning. Långa testcykler inom branscher som logistik (18–30 månader) försenar beslutsfattandet.
- Tillverkning och leveranskedja: Uppskalning av massproduktionen av komplexa humanoida robotar stöter på flaskhalsar, såsom begränsad tillgång på högprecisionsskruvar. Det finns ett beroende av specialiserade komponenter och globala leveranskedjor. Produktionsflaskhalsar för specialiserade komponenter (t.ex. högprecisionsskruvar, ställdon) tyder på att själva leveranskedjan för humanoida robotar kan bli ett viktigt område för investeringar och innovation. Detta skulle potentiellt kunna leda till framväxten av nya tillverkare av specialiserade komponenter eller vertikal integration av ledande robot-OEM-tillverkare. Massproduktion av humanoider kräver en tillförlitlig leverans av många specialiserade delar. Om befintliga leveranskedjor för dessa delar (t.ex. precisionsskruvar) inte kan möta den ökande efterfrågan kommer detta att begränsa den totala produktionen av humanoider. Detta skapar en möjlighet för nya företag att komma in på marknaden som komponentleverantörer, eller för stora aktörer som Tesla att vertikalt integrera mer komponenttillverkning för att säkerställa leverans och kontrollera kostnaderna.
- Integrering i befintliga arbetsflöden: Att anpassa robotar till befintliga människocentrerade miljöer och arbetsflöden utan större kostsamma modifieringar är nödvändigt.
- Allmänhetens acceptans och förtroende: Samhällets oro gällande arbetsförluster, säkerhet, dataskydd och den allmänna närvaron av människoliknande maskiner måste övervinnas.
- Regelmässiga och standardiseringshinder: Det saknas tydliga, globalt harmoniserade regler och säkerhetsstandarder för avancerade autonoma humanoider.
Viktiga tekniska och kommersiella utmaningar inom humanoid robotik
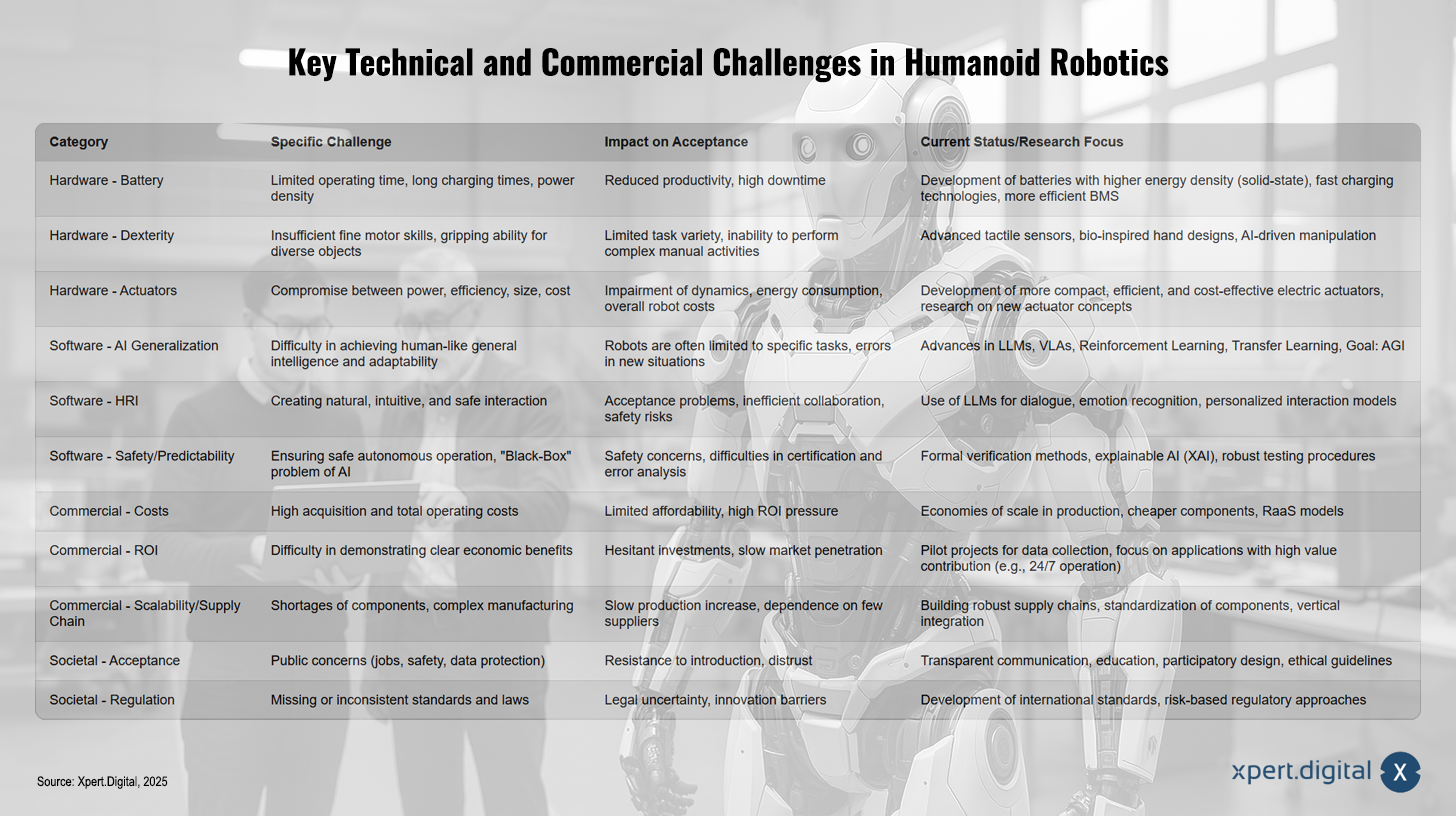
Viktiga tekniska och kommersiella utmaningar inom humanoid robotik – Bild: Xpert.Digital
Viktiga tekniska och kommersiella utmaningar inom humanoid robotik omfattar olika kategorier, som var och en medför specifika problem och påverkar teknikens acceptans. Hårdvarurelaterade utmaningar inkluderar begränsad batteritid och långa laddningstider, vilket minskar produktiviteten och leder till betydande driftstopp. Lösningar inkluderar utveckling av batterier med högre energitäthet och snabbladdningstekniker. Ett annat problem är otillräcklig finmotorik och gripförmåga, vilket begränsar utbudet av uppgifter som kan utföras. Framsteg inom taktila sensorer och bioinspirerade handdesigner erbjuder potentiella lösningar här. Ställdon står också inför utmaningen att balansera prestanda, effektivitet, storlek och kostnad, vilket påverkar dynamik och energiförbrukning. Nya koncept och mer kompakta ställdon är för närvarande under utveckling.
På mjukvarusidan ligger ett stort hinder i generaliseringen av artificiell intelligens (AI), eftersom människolik intelligens och anpassningsförmåga är svåra att uppnå. Brist på flexibilitet begränsar robotar till specifika uppgifter. Framsteg inom områden som förstärkningsinlärning och överföringsinlärning syftar till att ta itu med dessa problem. För att möjliggöra naturliga, intuitiva och säkra interaktioner mellan människa och robot (MRI) främjas användningen av AI-modeller som styr dialoger och känner igen känslor. Samtidigt är säkerhet och förutsägbarhet i autonoma system angelägna frågor, eftersom det så kallade "svarta lådan"-problemet med AI skapar både säkerhetsproblem och certifieringsutmaningar. Förklarbar AI och robusta testmetoder är avgörande i detta avseende.
Inom den kommersiella sektorn utgör höga anskaffningskostnader och svårigheten att visa en tydlig avkastning på investeringen (ROI) betydande hinder. Dessa problem hindrar investeringar och marknadspenetration. Lösningar kan inkludera mer prisvärda komponenter, pilotprojekt för värdeanalys och robotik-som-en-tjänst (RaaS)-modeller. Skalbarhets- och leveranskedjeproblem, orsakade av flaskhalsar i komponenter och komplexa tillverkningsprocesser, komplicerar snabba produktionsökningar. Robusta leveranskedjor och komponentstandardisering är viktiga mål i detta sammanhang.
Samhällets oro kring förlorade arbetstillfällen, säkerhet och dataskydd påverkar allmänhetens acceptans. Transparent kommunikation, utbildning och etiska riktlinjer kan bidra till att minska fördomar. På liknande sätt utgör bristen på eller inkonsekvent reglering ett problem, vilket leder till rättslig osäkerhet och hindrar innovation. Internationella standarder och riskbaserade regleringsmetoder är därför nödvändiga för att skapa rättsliga ramar som håller jämna steg med den tekniska utvecklingen.
Etiska, samhälleliga och styrningsmässiga konsekvenser
Den pågående utvecklingen och den ökande förekomsten av humanoida robotar väcker djupa etiska, samhälleliga och regulatoriska frågor. Dessa sträcker sig från effekterna på arbetsmarknaden och säkerheten till dataskydd, ansvarsskyldighet och det grundläggande förhållandet mellan människor och maskiner. Den etiska debatten skiftar alltmer från huruvida vi kan bygga dem till hur vi ska integrera dem på ett ansvarsfullt sätt. Detta innebär ett växande erkännande av deras förestående ankomst och behovet av proaktiv, snarare än reaktiv, styrning. Tidigare etiska diskussioner var ofta spekulativa. Med pilotprojekt och snabba framsteg inom AI blir frågorna nu mer praktiska och brådskande. Källor som [källa 1] och [källa 2] diskuterar konkreta frågor som ansvarsskyldighet, partiskhet och dataskydd i samband med utplacerbara system. Denna förändring indikerar en mognad av området och ett samhälleligt engagemang med kortsiktiga konsekvenser.
Kärnan i etiska frågor
- Jobbförflyttning och ekonomisk påverkan: Automatisering av uppgifter som tidigare utfördes av människor kan leda till arbetslöshet eller lönestagnation, särskilt i lågkvalificerade sektorer. Detta kräver omskolningsprogram och sociala skyddsnät.
- Säkerhet och trygghet: Den fysiska säkerheten för människor som interagerar med kraftfulla, autonoma robotar är av största vikt. Detta förvärras av cybersäkerhetsrisker och sårbarhet för attacker.
- Integritet och övervakning: Insamling av data av robotar utrustade med avancerade sensorer (kameror, mikrofoner) i hem, på arbetsplatser och i offentliga utrymmen väcker betydande farhågor gällande dataskydd. Biometrisk spårning, ansiktsigenkänning och rörelseanalys är särskilt viktiga.
- Autonomi, ansvar och ansvarsskyldighet: Att fastställa ansvar när autonoma robotar orsakar skada eller gör misstag är komplext. Den "svarta lådan"-karaktären hos AI-beslutsfattande komplicerar saken ytterligare.
- Partiskhet: AI-system kan anta och vidmakthålla partiskhet från utbildningsdata, vilket kan leda till orättvis eller diskriminerande behandling inom områden som hälso- och sjukvård eller anställning.
- Etik i människa-robotinteraktion (MRI):
- Bedrägeri och antropomorfism: Robotar som verkar människoliknande eller visar känslor kan vilseleda användare eller skapa ohälsosamma anknytningar.
- Känslomässigt beroende: Det finns en risk för överdrivet beroende av robotar som sällskap eller för emotionellt stöd, särskilt bland utsatta grupper (äldre, barn).
- Ersätter mänsklig interaktion: Det finns farhågor om att robotar kan minska verklig mänsklig kontakt.
Utvecklingen av etiska normer för humanoider kommer sannolikt att återspegla (och påverkas av) pågående debatter inom allmän AI-etik, men med den ökade komplexiteten av fysisk förkroppsligande. Denna fysiska närvaro väcker direkta säkerhets- och mänskligt ansvarsproblem som inte finns i rent mjukvarubaserad AI. Många etiska principer för AI (partiskhet, transparens, ansvarsskyldighet) gäller direkt för humanoider. Emellertid introducerar en humanoids fysiska närvaro och förmåga att interagera i världen unika risker (fysisk skada) och interaktionsdynamik (känslomässig bindning). Därför kräver etiken hos humanoida robotar ett specialiserat fokus som bygger på, men också utökar, allmän AI-etik.
Översikt över etiska och samhälleliga problem inom humanoid robotik
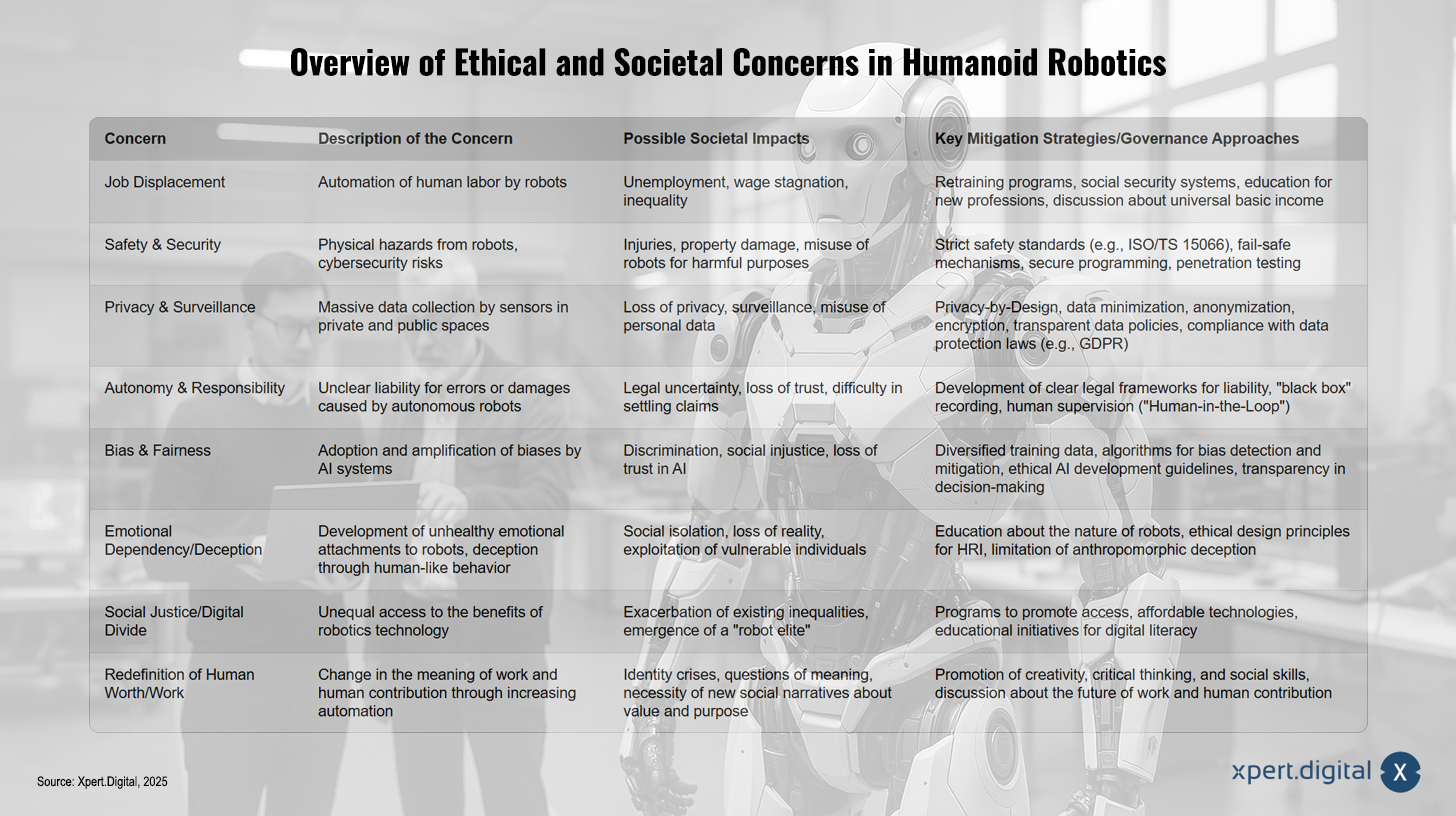
Översikt över etiska och samhälleliga problem inom humanoid robotik – Bild: Xpert.Digital
De etiska och samhälleliga farhågorna kring humanoid robotik kan delas in i flera kategorier. En viktig aspekt är den potentiella arbetsförflyttning som kan uppstå till följd av automatisering av mänskligt arbete av robotar. Detta kan leda till arbetslöshet, lönestagnation och ökande ojämlikhet. Föreslagna motåtgärder inkluderar omskolningsprogram, sociala skyddsnät, utbildningsinitiativ för nya yrken och diskussioner om en universell basinkomst. En annan oro är säkerhet, eftersom robotar kan utgöra fysiska faror eller missbrukas genom cybersäkerhetsrisker. För att förhindra skador, egendomsskador eller skadlig användning är stränga säkerhetsstandarder, felsäkra mekanismer, säker programmering och omfattande penetrationstester nödvändiga.
Frågor om integritet och övervakning blir allt viktigare på grund av den massiva datainsamlingen av robotsensorer, eftersom detta medför en förlust av integritet och risk för missbruk av personuppgifter. Skyddsåtgärder inkluderar inbyggd integritetsskydd (Privacy by Design), dataminimering, anonymisering, kryptering, transparenta datapolicyer och efterlevnad av dataskyddslagar som GDPR. Autonoma robotars autonomi och ansvar väcker frågor om ansvar vid fel eller skador, vilket kan leda till rättslig osäkerhet, förlorat förtroende och svårigheter vid skadereglering. Tydliga rättsliga ramar, "svarta lådor"-inspelningar och mänsklig tillsyn – även känd som "human-in-the-loop" – är avgörande.
Dessutom finns det oro kring partiskhet och rättvisa, eftersom AI-system kan anamma och förstärka fördomar, vilket potentiellt kan leda till diskriminering och social orättvisa. Strategier som tar itu med dessa inkluderar diversifierad träningsdata, dedikerade algoritmer för att upptäcka och mildra partiskhet, etiska riktlinjer för AI-utveckling och transparens i beslutsfattandet. Känslomässigt beroende eller bedrägeri från robotar utgör också ett problem, särskilt om de vilseleder människor genom människoliknande beteende och främjar känslomässiga band. Att öka medvetenheten om robotars sanna natur, etablera etiska designprinciper i människa-robotinteraktion (HRI) och begränsa antropomorfa bedrägeristrategier är avgörande i detta sammanhang.
Ytterligare samhällspåverkan gäller social rättvisa och den digitala klyftan, eftersom ojämlik tillgång till robotbaserad teknik kan förvärra befintliga ojämlikheter och skapa en "robotelit". Utbildningsinitiativ som främjar digital kompetens, program för att uppmuntra tillgång och prisvärd teknik är lämpliga motåtgärder. Slutligen placeras den framtida automatiseringen i ett sammanhang med att omdefiniera mänskligt värde och arbete. Detta kan utlösa identitetskriser och meningsfrågor, samtidigt som nya samhälleliga berättelser om värdet och syftet med mänsklig aktivitet blir nödvändiga. Att främja kreativitet, kritiskt tänkande och sociala färdigheter, samt att främja en öppen diskussion om arbetets framtid, är viktiga sätt att hantera dessa utmaningar.
Samhällspåverkan
- Framtidens arbete: Integreringen av humanoida robotar kommer att leda till en omvandling av arbetsroller, skapa nya yrken (t.ex. robotunderhåll, AI-programmering, etikansvariga) och understryka behovet av livslångt lärande. Samtidigt erbjuder det potential för betydande produktivitetsvinster och ekonomisk tillväxt.
- Social rättvisa och tillgänglighet: Det finns en risk att den digitala klyftan förvärras om tillgången till fördelaktig robotteknik är ojämlikt fördelad. Samtidigt erbjuder robotar potential att förbättra tillgängligheten för personer med funktionsnedsättning. En potentiell paradox framträder: Medan humanoider utvecklas för att lindra arbetskraftsbrist och ta över oönskade uppgifter, kan deras utbredda användning skapa nya former av social stratifiering baserad på tillgång till och kontroll över dessa tekniker. Detta kan fördjupa den digitala klyftan om den inte hanteras rättvist. Humanoider lovar att fylla arbetskraftsklyftor, men deras utveckling och implementering kräver betydande kapital och expertis. Om tillgången till dessa produktivitetshöjande verktyg förblir begränsad till rika nationer eller stora företag, kan det förvärra ekonomiska ojämlikheter globalt och inom samhällen. Att överbrygga den digitala klyftan blir ännu viktigare i den avancerade robotikens tidsålder.
- Allmänhetens uppfattning och förtroende: Att bygga upp allmänhetens förtroende är avgörande för acceptans. Transparens i dataanvändning, tydlig kommunikation och att hantera säkerhets- och integritetsfrågor är avgörande för detta. Kulturella skillnader i förväntningar på HRI och acceptans av robotar spelar också en roll.
- Omdefiniering av mänskligt värde och syfte: I takt med att robotar tar på sig fler uppgifter kommer samhälleliga diskussioner om värdet av mänskligt arbete, kreativitet och sociala relationer att intensifieras.
Styrning och reglering
Robusta juridiska och etiska ramverk behövs för att vägleda utvecklingen och driftsättningen av humanoida robotar. Befintliga internationella säkerhetsstandarder (t.ex. ISO/TS 15066 för samarbetande robotar) måste vidareutvecklas för avancerade humanoider. Principer som transparens, rättvisa, ansvarsskyldighet, mänsklig tillsyn och principen om icke-skadlighet är avgörande. Principer för inbyggd integritet och dataskyddsförordningar (t.ex. GDPR) är relevanta. Att skapa globalt harmoniserade regler är utmanande på grund av olika kulturella värderingar och prioriteringar. EU:s AI-lag fungerar som ett exempel på riskbaserad reglering.
Från fabriksgolvet till vardagsrummet: Humanoider i föränderliga användningsområden – Färdplan (2025-2035 och framåt)
De kommande åren och decennierna lovar kontinuerlig och accelererad utveckling inom humanoid robotteknik, driven av tekniska genombrott och växande marknadsacceptans. Färdplanen för ett brett införande är dock inte linjär utan kommer sannolikt att innebära cykler av hype, desillusionering och slutligen produktivitet (analogt med Gartners hypecykel). Olika tillämpningar kommer att mogna i olika takt. Tidiga framgångar i strukturerade industriella miljöer kommer att vara avgörande för att säkra finansiering och hållbar forskning och utveckling för mer komplexa, ostrukturerade tillämpningar. Gartner placerar för närvarande humanoider som "innovationsutlösare", och Forrester noterar deras snabba ökning i betydelse. Historiskt teknikantagande följer ofta sådana cykler. Initiala industriella implementeringar (fordon, logistik) kommer att ge avgörande validering och intäkter. Om dessa tidiga tillämpningar uppfyller avkastningsförväntningarna kommer detta att driva ytterligare investeringar som krävs för att hantera de mer utmanande inhemska eller mycket interaktiva miljöer som ligger längre fram i tidsramen.
Nästa generations teknologier
- Sensorer: Kontinuerliga framsteg förväntas inom visuella system (högre upplösning, bättre AI-bearbetning), taktila sensorer (högre känslighet, hållbarhet, kostnadseffektivitet) och proprioception. Multimodal sensorfusion kommer att spela en nyckelroll.
- Ställdon: Mer energieffektiva, kompakta och responsiva elektriska ställdon utvecklas. Potentiella genombrott inom mjuka robotiska ställdon kan leda till mer kompatibla och säkrare HRI:er.
- Material: Lättare, starkare och mer hållbara material är under utveckling. Självläkande material och material med inbyggda sensorfunktioner hamnar också i fokus.
- Energisystem: Batterier med högre energitäthet (t.ex. solid-state-batterier), snabbare laddningstider och förbättrade batterihanteringssystem (BMS) är avgörande för längre driftstider och ökad säkerhet.
- AI och generell intelligens: Framsteg mot artificiell generell intelligens (AGI) kommer att göra det möjligt för robotar att lära sig mer komplexa uppgifter med mindre data, tänka abstrakt, förstå sammanhang på djupet och visa sunt förnuft. Virtuella inlärningsområden (VLA) och multimodala modeller kommer att bli mer sofistikerade. Den långsiktiga visionen för AGI hos humanoider kommer att kräva ett grundläggande omprövning av relationerna mellan människa och AI och potentiellt leda till nya former av samarbete, samberoende och till och med samhällsstrukturer som är svåra att förutsäga ur dagens perspektiv. AGI innebär robotar med människoliknande lärande och resonemang. När humanoider uppnår detta kommer de att bli mer än bara verktyg; de kommer att bli partners eller till och med autonoma agenter. Detta väcker djupa frågor om deras roll i samhället, deras beslutsfattande befogenheter och karaktären av "arbete" och "intelligens". De nödvändiga samhällsanpassningarna skulle vara betydligt mer omfattande än de för nuvarande snäva AI-tillämpningar.
Prognostiserade milstolpar och tidslinjer för utrullningen
- Kortsiktigt (2025-2027):
- Pilotprojekt ökar inom fordons- och logistikindustrin. Tesla och BYD planerar att driftsätta tusentals enheter under 2025–2026.
- Första kommersiella lanseringen för specifika, tydligt definierade uppgifter inom dessa sektorer.
- Fokusera på att förbättra tillförlitligheten, minska kostnaderna och visa tydlig avkastning på investeringen i industriella miljöer.
- Användningen av humanoider inom logistik förväntas ta fart under 2026–2027.
- Medellång sikt (2028-2033):
- Utökning till mer komplexa uppgifter i industriella miljöer.
- Bredare acceptans i andra kommersiella servicemiljöer (detaljhandel, hotell- och restaurangbranschen) och specialiserade roller inom hälso- och sjukvården.
- Mognad av RaaS-modeller, vilket ökar tillgängligheten.
- Betydande förbättringar av fingerfärdighet, batteritid och AI-funktioner.
- Möjlighet till begränsad, övervakad användning i hemmet/personlig assistans för specifika uppgifter.
- Långsiktigt (2034-2040+):
- Utbredd användning i många branscher och potentiellt i privata hushåll för allmänna assistansuppgifter.
- Humanoida robotar som kan fatta mer autonoma beslut och arbeta i mycket ostrukturerade miljöer.
- Närmare integration i det mänskliga samhället, vilket potentiellt kan leda till betydande förändringar av arbetsmarknaden och en omdefiniering av arbete.
- Morgan Stanley förutspår 8 miljoner arbetande humanoider i USA år 2040 och 63 miljoner år 2050.
Transformativ potential och långsiktig vision
Humanoida robotar ses som universella verktyg som kan öka mänskliga förmågor inom nästan alla sektorer. De har potential att ta itu med stora samhällsutmaningar som arbetskraftsbrist, åldrande befolkningar och farligt arbete, och att förbättra livskvaliteten. Många ser "iPhone-ögonblicket" för robotik som att det har kommit, vilket leder till massanvändning och en ny era av samarbete mellan människa och maskin. Den ekonomiska potentialen är enorm, med utsikter till ökad produktivitet och BNP-tillväxt. Den långsiktiga visionen inkluderar robotar som är sömlöst integrerade i vardagen, utför ett brett spektrum av uppgifter och interagerar naturligt med människor. Utvecklingen av "allmänna humanoider" är strävan efter ett "universellt fysiskt gränssnitt". Om detta uppnås skulle detta kunna vara en handelsvara för många former av fysiskt arbete och specialiserad robothårdvara, ungefär som allmänt användande datorer har kommersialiserat specialiserade datormaskiner. Målet är en robot som kan utföra många uppgifter. Om en enda humanoidplattform, genom avancerad AI och anpassningsbar hårdvara, kan utföra uppgifter som för närvarande kräver flera specialiserade robotar eller mänskliga arbetare, representerar detta ett paradigmskifte. Denna ”universalitet” skulle kunna leda till stordriftsfördelar i produktionen och avsevärt minska behovet av olika typer av specialiserad automationsutrustning, vilket i grunden omvandlar robotmarknaden och arbetsmarknaden.
Relaterat till detta:

Från science fiction till verklighet: De människoliknande robotarnas era börjar
Humanoid robotik befinner sig i en avgörande tidpunkt i sin utveckling. Drivna av betydande framsteg inom artificiell intelligens, förbättrade hårdvarukomponenter och en växande marknadsefterfrågan, utvecklas dessa humanoida maskiner från att vara rena forskningsobjekt till konkreta lösningar för verkliga problem inom industri, sjukvård och andra områden. Visionen om robotar som sömlöst samarbetar med människor och utför uppgifter i mänskligt utformade miljöer närmar sig verkligheten.
Analysen har visat att de tekniska grunderna, särskilt inom områdena ställdon, sensorer, strömförsörjning och AI-baserad styrning, utvecklas snabbt. Samtidigt fortsätter komplexiteten i att replikera mänsklig fingerfärdighet och intelligens, de höga kostnaderna, produktionens skalbarhet och att säkerställa säkerhet och tillförlitlighet att utgöra betydande utmaningar. Marknaden uppvisar enorm tillväxtpotential, vilket framgår av många prognoser, men hastigheten för ett brett kommersiellt införande kommer att bero på hur effektivt dessa hinder övervinns.
De etiska och samhälleliga konsekvenserna är djupgående och kräver proaktivt engagemang. Frågor om arbetslöshet, dataskydd, ansvar och säkerhet måste tas upp, liksom de mer subtila aspekterna av interaktion mellan människa och robot och allmänhetens acceptans. Ansvarsfull innovation baserad på brett samarbete mellan industri, akademi, regering och allmänheten, tillsammans med framåtblickande styrning, är avgörande för att säkerställa att utvecklingen och användningen av humanoida robotar tjänar det gemensamma bästa.
Sammanfattningsvis har humanoida robotar potential att djupgående förändra arbete, samhälle och vardagsliv under de kommande decennierna. Även om vägen från science fiction till vardagsverklighet fortfarande är kantad av utmaningar, är framstegen obestridlig. En framgångsrik integration av dessa tekniker kommer att kräva en balans mellan teknisk ambition, ekonomisk bärkraft och etiskt ansvar. De kommande åren kommer att vara avgörande för att avgöra om och hur denna transformativa potential kan förverkligas fullt ut, där övergången från specialiserade tillämpningar till mer generella funktioner representerar en viktig milstolpe.
Vi finns här för dig - Konsulttjänster - Planering - Implementering - Projektledning
☑️ Stöd till små och medelstora företag inom strategi, konsultation, planering och implementering
☑️ Skapande eller omstrukturering av den digitala strategin och digitaliseringen
☑️ Utökning och optimering av internationella säljprocesser
☑️ Globala och digitala B2B-handelsplattformar
☑️ Pionjär inom affärsutveckling

Konrad Wolfenstein
Jag skulle gärna fungera som din personliga rådgivare.
Du kan kontakta mig genom att fylla i kontaktformuläret nedan eller helt enkelt ringa mig på +49 89 89 674 804 (München) .
Jag ser fram emot vårt gemensamma projekt.
Skriv till mig

Xpert.Digital - Konrad Wolfenstein
Xpert.Digital är ett nav för industrin med fokus på digitalisering, maskinteknik, logistik/intralogistik och solceller.
Med vår 360° affärsutvecklingslösning stödjer vi välrenommerade företag från nya affärer till eftermarknadsförsäljning.
Marknadsinformation, smarketing, marknadsautomation, innehållsutveckling, PR, utskick, personliga sociala medier och lead nurturing är en del av våra digitala verktyg.
Du hittar mer information på: www.xpert.digital - www.xpert.solar - www.xpert.plus
Håll kontakten


















