Robotika taktil: Robot dengan indra peraba: Generasi baru dari Vulcan dan riset MIT tentang pengenalan objek haptik – Gambar: Xpert.Digital
Sistem pengenalan objek MIT tanpa sensor khusus dan robot Vulcan milik Amazon
Persepsi haptik untuk mesin: Menetapkan standar baru dalam pengenalan objek
Di bidang robotika, pengembangan sensor taktil dan sistem pengenalan menandai kemajuan penting, yang memungkinkan mesin untuk pertama kalinya tidak hanya melihat lingkungannya tetapi juga "merasakan"nya. Perkembangan ini dicontohkan oleh robot Vulcan baru dari Amazon dan sistem pengenalan objek inovatif dari MIT. Kedua teknologi ini secara signifikan memperluas aplikasi robot dan memungkinkan tugas-tugas yang sebelumnya hanya dapat dilakukan oleh manusia dengan persepsi haptik alami mereka.
Berkaitan dengan ini:


Robot Vulcan Amazon: Sebuah terobosan di bidang cengkeraman robot taktil
Fungsi dan landasan teknologi
Robot Vulcan, yang dikembangkan oleh Amazon, mewakili kemajuan teknologi yang signifikan di bidang kecerdasan buatan fisik. Amazon sendiri menggambarkan pengembangan ini sebagai "terobosan dalam robotika dan AI fisik." Sistem ini terdiri dari dua komponen utama: "Stow" untuk menyimpan objek dan "Pick" untuk mengambilnya. Fitur unggulannya adalah kemampuannya untuk merasakan lingkungannya secara taktil.
Dasar teknologi untuk kemampuan taktil Vulcan terdiri dari sensor gaya-torsi khusus, berbentuk seperti keping hoki, yang memungkinkan robot untuk "merasakan" seberapa besar gaya yang dapat diterapkannya untuk menggenggam suatu objek tanpa merusaknya. Adam Parness, Direktur Robotika AI di Amazon, menekankan keunikan pendekatan ini: "Vulcan bukanlah robot pertama kami yang dapat memindahkan objek. Tetapi dengan indra sentuhannya—kemampuannya untuk memahami kapan dan bagaimana ia bersentuhan dengan suatu objek—ia membuka kemungkinan baru untuk mengoptimalkan alur kerja dan fasilitas.".
Untuk menyusun barang-barang di rak, Vulcan menggunakan alat yang menyerupai penggaris yang terpasang pada alat pelurus rambut. Dengan "penggaris" ini, ia mendorong barang-barang lain ke samping untuk memberi ruang bagi barang-barang baru. Lengan penjepit menyesuaikan kekuatan cengkeramannya tergantung pada ukuran dan bentuk barang, sementara sabuk konveyor terintegrasi memindahkan barang ke dalam wadah. Untuk mengambil barang, Vulcan menggunakan penjepit hisap yang dikombinasikan dengan sistem kamera.
Bidang aplikasi dan kinerja saat ini
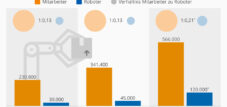
Robot Vulcan saat ini sedang diuji di dua pusat logistik Amazon: di Winsen dekat Hamburg (Jerman) dan di Spokane, Washington (AS). Di Washington, enam robot Stow Vulcan beroperasi dan telah berhasil menyimpan setengah juta barang. Di Winsen, dua robot Pick Vulcan bekerja dan telah memproses 50.000 pesanan.
Kemampuan sistem ini luar biasa: Vulcan saat ini dapat menangani sekitar 75 persen dari jutaan produk yang ditawarkan oleh Amazon. Objek terkecil yang dapat dimanipulasi robot ini kira-kira seukuran lipstik atau USB flash drive. Yang sangat mengesankan adalah kemampuan robot untuk mengidentifikasi objek secara real-time, karena "mustahil baginya untuk mengetahui semua detail spesifik barang-barang tersebut secara hafalan," seperti yang dijelaskan Parness.
Rencana masa depan dan integrasi ke dalam rantai logistik
Amazon berencana untuk meningkatkan jumlah robot Vulcan secara signifikan dalam beberapa tahun mendatang. Tahun ini, jumlah Vulcan di Winsen diperkirakan akan meningkat menjadi 60 dan di Washington menjadi 50. Rencana jangka panjangnya adalah untuk mengerahkan robot-robot tersebut di pusat-pusat logistik di seluruh Eropa dan AS.
Aspek kunci dari strategi Amazon adalah koeksistensi manusia dan mesin. "Rencana induk" perusahaan membayangkan manusia dan mesin bekerja berdampingan. Robot terutama ditujukan untuk menangani produk-produk di rak yang tidak dapat dijangkau manusia tanpa tangga atau yang membutuhkan banyak membungkuk. Hal ini diharapkan dapat meningkatkan efisiensi secara keseluruhan sekaligus mengurangi beban kerja karyawan manusia.
Sistem deteksi objek MIT melalui penanganan: "Penginderaan" cerdas tanpa sensor khusus
Pendekatan inovatif untuk pengenalan objek
Sejalan dengan Vulcan milik Amazon, para peneliti dari MIT, Amazon Robotics, dan Universitas British Columbia telah mengembangkan sistem yang mengambil pendekatan berbeda untuk memberikan kemampuan haptik pada robot. Teknologi ini memungkinkan robot untuk mengenali sifat-sifat suatu objek, seperti berat, kelembutan, atau isi, hanya dengan mengambilnya dan menggoyangkannya perlahan—mirip dengan cara manusia saat menangani objek yang tidak dikenal.
Yang istimewa dari pendekatan ini adalah tidak diperlukan sensor taktil khusus. Sebaliknya, sistem ini menggunakan encoder sendi yang sudah ada di sebagian besar robot – sensor yang mendeteksi posisi dan kecepatan rotasi sendi selama pergerakan. Peter Yichen Chen, seorang peneliti pascadoktoral MIT dan penulis utama makalah penelitian ini, menjelaskan visi di balik proyek tersebut: “Impian saya adalah mengirim robot ke dunia luar sehingga mereka dapat menyentuh dan memindahkan benda-benda serta secara mandiri menemukan sifat-sifat dari segala sesuatu yang berinteraksi dengan mereka.”.
Fungsionalitas teknis dan model simulasi
Inti dari sistem MIT terdiri dari dua model simulasi: satu yang mensimulasikan robot dan pergerakannya, dan satu yang mereplikasi dinamika objek. Chao Liu, seorang peneliti pascadoktoral MIT lainnya, menekankan pentingnya kembaran digital ini: “Replika digital yang akurat dari dunia nyata sangat penting untuk keberhasilan metode kami.”.
Sistem ini menggunakan teknik yang disebut "simulasi diferensiabel," yang memungkinkan algoritma untuk memprediksi bagaimana perubahan kecil pada sifat-sifat suatu objek, seperti massa atau kelembutan, akan memengaruhi posisi akhir sendi robot. Setelah simulasi sesuai dengan gerakan aktual robot, sistem telah mengidentifikasi sifat-sifat objek yang benar.
Keunggulan utama metode ini adalah efisiensinya: Algoritma dapat melakukan perhitungan dalam hitungan detik dan hanya membutuhkan lintasan gerak robot di dunia nyata untuk berfungsi. Hal ini membuat sistem ini sangat hemat biaya dan praktis untuk aplikasi di dunia nyata.
Potensi dan manfaat aplikasi
Teknologi yang dikembangkan ini dapat sangat berguna dalam aplikasi di mana kamera kurang efektif, seperti memilah benda di ruang bawah tanah yang gelap atau membersihkan puing-puing di bangunan yang sebagian runtuh setelah gempa bumi.
Karena algoritma ini tidak memerlukan kumpulan data yang besar untuk pelatihan, tidak seperti beberapa metode yang bergantung pada penglihatan komputer atau sensor eksternal, algoritma ini kurang rentan terhadap kesalahan ketika dihadapkan dengan lingkungan yang tidak dikenal atau objek baru. Hal ini membuat sistem ini sangat tangguh dan serbaguna.
Gambaran umum penelitian tentang sensor taktil dalam robotika
Tantangan mendasar dan solusi terkini
Pengembangan robot dengan indra peraba menghadirkan tantangan mendasar bagi para peneliti. Meskipun sistem peraba manusia sangat kompleks dan bernuansa, sistem buatan harus mereplikasinya menggunakan sarana teknologi. Ken Goldberg, seorang ahli robotika di Universitas California, Berkeley, menekankan kompleksitas tugas ini: “Indra peraba manusia sangat bernuansa dan kompleks, dengan rentang dinamis yang luas. Meskipun robot mengalami kemajuan pesat, saya akan terkejut jika melihat sensor peraba pada tingkat manusia dalam lima hingga sepuluh tahun ke depan.”.
Terlepas dari tantangan-tantangan ini, kemajuan signifikan sedang dicapai dalam penelitian. Misalnya, Fraunhofer IFF sedang mengembangkan sistem sensor taktil yang memungkinkan genggaman reaktif, meniru tangan manusia, dan ideal untuk menangani objek yang rapuh atau fleksibel. Data sensor digunakan untuk adaptasi penjepit, pengenalan komponen dan posisi, serta pemantauan proses.
Proyek penelitian inovatif di bidang robotika taktil
Selain pengembangan yang dilakukan oleh Amazon dan MIT, terdapat proyek penelitian penting lainnya di bidang sensor robot taktil:
Institut Max Planck untuk Sistem Cerdas telah mengembangkan sensor haptik bernama Insight yang mendeteksi sentuhan dengan sensitivitas tinggi. Georg Martius, kepala kelompok penelitian di institut tersebut, menekankan kinerja sensor: "Sensor kami menunjukkan kinerja luar biasa berkat desain mekanis inovatif dari casingnya, sistem pencitraan yang dirancang khusus di dalamnya, akuisisi data otomatis, dan metode pembelajaran mendalam yang mutakhir." Sensor ini sangat sensitif sehingga bahkan dapat merasakan orientasinya sendiri relatif terhadap gravitasi.
Proyek menarik lainnya adalah DensePhysNet, sebuah sistem yang secara aktif melakukan serangkaian interaksi dinamis (misalnya, meluncur dan bertabrakan) dan menggunakan model prediksi mendalam atas pengamatan visualnya untuk mempelajari representasi piksel demi piksel yang mencerminkan sifat fisik objek yang diamati. Eksperimen di lingkungan simulasi dan dunia nyata menunjukkan bahwa representasi yang dipelajari mengandung informasi fisik yang kaya dan dapat digunakan secara langsung untuk menguraikan sifat fisik objek seperti gesekan dan massa.
Berkaitan dengan ini:

Prospek masa depan untuk sistem robot taktil
Integrasi sistem sensor multimodal
Masa depan robotika taktil terletak pada integrasi berbagai modalitas sensorik. Para peneliti di MIT sudah berupaya mengajarkan kecerdasan buatan untuk menggabungkan indra seperti penglihatan dan sentuhan. Dengan memahami bagaimana berbagai modalitas sensorik ini berinteraksi, robot dapat mengembangkan pemahaman yang lebih holistik tentang lingkungannya.
Tim MIT sudah berencana untuk menggabungkan metode deteksi objek mereka dengan visi komputer untuk menciptakan sistem sensor multimodal yang lebih canggih. “Karya ini bukan untuk menggantikan visi komputer. Kedua metode tersebut memiliki kelebihan dan kekurangan masing-masing. Tetapi di sini kami telah menunjukkan bahwa kami sudah dapat menemukan beberapa sifat ini bahkan tanpa kamera,” jelas Chen.
Perluasan area aplikasi dan pengembangan di masa mendatang
Para peneliti tim MIT juga ingin mengeksplorasi aplikasi dengan sistem robot yang lebih kompleks, seperti robot lunak, dan objek yang lebih kompleks, termasuk cairan yang berguncang atau media granular seperti pasir. Dalam jangka panjang, mereka berharap dapat menggunakan teknik ini untuk meningkatkan pembelajaran robot, memungkinkan robot masa depan untuk dengan cepat mengembangkan keterampilan manipulasi baru dan beradaptasi dengan perubahan di lingkungannya.
Amazon berencana untuk mengembangkan dan menerapkan teknologi Vulcan dalam skala yang lebih besar di tahun-tahun mendatang. Integrasi Vulcan dengan armada robot bergerak perusahaan yang berjumlah 750.000 unit menunjukkan konsep otomatisasi komprehensif yang dapat secara fundamental mengubah industri logistik.
Pembelajaran taktil: Ketika sensor memberi robot kemampuan untuk merasakan sentuhan
Pengembangan robot dengan kemampuan sentuhan, yang dicontohkan oleh Vulcan milik Amazon dan sistem pengenalan objek milik MIT, menandai titik balik penting dalam bidang robotika. Teknologi ini memungkinkan robot untuk mengambil alih tugas-tugas yang sebelumnya hanya menjadi domain manusia, karena tugas-tugas tersebut membutuhkan keterampilan motorik halus dan pemahaman taktil.
Pendekatan yang berbeda – fokus Amazon pada sensor khusus dan konsep MIT dalam menggunakan sensor yang sudah ada untuk inferensi haptik – menunjukkan keragaman arah penelitian di bidang ini. Kedua pendekatan tersebut memiliki kekuatan dan area aplikasi spesifik masing-masing.
Dengan semakin terintegrasinya kemampuan taktil ke dalam sistem robotik, peluang baru terbuka untuk otomatisasi tugas-tugas kompleks di bidang logistik, manufaktur, perawatan kesehatan, dan banyak bidang lainnya. Kemampuan robot tidak hanya untuk melihat tetapi juga untuk "merasakan" lingkungannya membawa kita selangkah lebih dekat ke masa depan di mana robot dan manusia dapat berkolaborasi lebih erat dan intuitif.
Berkaitan dengan ini: