
Aktuell größte humanoide Robotik-Studie von Xpert.Digital – Marktboom voraus: Von Roboter-Prototypen zur Praxis
Xpert Pre-Release

Sprachauswahl 📢
Veröffentlicht am: 13. Mai 2025 / Update vom: 13. Mai 2025 – Verfasser: Konrad Wolfenstein

Aktuell größte humanoide Robotik-Studie von Xpert.Digital – Marktboom voraus: Von Roboter-Prototypen zur Praxis – Bild: Xpert.Digital
Humanoide Robotik: Der Schlüssel zu einer neuen industriellen Revolution? (Lesezeit: 52 min / Keine Werbung / Keine Paywall)
Für die Geschäftsleitung: Mismatch überwinden – Warum integrierte Strategien für Roboter führend sind
Die humanoide Robotik steht an einem Wendepunkt und vollzieht den Übergang von Forschungsprototypen zu ersten kommerziellen Implementierungen, insbesondere in industriellen Umgebungen. Diese rasante Entwicklung wird maßgeblich durch Fortschritte in der künstlichen Intelligenz (KI), insbesondere der verkörperten KI (Embodied AI), großen Sprachmodellen (Large Language Models, LLMs) und Vision-Language-Action-Modellen (VLAs), sowie durch Innovationen im Hardwarebereich vorangetrieben. Marktprognosen deuten auf ein erhebliches Wachstum hin, mit Schätzungen, die bis 2035 von 30 Milliarden US-Dollar bis über 200 Milliarden US-Dollar reichen. Die Anwendungsbereiche sind vielfältig und erstrecken sich von der Industrie über das Gesundheitswesen bis hin zu persönlichen Assistenzsystemen. Trotz des enormen Potenzials bestehen weiterhin signifikante Herausforderungen in Bereichen wie Batterietechnologie, manueller Geschicklichkeit (Dexterität), Kosteneffizienz, Skalierbarkeit und ethischer Governance. Die Konvergenz von sinkenden Hardwarekosten, sich verbessernder KI und zunehmendem Arbeitskräftemangel schafft eine Art “perfekten Sturm”, der die beschleunigte Einführung humanoider Roboter begünstigt. Dies könnte dazu führen, dass die Amortisation (Return on Investment, ROI) in gezielten industriellen Anwendungen schneller erreicht wird als von einigen konservativen Schätzungen vorhergesagt, was wiederum schnellere Adoptionszyklen in diesen Nischen zur Folge hätte. Unternehmen werden zunehmend Anreize haben, Automatisierungslösungen zu implementieren, und humanoide Roboter bieten aufgrund ihrer Vielseitigkeit eine anpassungsfähige Lösung für menschenzentrierte Umgebungen.
Der duale Fokus auf die Entwicklung universeller KI und hochspezialisierter Hardwarekomponenten (Aktuatoren, Sensoren) führt zu einer komplexen Wechselwirkung. Fortschritte in einem Bereich können durch Engpässe im anderen gebremst werden, was darauf hindeutet, dass ganzheitliche, integrierte Entwicklungsstrategien für Marktführer entscheidend sein werden. Eine hochentwickelte KI kann beispielsweise eine mangelhafte mechanische Geschicklichkeit oder eine begrenzte Betriebszeit aufgrund von Batterieengpässen nicht vollständig kompensieren. Umgekehrt kann fortschrittliche Hardware ohne ausreichend intelligente Software nicht ihr volles Potenzial entfalten. Unternehmen, die Hardware und KI gemeinsam entwickeln können, wie es beispielsweise bei Teslas vertikalem Integrationsansatz der Fall ist, könnten daher einen Wettbewerbsvorteil haben.
Dieses Jahrzehnt (2025-2035) verspricht, eine transformative Ära für humanoide Roboter einzuläuten, die das Potenzial haben, Arbeit, Gesellschaft und Alltag tiefgreifend zu verändern.
Passend dazu:

Technologische Durchbrüche: Wie humanoide Roboter unser Leben verändern
Die humanoide Robotik hat sich zu einem der dynamischsten und potenziell transformativsten Technologiefelder des 21. Jahrhunderts entwickelt. An der Schnittstelle von künstlicher Intelligenz, fortschrittlicher Mechanik, Elektronik und Materialwissenschaften stehend, versprechen humanoide Roboter, die Art und Weise, wie Menschen arbeiten, interagieren und leben, grundlegend zu verändern. Diese Studie bietet eine umfassende Analyse des aktuellen Stands, der historischen Entwicklung, der technologischen Grundlagen, der vielfältigen Anwendungen, der Marktlandschaft, der zentralen Herausforderungen und der zukünftigen Entwicklungsperspektiven humanoider Roboter mit einem besonderen Fokus auf den Zeitraum bis 2025 und darüber hinaus.
Definition des Humanoiden Roboters
Ein humanoider Roboter ist per Definition ein Roboter, der in seiner äußeren Form dem menschlichen Körper ähnelt und typischerweise über einen Rumpf, einen Kopf, zwei Arme und zwei Beine verfügt. Diese menschenähnliche Gestalt ist nicht nur ein ästhetisches Merkmal, sondern dient oft funktionalen Zwecken, wie der Interaktion mit Werkzeugen und Umgebungen, die für Menschen konzipiert wurden, oder experimentellen Zwecken, beispielsweise der Erforschung der zweibeinigen Fortbewegung (bipedale Lokomotion).
Akademische Definitionen gehen über die reine physische Ähnlichkeit hinaus und betonen, dass humanoide Roboter sorgfältig konstruiert werden, um nicht nur das menschliche Erscheinungsbild, sondern auch menschliches Verhalten nachzuahmen. Dies schließt die Replikation von Funktionen wie Wahrnehmung, Entscheidungsfindung und Interaktion ein. Aufgrund ihres anthropomorphen Designs bieten sie inhärente Vorteile in menschenzentrierten Umgebungen, da sie eine natürlichere Interaktion und eine höhere Anpassungsfähigkeit ermöglichen als andere Roboterformen. Die Fähigkeit, sich in für Menschen geschaffenen Räumen zu bewegen und mit für Menschen entwickelten Werkzeugen zu hantieren, ist ein Kernaspekt ihrer Funktionalität und ihres wachsenden Nutzens.
Die Definition von “humanoid” selbst unterliegt einer Evolution. Ursprünglich lag der Fokus stark auf der physischen Gestalt. Neuere akademische Betrachtungen und technologische Fortschritte verschieben diesen Fokus jedoch zunehmend auf die Nachahmung von Verhalten und kognitiven Funktionen. Diese Entwicklung wird maßgeblich durch die Fortschritte in der künstlichen Intelligenz vorangetrieben. Wenn humanoide Roboter nicht nur menschlich aussehen, sondern auch zunehmend menschenähnlich “handeln” und “schlussfolgern”, senkt dies zwar die Interaktionsbarrieren, wirft aber gleichzeitig tiefgreifendere ethische Fragen bezüglich Täuschung, emotionaler Bindung und der Natur von Intelligenz auf.
Signifikanz und Umfang der Studie
Die humanoide Robotik stellt eine kritische technologische Grenze dar und verkörpert die Konvergenz verschiedener wissenschaftlicher und technischer Disziplinen. Ihr Potenzial, Industrien zu revolutionieren, dem Arbeitskräftemangel entgegenzuwirken, bei gefährlichen Arbeiten zu assistieren und das tägliche Leben zu verbessern, ist immens. Der “funktionale Zweck” des humanoiden Designs – die Interaktion mit menschlichen Werkzeugen und Umgebungen – entwickelt sich zu einem primären wirtschaftlichen Treiber. Diese Anpassungsfähigkeit bedeutet, dass Unternehmen humanoide Roboter mit geringeren Störungen und Kapitalaufwendungen in bestehende Arbeitsabläufe integrieren können, als dies bei der Neugestaltung von Fabriken oder Lagerhäusern für spezialisierte Roboter der Fall wäre. Dieser inhärente Vorteil ist ein starkes Verkaufsargument, wie Pilotprogramme in der Automobilindustrie und Logistik zeigen, und wirkt als starker Katalysator für die Akzeptanz.
Diese Studie zielt darauf ab, eine umfassende Analyse des aktuellen Stands (ca. 2025), des historischen Kontexts, der technologischen Grundlagen, der Anwendungen, der Marktlandschaft, der Herausforderungen und der zukünftigen Entwicklungspfade der humanoiden Robotik zu liefern. Sie soll als fundierte Ressource für Forscher, Entwickler, politische Entscheidungsträger, Investoren und die breite Öffentlichkeit dienen, um die Komplexität und die weitreichenden Implikationen dieser aufstrebenden Technologie zu verstehen.
Historische Entwicklung der Humanoiden Robotik
Die Faszination für künstliche Wesen, die dem Menschen ähneln, reicht weit in die Geschichte zurück und hat die Entwicklung der humanoiden Robotik maßgeblich geprägt. Von antiken Mythen bis zu den heutigen hochentwickelten Maschinen spannt sich ein weiter Bogen des menschlichen Strebens, Intelligenz und Bewegung in menschenähnlicher Form zu replizieren.
Frühe Konzepte und Automaten
Die Idee menschenähnlicher künstlicher Wesen findet sich bereits in antiken Mythen wie denen von Hephaistos, der mechanische Diener erschuf, oder Pygmalion, dessen Statue zum Leben erwachte. Frühe mechanische Konstruktionen, sogenannte Automaten, zeugen von diesem frühen Interesse. Beispiele hierfür sind ägyptische Wasseruhren mit beweglichen menschlichen Figuren, die die Stunden schlugen, die mechanischen Vögel und Pferde des chinesischen Ingenieurs King-Shu Tse (ca. 400 v. Chr.) oder die programmierbaren musizierenden Automaten von Al-Dschazarī im 12. Jahrhundert. Auch Leonardo da Vincis Skizzen eines mechanischen Ritters aus dem späten 15. Jahrhundert, der Arme, Kopf und Kiefer bewegen konnte, gehören in diese Reihe früher Konzepte. Diese frühen Beispiele demonstrieren eine langanhaltende menschliche Faszination für die Schaffung künstlicher Wesen und legten den konzeptionellen Grundstein für spätere Entwicklungen.
Historische Meilensteine der Roboterentwicklung (Vor-1970 und wichtige theoretische/frühe praktische Schritte im 20. Jh.)

Historische Meilensteine der Roboterentwicklung (Vor-1970 und wichtige theoretische/frühe praktische Schritte im 20. Jh.) – Bild: Xpert.Digital
Die historische Entwicklung der Robotik vor 1970 zeichnet sich durch zahlreiche Meilensteine und theoretische Fortschritte aus. Bereits um 3500 v. Chr. wurden in der griechischen Mythologie durch die Mythen von Hephaistos und Pygmalion erste Vorstellungen intelligenter Mechanismen und künstlicher Wesen beschrieben. Um 1500 v. Chr. entwickelten die Ägypter Wasseruhren mit humanoiden Figuren, die erste Ansätze mechanischer Automation darstellten. Im Jahr 1206 n. Chr. konstruierte Ismail al-Dschazarī mit seinem Musikerboot eine frühe Form programmierbarer humanoider Roboter. Leonardo da Vinci entwarf 1495 n. Chr. Skizzen eines mechanischen Ritters, der in der Lage war, sich zu setzen sowie Kopf und Arme zu bewegen. 1769 entwickelte Wolfgang von Kempelen den “Schachtürken”, einen humanoid erscheinenden Automaten, der Schach spielen konnte, wenngleich dieser durch einen versteckten Menschen gesteuert wurde.
1920/1921 führte Karel Čapek in seinem Theaterstück “R.U.R.” den Begriff “Roboter” ein, inspiriert vom tschechischen Wort “robota”, was übersetzt “Zwangsarbeit” bedeutet. Auf der Weltausstellung 1939 präsentierte Westinghouse Electric den Roboter “Elektro”, der sprechen und auf Befehle reagieren konnte. In den 1940er-Jahren entwickelte George Devol den Industrieroboter “Unimate”, der die industrielle Produktion revolutionierte, indem er repetitive Aufgaben automatisierte. Isaac Asimov formulierte 1942 in seinen Science-Fiction-Erzählungen die bekannten “Drei Gesetze der Robotik”, die ethische Richtlinien für den Umgang mit Robotern boten.
1948 veröffentlichte Norbert Wiener sein bahnbrechendes Werk “Kybernetik”, das die Regelung und Kommunikation in Maschinen und Lebewesen thematisierte und damit die Entwicklung der Robotik stark beeinflusste. Im selben Jahr schuf William Grey Walter die autonomen Roboter “Elmer” und “Elsie”, die auf Umweltveränderungen reagieren konnten. Schließlich stellte Alan Turing 1950 mit dem Turing-Test ein Konzept vor, das die Fähigkeit einer Maschine prüfen sollte, intelligentes Verhalten zu zeigen, das von dem eines Menschen nicht unterscheidbar ist.
Das 20. Jahrhundert: Aufbruch in die moderne Robotik
Das 20. Jahrhundert markierte den Beginn der modernen Robotik, geprägt durch theoretische Fundamente und erste praktische Realisierungen. Der Begriff “Roboter” wurde 1920/1921 von Karel Čapek in seinem Theaterstück “R.U.R. (Rossums Universalroboter)” geprägt, abgeleitet vom tschechischen Wort “robota”, das Zwangsarbeit bedeutet. Ein früher bekannter humanoider Roboter war “Elektro”, der 1939 auf der New Yorker Weltausstellung von Westinghouse präsentiert wurde und fähig war, auf Sprachbefehle zu reagieren und einfache Sätze zu sprechen. Isaac Asimov leistete mit seinen “Drei Gesetzen der Robotik” (1942) einen wichtigen Beitrag zur ethischen Diskussion und popularisierte den Begriff “Robotik” als Wissenschaft von Robotern. Parallel dazu legten Pioniere wie Norbert Wiener mit seiner Arbeit zur Kybernetik (1948) und William Grey Walter mit seinen frühen autonomen Robotern (1948) wichtige theoretische und praktische Grundlagen. Alan Turings Veröffentlichung des Turing-Tests (1950) bot einen konzeptionellen Rahmen zur Bewertung maschineller Intelligenz. Obwohl nicht humanoid, war die Entwicklung des ersten Industrieroboters, Unimate, durch George Devol in den 1940er bis 1960er Jahren ein entscheidender Schritt in der Automatisierungstechnik und revolutionierte die industrielle Fertigung. Diese Periode war geprägt von einer intensiven literarischen und wissenschaftlichen Auseinandersetzung mit den gesellschaftlichen, ethischen und technologischen Herausforderungen der Robotik.
Wichtige Meilensteine nach 1970: Der Aufstieg funktionaler Humanoider
Nach 1970 begann die Ära der funktionalen humanoiden Roboter, die zunehmend komplexere Aufgaben erfüllen konnten.
- WABOT-1 (1972-1973, Waseda Universität): Dieser Roboter gilt als der weltweit erste voll funktionsfähige, intelligente humanoide Roboter. Entwickelt mit dem Ziel, einen “persönlichen Roboter” zu schaffen, konnte WABOT-1 gehen, mit einer Person auf Japanisch kommunizieren, Entfernungen und Richtungen zu Objekten mit künstlichen Augen und Ohren messen sowie Objekte mit seinen Händen greifen und transportieren.
- WABOT-2 (1984, Waseda Universität): Als “Spezialroboter” konzipiert, war WABOT-2 ein humanoider Musiker, der Noten lesen und auf einer elektronischen Orgel spielen konnte.
- Honda E-Serie (1986-1993) & P-Serie (1993-1997): Honda leistete Pionierarbeit in der bipedalen Lokomotion. Die E-Serie diente der Grundlagenforschung, während die P-Serie zu fortschrittlicheren Prototypen führte. P2 (1996) war der erste selbstregulierende, zweibeinige Roboter, und P3 (1997) der erste vollständig unabhängige bipedale humanoide Roboter, der ohne externe Kabel gehen konnte.
- ASIMO (2000, Honda): Als Hondas elfter bipedaler humanoider Roboter war ASIMO in der Lage zu rennen, zu interagieren und semi-autonome Aufgaben auszuführen. Eine verbesserte Version wurde 2011 vorgestellt. ASIMO wurde 2004 in die Robot Hall of Fame aufgenommen. Die Entwicklung wurde 2018 eingestellt und ASIMO 2022 offiziell “pensioniert”. Die Einstellung von Projekten wie ASIMO signalisiert dabei nicht unbedingt ein Scheitern, sondern oft eine strategische Neuausrichtung hin zu praktischeren oder wirtschaftlich rentableren Anwendungen. Dies spiegelt eine Marktreife wider, bei der Forschungs- und Entwicklungsinvestitionen zunehmend auf konkrete Marktbedürfnisse und Rentabilität ausgerichtet werden müssen.
- HRP-Serie (Japan, AIST/Kawada): Das Humanoid Robotics Project (HRP) begann mit modifizierten Honda P3-Robotern und entwickelte diese weiter. HRP-2 (2002) war ein bipedal gehender Roboter. HRP-4C “Miim” (2009) war ein feminin gestalteter Roboter, der singen und tanzen konnte.
- Actroid (2003, Osaka Universität/Kokoro): Dieser Roboter zeichnete sich durch eine realistische Silikonhaut aus und legte den Fokus auf ein menschenähnliches Erscheinungsbild.
- HUBO (2005, KAIST): War Südkoreas erster gehender humanoider Roboter.
- Nao (2006, Aldebaran Robotics/SoftBank): Ein kleiner, programmierbarer humanoider Roboter mit Open-Source-Ansätzen, der weitreichende Verbreitung in Forschung und Lehre fand.
- Atlas (2013-heute, Boston Dynamics): Ursprünglich für die DARPA Robotics Challenge entwickelt, ist Atlas ein hochdynamischer humanoider Roboter, der komplexe Bewegungen wie Gehen, Rennen, Springen und Rückwärtssaltos ausführen kann. Eine vollelektrische Version mit verbesserter Geschicklichkeit wurde im April 2024 vorgestellt. Die DARPA Robotics Challenge fungierte als wichtiger Katalysator, der die Grenzen humanoider Fähigkeiten in Katastrophenszenarien erweiterte und Innovationen förderte, die nun in kommerzielle Produkte einfließen. Die für diese Herausforderungen entwickelte fortschrittliche Mobilität und Robustheit sind heute Merkmale kommerzieller oder seriennaher Roboter.
- Valkyrie (2013, NASA): Ebenfalls für die DARPA Robotics Challenge entwickelt, wurde Valkyrie für den Einsatz in beschädigten, von Menschen geschaffenen Umgebungen konzipiert und birgt Potenzial für Weltraummissionen.
- Jüngste bemerkenswerte Entwicklungen (nach 2020):
- Ameca (Engineered Arts, 2022): Bekannt für sein extrem ausdrucksstarkes Gesicht.
- Optimus (Tesla, 2022): Ein Allzweck-Humanoider, der für den Einsatz in der Fertigung und potenziell im Haushalt entwickelt wird.
- Unitree G1 (2024): Ein relativ kostengünstiger humanoider Roboter.
- Figure 01/02 (Figure AI): Allzweck-Humanoide, die bereits in industriellen Pilotprojekten getestet werden.
Die historische Entwicklung zeigt einen deutlichen Wandel von universitär geleiteter Grundlagenforschung (z.B. Waseda, Hondas frühe Arbeiten) hin zu kommerziell getriebener Entwicklung mit spezifischen Anwendungszielen (z.B. Teslas Optimus für die Fertigung, Agilitys Digit für die Logistik). Dies deutet auf die zunehmende Reife des Feldes und die wachsende wirtschaftliche Rentabilität hin.
Kerntechnologien und Komponenten
Die Fähigkeiten humanoider Roboter basieren auf einem komplexen Zusammenspiel verschiedener Kerntechnologien und Komponenten. Diese reichen von mechanischen Systemen, die Bewegung und Struktur bereitstellen, über fortschrittliche Sensorik zur Wahrnehmung der Umwelt bis hin zu ausgefeilter Software und KI-Architekturen, die Steuerung, Lernen und Interaktion ermöglichen. Die Entwicklung in jedem dieser Bereiche ist entscheidend für den Fortschritt der gesamten humanoiden Robotik.
Mechanische Systeme
Die mechanischen Systeme bilden das physische Fundament humanoider Roboter und umfassen Aktuatoren für die Bewegung, Materialien für die Struktur und Energiesysteme für den Betrieb.
Aktuatorik
Aktuatoren sind die Motoren, die für die Bewegung im Roboter verantwortlich sind und die Funktion menschlicher Muskeln und Gelenke nachahmen. Ideale Aktuatoren sollten eine hohe Leistungsdichte, geringe Masse und kleine Abmessungen aufweisen.
- Elektrische Aktuatoren: Sie sind die am weitesten verbreitete Art und typischerweise kleiner. Für Gelenke in Menschengröße können jedoch mehrere elektrische Aktuatoren pro Gelenk erforderlich sein, um genügend Kraft zu erzeugen (z.B. HRP-2). Fortschritte bei Permanentmagneten (z.B. Neodym-Eisen-Bor) haben die Leistungsdichte elektrischer Motoren deutlich erhöht und den Abstand zu hydraulischen Systemen verringert. Elektrische Aktuatoren zeichnen sich durch eine hohe Effizienz (75-80%), eine geringere Anzahl von Komponenten und einen geringeren Wartungsaufwand im Vergleich zu hydraulischen Systemen aus. Der Trend zu elektrischen Aktuatoren, selbst bei hochdynamischen Robotern wie dem neuen Atlas, signalisiert eine Marktreife, die auf kommerzielle Rentabilität (Effizienz, Wartung, Kosten) abzielt und nicht nur auf rohe Spitzenleistung. Dies wird die Einführung in industriellen und potenziell auch in Verbraucheranwendungen beschleunigen.
- Hydraulische Aktuatoren: Diese bieten eine höhere Leistung und eine bessere Drehmomentsteuerung, können aber sehr sperrig sein (z.B. der ursprüngliche Atlas). Elektrohydraulische Aktuatoren (EHA) stellen eine Lösung dar, um dieses Größenproblem zu mildern. Hydraulische Systeme weisen eine hohe Stoßfestigkeit auf, haben jedoch eine geringere Effizienz (40-55%) und erfordern mehr Wartung.
- Pneumatische Aktuatoren: Sie funktionieren auf der Basis der Kompressibilität von Gasen, ein bekanntes Beispiel ist der McKibben-Muskel.
Kawasaki entwickelt beispielsweise den “Hydro Servo Muscle”, einen elektrohydraulischen Aktuator, der hohe Stoßfestigkeit und Leistungsdichte für ihren humanoiden Roboter Kaleido bieten soll. Die Entscheidung von Boston Dynamics, den neuen Atlas vollelektrisch zu gestalten, deutet auf einen Trend hin zur Kommerzialisierung und breiteren Anwendbarkeit hin.
Vergleichende Analyse der Aktuatortechnologien für humanoide Roboter
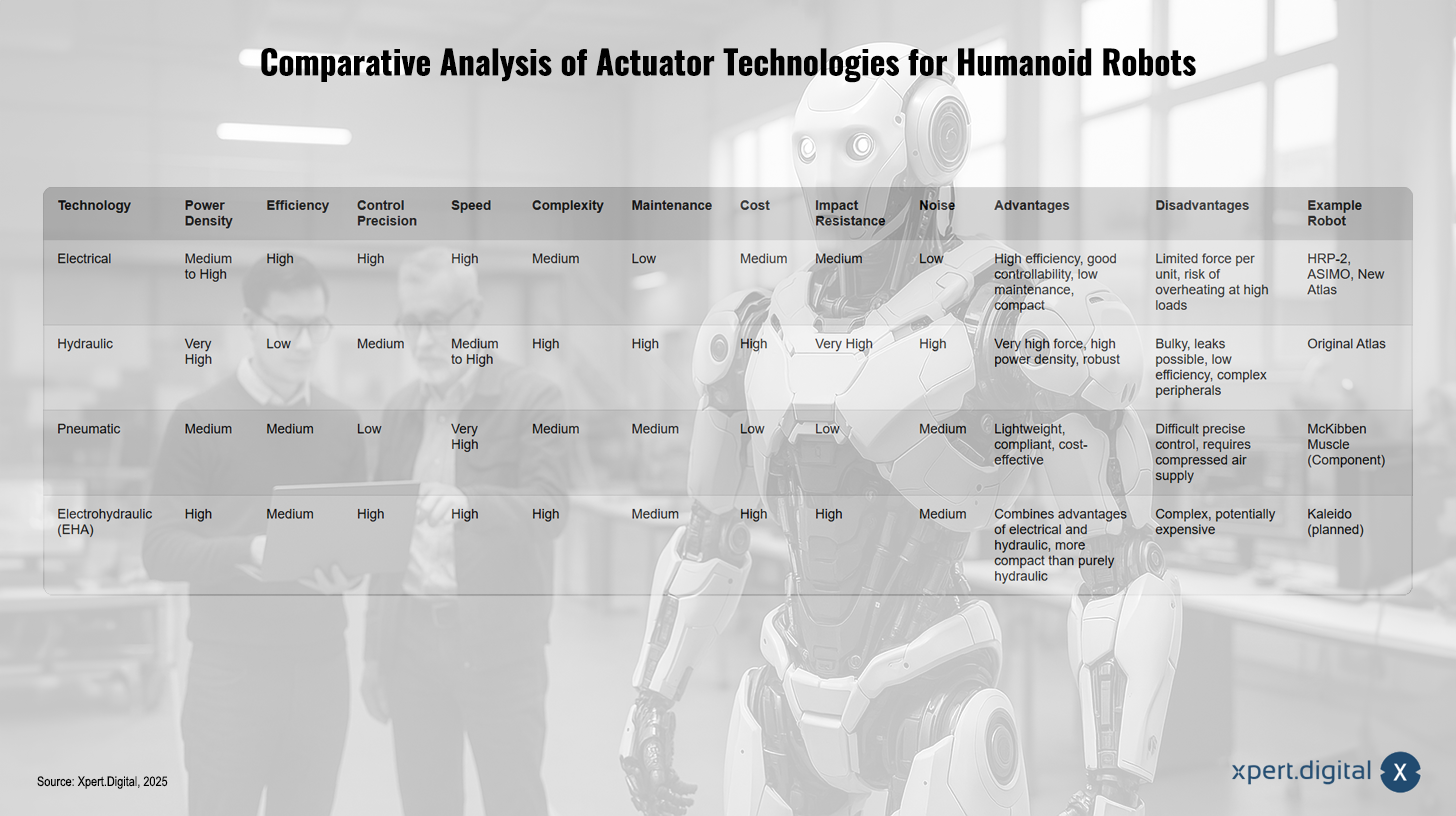
Vergleichende Analyse der Aktuatortechnologien für humanoide Roboter – Bild: Xpert.Digital
Die vergleichende Analyse von Aktuatortechnologien für humanoide Roboter zeigt, dass elektrische Aktuatoren eine hohe Effizienz, gute Regelbarkeit, geringe Wartungsanforderungen und Kompaktheit aufweisen, dabei jedoch in der maximalen Kraft und bei Überhitzung begrenzt sind – Beispiele hierfür sind HRP-2, ASIMO und der neue Atlas. Hydraulische Aktuatoren bieten eine sehr hohe Kraft, hohe Leistungsdichte und Robustheit, sind jedoch sperrig, ineffizient, anfällig für Leckagen und erfordern eine komplexe Peripherie, wie der ursprüngliche Atlas zeigt. Pneumatische Aktuatoren überzeugen durch Leichtigkeit, Nachgiebigkeit und Kosteneffizienz, lassen sich jedoch schwer präzise steuern und benötigen eine Druckluftversorgung, ein Beispiel ist der McKibben-Muskel. Elektrohydraulische Aktuatoren (EHA) kombinieren die Stärken elektrischer und hydraulischer Antriebe, sind kompakter als rein hydraulische Systeme, jedoch komplex und potenziell teuer, wie es beim geplanten Kaleido der Fall ist.
Materialien und strukturelles Design
Leichtbaustrukturen sind entscheidend für die Flexibilität, Energieeinsparung und eine längere Batterielebensdauer humanoider Roboter. Ein hohes Last-Gewichts-Verhältnis und eine hohe Steifigkeit der Struktur sind erwünscht. Methoden der evolutionären Strukturoptimierung (ESO) werden eingesetzt, um das Gewicht von Rahmenkonstruktionen signifikant zu reduzieren (in einer Studie um 50,15%), ohne dabei die Steifigkeit oder das Schwingungsverhalten zu beeinträchtigen. Als Materialien kommen beispielsweise Magnesiumlegierungen und Kunststoffharze zum Einsatz, wie bei ASIMO.
Energiesysteme (Batterien)
Die Energieversorgung ist eine der größten Herausforderungen. Üblich sind Lithium-Ionen (Li-Ion) und Lithium-Eisenphosphat (LiFePO₄) Batterien. Der Tesla Optimus nutzt beispielsweise ein 2,3 kWh, 52V System, während der Unitree H1 eine 15Ah (0,864 kWh) Batterie verwendet. Die Batterie von Valkyrie hat eine Kapazität von 1,8 kWh und ermöglicht eine Betriebszeit von etwa einer Stunde.
Die zentralen Herausforderungen sind die begrenzte Energiedichte, die zu kurzen Betriebszeiten führt, die benötigte hohe Leistungsabgabe für dynamische Aktionen, die langsame Ladegeschwindigkeit (industrielle Anwendungen erfordern oft ~20 Stunden Betrieb, aktuell sind es eher 4-6 Stunden) und die Sicherheit der Batterien unter extremen Umgebungsbedingungen. Fortschritte werden bei Semi-Solid-State- und Solid-State-Batterien erwartet, die höhere Energiedichten versprechen (z.B. Xinwangda mit 500 Wh/kg, Farasis Energy mit >330 Wh/kg, REPT mit >400 Wh/kg). Auch Schnellladetechnologien sind von entscheidender Bedeutung.
Passend dazu:

Sensor- und Wahrnehmungssysteme
Humanoide Roboter müssen ihre Umgebung präzise wahrnehmen, um sicher und effektiv interagieren zu können. Die Perzeption spielt eine fundamentale Rolle, um eine nahtlose Interaktion mit Menschen und der Umgebung zu ermöglichen. Die alleinige Abhängigkeit von visuellen Systemen reicht für komplexe Manipulationen und sichere Interaktionen in unübersichtlichen oder verdeckten Umgebungen nicht aus. Daher entwickeln sich Propriozeption und taktile Sensorik zu den nächsten wichtigen Grenzen in der Sensortechnologie für Humanoide. Die Grenzen der visuellen Wahrnehmung bei Aufgaben wie dem Greifen verdeckter Objekte oder dem Anwenden präziser Kräfte treiben signifikante Forschungs- und Entwicklungsanstrengungen in diesen anderen sensorischen Modalitäten voran. Erfolge in diesen Bereichen werden ein neues Niveau an manipulativer Fähigkeit erschließen.
Visuelle Systeme
Kameras (RGB, Tiefenkameras), LiDAR, Radar und Ultraschallsensoren werden für die Umwelterfassung, Objekterkennung und Navigation eingesetzt. Der Tesla Optimus verlässt sich stark auf Kameras (ein Multi-Kamera-Setup ähnlich wie bei seinen Fahrzeugen), während der Atlas von Boston Dynamics LiDAR, Tiefen- und RGB-Sensoren nutzt. Valkyrie verwendet das Carnegie Robotics Multisense SL System (Laser, Stereo, IR-strukturiertes Licht) sowie zusätzliche Gefahrenkameras.
Auditive Systeme
Mikrofone dienen der Spracherkennung und der Erfassung von Umgebungsgeräuschen.
Taktile Sensorik
Diese ist entscheidend für die Manipulation, das Erkennen von Objekteigenschaften (Form, Steifigkeit, Weichheit) und die sichere Interaktion. Sie umfasst Kraft-, Druck-, Drehmoment-, Schlupf- und Temperatursensoren. Die menschliche Hand verfügt über etwa 17.000 Tastrezeptoren; dies zu replizieren ist eine enorme Herausforderung. Fortschritte umfassen flexible elektronische Häute (E-Skins) und fortschrittliche KI-Algorithmen. Unternehmen wie Sanctuary AI (Phoenix Roboter), Meta AI (Digit 360 mit GelSight-Technologie) und die Duke University (SonicSense mittels Akustik) erzielen hier Fortschritte. Taktile Sensorik ermöglicht das blinde Greifen, die Erkennung von Abrutschen und die Vermeidung übermäßiger Kraftanwendung, was besonders wichtig ist, da viele aktuelle Robotergreifer noch einfache Zwei-Finger- oder Saugnapf-Systeme sind.
Propriozeption
Dies ist der Sinn für die eigene Körperposition und -bewegung ohne visuelle oder auditive Reize und ist kritisch für eine robuste Steuerung, insbesondere bei Soft-Robotern. Selbst für biologische Systeme ist dies eine Herausforderung; aktuellen Robotern fehlt oft dieses reichhaltige Feedback. Das KineSoft-Framework nutzt beispielsweise Dehnungssensor-Arrays zur Formschätzung in Soft-Roboterhänden.
Sensorfusion und Zustandsschätzung
Die Kombination von Daten aus multiplen Sensoren (Multi-Sensor-Fusion) unter Verwendung von Techniken wie Bayes’schen Filtern und Optimierungsverfahren (Maximum a posteriori, MAP) ist entscheidend für eine robuste interne Zustandsschätzung und das Verständnis der externen Umgebung. Maschinelles Lernen wird hier zunehmend gegenüber regelbasierten Systemen bevorzugt.
Software, KI und Steuerungsarchitekturen
Die Intelligenz und das Verhalten humanoider Roboter werden durch komplexe Software, fortschrittliche KI-Modelle und ausgeklügelte Steuerungsarchitekturen bestimmt. Die Entwicklung einzelner Komponenten (Aktuatoren, Sensoren, Batterien) wird zunehmend von den Anforderungen der KI und lernbasierter Steuerungssysteme bestimmt. Dies schafft eine Rückkopplungsschleife, in der KI-Fortschritte bessere Hardware erfordern und verbesserte Hardware komplexere KI ermöglicht. KI-Modelle für komplexe Aufgaben wie Ganzkörpermanipulation oder agile Fortbewegung benötigen hochreaktionsfähige Aktuatoren, dichte sensorische Rückmeldungen (insbesondere taktile) und ausreichende Energie. Lernbasierte Ansätze profitieren beispielsweise von Hardware, die für ML-Kompatibilität ausgelegt ist (z. B. einfache Datenerfassung, robuste Sensoren). Diese Koevolution ist unerlässlich, um aktuelle Leistungsplateaus zu überwinden.
Lokomotion und dynamisches Gleichgewicht
Die Aufrechterhaltung des dynamischen Gleichgewichts stützt sich auf Konzepte wie den Zero Moment Point (ZMP). Model Predictive Control (MPC) und Whole-Body Control (WBC) sind populäre Ansätze zur Integration anspruchsvoller Modelle und zur Erzeugung nachgiebiger Bewegungen. Eine Herausforderung bleibt die Parameterauswahl, da die manuelle Abstimmung sehr arbeitsintensiv ist. Methoden wie DiffTune nutzen differenzierbare Programmierung zur automatischen Abstimmung. Lernansätze (z.B. Reinforcement Learning) werden für die zweibeinige Fortbewegung und die Sturzerholung eingesetzt.
Manipulation und Dexterität
Die Ganzkörpersteuerung (Whole-Body Control) koordiniert zahlreiche Freiheitsgrade für komplexe Aufgaben. Die Nachbildung menschlicher Feinmotorik ist ein bedeutendes Forschungsgebiet. Die Ganzkörpermanipulation, d.h. die Nutzung beliebiger Körperteile zur Interaktion, stellt eine große Herausforderung dar. Der Roboter RoboPanoptes nutzt beispielsweise Ganzkörper-Vision (21 Kameras) für Ganzkörper-Dexterität. Das Lernen von menschlichen Demonstrationen (Imitationslernen) ist ein Schlüsselansatz.
Navigation und Umgebungsinteraktion
Pfadplanung, Hindernisvermeidung und Selbstkollisionserkennung sind entscheidend für die Bewegung in komplexen Umgebungen. SLAM (Simultaneous Localization and Mapping) in Kombination mit Reinforcement Learning (RL) wird für die Navigation mobiler Roboter eingesetzt, um die Konvergenz zu verbessern und Kollisionen zu reduzieren.
Mensch-Roboter-Interaktion (HRI) und kognitive Fähigkeiten
LLMs und Vision-Language-Modelle (VLMs) verbessern das logische Denken von Robotern, das Kontextverständnis und ermöglichen natürlichere, dialogorientierte Interaktionen. Roboter werden mit “Persönlichkeiten” und neugierigem Verhalten ausgestattet. Herausforderungen sind die Mehrdeutigkeit der Sprache, die zu Fehlern führen kann, und die Komplexität der Abbildung von Sprache auf physische Aktionen. Das Fine-Tuning von LLMs auf Roboterdaten (Vision Language-Action Models – VLAs) ist eine vielversprechende Richtung.
Lernparadigmen und KI-Modelle
Es findet ein Wandel von regelbasierten Systemen zu maschinellem Lernen (ML) und Deep Learning (DL) statt. Reinforcement Learning (RL) wird für motorische Fähigkeiten eingesetzt, ebenso wie Imitationslernen von menschlichen Demonstrationen. Der Sim-to-Real-Transfer ist entscheidend für ein effizientes Training; die ToddlerBot-Plattform wurde beispielsweise für ML-Kompatibilität und Datenerfassung entwickelt. Das ultimative Ziel ist die Künstliche Allgemeine Intelligenz (AGI), die Robotern menschenähnliches Lernen, logisches Denken und Anpassungsfähigkeit über verschiedenste Aufgaben hinweg ohne spezifische Vorprogrammierung ermöglichen würde. Die “Black-Box”-Natur einiger fortgeschrittener KI-Modelle, insbesondere im Deep Learning, stellt eine Herausforderung für sicherheitskritische Anwendungen und das Debugging dar. Dies erfordert neue Ansätze zur Erklärbarkeit und Verifizierung in humanoiden Steuerungssystemen. Während KI beispiellose Fähigkeiten ermöglicht, ist die Schwierigkeit, nachzuvollziehen, wie Deep-Learning-Modelle zu Entscheidungen gelangen, ein Problem, insbesondere für Roboter, die eng mit Menschen interagieren oder in gefährlichen Umgebungen arbeiten. Dieser Mangel an Interpretierbarkeit kann die Sicherheitszertifizierung und Fehlerbehebung behindern und die Forschung zu transparenterer KI oder robusteren Validierungsmethoden vorantreiben.
🎯🎯🎯 Profitieren Sie von der umfangreichen, fünffachen Expertise von Xpert.Digital in einem umfassenden Servicepaket | BD, R&D, XR, PR & Digitale Sichtbarkeitsoptimierung

Profitieren Sie von der umfangreichen, fünffachen Expertise von Xpert.Digital in einem umfassenden Servicepaket | R&D, XR, PR & Digitale Sichtbarkeitsoptimierung - Bild: Xpert.Digital
Xpert.Digital verfügt über tiefgehendes Wissen in verschiedenen Branchen. Dies erlaubt es uns, maßgeschneiderte Strategien zu entwickeln, die exakt auf die Anforderungen und Herausforderungen Ihres spezifischen Marktsegments zugeschnitten sind. Indem wir kontinuierlich Markttrends analysieren und Branchenentwicklungen verfolgen, können wir vorausschauend agieren und innovative Lösungen anbieten. Durch die Kombination aus Erfahrung und Wissen generieren wir einen Mehrwert und verschaffen unseren Kunden einen entscheidenden Wettbewerbsvorteil.
Mehr dazu hier:
Kommerzialisierung und Potenziale: Der Marktdurchbruch humanoider Roboter
Anwendungen von Humanoiden Robotern (nach Sektoren, mit Fokus 2025)
Humanoide Roboter finden zunehmend Anwendung in einer Vielzahl von Sektoren, wobei ihre menschenähnliche Form und ihre wachsenden Fähigkeiten sie für Aufgaben prädestinieren, die traditionell von Menschen ausgeführt wurden. Bis 2025 zeichnen sich deutliche Fortschritte in der Erprobung und ersten Implementierung ab, insbesondere in industriellen Bereichen, im Gesundheitswesen und in Nischenanwendungen. Die menschenähnliche Form ist dabei ein zweischneidiges Schwert: Sie erleichtert die Integration in menschliche Umgebungen und die Mensch-Roboter-Interaktion (HRI), setzt aber auch hohe Erwartungen an Geschicklichkeit und Intelligenz, die derzeit nur schwer zu erfüllen sind. Dies könnte zu Enttäuschungen führen, wenn die Fähigkeiten nicht dem anthropomorphen Versprechen entsprechen. Die menschliche Hand besitzt eine unglaubliche Geschicklichkeit, und die menschliche Intelligenz ist äußerst anpassungsfähig. Aktuelle Roboter haben, obwohl sie sich verbessern, immer noch Schwierigkeiten mit Feinmanipulation und robustem Betrieb in unstrukturierten Umgebungen. Diese Lücke zwischen Erscheinungsbild und tatsächlicher Leistungsfähigkeit könnte die Akzeptanz und den wahrgenommenen Nutzen beeinträchtigen, wenn sie nicht sorgfältig gemanagt wird.
Passend dazu:

Industrielle Automation (Fertigung & Logistik)
In der industriellen Automation versprechen humanoide Roboter eine Rationalisierung von Montagelinien, Wartungs- und Inspektionsarbeiten sowie Logistikprozessen.
Fertigung: Humanoide Roboter assistieren menschlichen Arbeitskräften bei Präzisionsaufgaben, dem Heben schwerer Lasten und repetitiven Tätigkeiten.
- Fallstudie: BMW & Figure AI: Figure 02 Roboter werden im BMW-Werk in Spartanburg, South Carolina, für Aufgaben wie die Montage von Fahrgestellen und den Transport von Teilen eingesetzt. Nach ersten Pilotprojekten im Jahr 2024 erfolgte Anfang 2025 die dauerhafte Implementierung. Funktionale Upgrades führten bis November 2024 zu einer 400%igen Steigerung der Bewegungsgeschwindigkeit, wodurch die Roboter bis zu 1.000 Komponenten pro Tag platzieren können. Figure AI plant, in den nächsten vier Jahren (2025-2028) 100.000 bis 200.000 Einheiten zu produzieren.
- Fallstudie: Mercedes-Benz & Apptronik: Der Apollo-Roboter assistiert Arbeitern in der Fertigungshalle.
- Tesla plant den Einsatz von Optimus-Robotern für Aufgaben wie das Laden von Blechen in den eigenen Fabriken, wobei mehrere tausend Einheiten im Jahr 2025 sinnvolle Aufgaben übernehmen sollen. BYD strebt den Einsatz von 1.500 Humanoiden im Jahr 2025 an, mit einer Skalierung auf 20.000 bis 2026.
Logistik & Lagerhaltung: Humanoide Roboter optimieren das Materialhandling, die Bestandsverwaltung sowie Kommissionier-, Verpackungs- und Sortierprozesse.
- Fallstudie: Amazon & Agility Robotics: Amazon testet den Roboter Digit für das Handling und Recycling von Behältern in seinen Forschungs- und Entwicklungszentren sowie Lagerhäusern. Digit ist für 8-Stunden-Schichten ausgelegt. Amazon testet ebenfalls den Apollo von Apptronik.
- Humanoide können menschliche Arbeit bei der Warenannahme und -entladung, Einlagerung, Kommissionierung, Verpackung, Etikettierung, Versand und Beladung sowie bei der Inventur reduzieren.
- IDTechEx verzeichnete Anfang 2025 nur eine begrenzte Anzahl von Pilotprojekten (<100 Humanoide) in Lagerhäusern. Eine großflächige Einführung (Tausende von Einheiten) wird aufgrund von 18-30-monatigen Testzyklen nicht vor Ende 2025 erwartet. Der Durchbruch in der Logistik wird für 2026-2027 erwartet.
Die bisher erfolgreichsten Anwendungen, wie Moxi in der Krankenhauslogistik und Digit beim Behälterhandling im Lager, konzentrieren sich auf spezifische, repetitive Aufgaben in relativ strukturierten Umgebungen, anstatt auf allgemeine Autonomie. Dies deutet auf einen Weg zur breiteren Akzeptanz hin: Spezialisiert beginnen und dann mit zunehmender technologischer Reife generalisieren. Moxi führt Lieferungen durch, Digit bewegt Behälter. Dies sind klar definierte Aufgaben. Dieser Ansatz steht im Gegensatz zur Vision von Allzweckrobotern. Der Erfolg aufgabenspezifischer Humanoider liefert ROI und generiert Daten zur Verbesserung allgemeiner Fähigkeiten, wodurch ein positiver Kreislauf entsteht. Dieser schrittweise Ansatz ist praktischer als der Versuch, von Anfang an eine vollständige Allzweckfähigkeit zu implementieren.
Gesundheitswesen und Altenpflege
In diesem Sektor bieten humanoide Roboter Unterstützung für medizinisches Personal, Patientenversorgung, soziale Begleitung und Rehabilitationsmaßnahmen.
Krankenhauslogistik: Moxi von Diligent Robotics ist in über 24 Gesundheitssystemen im Einsatz und hat fast eine Million Lieferungen (Laborproben, Verbrauchsmaterialien) durchgeführt, wodurch Personal erhebliche Zeit und Laufwege einspart. Der ROI zeigt sich in Effizienzsteigerung und reduzierter Burnout-Rate des Personals. Das Robotics-as-a-Service (RaaS)-Modell wird wahrscheinlich ein entscheidender Faktor für die Einführung in kleinen und mittleren Unternehmen (KMU) und für den Einsatz von Humanoiden in Sektoren sein, in denen hohe Vorabinvestitionen prohibitive Kosten darstellen, und somit den Zugang zu fortschrittlicher Robotik demokratisieren. Hohe Anschaffungskosten sind eine große Hürde. Das RaaS-Modell senkt die Eintrittsbarriere, indem es die Kosten von Investitionsausgaben (Capex) zu Betriebsausgaben (Opex) verlagert. Moxis Erfolg mit diesem Modell im Gesundheitswesen zeigt dessen Rentabilität. Wenn Humanoide leistungsfähiger werden, könnte RaaS kleineren Unternehmen oder Abteilungen ermöglichen, sie ohne massive Anfangsinvestitionen zu nutzen, was die Marktdurchdringung beschleunigen könnte.
Altenpflege, Begleitung & Assistenz: Roboter wie Grace (Hanson Robotics), Pepper (SoftBank), Nadine, PARO, ElliQ, Temi und der Toyota HSR bieten soziale Interaktion, Medikamentenerinnerungen, Gesundheitsüberwachung und Unterstützung bei täglichen Aktivitäten. Studien belegen positives Engagement und emotionale Unterstützung.
Rehabilitation: Humanoide wie Baxter und NAO werden als Therapieassistenten für Schlaganfallpatienten und Kinder eingesetzt, leiten Übungen an und halten Patienten bei der Stange.
Chirurgische Assistenz: Das Da Vinci Surgical System unterstützt bei minimalinvasiven Operationen.
Weltraumforschung und gefährliche Umgebungen
Weltraumforschung: Unterstützung von Astronauten, Durchführung von Außenbordeinsätzen (EVAs), Vorbereitung von Habitaten, Wartung auf der ISS oder zukünftigen Mond-/Marsbasen. Beispiele sind NASAs Robonaut 2 (erster Humanoider im All), Valkyrie (konzipiert für Marsmissionen) sowie die DLR-Roboter Rollin’ Justin, Agile Justin und TORO. Autonomer Betrieb ist aufgrund von Kommunikationsverzögerungen entscheidend. Modulares Design für Reparierbarkeit ist wichtig (z.B. Valkyrie).
Gefährliche Umgebungen (Katastrophenschutz, Nuklearbereich): Navigation in gefährlichem Gelände, Suche und Rettung, Lieferung von Hilfsgütern, Umgang mit toxischen Materialien, Unterstützung bei der Brandbekämpfung. Beispiele: Atlas von Boston Dynamics (konzipiert für solche Aufgaben), Spot in Fukushima Daiichi zur Erkundung, Strahlungsmessung und Probenahme von Trümmern. In Fukushima werden Roboter zur Überwachung, Dekontamination und Vorbereitung der Brennstofftrümmerbeseitigung eingesetzt.
Persönliche Assistenz und Haushaltsanwendungen
Humanoide Roboter sollen zukünftig Haushaltsarbeiten (Putzen, Kochen, Wäsche) übernehmen, für Sicherheit sorgen und als Begleiter dienen. Dieser Bereich befindet sich noch in einem sehr frühen Stadium. NEO Gamma von 1X Technologies wurde in einer häuslichen Umgebung für Aufgaben wie Kaffee kochen und Kochassistenz getestet (ferngesteuert). Herausforderungen sind unstrukturierte häusliche Umgebungen, Sicherheit, Kosten und die benötigte allgemeine Intelligenz.
Bildung, Unterhaltung und Kundenservice
Bildung: Interaktive Lehrassistenten, personalisiertes Lernen, insbesondere für MINT-Fächer und Schüler mit besonderen Bedürfnissen. Nao von SoftBank Robotics ist weit verbreitet (>13.000 Einheiten in über 70 Ländern) und wird zum Unterrichten von Programmierung, kulturellem Erbe, mathematischen Konzepten und zur Unterstützung von Kindern mit Autismus eingesetzt. Studien zeigen, dass Nao das Engagement erhöht, aber in lauten Umgebungen möglicherweise Benutzerfreundlichkeitsprobleme aufweist.
Unterhaltung: Interaktive Gastgeber, Darsteller in Themenparks, bei Veranstaltungen und in den Medien. Ameca von Engineered Arts ist bekannt für lebensechte Gesichtsausdrücke. RoboThespian wird für Theateraufführungen eingesetzt. Der Markt für Unterhaltungs-Humanoide soll erheblich wachsen.
Kundenservice & Gastgewerbe: Empfangspersonal, Informationsassistenten, Concierges im Einzelhandel, in Hotels und Banken. Pepper von SoftBank wurde als Empfangsroboter in Krankenhäusern und im Einzelhandel erprobt.
Aufstrebende und Nischenanwendungen
Zu den weiteren Anwendungsfeldern zählen Militär und Verteidigung (Aufklärung, Kampfmittelbeseitigung, Trainingssimulationen) sowie Landwirtschaft und Bauwesen.
Wichtige Anwendungsbereiche und Eignung humanoider Roboter (Stand 2025)
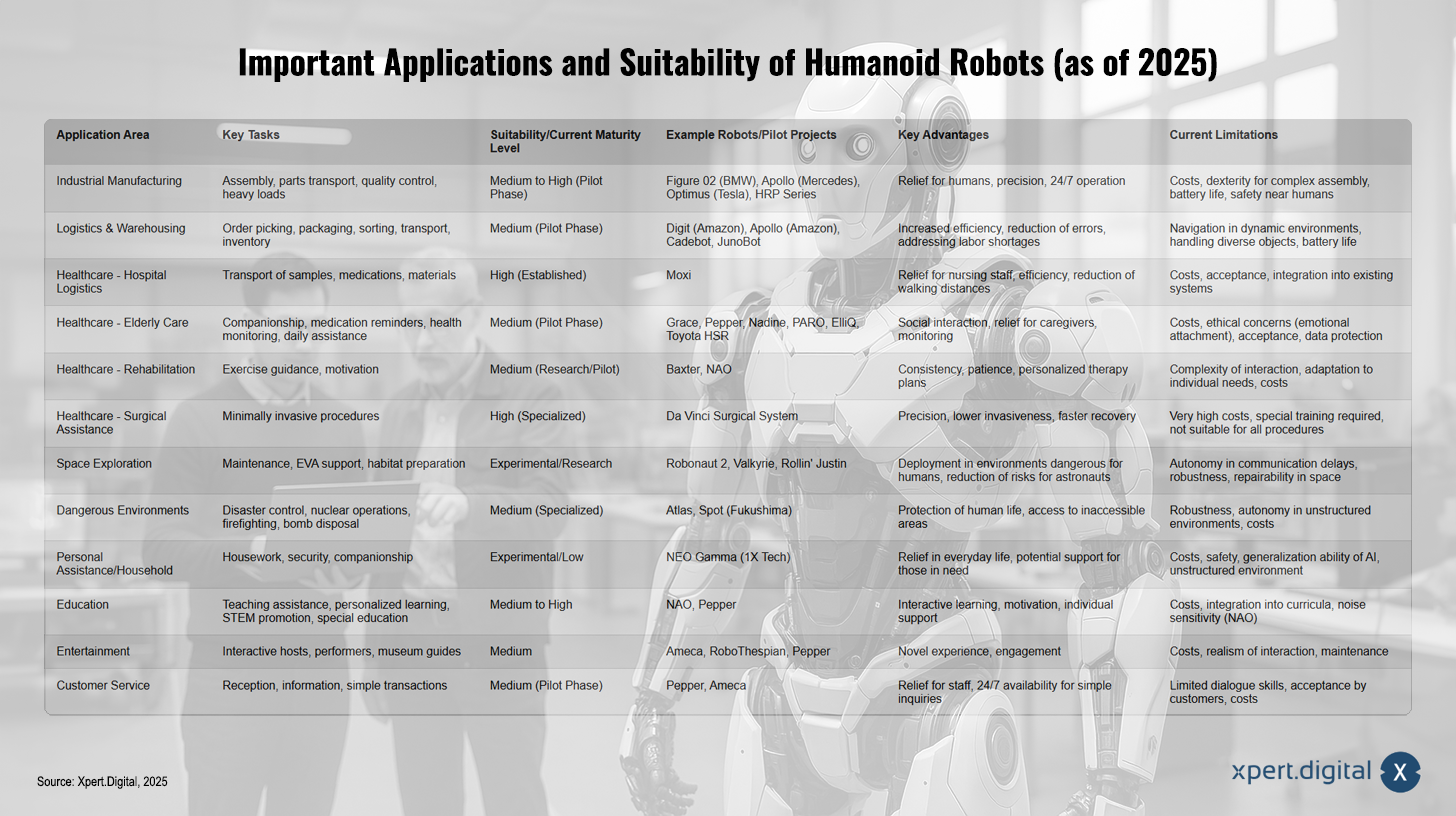
Wichtige Anwendungsbereiche und Eignung humanoider Roboter (Stand 2025) – Xpert.Digital
Wichtige Anwendungsbereiche und die Eignung humanoider Roboter im Jahr 2025 umfassen zahlreiche Felder. In der industriellen Fertigung übernehmen Roboter Aufgaben wie Montage, Teiletransport, Qualitätskontrolle und das Bewegen schwerer Lasten. Mit Projekten wie Figure 02 (BMW), Apollo (Mercedes), Optimus (Tesla) und der HRP-Serie haben sie einen mittleren bis hohen Reifegrad erreicht, sind jedoch durch Kosten, Batterielaufzeit und Sicherheit in der Nähe von Menschen noch eingeschränkt. In der Logistik und Lagerhaltung werden humanoide Roboter für Kommissionierung, Sortierung und Transport genutzt. Beispiele wie Digit und Apollo von Amazon oder Cadebot und JunoBot zeigen Pilothorizonte, obwohl Herausforderungen wie dynamische Umgebung oder die Handhabung diverser Objekte bestehen. Im Gesundheitswesen findet man Roboter vor allem in der Krankenhauslogistik, wo Modelle wie Moxi etabliert sind, um Pflegepersonal durch die Beförderung von Proben und Medikamenten zu entlasten. In der Altenpflege unterstützen Humanoide wie Grace und Pepper bei der Alltagsassistenz, doch ethische Bedenken und Datenschutzfragen bleiben Hindernisse. Für Rehabilitation, wie etwa motivierende Übungen, setzen Roboter wie Baxter und NAO Impulse, allerdings ist hier noch Forschung notwendig, um die Interaktion weiter anzupassen. Ein Vorreiter im Bereich chirurgischer Assistenz ist das Da Vinci Surgical System, das durch hohe Präzision minimalinvasive Eingriffe ermöglicht, jedoch nur für spezifische Anwendungen und mit hohen Kosten einsetzbar ist.
In der Weltraumforschung kommen Roboter wie Robonaut 2, Valkyrie oder Rollin’ Justin zum Einsatz, um Wartung und Habitatvorbereitung in gefährlichen Umgebungen durchzuführen und die Risiken für Astronauten zu minimieren. Dennoch bestehen Herausforderungen bei Autonomie, Robustheit und Reparierbarkeit. Bei Einsätzen in gefährlichen Umgebungen, wie Katastrophenschutz oder nuklearen Szenarien, leisten Roboter wie Atlas oder Spot wichtige Dienste. Die persönliche Assistenz und Haushaltsführung bleibt mit Prototypen wie NEO Gamma experimentell, wobei deren Kosten, Sicherheit und Flexibilität in unstrukturierten Umgebungen noch Hürden darstellen. In der Bildung fördern Roboter wie NAO und Pepper interaktives Lernen und personalisierte Unterstützung, während Kosten und Integration in Lehrpläne weiterhin Herausforderungen sind. Auch in der Unterhaltung sind Systeme wie Ameca und RoboThespian präsent und bieten neuartige Erlebnisse als Museumsführer oder Darsteller. Im Kundenservice wirken sie unterstützend bei Empfang und Informationen, mit dem Vorteil 24/7 verfügbar zu sein, jedoch sind begrenzte Dialogfähigkeiten und Akzeptanz Probleme. Insgesamt zeigen humanoide Roboter ein enormes Potenzial, stoßen derzeit jedoch noch auf technologische, finanzielle und gesellschaftliche Hindernisse, um ihr volles Spektrum zu entfalten.
Marktlandschaft und Kommerzialisierung (Stand 2025)
Der Markt für humanoide Roboter befindet sich im Jahr 2025 in einer dynamischen Phase des Übergangs von der Forschung und Entwicklung hin zur beginnenden kommerziellen Nutzung. Eine wachsende Zahl von Unternehmen, von etablierten Technologiekonzernen bis hin zu agilen Start-ups, treibt Innovationen voran und ringt um Marktanteile in diesem vielversprechenden Sektor.
Führende Unternehmen und Plattformen für humanoide Roboter
Zu den prominentesten Akteuren, die die Entwicklung und Kommerzialisierung humanoider Roboter vorantreiben, gehören (Stand ca. 2025):
- Tesla: Mit Optimus Gen 2 zielt Tesla auf den Einsatz in der eigenen Fertigung und potenziell auf allgemeine Assistenzaufgaben ab.
- Boston Dynamics: Der Electric Atlas ist bekannt für seine außergewöhnliche Mobilität und wird für Forschung, industrielle Inspektion und Katastrophenschutz weiterentwickelt.
- Figure AI: Mit den Modellen Figure 01, Figure 02 und dem angekündigten Figure 03 fokussiert sich das Unternehmen auf Allzweckroboter für Industrie und Logistik, mit Pilotprojekten u.a. bei BMW.
- Agility Robotics: Der Roboter Digit ist speziell für Logistikanwendungen konzipiert und wird beispielsweise von Amazon getestet.
- Apptronik: Apollo wird für industrielle Anwendungen und Logistik entwickelt, mit Partnerschaften u.a. mit Mercedes-Benz und Amazon.
- Unitree Robotics: Bietet mit Modellen wie G1 und H1 agilere und kostengünstigere Optionen für Forschung, Bildung und leichte industrielle Aufgaben.
- Sanctuary AI: Der Roboter Phoenix zielt auf kognitive Fähigkeiten und menschenähnliches Verhalten für komplexe Aufgaben in verschiedenen Sektoren ab.
- 1X Technologies: NEO ist für den Einsatz im Haushalt und für Assistenzaufgaben vorgesehen.
- PAL Robotics: Ein etablierter europäischer Hersteller mit einer Reihe von Robotern (REEM, TIAGo, TALOS, ARI) für Forschung, Gesundheitswesen und Serviceanwendungen.
- Honda: Obwohl ASIMO eingestellt wurde, bleibt das Erbe und die Grundlagenforschung des Unternehmens bedeutend für die Branche.
- Engineered Arts: Ameca ist bekannt für seine extrem lebensechten Gesichtsausdrücke und interaktiven Fähigkeiten, primär für soziale Interaktion und Kundenservice.
- UBTech Robotics: Mit Modellen wie Walker X für verschiedene Anwendungen.
- NEURA Robotics: Der 4NE-1 ist für die Mensch-Roboter-Kollaboration in häuslichen und industriellen Umgebungen konzipiert.
- DEEP Robotics: Dr01 ist ein robuster Humanoider für industrielle Präzisionsaufgaben.
- Fourier Intelligence: Der GR-1 wird in verschiedenen Kontexten eingesetzt.
Prominente Humanoide Roboterplattformen (ca. 2025)
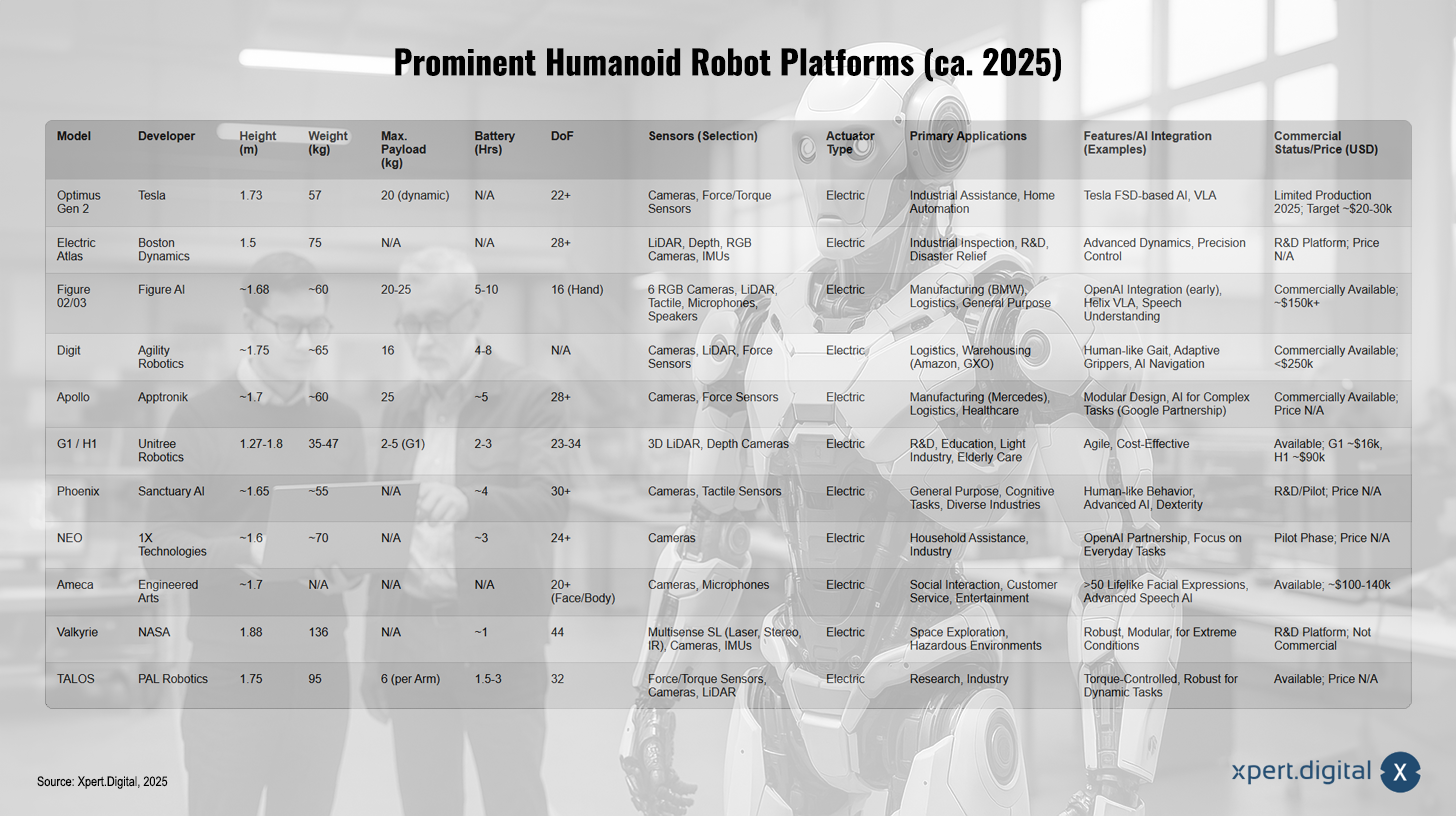
Prominente Humanoide Roboterplattformen (ca. 2025) – Bild: Xpert.Digital
Hinweis: Daten sind Schätzungen oder basieren auf verfügbaren Informationen (Stand Q1/Q2 2025). “k.A.” = keine Angabe. DoF = Degrees of Freedom (Freiheitsgrade).
Prominente humanoide Roboterplattformen im Jahr 2025 umfassen eine Vielzahl beeindruckender Modelle, die sowohl in der industriellen als auch in der häuslichen und wissenschaftlichen Anwendung eingesetzt werden können. Tesla’s Optimus Gen 2, mit einer Höhe von 1,73 m und einem dynamischen Nutzlastvermögen von bis zu 20 kg, ist mit einer Tesla FSD-basierten künstlichen Intelligenz ausgestattet. Mit einer begrenzten Produktion im Jahr 2025 wird ein Zielpreis von 20.000 bis 30.000 USD angestrebt. Boston Dynamics führt mit dem Electric Atlas ein Modell an, das sich durch hochentwickelte Dynamik und Präzisionssteuerung auszeichnet und für industrielle Inspektionen und Katastrophenschutz konzipiert ist. Figure AI bietet mit seinem Figure 02/03 ein Modell für Fertigung, Logistik und Allzwecke an, das OpenAI-Integrationen und ein fortschrittliches Sprachverständnis nutzt und zu einem Preis von über 150.000 USD erhältlich ist.
Agility Robotics’ Digit, der weniger als 250.000 USD kostet, glänzt mit menschenähnlichem Gang und adaptiven Greifern, ideal für Logistik und Lagerhaltung. Apollo von Apptronik, modular im Design und für komplexe Aufgaben mit KI ausgelegt, wird bereits in der Fertigung und im Gesundheitswesen eingesetzt. Günstigere Alternativen wie der Unitree Robotics G1, mit einem Preis von etwa 16.000 USD, bieten hingegen Agilität und Effizienz für leichte Industrie- und Bildungsanwendungen. Sanctuary AI’s Phoenix punktet mit menschenähnlichem Verhalten und fortschrittlicher KI, während der NEO von 1X Technologies sich in Haushaltsassistenz und Alltagsanwendungen auszeichnet. Beide befinden sich noch in der Pilotphase.
Für soziale Interaktionen und Unterhaltung wurde Ameca von Engineered Arts mit über 50 lebensechten Gesichtsausdrücken entwickelt und ist schon ab 100.000 USD erhältlich. Die NASA liefert mit Valkyrie einen auf extreme Bedingungen ausgelegten Roboter für Weltraumforschung, während TALOS von PAL Robotics dank seiner robusten und drehmomentgesteuerten Bauweise ideal für Forschung und Industrie ist. Die genannten Roboterplattformen demonstrieren bemerkenswerte Fortschritte in Technologie, KI-Integration und Flexibilität, wobei jede Plattform auf spezifische Anforderungen abgestimmt ist und so ein weites Anwendungsfeld abdeckt.
Investitions- und Finanzierungstrends
Der Sektor der humanoiden Robotik zieht erhebliche Risikokapitalinvestitionen an, wobei sich die Finanzierung zunehmend auf weniger, dafür aber größere Runden konzentriert. Beispiele hierfür sind Figure AI, das im Februar 2024 675 Millionen US-Dollar von Investoren wie Nvidia, Jeff Bezos, OpenAI und Microsoft erhielt, Physical Intelligence mit 400 Millionen US-Dollar und Apptronik mit 350 Millionen US-Dollar (unterstützt von Google). OpenAI investierte zudem 23,5 Millionen US-Dollar in 1X Technologies. Die weltweiten Investitionen in humanoide Start-ups stiegen von rund 308 Millionen US-Dollar im Jahr 2020 auf 1,1 Milliarden US-Dollar im Jahr 2024. Investoren fühlen sich besonders von flexiblen, vielseitig einsetzbaren Robotern mit fortschrittlichen KI-“Gehirnen” und Anwendungen in wachstumsstarken Bereichen wie der medizinischen Robotik angezogen. Parallel dazu fördern nationale Initiativen, insbesondere in China (“Made in China 2025”, “14. Fünfjahresplan”), die Robotikindustrie massiv durch staatliche Unterstützung und den Aufbau starker heimischer Lieferketten.
Marktgröße, Wachstumsprognosen und Segmentierung
Die Prognosen für das Wachstum des Marktes für humanoide Roboter sind durchweg optimistisch, auch wenn die genauen Zahlen je nach Analyse variieren. Allgemein wird erwartet, dass 2024 die Entwicklung fortschrittlicher Prototypen kennzeichnete, 2025 den Beginn der Massenproduktion einläutet und 2026 zu einer breiteren kommerziellen Akzeptanz führen wird. Diese breite Streuung der Marktprognosen spiegelt nicht nur unterschiedliche Methoden wider, sondern auch fundamentale Unsicherheiten hinsichtlich der Geschwindigkeit, mit der technische Hürden (siehe Abschnitt 6) überwunden und eine breite gesellschaftliche Akzeptanz (siehe Abschnitt 7) erreicht werden können. Die optimistischeren Prognosen gehen oft von schnellen Durchbrüchen bei KI und Kostenreduktion aus. Die endgültige Marktgröße wird stark davon abhängen, wie sich diese Faktoren entwickeln.
Zusammenfassung der Marktwachstumsprognosen für humanoide Robotik
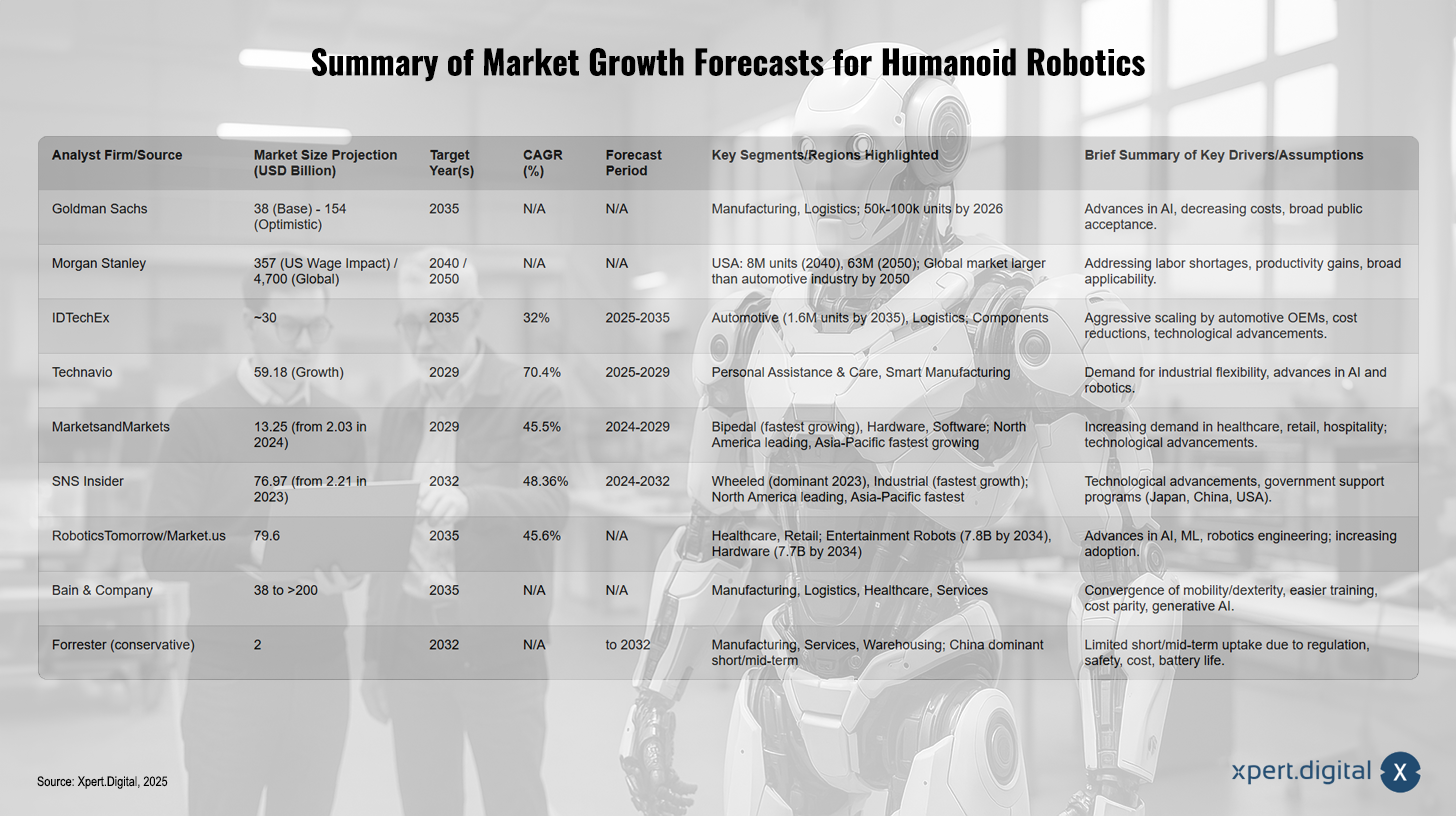
Zusammenfassung der Marktwachstumsprognosen für humanoide Robotik – Xpert.Digital
Marktsegmentierung:
- Nach Komponente: Hardware (Sensoren, Aktuatoren, Energiequellen, Steuerungssysteme) und Software (KI-basiert).
- Nach Mobilität: Bipedal (dominierend, anpassungsfähig für Logistik, Gesundheitswesen, Bildung) und Räder (Stabilität, geringere Kosten, für ebene Flächen). Der Markt für bipedale Roboter wächst am schnellsten (CAGR 54,47% 2023-2028).
- Nach Anwendung: Industrie (Automobil, Logistik führend), persönliche Assistenz & Pflege (signifikantes Wachstum), Forschung, Bildung, Unterhaltung, Such- & Rettungsdienste, Öffentlichkeitsarbeit, Militär.
- Nach Region: Nordamerika führt derzeit, aber Asien-Pazifik (insbesondere China) wird voraussichtlich das schnellste Wachstum und eine potenzielle Dominanz aufgrund starker Lieferketten und staatlicher Unterstützung aufweisen. In Europa wird aufgrund von Arbeitsgesetzen und Gewerkschaften eine langsamere Einführung erwartet. Die geopolitische Dimension (US-Führerschaft bei KI vs. Chinas Dominanz in der Lieferkette) könnte zu regionalen Aufspaltungen bei Technologiestandards, Anwendungsschwerpunkten und Marktentwicklung führen und potenziell unterschiedliche humanoide “Ökosysteme” schaffen. Die USA zeichnen sich durch KI und High-Spec-Roboter aus. China verfügt über eine starke Produktionsbasis und entwickelt schnell eigene Humanoide, die oft auf andere Erstmärkte abzielen. Dies könnte zu unterschiedlichen Entwicklungspfaden führen, wobei sich US-Firmen auf fortschrittliche KI-gesteuerte Fähigkeiten konzentrieren und chinesische Firmen Skaleneffekte in der Fertigung und Kostenvorteile nutzen. Handelspolitik und nationale Sicherheitsbedenken könnten diese Unterschiede weiter verschärfen.
Die Marktwachstumsprognosen für humanoide Robotik zeigen eine dynamische Entwicklung, die von verschiedenen Analysten aufgeteilt ist. Goldman Sachs schätzt den Markt bis 2035 auf 38 bis 154 Milliarden USD, wobei Fortschritte in künstlicher Intelligenz (KI), sinkende Kosten und eine breite öffentliche Akzeptanz als Haupttreiber gelten. Morgan Stanley prognostiziert bis 2050 einen globalen Markt, der die Automobilindustrie übertrifft, mit bis zu 63 Millionen Einheiten weltweit und einer bedeutenden Lohnauswirkung in den USA. IDTechEx sieht ein jährliches Wachstum von 32 % für 2025-2035, getrieben durch technologische Fortschritte und Kostensenkungen in der Automobilindustrie und Logistik. Technavio rechnet mit einem Marktvolumen von 59,18 Milliarden USD bis 2029 und nennt persönliche Assistenz, Pflege und Smart Manufacturing als treibende Segmente aufgrund von Fortschritten in KI und Robotik. MarketsandMarkets prognostiziert bis 2029 ein jährliches Wachstum von 45,5 %, angeführt von Nordamerika und Asien-Pazifik, mit wachsender Nachfrage in Gesundheitswesen, Einzelhandel und Gastgewerbe. SNS Insider hebt die Bedeutung staatlicher Förderprogramme hervor und sieht bis 2032 ein Wachstum auf 76,97 Milliarden USD, wobei Nordamerika führend und Asien-Pazifik am schnellsten wächst. RoboticsTomorrow/Market.us erwartet bis 2035 ein Volumen von 79,6 Milliarden USD, das durch Fortschritte in KI, maschinellem Lernen und Robotik-Engineering beschleunigt wird, mit besonderen Perspektiven in Entertainment und Hardware. Bain & Company prognostiziert bis 2035 einen Markt von 38 bis über 200 Milliarden USD und sieht Potenzial in Bereichen wie Fertigung, Gesundheitswesen und generativer KI. Im Gegensatz dazu bleibt Forrester konservativer und erwartet lediglich 2 Milliarden USD bis 2032, aufgrund von Herausforderungen wie Regulierung, Sicherheit und Batterieeffizienz. Insgesamt wird das Wachstum von Fortschritten in Technologie, KI und einer steigenden Nachfrage nach Automatisierung, Produktivität und Effizienz vorangetrieben.
Geschäftsmodelle (z.B. RaaS)
Das Modell “Robotics as a Service” (RaaS) gewinnt an Bedeutung. Es ermöglicht Unternehmen, Roboter zu leasen anstatt hohe Vorabinvestitionen zu tätigen, was humanoide Roboter auch für kleine und mittlere Unternehmen (KMU) zugänglich macht. Direktvertriebs- und Leasingmodelle werden die Industrielandschaft verändern. Das Aufkommen von RaaS ist nicht nur ein Finanzierungsmodell, sondern ein strategischer Faktor, der die Akzeptanz in KMU und neuen Sektoren erheblich beschleunigen könnte, indem er die Eintrittsbarrieren senkt und so die Marktbasis über große Unternehmen hinaus erweitert. Hohe Anschaffungskosten sind eine große Hürde. RaaS wandelt Investitions- in Betriebskosten um und macht fortschrittliche Robotik zugänglicher. Dies ist besonders relevant für KMU, die sich keine großen Investitionen leisten können. Wenn Humanoide effektiv über RaaS eingesetzt werden können, könnte dies zu einer viel schnelleren Marktdurchdringung führen, als wenn der Verkauf rein auf Kapitalgüterbasis erfolgen würde, und möglicherweise einige konservative Adoptionsprognosen übertreffen.
Wettbewerbsdynamik und Marktpositionierung
Der Wettbewerb wird zwischen vertikal integrierten Entwicklern (z.B. Tesla, das Hardware und KI intern entwickelt) und Unternehmen, die auf Partnerschaften setzen (z.B. Figure AI anfangs mit OpenAI, Apptronik mit Google), ausgetragen. Die USA führen bei KI-Training und High-End-Anwendungen, während China bei Lieferketten dominiert und sich zunächst stärker auf Unterhaltung und Bildung konzentrierte, aber im industriellen Bereich schnell aufholt. Laut Gartner Hype Cycle traten humanoide Roboter 2024 in die Phase des “Innovation Trigger” ein, wobei eine breite Akzeptanz möglicherweise noch über 10 Jahre entfernt ist. Forrester stufte Humanoide 2025 als eine der Top 10 aufstrebenden Technologien ein und prognostiziert eine disruptive Wirkung bis 2030.
Unsere Empfehlung: 🌍 Grenzenlose Reichweite 🔗 Vernetzt 🌐 Vielsprachig 💪 Verkaufsstark: 💡 Authentisch mit Strategie 🚀 Innovation trifft 🧠 Intuition

Vom Lokalen zum Globalen: KMUs erobern den Weltmarkt mit cleverer Strategie - Bild: Xpert.Digital
In einer Zeit, in der die digitale Präsenz eines Unternehmens über seinen Erfolg entscheidet, stellt sich die Herausforderung, wie diese Präsenz authentisch, individuell und weitreichend gestaltet werden kann. Xpert.Digital bietet eine innovative Lösung an, die sich als Schnittpunkt zwischen einem Industrie-Hub, einem Blog und einem Markenbotschafter positioniert. Dabei vereint es die Vorteile von Kommunikations- und Vertriebskanälen in einer einzigen Plattform und ermöglicht eine Veröffentlichung in 18 verschiedenen Sprachen. Die Kooperation mit Partnerportalen und die Möglichkeit, Beiträge bei Google News und einem Presseverteiler mit etwa 8.000 Journalisten und Lesern zu veröffentlichen, maximieren die Reichweite und Sichtbarkeit der Inhalte. Dies stellt einen wesentlichen Faktor im externen Sales & Marketing (SMarketing) dar.
Mehr dazu hier:
Das nächste Kapitel der Robotik: Menschliche Maschinen im Wandel
Schlüsselherausforderungen in der humanoiden Robotik und ihre Zukunft
Trotz der rasanten Fortschritte und des enormen Potenzials steht die humanoide Robotik vor einer Reihe signifikanter technischer, kommerzieller und gesellschaftlicher Herausforderungen, die überwunden werden müssen, um eine breite und erfolgreiche Implementierung zu ermöglichen.
Technische Herausforderungen
Hardware-Limitierungen:
- Batterielebensdauer und Leistungsdichte: Kurze Betriebszeiten (oft nur 2-5 Stunden) und lange Ladezeiten schränken den Dauerbetrieb stark ein. Die für dynamische Aktionen erforderliche hohe Leistungsabgabe ist anspruchsvoll.
- Dexterität und Manipulation: Die Nachbildung der menschlichen Handgeschicklichkeit für feinmotorische Aufgaben und die Handhabung verschiedenster Objekte ist eine große Hürde. Aktuelle Greifer sind oft noch zu einfach. Fortschrittliche taktile Sensoren sind hierfür unerlässlich.
- Aktuatorleistung: Die Balance zwischen Leistung, Geschwindigkeit, Präzision, Effizienz und Kosten bei Aktuatoren bleibt schwierig.
- Sensorrobustheit und -integration: Die Gewährleistung einer zuverlässigen Sensorleistung unter realen Bedingungen und die effektive Fusion von Daten aus verschiedenen Sensortypen stellen Herausforderungen dar.
- Gesamtrobustheit und Zuverlässigkeit: Es muss sichergestellt werden, dass Roboter in anspruchsvollen, unstrukturierten Umgebungen konsistent und ohne häufige Ausfälle funktionieren.
Software- und KI-Komplexität:
- Allgemeine Intelligenz und logisches Denken: Das Erreichen menschenähnlicher Anpassungsfähigkeit, Problemlösungsfähigkeiten und gesunden Menschenverstands in vielfältigen und unvorhersehbaren Situationen ist ein Kernproblem. Aktuelle KI-Systeme können noch “dumme Fehler” machen. Die Herausforderung der “allgemeinen Intelligenz” ist nicht nur ein technisches KI-Problem, sondern eng mit mechanischer Geschicklichkeit und sensorischer Schärfe verbunden. Ein hochintelligenter Roboter mit schlechten physischen Fähigkeiten wird nur begrenzten Nutzen haben und umgekehrt. Dies erfordert einen Co-Design-Ansatz. Damit ein Roboter wirklich universell einsetzbar ist, muss seine KI eine Vielzahl von Aufgaben und Umgebungen verstehen und darüber schlussfolgern können. Die Ausführung dieser Aufgaben erfordert jedoch eine ausgefeilte physische Interaktion – das Greifen verschiedener Objekte, das Navigieren in komplexem Gelände. Wenn die KI einen Plan entwickeln kann, die Hardware (Hände, Beine, Sensoren) ihn aber nicht zuverlässig ausführen oder die Umgebung nicht genau wahrnehmen kann, ist die Intelligenz nutzlos. Dies unterstreicht die Notwendigkeit einer engen Kopplung von KI- und Hardware-Entwicklung, anstatt sie isoliert voneinander zu betreiben.
- Mensch-Roboter-Interaktion (HRI): Die Schaffung einer natürlichen, intuitiven und sicheren HRI, insbesondere mit nicht-fachkundigen Nutzern, ist komplex. LLMs zeigen Potenzial, bringen aber auch neue Komplexitäten mit sich.
- Lerneffizienz und Sim-to-Real-Transfer: Die Entwicklung von Algorithmen, die komplexe Fähigkeiten effizient mit begrenzten realen Daten lernen und gelernte Verhaltensweisen zuverlässig von der Simulation auf physische Roboter übertragen können, ist entscheidend.
- Sicherheit und Vorhersagbarkeit: Die Gewährleistung eines sicheren Betriebs autonomer Systeme, insbesondere in unmittelbarer Nähe zu Menschen, und die Vorhersagbarkeit und Überprüfbarkeit ihres Verhaltens sind unerlässlich. Die “Black-Box”-Natur einiger KI-Modelle gibt hier Anlass zur Sorge.
Herausforderungen bei Kommerzialisierung und Skalierbarkeit
- Kosten: Hohe Stückkosten (je nach Modell und Ausstattung zwischen 20.000 und über 150.000 US-Dollar) und Gesamtbetriebskosten (einschließlich Training, Wartung, Software) sind ein Hindernis. Kostenparität mit menschlicher Arbeit nähert sich für einige gering qualifizierte Tätigkeiten an, ist aber noch nicht universell erreicht. Die hohen Kosten von Humanoiden sind eine Barriere, aber die Gesamtbetriebskosten und das Wertversprechen (einschließlich Faktoren wie 24/7-Betrieb, Sicherheit bei gefährlichen Aufgaben, Adressierung von Arbeitskräftemangel) werden letztendlich den ROI bestimmen. Eine reine Fokussierung auf den Stückpreis ist unzureichend. Obwohl ein Roboter für 100.000 US-Dollar teuer erscheint, könnte sein wirtschaftlicher Wert erheblich sein, wenn er mehrere menschliche Schichten ersetzen, kontinuierlich arbeiten, Fehler reduzieren und Aufgaben ausführen kann, die Menschen nicht können oder wollen. Die ROI-Berechnung muss ganzheitlich erfolgen und Produktivitätssteigerungen, reduzierte Arbeitskosten, verbesserte Sicherheit und erhöhte betriebliche Flexibilität berücksichtigen. Diese differenzierte Betrachtung ist für Unternehmen, die eine Einführung erwägen, entscheidend.
- Return on Investment (ROI): Die Demonstration eines klaren und überzeugenden ROI für Unternehmen, insbesondere im Vergleich zu bestehender spezialisierter Automation oder menschlicher Arbeit, ist eine Herausforderung. Lange Testzyklen in Branchen wie der Logistik (18-30 Monate) verzögern die Entscheidungsfindung.
- Fertigung und Lieferkette: Die Skalierung der Massenproduktion komplexer humanoider Roboter stößt auf Engpässe, z.B. bei der geringen Verfügbarkeit hochpräziser Schrauben. Es besteht eine Abhängigkeit von spezialisierten Komponenten und globalen Lieferketten. Produktionsengpässe bei spezialisierten Komponenten (z.B. hochpräzise Schrauben, Aktuatoren) deuten darauf hin, dass die Lieferkette für Humanoide selbst zu einem wichtigen Bereich für Investitionen und Innovationen werden könnte. Dies könnte potenziell zur Entstehung neuer spezialisierter Komponentenhersteller oder zur vertikalen Integration durch führende Roboter-OEMs führen. Die Massenproduktion von Humanoiden erfordert eine zuverlässige Versorgung mit vielen Spezialteilen. Wenn bestehende Lieferketten für diese Teile (z.B. Präzisionsschrauben) den steigenden Bedarf nicht decken können, wird dies die gesamte Humanoide-Produktion einschränken. Dies schafft eine Chance für neue Unternehmen, als Komponentenlieferanten in den Markt einzutreten, oder für große Akteure wie Tesla, mehr Komponentenfertigung vertikal zu integrieren, um die Versorgung sicherzustellen und die Kosten zu kontrollieren.
- Integration in bestehende Arbeitsabläufe: Die Anpassung von Robotern an bestehende menschenzentrierte Umgebungen und Arbeitsabläufe ohne größere kostspielige Umbauten ist notwendig.
- Öffentliche Akzeptanz und Vertrauen: Gesellschaftliche Bedenken hinsichtlich Arbeitsplatzverlust, Sicherheit, Datenschutz und der allgemeinen Präsenz menschenähnlicher Maschinen müssen überwunden werden.
- Regulatorische und Standardisierungshürden: Es fehlen klare, global harmonisierte Vorschriften und Sicherheitsstandards für fortschrittliche autonome Humanoide.
Wichtige technische und kommerzielle Herausforderungen in der humanoiden Robotik
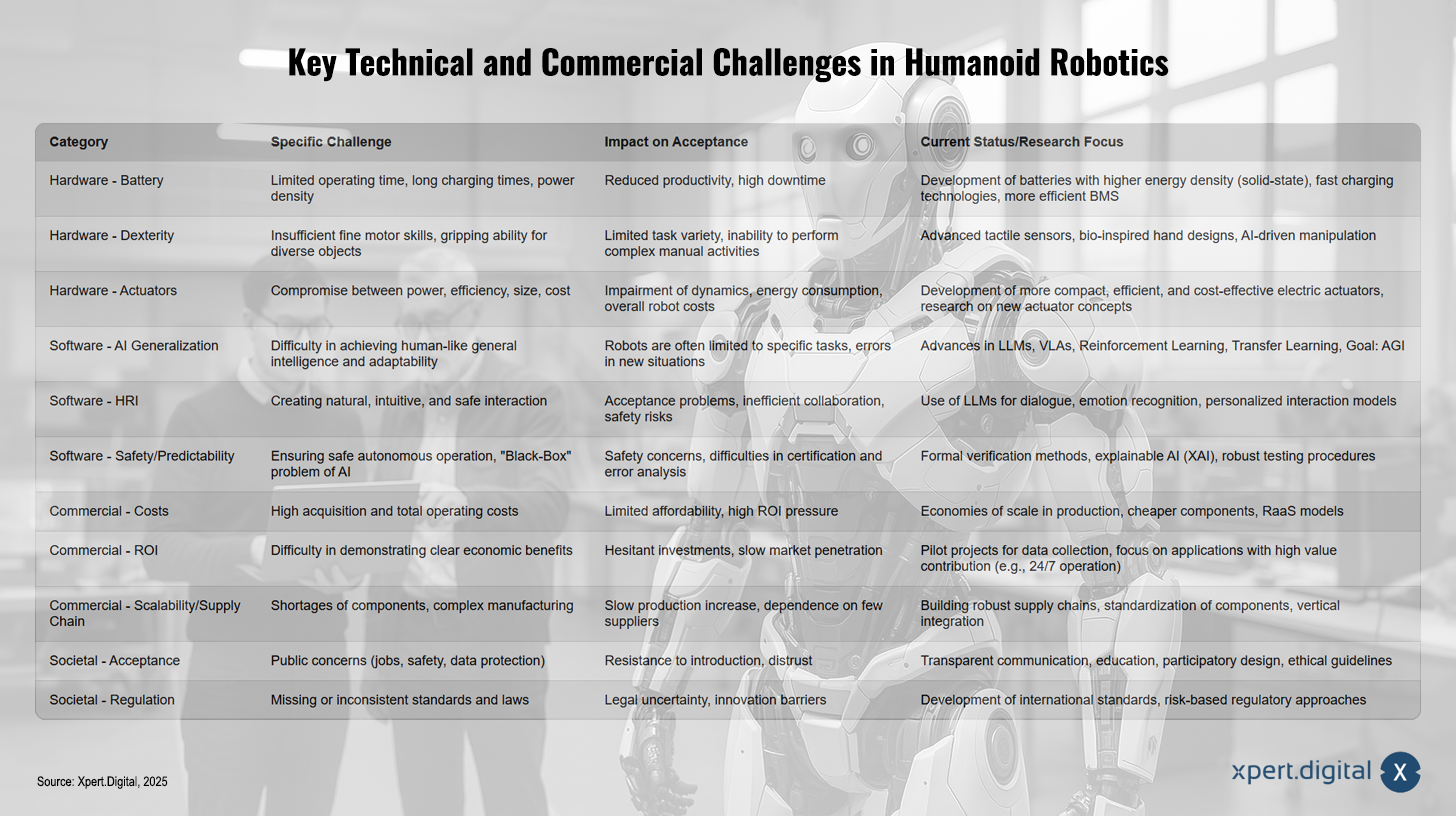
Wichtige technische und kommerzielle Herausforderungen in der humanoiden Robotik – Bild: Xpert.Digital
Wichtige technische und kommerzielle Herausforderungen in der humanoiden Robotik umfassen verschiedene Kategorien, die jeweils spezifische Probleme aufwerfen und Auswirkungen auf die Akzeptanz der Technologie haben. Im Bereich der Hardware gibt es Herausforderungen wie begrenzte Batterielaufzeiten und lange Ladezeiten, die die Produktivität reduzieren und zu hohen Ausfallzeiten führen. Lösungsansätze umfassen die Entwicklung von Batterien mit höherer Energiedichte und Schnellladetechnologien. Ein weiteres Problem ist die unzureichende Feinmotorik und Greiffähigkeit, was die Aufgabenvielfalt einschränkt. Fortschritte bei taktilen Sensoren und bioinspirierten Handdesigns bieten hier mögliche Ansätze. Auch Aktuatoren stehen vor der Herausforderung, Leistung, Effizienz, Größe und Kosten miteinander zu vereinen, was die Dynamik und den Energieverbrauch beeinflusst. Neue Konzepte und kompaktere Aktuatoren sind hier in der Entwicklung.
Auf der Softwareseite liegt eine zentrale Hürde in der Generalisierung der Künstlichen Intelligenz (KI), da menschenähnliche Intelligenz und Anpassungsfähigkeit schwer zu erreichen sind. Fehlende Flexibilität führt dazu, dass Roboter auf spezifische Aufgaben beschränkt bleiben. Fortschritte in Bereichen wie Reinforcement Learning und Transfer Learning zielen darauf ab, diese Probleme zu lösen. Um natürliche, intuitive und sichere Mensch-Roboter-Interaktionen (HRI) zu ermöglichen, wird der Einsatz von KI-Modellen, die Dialoge steuern und Emotionen erkennen, vorangetrieben. Gleichzeitig ist die Sicherheit und Vorhersagbarkeit bei autonomen Systemen ein dringliches Thema, da das sogenannte “Black-Box”-Problem der KI sowohl Sicherheitsbedenken als auch Zertifizierungsprobleme erzeugt. Hier sind erklärbare KI und robuste Testmethoden gefordert.
Im kommerziellen Bereich stellen hohe Anschaffungskosten und die Schwierigkeit, einen klaren Return on Investment (ROI) nachzuweisen, entscheidende Hürden dar. Diese Probleme hemmen Investitionen und die Marktdurchdringung. Lösungen könnten günstigere Komponenten, Pilotprojekte zur Wertanalyse und Robotik-as-a-Service (RaaS)-Modelle sein. Die Skalierbarkeit und Lieferkettenproblematik, verursacht durch Engpässe bei Komponenten und komplexe Fertigungsprozesse, erschwert eine schnelle Produktionssteigerung. Robuste Lieferketten und die Standardisierung von Komponenten werden hier angestrebt.
Gesellschaftlich gibt es Bedenken hinsichtlich Arbeitsplatzverlust, Sicherheit und Datenschutz, die die öffentliche Akzeptanz beeinflussen. Transparente Kommunikation, Bildung und ethische Leitlinien können dazu beitragen, Vorurteile abzubauen. Ebenso stellt die fehlende oder uneinheitliche Regulierung ein Problem dar, das Rechtsunsicherheit und Innovationshemmnisse mit sich bringt. Internationale Standards und risikobasierte Regulierungsansätze sind daher notwendig, um rechtliche Rahmenbedingungen zu schaffen, die mit der technologischen Entwicklung Schritt halten.
Ethische, gesellschaftliche und Governance-Implikationen
Die fortschreitende Entwicklung und zunehmende Verbreitung humanoider Roboter werfen tiefgreifende ethische, gesellschaftliche und regulatorische Fragen auf. Diese reichen von den Auswirkungen auf den Arbeitsmarkt und die Sicherheit bis hin zu Datenschutz, Verantwortung und der grundlegenden Beziehung zwischen Mensch und Maschine. Die ethische Debatte verschiebt sich dabei zunehmend von der Frage, ob wir sie bauen können, hin zu der Frage, wie wir sie verantwortungsvoll integrieren sollten. Dies impliziert eine wachsende Anerkennung ihrer bevorstehenden Ankunft und die Notwendigkeit einer proaktiven, anstatt reaktiven, Governance. Frühere ethische Diskussionen waren oft spekulativ. Angesichts von Pilotprojekten und rasanten KI-Fortschritten werden die Fragen nun praktischer und dringlicher. Quellen wie und diskutieren konkrete Themen wie Verantwortlichkeit, Voreingenommenheit und Datenschutz im Kontext einsetzbarer Systeme. Dieser Wandel deutet auf eine Reifung des Feldes und eine gesellschaftliche Auseinandersetzung mit kurzfristigen Konsequenzen hin.
Kernethische Bedenken
- Arbeitsplatzverdrängung und wirtschaftliche Auswirkungen: Die Automatisierung von Aufgaben, die zuvor von Menschen ausgeführt wurden, kann zu Arbeitslosigkeit oder Lohnstagnation führen, insbesondere in gering qualifizierten Bereichen. Dies erfordert Umschulungsprogramme und soziale Sicherungssysteme.
- Sicherheit und Schutz: Die physische Sicherheit von Menschen, die mit leistungsstarken, autonomen Robotern interagieren, ist von größter Bedeutung. Hinzu kommen Cybersicherheitsrisiken und die Anfälligkeit für Angriffe.
- Privatsphäre und Überwachung: Die Datenerfassung durch Roboter, die mit fortschrittlichen Sensoren (Kameras, Mikrofone) ausgestattet sind, in Wohnungen, an Arbeitsplätzen und im öffentlichen Raum wirft erhebliche Datenschutzbedenken auf. Besondere Sorge bereiten biometrisches Tracking, Gesichtserkennung und Bewegungsanalyse.
- Autonomie, Verantwortung und Rechenschaftspflicht: Die Bestimmung der Haftung, wenn autonome Roboter Schaden verursachen oder Fehler machen, ist komplex. Die “Black-Box”-Natur der KI-Entscheidungsfindung erschwert dies zusätzlich.
- Voreingenommenheit und Diskriminierung (Bias): KI-Systeme können Voreingenommenheiten aus Trainingsdaten übernehmen und perpetuieren, was zu unfairer oder diskriminierender Behandlung in Bereichen wie Gesundheitswesen oder Beschäftigung führen kann.
- Ethik der Mensch-Roboter-Interaktion (HRI):
- Täuschung und Anthropomorphismus: Roboter, die menschenähnlich erscheinen oder Emotionen zeigen, können Benutzer irreführen oder ungesunde Bindungen erzeugen.
- Emotionale Abhängigkeit: Es besteht das Risiko einer übermäßigen Abhängigkeit von Robotern als Begleiter oder zur emotionalen Unterstützung, insbesondere bei vulnerablen Gruppen (ältere Menschen, Kinder).
- Ersatz menschlicher Interaktion: Es gibt Bedenken, dass Roboter den echten menschlichen Kontakt reduzieren könnten.
Die Evolution ethischer Normen für Humanoide wird wahrscheinlich die laufenden Debatten in der allgemeinen KI-Ethik widerspiegeln (und von ihnen beeinflusst werden), jedoch mit der zusätzlichen Komplexität der physischen Verkörperung. Diese physische Präsenz führt zu direkten Sicherheits- und HRI-Bedenken, die bei rein softwarebasierter KI nicht vorhanden sind. Viele ethische Prinzipien für KI (Voreingenommenheit, Transparenz, Rechenschaftspflicht) gelten direkt für Humanoide. Die physische Präsenz eines Humanoiden und seine Fähigkeit, in der Welt zu agieren, bringen jedoch einzigartige Risiken (physischer Schaden) und Interaktionsdynamiken (emotionale Bindung) mit sich. Daher erfordert die Ethik humanoider Roboter einen spezialisierten Fokus, der auf der allgemeinen KI-Ethik aufbaut, diese aber auch erweitert.
Übersicht über ethische und gesellschaftliche Bedenken in der humanoiden Robotik
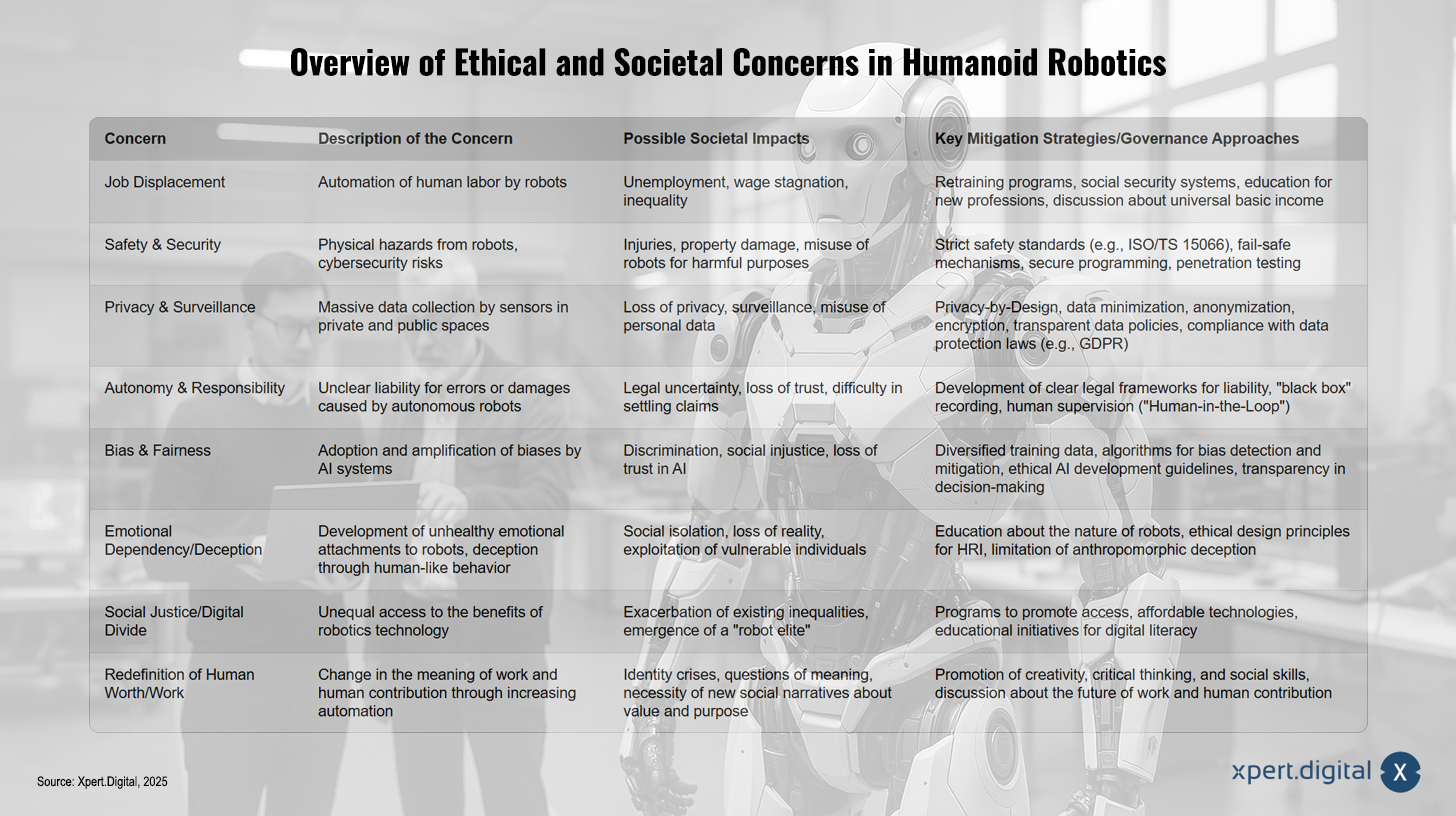
Übersicht über ethische und gesellschaftliche Bedenken in der humanoiden Robotik – Bild: Xpert.Digital
Die ethischen und gesellschaftlichen Bedenken in der humanoiden Robotik lassen sich in mehrere Kategorien unterteilen. Ein zentraler Aspekt ist die Arbeitsplatzverdrängung, die durch die Automatisierung menschlicher Arbeit durch Roboter entstehen kann. Dies könnte zu Arbeitslosigkeit, Lohnstagnation und wachsender Ungleichheit führen. Als Gegenmaßnahmen werden Umschulungsprogramme, soziale Sicherungssysteme, Bildungsinitiativen für neue Berufe sowie die Diskussion über ein bedingungsloses Grundeinkommen vorgeschlagen. Ein weiteres Anliegen ist die Sicherheit und der Schutz, da Roboter physische Gefahren verursachen oder durch Cybersicherheitsrisiken missbraucht werden könnten. Um Verletzungen, Sachschäden oder schädlichen Einsatz zu verhindern, sind strenge Sicherheitsstandards, Fail-Safe-Mechanismen, sichere Programmierung und umfassende Penetrationstests erforderlich.
Die Themen Privatsphäre und Überwachung gewinnen durch die massive Datenerfassung durch robotische Sensoren an Bedeutung, da sie den Verlust der Privatsphäre und die Gefahr von Missbrauch persönlicher Daten mit sich bringen. Schutzmaßnahmen umfassen Privacy-by-Design, Datenminimierung, Anonymisierung, Verschlüsselung sowie transparente Datenrichtlinien und die Einhaltung von Datenschutzgesetzen wie der DSGVO. Die Autonomie und Verantwortung autonomer Roboter werfen Fragen zur Haftung bei Fehlern oder Schäden auf, was Rechtsunsicherheit, Vertrauensverlust und Schwierigkeiten bei der Schadensregulierung nach sich ziehen kann. Klare rechtliche Rahmenbedingungen, „Blackbox“-Aufzeichnungen und menschliche Aufsicht – auch bezeichnet als „Human-in-the-Loop“ – sind essenziell.
Darüber hinaus gibt es Bedenken hinsichtlich Bias und Fairness, da KI-Systeme Vorurteile übernehmen und verstärken können, was zu Diskriminierung und sozialer Ungerechtigkeit führen könnte. Hierzu zählen Strategien wie diversifizierte Trainingsdaten, spezielle Algorithmen zur Bias-Erkennung und -Minderung, ethische KI-Entwicklungsrichtlinien und Transparenz bei der Entscheidungsfindung. Auch die emotionale Abhängigkeit oder Täuschung durch Roboter stellt ein Problem dar, insbesondere wenn diese Menschen durch menschenähnliches Verhalten in die Irre führen und emotionale Bindungen fördern könnten. Die Aufklärung über die wahre Natur von Robotern, ethische Designprinzipien im Bereich der Mensch-Roboter-Interaktion (HRI) sowie die Begrenzung anthropomorpher Täuschungsstrategien sind hier entscheidend.
Weitere gesellschaftliche Auswirkungen betreffen die soziale Gerechtigkeit und die digitale Kluft, da ungleicher Zugang zu robotikbasierten Technologien bestehende Ungleichheiten verschärfen und eine „Roboter-Elite“ entstehen lassen könnte. Bildungsinitiativen zur digitalen Kompetenz, Programme zur Förderung des Zugangs und erschwingliche Technologien sind geeignete Gegenmaßnahmen. Schließlich steht die fortschreitende Automatisierung im Kontext der Neudefinition menschlichen Werts und der Arbeit. Dies könnte Identitätskrisen und Sinnfragen auslösen, während neue gesellschaftliche Narrative über den Wert und Zweck der menschlichen Tätigkeit nötig werden. Die Förderung von Kreativität, kritischem Denken und sozialen Fähigkeiten sowie eine offene Diskussion über die Zukunft der Arbeit sind wichtige Ansätze, um diesen Herausforderungen zu begegnen.
Gesellschaftliche Auswirkungen
- Zukunft der Arbeit: Die Integration humanoider Roboter wird zu einer Transformation von Arbeitsrollen führen, neue Berufsbilder schaffen (z.B. Roboterwartung, KI-Programmierung, Ethik-Beauftragte) und die Notwendigkeit lebenslangen Lernens unterstreichen. Gleichzeitig besteht das Potenzial für erhebliche Produktivitätssteigerungen und Wirtschaftswachstum.
- Soziale Gerechtigkeit und Zugänglichkeit: Es besteht das Risiko, die digitale Kluft zu verschärfen, wenn der Zugang zu vorteilhaften Robotertechnologien ungleich verteilt ist. Gleichzeitig bieten Roboter das Potenzial, die Zugänglichkeit für Menschen mit Behinderungen zu verbessern. Es zeichnet sich ein potenzielles Paradoxon ab: Während Humanoide entwickelt werden, um Arbeitskräftemangel zu lindern und unerwünschte Aufgaben zu übernehmen, könnte ihre weit verbreitete Einführung neue Formen gesellschaftlicher Schichtung schaffen, die auf dem Zugang zu und der Kontrolle über diese Technologien basieren. Dies könnte die digitale Kluft vertiefen, wenn sie nicht gerecht gemanagt wird. Humanoide versprechen, Arbeitskräftelücken zu schließen. Ihre Entwicklung und ihr Einsatz erfordern jedoch erhebliche Kapital- und Fachkenntnisse. Wenn der Zugang zu diesen produktivitätssteigernden Werkzeugen auf wohlhabende Nationen oder große Unternehmen beschränkt bleibt, könnte dies die wirtschaftlichen Ungleichheiten weltweit und innerhalb von Gesellschaften verschärfen. Die Überwindung der digitalen Kluft wird im Zeitalter fortschrittlicher Robotik noch kritischer.
- Öffentliche Wahrnehmung und Vertrauen: Der Aufbau von öffentlichem Vertrauen ist entscheidend für die Akzeptanz. Transparenz bei der Datennutzung, klare Kommunikation und die Adressierung von Sicherheits- und Datenschutzbedenken sind hierfür unerlässlich. Kulturelle Unterschiede in den Erwartungen an HRI und der Akzeptanz von Robotern spielen ebenfalls eine Rolle.
- Neudefinition von menschlichem Wert und Zweck: Wenn Roboter mehr Aufgaben übernehmen, werden gesellschaftliche Diskussionen über den Wert menschlicher Arbeit, Kreativität und sozialer Beziehungen intensiviert.
Governance und Regulierung
Es bedarf robuster rechtlicher und ethischer Rahmenbedingungen, um die Entwicklung und den Einsatz humanoider Roboter zu lenken. Bestehende internationale Sicherheitsstandards (z.B. ISO/TS 15066 für kollaborative Roboter) müssen für fortschrittliche Humanoide weiterentwickelt werden. Prinzipien wie Transparenz, Fairness, Rechenschaftspflicht, menschliche Aufsicht und das Nichtschadensprinzip sind zentral. Privacy-by-Design-Prinzipien und Datenschutzbestimmungen (z.B. DSGVO) sind relevant. Die Schaffung global harmonisierter Vorschriften ist aufgrund unterschiedlicher kultureller Werte und Prioritäten eine Herausforderung. Der AI Act der EU dient als Beispiel für eine risikobasierte Regulierung.
Von Fabrikhalle zu Wohnzimmer: Humanoide im Wandel der Einsatzbereiche – Roadmap (2025-2035 und darüber hinaus)
Die kommenden Jahre und Jahrzehnte versprechen eine kontinuierliche und beschleunigte Entwicklung in der humanoiden Robotik, getrieben durch technologische Durchbrüche und eine wachsende Marktakzeptanz. Die Roadmap zur breiten Einführung ist jedoch nicht linear, sondern wird wahrscheinlich Zyklen von Hype, Ernüchterung und eventueller Produktivität durchlaufen (analog zum Gartner Hype Cycle). Verschiedene Anwendungen werden dabei unterschiedlich schnell reifen. Frühe Erfolge in strukturierten industriellen Umgebungen werden entscheidend sein, um die Finanzierung und nachhaltige Forschung und Entwicklung für komplexere, unstrukturierte Anwendungen zu sichern. Gartner platziert Humanoide derzeit am “Innovation Trigger”, und Forrester stellt ihren rapiden Bedeutungszuwachs fest. Die historische Technologieakzeptanz folgt oft solchen Zyklen. Erste industrielle Einsätze (Automobil, Logistik) werden entscheidende Validierungen und Einnahmen liefern. Wenn diese frühen Anwendungen den ROI-Erwartungen gerecht werden, wird dies weitere Investitionen antreiben, die notwendig sind, um die schwierigeren Herausforderungen im häuslichen oder hochinteraktiven Bereich anzugehen, die auf der Zeitachse weiter entfernt liegen.
Technologien der nächsten Generation
- Sensoren: Kontinuierliche Fortschritte bei visuellen Systemen (höhere Auflösung, bessere KI-Verarbeitung), taktiler Sensorik (größere Empfindlichkeit, Haltbarkeit, Kosteneffizienz) und Propriozeption werden erwartet. Die multimodale Sensorfusion wird eine Schlüsselrolle spielen.
- Aktuatoren: Energieeffizientere, kompaktere und reaktionsschnellere elektrische Aktuatoren werden entwickelt. Mögliche Durchbrüche in der Soft-Robotik-Aktuatorik könnten zu nachgiebigeren und sichereren HRI führen.
- Materialien: Leichtere, stärkere und haltbarere Materialien sind in der Entwicklung. Auch selbstheilende Materialien oder Materialien mit eingebetteten Sensorfunktionen rücken in den Fokus.
- Energiesysteme: Batterien mit höherer Energiedichte (z.B. Festkörperbatterien), schnellere Ladezeiten und verbesserte Batteriemanagementsysteme (BMS) sind entscheidend für längere Betriebszeiten und erhöhte Sicherheit.
- KI und Allgemeine Intelligenz: Fortschritte in Richtung Künstlicher Allgemeiner Intelligenz (AGI) werden Robotern ermöglichen, komplexere Aufgaben mit weniger Daten zu lernen, abstrakt zu denken, Kontexte tiefgreifend zu verstehen und gesunden Menschenverstand zu zeigen. VLAs und multimodale Modelle werden ausgefeilter. Die langfristige Vision von AGI in Humanoiden wird ein fundamentales Umdenken der Mensch-KI-Beziehungen erfordern und potenziell zu neuen Formen der Zusammenarbeit, Co-Abhängigkeit und sogar zu gesellschaftlichen Strukturen führen, die aus heutiger Sicht schwer vorhersehbar sind. AGI impliziert Roboter mit menschenähnlichem Lernen und Denken. Wenn Humanoide dies erreichen, werden sie mehr als nur Werkzeuge; sie werden zu Partnern oder sogar autonomen Agenten. Dies wirft tiefgreifende Fragen über ihre Rolle in der Gesellschaft, ihre Entscheidungsbefugnis und die Natur von “Arbeit” und “Intelligenz” auf. Die erforderlichen gesellschaftlichen Anpassungen wären weitaus umfangreicher als die für aktuelle Narrow-AI-Anwendungen.
Projizierte Meilensteine und Zeitpläne für die Einführung
- Kurzfristig (2025-2027):
- Zunehmende Pilotprojekte in der Automobilindustrie und Logistik. Tesla und BYD planen den Einsatz von Tausenden von Einheiten in den Jahren 2025-2026.
- Erste kommerzielle Einführung für spezifische, klar definierte Aufgaben in diesen Sektoren.
- Fokus auf Verbesserung der Zuverlässigkeit, Kostensenkung und Nachweis eines klaren ROI in industriellen Umgebungen.
- Der Einsatz von Humanoiden in der Logistik wird voraussichtlich 2026-2027 an Fahrt aufnehmen.
- Mittelfristig (2028-2033):
- Ausweitung auf komplexere Aufgaben in industriellen Umgebungen.
- Breitere Akzeptanz in anderen kommerziellen Dienstleistungsumgebungen (Einzelhandel, Gastgewerbe) und spezialisierten Rollen im Gesundheitswesen.
- Reifung von RaaS-Modellen, was die Zugänglichkeit erhöht.
- Signifikante Verbesserungen bei Dexterität, Batterielebensdauer und KI-Fähigkeiten.
- Potenzial für begrenzten, überwachten Einsatz in der häuslichen/persönlichen Assistenz für spezifische Aufgaben.
- Langfristig (2034-2040+):
- Weit verbreitete Einführung in zahlreichen Branchen und potenziell in Privathaushalten für allgemeine Assistenzaufgaben.
- Humanoide Roboter, die zu autonomeren Entscheidungen fähig sind und in stark unstrukturierten Umgebungen operieren können.
- Engere Integration in die menschliche Gesellschaft, was potenziell zu erheblichen Transformationen des Arbeitsmarktes und einer Neudefinition von Arbeit führt.
- Morgan Stanley prognostiziert 8 Millionen arbeitende Humanoide in den USA bis 2040 und 63 Millionen bis 2050.
Transformatives Potenzial und langfristige Vision
Humanoide Roboter werden als Allzweckwerkzeuge gesehen, die menschliche Fähigkeiten in nahezu allen Sektoren erweitern können. Sie haben das Potenzial, große gesellschaftliche Herausforderungen wie Arbeitskräftemangel, alternde Bevölkerungen, gefährliche Arbeiten anzugehen und die Lebensqualität zu verbessern. Viele sehen den “iPhone-Moment” für die Robotik gekommen, der zu einer Massenakzeptanz und einer neuen Ära der Mensch-Maschine-Kollaboration führt. Das wirtschaftliche Potenzial ist enorm, mit der Aussicht auf Produktivitätssteigerungen und BIP-Wachstum. Die langfristige Vision beinhaltet Roboter, die nahtlos in den Alltag integriert sind, eine breite Palette von Aufgaben ausführen und natürlich mit Menschen interagieren. Die Entwicklung von “General Purpose Humanoids” ist das Streben nach einer “universellen physischen Schnittstelle”. Sollte dies erreicht werden, könnte dies viele Formen physischer Arbeit und spezialisierter Roboterhardware kommodifizieren, ähnlich wie Allzweckcomputer spezialisierte Rechenmaschinen kommodifiziert haben. Das Ziel ist ein Roboter, der viele Aufgaben ausführen kann. Wenn eine einzige humanoide Plattform durch fortschrittliche KI und anpassungsfähige Hardware Aufgaben ausführen kann, die derzeit mehrere spezialisierte Roboter oder menschliche Arbeitskräfte erfordern, stellt dies einen Paradigmenwechsel dar. Diese “Universalität” könnte zu Skaleneffekten in der Produktion führen und den Bedarf an verschiedenen Arten spezialisierter Automatisierungsgeräte erheblich reduzieren, was den Robotikmarkt und die Arbeitsökonomie grundlegend verändern würde.
Passend dazu:

Von Science-Fiction zur Realität: Die Ära der humanoiden Roboter beginnt
Die humanoide Robotik befindet sich an einem entscheidenden Punkt ihrer Entwicklung. Angetrieben durch signifikante Fortschritte in der künstlichen Intelligenz, verbesserte Hardwarekomponenten und eine wachsende Marktnachfrage, bewegen sich diese menschenähnlichen Maschinen von reinen Forschungsobjekten hin zu greifbaren Lösungen für reale Probleme in Industrie, Gesundheitswesen und darüber hinaus. Die Vision von Robotern, die nahtlos mit Menschen zusammenarbeiten und Aufgaben in für Menschen gestalteten Umgebungen übernehmen, rückt näher an die Realität heran.
Die Analyse hat gezeigt, dass die technologischen Grundlagen, insbesondere in den Bereichen Aktuatorik, Sensorik, Energieversorgung und KI-basierte Steuerung, rapide Fortschritte machen. Gleichzeitig stellen die Komplexität der Nachbildung menschlicher Geschicklichkeit und Intelligenz, die hohen Kosten, die Skalierbarkeit der Produktion und die Gewährleistung von Sicherheit und Zuverlässigkeit weiterhin erhebliche Herausforderungen dar. Der Markt zeigt ein enormes Wachstumspotenzial, wie die vielfältigen Prognosen belegen, doch die Geschwindigkeit der breiten kommerziellen Einführung wird davon abhängen, wie effektiv diese Hürden genommen werden.
Die ethischen und gesellschaftlichen Implikationen sind tiefgreifend und erfordern eine proaktive Auseinandersetzung. Fragen der Arbeitsplatzverdrängung, des Datenschutzes, der Verantwortung und der Sicherheit müssen ebenso adressiert werden wie die subtileren Aspekte der Mensch-Roboter-Interaktion und der öffentlichen Akzeptanz. Eine verantwortungsvolle Innovation, die auf einer breiten Zusammenarbeit zwischen Industrie, Wissenschaft, Regierung und der Öffentlichkeit basiert, sowie eine vorausschauende Governance sind unerlässlich, um sicherzustellen, dass die Entwicklung und der Einsatz humanoider Roboter dem Wohl der Gesellschaft dienen.
Zusammenfassend lässt sich sagen, dass humanoide Roboter das Potenzial haben, Arbeit, Gesellschaft und das tägliche Leben in den kommenden Jahrzehnten tiefgreifend zu verändern. Der Weg von der Science-Fiction zur alltäglichen Realität ist zwar noch mit Herausforderungen gepflastert, doch die Dynamik des Fortschritts ist unverkennbar. Die erfolgreiche Integration dieser Technologien wird ein ausgewogenes Verhältnis zwischen technologischem Ehrgeiz, wirtschaftlicher Rentabilität und ethischer Verantwortung erfordern. Die kommenden Jahre werden entscheidend dafür sein, ob und wie dieses transformative Potenzial voll ausgeschöpft werden kann, wobei der Übergang von spezialisierten Anwendungen zu allgemeineren Fähigkeiten einen Schlüsselmeilenstein darstellen wird.
Wir sind für Sie da - Beratung - Planung - Umsetzung - Projektmanagement
☑️ KMU Support in der Strategie, Beratung, Planung und Umsetzung
☑️ Erstellung oder Neuausrichtung der Digitalstrategie und Digitalisierung
☑️ Ausbau und Optimierung der internationalen Vertriebsprozesse
☑️ Globale & Digitale B2B-Handelsplattformen
☑️ Pioneer Business Development

Konrad Wolfenstein
Gerne stehe ich Ihnen als persönlicher Berater zur Verfügung.
Sie können mit mir Kontakt aufnehmen, indem Sie unten das Kontaktformular ausfüllen oder rufen Sie mich einfach unter +49 89 89 674 804 (München) an.
Ich freue mich auf unser gemeinsames Projekt.
Schreiben Sie mir

Xpert.Digital - Konrad Wolfenstein
Xpert.Digital ist ein Hub für die Industrie mit den Schwerpunkten, Digitalisierung, Maschinenbau, Logistik/Intralogistik und Photovoltaik.
Mit unserer 360° Business Development Lösung unterstützen wir namhafte Unternehmen vom New Business bis After Sales.
Market Intelligence, Smarketing, Marketing Automation, Content Development, PR, Mail Campaigns, Personalized Social Media und Lead Nurturing sind ein Teil unserer digitalen Werkzeuge.
Mehr finden Sie unter: www.xpert.digital - www.xpert.solar - www.xpert.plus
In Kontakt bleiben


















