Robótica tátil: Robôs com sentido do tato: A nova geração da pesquisa Vulcan e MIT sobre reconhecimento háptico de objetos – Imagem: Xpert.Digital
Sistema de reconhecimento de objetos do MIT sem sensores especiais e o robô Vulcan da Amazon
Percepção háptica para máquinas: Definindo novos padrões no reconhecimento de objetos
No campo da robótica, o desenvolvimento de sensores táteis e sistemas de reconhecimento representa um avanço crucial, permitindo que as máquinas, pela primeira vez, não apenas vejam o ambiente ao seu redor, mas também o "sintam". Esse desenvolvimento é exemplificado pelo novo robô Vulcan da Amazon e pelo inovador sistema de reconhecimento de objetos do MIT. Ambas as tecnologias expandem significativamente as aplicações dos robôs e possibilitam tarefas que antes só podiam ser realizadas por humanos com sua percepção háptica natural.
Relacionado a isto:


Robô Vulcan da Amazon: um avanço no campo da preensão tátil em robôs
Funcionamento e fundamentos tecnológicos
O robô Vulcan, desenvolvido pela Amazon, representa um avanço tecnológico significativo no campo da inteligência artificial física. A própria Amazon descreve o desenvolvimento como um "avanço na robótica e na IA física". O sistema consiste em dois componentes principais: "Armazenar" para guardar objetos e "Pegar" para retirá-los. Sua característica mais marcante é a capacidade de perceber o ambiente ao seu redor por meio do tato.
A base tecnológica das habilidades táteis do Vulcan consiste em sensores especiais de força e torque, com formato semelhante a um disco de hóquei, que permitem ao robô "sentir" quanta força pode aplicar para agarrar um objeto sem danificá-lo. Adam Parness, Diretor de IA para Robótica da Amazon, enfatiza a singularidade dessa abordagem: "Vulcan não é o nosso primeiro robô capaz de mover objetos. Mas, com seu sentido de tato — sua capacidade de entender quando e como entra em contato com um objeto — ele abre novas possibilidades para otimizar fluxos de trabalho e instalações.".
Para organizar os itens nas prateleiras, Vulcan usa uma ferramenta semelhante a uma régua acoplada a uma chapinha de cabelo. Com essa "régua", ele empurra outros itens para o lado, abrindo espaço para os novos. Os braços robóticos ajustam a força de preensão de acordo com o tamanho e o formato do item, enquanto esteiras transportadoras integradas o movem para dentro do contêiner. Para retirar os itens, Vulcan usa uma garra de sucção em conjunto com um sistema de câmeras.
Áreas atuais de aplicação e desempenho
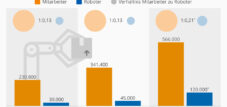
O robô Vulcan está sendo testado atualmente em dois centros de distribuição da Amazon: em Winsen, perto de Hamburgo (Alemanha) e em Spokane, Washington (EUA). Em Washington, seis robôs Vulcan Stow estão em operação e já armazenaram com sucesso meio milhão de itens. Em Winsen, dois robôs Vulcan Pick estão trabalhando e já processaram 50.000 pedidos.
As capacidades do sistema são notáveis: o Vulcan consegue atualmente manipular aproximadamente 75% dos milhões de produtos oferecidos pela Amazon. O menor objeto que o robô consegue manipular tem aproximadamente o tamanho de um batom ou de um pen drive. Particularmente impressionante é a capacidade do robô de identificar objetos em tempo real, já que seria "impossível para ele saber de cor todas as especificações dos itens", como explica Parness.
Planos futuros e integração na cadeia logística
A Amazon planeja aumentar significativamente o número de robôs Vulcan nos próximos anos. Este ano, a previsão é de que o número de Vulcans em Winsen chegue a 60 e em Washington a 50. O plano a longo prazo é implantar os robôs em centros de logística por toda a Europa e nos EUA.
Um aspecto fundamental da estratégia da Amazon é a coexistência de humanos e máquinas. O "plano diretor" da empresa prevê que humanos e máquinas trabalhem lado a lado. Os robôs são destinados principalmente a manusear os produtos nas prateleiras que os humanos não conseguem alcançar sem uma escada ou que exigiriam que eles se curvassem excessivamente. Espera-se que isso leve a uma maior eficiência geral, reduzindo simultaneamente a carga de trabalho dos funcionários humanos.
Sistema de detecção de objetos do MIT por meio de manipulação: "Detecção" inteligente sem sensores especiais
Abordagem inovadora para reconhecimento de objetos
Paralelamente ao Vulcan da Amazon, pesquisadores do MIT, da Amazon Robotics e da Universidade da Colúmbia Britânica desenvolveram um sistema que adota uma abordagem diferente para conferir habilidades hápticas aos robôs. Essa tecnologia permite que os robôs reconheçam propriedades de um objeto, como peso, maciez ou conteúdo, simplesmente pegando-o e sacudindo-o suavemente — assim como os humanos fazem ao manusear objetos desconhecidos.
O diferencial dessa abordagem é que ela não requer sensores táteis especiais. Em vez disso, o sistema utiliza os encoders de articulação já presentes na maioria dos robôs – sensores que detectam a posição e a velocidade de rotação das articulações durante o movimento. Peter Yichen Chen, pós-doutorando do MIT e principal autor do artigo científico, explica a visão por trás do projeto: “Meu sonho seria enviar robôs para o mundo para que eles pudessem tocar e mover objetos e descobrir, de forma independente, as propriedades de tudo com que interagissem.”.
Funcionalidade técnica e modelos de simulação
O núcleo do sistema do MIT consiste em dois modelos de simulação: um que simula o robô e seus movimentos, e outro que replica a dinâmica do objeto. Chao Liu, outro pós-doutorando do MIT, enfatiza a importância desses gêmeos digitais: "Uma réplica digital precisa do mundo real é realmente importante para o sucesso do nosso método.".
O sistema utiliza uma técnica chamada “simulação diferenciável”, que permite ao algoritmo prever como pequenas alterações nas propriedades de um objeto, como massa ou maciez, afetarão a posição final das articulações do robô. Assim que a simulação corresponde aos movimentos reais do robô, o sistema identifica as propriedades corretas do objeto.
Uma das principais vantagens desse método é sua eficiência: o algoritmo consegue realizar os cálculos em segundos e requer apenas uma trajetória de movimento real do robô para funcionar. Isso torna o sistema particularmente econômico e prático para aplicações no mundo real.
Potencial de aplicação e benefícios
A tecnologia desenvolvida poderá ser particularmente útil em aplicações onde as câmeras são menos eficazes, como na triagem de objetos em um porão escuro ou na remoção de escombros em um prédio parcialmente desabado após um terremoto.
Como o algoritmo não exige um grande conjunto de dados para treinamento, ao contrário de alguns métodos que dependem de visão computacional ou sensores externos, ele é menos propenso a erros quando confrontado com ambientes desconhecidos ou novos objetos. Isso torna o sistema particularmente robusto e versátil.
O panorama geral da pesquisa sobre sensores táteis em robótica
Desafios fundamentais e soluções atuais
O desenvolvimento de robôs com tato apresenta desafios fundamentais para os pesquisadores. Embora o sistema tátil humano seja extremamente complexo e cheio de nuances, os sistemas artificiais precisam replicá-lo por meios tecnológicos. Ken Goldberg, especialista em robótica da Universidade da Califórnia, Berkeley, enfatiza a complexidade dessa tarefa: “O tato humano é incrivelmente complexo e cheio de nuances, com uma vasta gama dinâmica. Embora os robôs estejam progredindo rapidamente, eu ficaria surpreso se víssemos sensores táteis com capacidade semelhante à humana nos próximos cinco a dez anos.”.
Apesar desses desafios, progressos significativos estão sendo feitos na pesquisa. Por exemplo, o Fraunhofer IFF está desenvolvendo sistemas de sensores táteis que permitem a preensão reativa, imitando a mão humana, e são ideais para o manuseio de objetos frágeis ou flexíveis. Os dados dos sensores são usados para adaptação da garra, reconhecimento de componentes e posições e monitoramento de processos.
Projetos de pesquisa inovadores na área da robótica tátil
Além dos desenvolvimentos da Amazon e do MIT, existem outros projetos de pesquisa significativos na área de sensores táteis para robôs:
O Instituto Max Planck para Sistemas Inteligentes desenvolveu um sensor háptico chamado Insight que detecta o toque com alta sensibilidade. Georg Martius, chefe de um grupo de pesquisa do instituto, destaca o desempenho do sensor: "Nosso sensor demonstra um desempenho excepcional graças ao design mecânico inovador de sua carcaça, ao sistema de imagem personalizado em seu interior, à aquisição automática de dados e aos métodos de aprendizado profundo de última geração." O sensor é tão sensível que consegue até mesmo perceber sua própria orientação em relação à gravidade.
Outro projeto interessante é o DensePhysNet, um sistema que realiza ativamente uma sequência de interações dinâmicas (por exemplo, deslizamento e colisão) e usa um modelo preditivo profundo sobre suas observações visuais para aprender representações densas, pixel a pixel, que refletem as propriedades físicas dos objetos observados. Experimentos em simulações e em ambientes reais mostram que as representações aprendidas contêm informações físicas ricas e podem ser usadas diretamente para decodificar propriedades físicas de objetos, como atrito e massa.
Relacionado a isto:

Perspectivas futuras para sistemas robóticos táteis
Integração de sistemas de sensores multimodais
O futuro da robótica tátil reside na integração de diferentes modalidades sensoriais. Pesquisadores do MIT já estão trabalhando no ensino de inteligência artificial para combinar sentidos como visão e tato. Ao compreender como essas diferentes modalidades sensoriais interagem, os robôs podem desenvolver uma compreensão mais holística do ambiente ao seu redor.
A equipe do MIT já planeja combinar seu método de detecção de objetos com visão computacional para criar um sistema de sensores multimodais ainda mais poderoso. “Este trabalho não pretende substituir a visão computacional. Ambos os métodos têm suas vantagens e desvantagens. Mas aqui mostramos que já podemos descobrir algumas dessas propriedades mesmo sem uma câmera”, explica Chen.
Áreas de aplicação expandidas e desenvolvimentos futuros
A equipe de pesquisadores do MIT também quer explorar aplicações com sistemas robóticos mais complexos, como robôs flexíveis, e objetos mais complexos, incluindo líquidos em movimento ou materiais granulares como areia. A longo prazo, eles esperam usar essa técnica para aprimorar o aprendizado de robôs, permitindo que robôs futuros desenvolvam rapidamente novas habilidades de manipulação e se adaptem a mudanças em seu ambiente.
A Amazon planeja desenvolver e implantar ainda mais a tecnologia Vulcan em larga escala nos próximos anos. A integração do Vulcan com a frota existente da empresa, composta por 750.000 robôs móveis, sugere um conceito abrangente de automação que pode transformar fundamentalmente o setor de logística.
Aprendizagem tátil: quando sensores dão aos robôs a capacidade de sentir o tato
O desenvolvimento de robôs com tato, exemplificado pelo Vulcan da Amazon e pelo sistema de reconhecimento de objetos do MIT, marca um ponto de virada crucial na robótica. Essas tecnologias permitem que os robôs assumam tarefas que antes eram domínio exclusivo dos humanos, pois exigem habilidades motoras finas e compreensão tátil.
As diferentes abordagens – o foco da Amazon em sensores especializados e o conceito do MIT de usar sensores existentes para inferência háptica – demonstram a diversidade de linhas de pesquisa nessa área. Ambas as abordagens têm seus pontos fortes e áreas de aplicação específicas.
Com a crescente integração de capacidades táteis em sistemas robóticos, novas oportunidades se abrem para a automação de tarefas complexas em logística, manufatura, saúde e muitas outras áreas. A capacidade dos robôs não apenas de ver, mas também de "sentir" o ambiente ao seu redor, nos aproxima significativamente de um futuro em que robôs e humanos possam colaborar de forma ainda mais próxima e intuitiva.
Relacionado a isto: