
V současné době největší studie humanoidní robotiky od Xpert.Digital-Marktboom dopředu: od prototypů robotů po praxi
Předběžná verze Xpert

Available in 27 languages 📢
Preferujte Xpert.Digital na GoogluⓘPublikováno: 13. května 2025 / Aktualizováno: 13. května 2025 – Autor: Konrad Wolfenstein

Aktuálně největší studie humanoidní robotiky od Xpert.Digital – čeká nás boom trhu: Od prototypů robotů k praktickému využití – Obrázek: Xpert.Digital
Humanoidní robotika: Klíč k nové průmyslové revoluci? (Doba čtení: 52 min / Bez reklam / Bez paywallu)
Pro management: Překonávání nesouladu – Proč integrované strategie předurčují robotům cestu
Humanoidní robotika se nachází v bodě zlomu a přechází od výzkumných prototypů k počátečním komerčním implementacím, zejména v průmyslovém prostředí. Tento rychlý rozvoj je do značné míry poháněn pokrokem v oblasti umělé inteligence (AI), zejména vtělené AI, modelů velkých jazyků (LLM) a modelů vidění-jazyk-akce (VLA), jakož i hardwarovými inovacemi. Tržní prognózy naznačují značný růst s odhady od 30 miliard dolarů do více než 200 miliard dolarů do roku 2035. Oblasti použití jsou rozmanité a sahají od průmyslu a zdravotnictví až po systémy osobní asistence. Navzdory obrovskému potenciálu přetrvávají značné výzvy v oblastech, jako je technologie baterií, manuální zručnost, nákladová efektivita, škálovatelnost a etické řízení. Konvergence klesajících nákladů na hardware, zlepšování AI a rostoucího nedostatku pracovních sil vytváří jakousi „dokonalou bouři“, která upřednostňuje urychlené přijetí humanoidních robotů. To by mohlo vést k rychlejší návratnosti investic (ROI) v cílených průmyslových aplikacích, než předpovídají některé konzervativní odhady, což by následně vedlo k rychlejším cyklům přijetí v těchto oblastech. Firmy budou mít stále větší motivaci k zavádění automatizačních řešení a humanoidní roboti díky své všestrannosti nabízejí adaptabilní řešení pro prostředí zaměřená na člověka.
Dvojí zaměření na vývoj univerzální umělé inteligence a vysoce specializovaných hardwarových komponent (akční členy, senzory) vede ke složité souhře. Pokrok v jedné oblasti může být brzděn úzkými hrdly v druhé, což naznačuje, že pro lídry na trhu budou klíčové holistické, integrované strategie vývoje. Sofistikovaná umělá inteligence například nemůže plně kompenzovat nedostatečnou mechanickou obratnost nebo omezenou provozní dobu v důsledku nedostatku baterií. Naopak pokročilý hardware nemůže dosáhnout svého plného potenciálu bez dostatečně inteligentního softwaru. Společnosti, které dokáží vyvíjet hardware a umělou inteligenci společně, jako je tomu v případě vertikální integrace společnosti Tesla, by proto mohly mít konkurenční výhodu.
Tato dekáda (2025–2035) slibuje transformační éru humanoidních robotů, kteří mají potenciál zásadně změnit práci, společnost a každodenní život.
Vhodné pro:

Technologické průlomy: Jak humanoidní roboti mění naše životy
Humanoidní robotika se stala jednou z nejdynamičtějších a potenciálně transformačních technologických oblastí 21. století. Na průsečíku umělé inteligence, pokročilé mechaniky, elektroniky a materiálové vědy slibují humanoidní roboti zásadní změnu způsobu, jakým lidé pracují, interagují a žijí. Tato studie poskytuje komplexní analýzu současného stavu, historického vývoje, technologických základů, rozmanitých aplikací, tržní krajiny, klíčových výzev a perspektiv budoucího vývoje humanoidních robotů se zvláštním zaměřením na období do roku 2025 a dále.
Definice humanoidního robota
Humanoidní robot je podle definice robot, jehož vnější tvar připomíná lidské tělo a obvykle má trup, hlavu, dvě paže a dvě nohy. Tato lidská forma není pouze estetickým prvkem, ale často slouží i funkčním účelům, jako je interakce s nástroji a prostředím určeným pro lidi, nebo experimentálním účelům, například výzkumu bipedálního pohybu.
Akademické definice jdou nad rámec pouhé fyzické podobnosti a zdůrazňují, že humanoidní roboti jsou pečlivě navrženi tak, aby napodobovali nejen lidský vzhled, ale i lidské chování. To zahrnuje replikaci funkcí, jako je vnímání, rozhodování a interakce. Díky svému antropomorfnímu designu nabízejí inherentní výhody v prostředí zaměřeném na člověka, což umožňuje přirozenější interakci a větší přizpůsobivost než jiné formy robotů. Schopnost pohybovat se v prostorech navržených člověkem a používat nástroje určené pro lidi je klíčovým aspektem jejich funkčnosti a rostoucí užitečnosti.
Samotná definice „humanoida“ podléhá evoluci. Původně se důraz kladl především na fyzickou formu. Novější akademické úvahy a technologický pokrok však stále více přesouvají toto zaměření k napodobování chování a kognitivních funkcí. Tento vývoj je významně ovlivněn pokrokem v umělé inteligenci. Humanoidní roboti sice nejen vypadají jako lidé, ale také stále častěji „jednají“ a „uvažují“ lidským způsobem, což snižuje interakční bariéry, ale zároveň vyvolává hlubší etické otázky týkající se klamání, emocionálního pouta a povahy inteligence.
Význam a rozsah studie
Humanoidní robotika představuje kritickou technologickou hranici a ztělesňuje konvergenci různých vědeckých a technických oborů. Její potenciál revolucionizovat průmyslová odvětví, řešit nedostatek pracovních sil, pomáhat s nebezpečnými úkoly a zlepšovat každodenní život je obrovský. „Funkční účel“ humanoidního designu – interakce s lidskými nástroji a prostředím – se stává primárním ekonomickým motorem. Tato přizpůsobivost znamená, že společnosti mohou integrovat humanoidní roboty do stávajících pracovních postupů s menším narušením a kapitálovými výdaji, než by bylo nutné k přepracování továren nebo skladů pro specializované roboty. Tato inherentní výhoda je silným prodejním argumentem, jak dokazují pilotní programy v automobilovém a logistickém průmyslu, a působí jako silný katalyzátor pro jejich přijetí.
Tato studie si klade za cíl poskytnout komplexní analýzu současného stavu (kolem roku 2025), historického kontextu, technologických základů, aplikací, tržní situace, výzev a budoucích vývojových cest humanoidní robotiky. Jejím cílem je sloužit jako spolehlivý zdroj pro výzkumníky, vývojáře, tvůrce politik, investory a širokou veřejnost k pochopení složitosti a dalekosáhlých důsledků této nově vznikající technologie.
Historický vývoj humanoidní robotiky
Fascinace umělými bytostmi, které se podobají lidem, sahá daleko do historie a významně ovlivnila vývoj humanoidní robotiky. Od starověkých mýtů až po dnešní vysoce pokročilé stroje, lidské úsilí replikovat inteligenci a pohyb v lidské podobě zahrnuje široké spektrum.
Rané koncepty a automaty
Myšlenku umělých bytostí podobných člověku lze nalézt ve starověkých mýtech, jako jsou ty o Héfaistovi, který stvořil mechanické sluhy, nebo o Pygmaliónovi, jehož socha ožila. Rané mechanické konstrukce, známé jako automaty, svědčí o tomto raném zájmu. Mezi příklady patří egyptské vodní hodiny s pohyblivými lidskými postavami, které odbíjely hodiny, mechanickí ptáci a koně čínského inženýra krále Šu-ce (kolem roku 400 př. n. l.) a programovatelné hudební automaty Al-Džazárího ve 12. století. Do této série raných konceptů patří i náčrty mechanického rytíře Leonarda da Vinciho z konce 15. století, schopného pohybovat rukama, hlavou a čelistí. Tyto rané příklady demonstrují dlouhodobou lidskou fascinaci vytvářením umělých bytostí a položily koncepční základ pro pozdější vývoj.
Historické milníky ve vývoji robotů (před rokem 1970 a důležité teoretické/rané praktické kroky ve 20. století)

Historické milníky ve vývoji robotů (před rokem 1970 a důležité teoretické/rané praktické kroky ve 20. století) – Obrázek: Xpert.Digital
Historický vývoj robotiky před rokem 1970 je charakterizován řadou milníků a teoretických pokroků. Již v roce 3500 př. n. l. popisovaly mýty o Héfaistovi a Pygmaliónovi v řecké mytologii rané koncepty inteligentních mechanismů a umělých bytostí. Kolem roku 1500 př. n. l. vyvinuli Egypťané vodní hodiny s humanoidními postavami, které představovaly první kroky k mechanické automatizaci. V roce 1206 n. l. zkonstruoval Ismail al-Džazárí ranou formu programovatelného humanoidního robota se svým Hudebníkovým člunem. V roce 1495 n. l. načrtl Leonardo da Vinci mechanického rytíře schopného se posadit a pohybovat hlavou a pažemi. V roce 1769 vyvinul Wolfgang von Kempelen „Mechanického Turka“, humanoidně vypadající automat, který uměl hrát šachy, ačkoli byl ovládán skrytým člověkem.
V letech 1920/1921 zavedl Karel Čapek ve své hře „RUR“ termín „robot“, inspirovaný českým slovem „robota“, které se překládá jako „nucená práce“. Na světové výstavě v roce 1939 představila společnost Westinghouse Electric robota „Elektro“, který uměl mluvit a reagovat na povely. Ve 40. letech 20. století vyvinul George Devol průmyslového robota „Unimate“, který způsobil revoluci v průmyslové výrobě automatizací opakujících se úkolů. V roce 1942 formuloval Isaac Asimov ve svých sci-fi příbězích známé „tři zákony robotiky“, které poskytly etické zásady pro interakci s roboty.
V roce 1948 publikoval Norbert Wiener své průlomové dílo „Kybernetika“, které se zabývalo řízením a komunikací ve strojích a živých bytostech, a tím významně ovlivnilo vývoj robotiky. Ve stejném roce vytvořil William Grey Walter autonomní roboty „Elmer“ a „Elsie“, kteří dokázali reagovat na změny prostředí. Nakonec v roce 1950 představil Alan Turing Turingův test, koncept určený k posouzení schopnosti stroje projevovat inteligentní chování nerozeznatelné od chování člověka.
20. století: Úsvit moderní robotiky
20. století znamenalo počátek moderní robotiky, charakterizované teoretickými základy a prvními praktickými aplikacemi. Termín „robot“ zavedl v letech 1920/1921 Karel Čapek ve své hře „RUR (Rossumův univerzální robot)“, odvozené z českého slova „robota“, což znamená nucená práce. Dřívějším známým humanoidním robotem byl „Electro“, kterého představila společnost Westinghouse na světové výstavě v New Yorku v roce 1939. Dokázal reagovat na hlasové povely a mluvit jednoduché věty. Isaac Asimov významně přispěl k etické diskusi svými „Třemi zákony robotiky“ (1942) a popularizoval termín „robotika“ jako vědu o robotech. Současně průkopníci jako Norbert Wiener se svou prací o kybernetice (1948) a William Grey Walter se svými ranými autonomními roboty (1948) položili důležité teoretické a praktické základy. Publikace Turingova testu (1950) Alanem Turingem poskytla koncepční rámec pro hodnocení strojové inteligence. Ačkoli se nejednalo o humanoidního robota, vývoj prvního průmyslového robota Unimate, který ve 40. až 60. letech 20. století vytvořil George Devol, představoval klíčový krok v oblasti automatizačních technologií a způsobil revoluci v průmyslové výrobě. Toto období se vyznačovalo intenzivní literární a vědeckou debatou o sociálních, etických a technologických výzvách robotiky.
Klíčové milníky po roce 1970: Vzestup funkčních humanoidů
Po roce 1970 začala éra funkčních humanoidních robotů, kteří byli schopni plnit stále složitější úkoly.
- WABOT-1 (1972-1973, Univerzita Waseda): Tento robot je považován za prvního plně funkčního, inteligentního humanoidního robota na světě. WABOT-1, vyvinutý s cílem vytvořit „osobního robota“, dokázal chodit, komunikovat s člověkem v japonštině, měřit vzdálenosti a směry k objektům pomocí umělých očí a uší a uchopovat a nosit předměty rukama.
- WABOT-2 (1984, Univerzita Waseda): WABOT-2, navržený jako „speciální robot“, byl humanoidní hudebník, který uměl číst noty a hrát na elektronické varhany.
- Honda řady E (1986-1993) a řady P (1993-1997): Honda byla průkopníkem v oblasti bipedálního pohybu. Řada E sloužila základnímu výzkumu, zatímco řada P vedla k pokročilejším prototypům. P2 (1996) byl první samoregulační bipedální robot a P3 (1997) byl první plně nezávislý bipedální humanoidní robot schopný chůze bez externích kabelů.
- ASIMO (2000, Honda): Jako jedenáctý bipedální humanoidní robot od Hondy byl ASIMO schopen běhat, interagovat a vykonávat poloautonomní úkoly. Vylepšená verze byla představena v roce 2011. ASIMO byl uveden do Síně slávy robotů v roce 2004. Vývoj byl ukončen v roce 2018 a ASIMO byl oficiálně vyřazen z provozu v roce 2022. Ukončení projektů, jako je ASIMO, nemusí nutně signalizovat selhání, ale často strategické přesměrování směrem k praktičtějším nebo ekonomicky životaschopnějším aplikacím. To odráží zralost trhu, kde investice do výzkumu a vývoje musí být stále více sladěny se specifickými potřebami a ziskovostí trhu.
- Řada HRP (Japonsko, AIST/Kawada): Projekt Humanoid Robotics Project (HRP) začal s upravenými roboty Honda P3 a dále je rozvíjel. HRP-2 (2002) byl dvounohý chodící robot. HRP-4C „Miim“ (2009) byl robot navržený ženou, který uměl zpívat a tančit.
- Actroid (2003, Univerzita v Ósace/Kokoro): Tento robot se vyznačoval realistickou silikonovou kůží a zaměřením na lidský vzhled.
- HUBO (2005, KAIST): Byl prvním chodícím humanoidním robotem v Jižní Koreji.
- Nao (2006, Aldebaran Robotics/SoftBank): Malý programovatelný humanoidní robot s open-source přístupy, který našel široké uplatnění ve výzkumu a výuce.
- Atlas (2013–současnost, Boston Dynamics): Atlas, původně vyvinutý pro DARPA Robotics Challenge, je vysoce dynamický humanoidní robot schopný provádět složité pohyby, jako je chůze, běh, skákání a salta vzad. Plně elektrická verze se zvýšenou obratností byla představena v dubnu 2024. DARPA Robotics Challenge sloužila jako klíčový katalyzátor, posouvající hranice humanoidních schopností v katastrofických scénářích a podporující inovace, které se nyní promítají do komerčních produktů. Pokročilá mobilita a robustnost vyvinuté pro tyto výzvy jsou nyní charakteristickými znaky komerčních nebo téměř sériově vyráběných robotů.
- Valkyrie (2013, NASA): Valkyrie, vyvinutá také pro DARPA Robotics Challenge, byla navržena pro použití v poškozeném, uměle vytvořeném prostředí a má potenciál pro vesmírné mise.
- Nedávný významný vývoj (po roce 2020):
- Ameca (Engineered Arts, 2022): Známá pro svou extrémně expresivní tvář.
- Optimus (Tesla, 2022): Univerzální humanoid určený pro použití ve výrobě a potenciálně i v domácnostech.
- Unitree G1 (2024): Relativně levný humanoidní robot.
- Obrázek 01/02 (obrázek AI): Univerzální humanoidi, kteří jsou již testováni v rámci průmyslových pilotních projektů.
Historický vývoj ukazuje jasný posun od základního výzkumu vedeného univerzitami (např. rané práce Wasedy a Hondy) ke komerčně řízenému vývoji se specifickými aplikačními cíli (např. Tesla Optimus pro výrobu, Agility Digit pro logistiku). To naznačuje rostoucí vyspělost oboru a jeho rostoucí ekonomickou životaschopnost.
Klíčové technologie a komponenty
Schopnosti humanoidních robotů jsou založeny na komplexní souhře různých klíčových technologií a komponent. Ty sahají od mechanických systémů, které zajišťují pohyb a strukturu, přes pokročilé senzory pro vnímání prostředí až po sofistikovaný software a architektury umělé inteligence, které umožňují řízení, učení a interakci. Vývoj v každé z těchto oblastí je klíčový pro pokrok humanoidní robotiky jako celku.
Mechanické systémy
Mechanické systémy tvoří fyzický základ humanoidních robotů a zahrnují aktuátory pro pohyb, materiály pro konstrukci a energetické systémy pro provoz.
Pohony
Aktuátory jsou motory zodpovědné za pohyb uvnitř robota a napodobují funkci lidských svalů a kloubů. Ideální aktuátory by měly mít vysokou hustotu výkonu, nízkou hmotnost a malé rozměry.
- Elektrické aktuátory: Jedná se o nejběžnější typ a obvykle menší. U kloubů lidské velikosti však může být k vygenerování dostatečné síly zapotřebí více elektrických aktuátorů na kloub (např. HRP-2). Pokroky v permanentních magnetech (např. neodym-železo-bor) výrazně zvýšily hustotu výkonu elektromotorů, čímž se zmenšila mezera oproti hydraulickým systémům. Elektrické aktuátory se vyznačují vysokou účinností (75–80 %), menším počtem součástí a nižšími nároky na údržbu ve srovnání s hydraulickými systémy. Trend směrem k elektrickým aktuátorům, a to i u vysoce dynamických robotů, jako je nový Atlas, signalizuje vyspělost trhu zaměřenou na komerční životaschopnost (účinnost, údržba, náklady) spíše než na surový špičkový výkon. To urychlí jejich přijetí v průmyslových a potenciálně spotřebitelských aplikacích.
- Hydraulické pohony: Ty nabízejí vyšší výkon a lepší regulaci točivého momentu, ale mohou být velmi objemné (např. původní Atlas). Elektrohydraulické pohony (EHA) nabízejí řešení pro zmírnění tohoto problému s velikostí. Hydraulické systémy vykazují vysokou odolnost proti nárazům, ale mají nižší účinnost (40–55 %) a vyžadují více údržby.
- Pneumatické aktuátory: Fungují na základě stlačitelnosti plynů; známým příkladem je McKibbenův sval.
Například Kawasaki vyvíjí „Hydro Servo Muscle“, elektrohydraulický pohon navržený tak, aby nabízel vysokou odolnost proti nárazům a hustotu výkonu pro svého humanoidního robota Kaleido. Rozhodnutí společnosti Boston Dynamics vyrobit nový Atlas plně elektrický naznačuje trend směrem ke komercializaci a širšímu využití.
Srovnávací analýza technologií aktuátorů pro humanoidní roboty
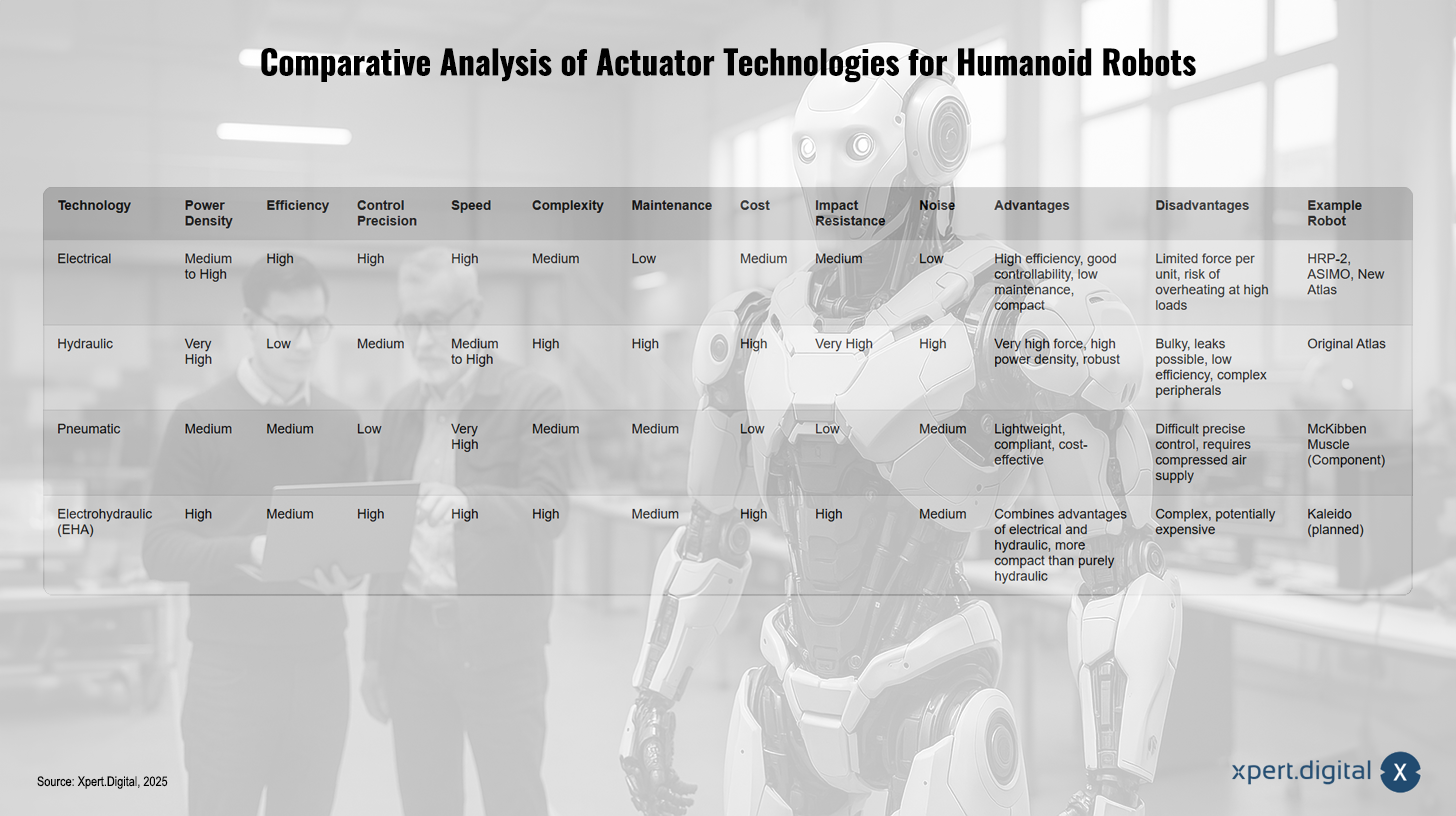
Srovnávací analýza technologií aktuátorů pro humanoidní roboty – Obrázek: Xpert.Digital
Srovnávací analýza technologií aktuátorů pro humanoidní roboty ukazuje, že elektrické aktuátory nabízejí vysokou účinnost, dobrou ovladatelnost, nízké nároky na údržbu a kompaktnost, ale jsou omezené maximální silou a přehříváním – příklady zahrnují HRP-2, ASIMO a nový Atlas. Hydraulické aktuátory nabízejí velmi vysokou sílu, vysokou hustotu výkonu a robustnost, ale jsou objemné, neefektivní, náchylné k netěsnostem a vyžadují složité periferie, jak dokazuje původní Atlas. Pneumatické aktuátory jsou atraktivní díky své lehkosti, poddajnosti a cenové efektivitě, ale je obtížné je přesně ovládat a vyžadují přívod stlačeného vzduchu; příkladem je McKibbenův sval. Elektrohydraulické aktuátory (EHA) kombinují silné stránky elektrických a hydraulických pohonů, jsou kompaktnější než čistě hydraulické systémy, ale jsou složité a potenciálně drahé, jak je tomu u plánovaného Kaleida.
Materiály a konstrukční řešení
Lehké konstrukce jsou klíčové pro flexibilitu, energetickou účinnost a prodlouženou životnost baterií humanoidních robotů. Vysoký poměr zatížení k hmotnosti a vysoká strukturální tuhost jsou žádoucí. Metody evoluční strukturální optimalizace (ESO) se používají k významnému snížení hmotnosti rámových konstrukcí (v jedné studii o 50,15 %) bez kompromisů v tuhosti nebo vibračních vlastnostech. Mezi použité materiály patří slitiny hořčíku a polymerní pryskyřice, jaké se používají v modelu ASIMO.
Energetické systémy (baterie)
Napájení je jednou z největších výzev. Běžně se používají lithium-iontové (Li-ion) a lithium-železitophosfátové (LiFePO₄) baterie. Například Tesla Optimus používá systém s kapacitou 2,3 kWh a napětím 52 V, zatímco Unitree H1 používá baterii s kapacitou 15 Ah (0,864 kWh). Baterie Valkyrie má kapacitu 1,8 kWh a umožňuje provozní dobu přibližně jednu hodinu.
Klíčovými výzvami jsou omezená hustota energie, která vede ke krátkým provozním dobám; vysoký výkon potřebný pro dynamické akce; pomalá rychlost nabíjení (průmyslové aplikace často vyžadují ~20 hodin provozu, zatímco v současnosti je to spíše 4-6 hodin); a bezpečnost baterií v extrémních podmínkách prostředí. Pokrok se očekává v oblasti polopevnostních a polovodičových baterií, které slibují vyšší energetickou hustotu (např. Xinwangda s 500 Wh/kg, Farasis Energy s >330 Wh/kg, REPT s >400 Wh/kg). Důležité jsou také technologie rychlého nabíjení.
Vhodné pro:

Senzorické a percepční systémy
Humanoidní roboti musí přesně vnímat své okolí, aby mohli bezpečně a efektivně interagovat. Vnímání hraje zásadní roli v umožnění bezproblémové interakce s lidmi a prostředím. Spoléhání se pouze na vizuální systémy je pro složité manipulace a bezpečné interakce v přeplněném nebo skrytém prostředí nedostatečné. Propriocepce a hmatové vnímání se proto stávají dalšími významnými oblastmi senzorické technologie pro humanoidy. Omezení vizuálního vnímání v úkonech, jako je uchopení skrytých předmětů nebo aplikace přesných sil, pohánějí značné úsilí ve výzkumu a vývoji těchto dalších senzorických modalit. Úspěchy v těchto oblastech odemknou novou úroveň manipulačních schopností.
Vizuální systémy
Pro snímání prostředí, detekci objektů a navigaci se používají kamery (RGB, hloubkové kamery), LiDAR, radar a ultrazvukové senzory. Tesla Optimus se silně spoléhá na kamery (vícekamerové uspořádání podobné vozidlům), zatímco Boston Dynamics Atlas používá LiDAR, hloubkové a RGB senzory. Valkyrie využívá systém Carnegie Robotics Multisense SL (laser, stereo, IR strukturované světlo) a také další kamery pro výstražné signály.
Sluchové systémy
Mikrofony se používají k rozpoznávání řeči a záznamu okolního hluku.
Hmatové senzory
To je klíčové pro manipulaci, rozpoznávání vlastností objektů (tvar, tuhost, měkkost) a bezpečnou interakci. Zahrnuje senzory síly, tlaku, točivého momentu, skluzu a teploty. Lidská ruka má přibližně 17 000 hmatových receptorů; replikace tohoto je obrovská výzva. Mezi pokroky patří flexibilní elektronické kůže (e-skiny) a pokročilé algoritmy umělé inteligence. Společnosti jako Sanctuary AI (robot Phoenix), Meta AI (Digit 360 s technologií GelSight) a Duke University (SonicSense využívající akustiku) v této oblasti dosahují pokroku. Hmatové senzory umožňují uchopení naslepo, detekci skluzu a vyhýbání se nadměrné síle, což je obzvláště důležité, protože mnoho současných robotických chapadel je stále jednoduchých systémů se dvěma prsty nebo přísavkami.
Propriocepce
Jedná se o pocit vlastní polohy a pohybu těla bez vizuálních nebo sluchových podnětů a je zásadní pro robustní řízení, zejména u měkkých robotů. I pro biologické systémy je to výzva; současným robotům tato bohatá zpětná vazba často chybí. Například framework KineSoft využívá pole senzorů napětí pro odhad tvaru v rukou měkkých robotů.
Fúze senzorů a odhad stavu
Kombinování dat z více senzorů (multisenzorová fúze) pomocí technik, jako jsou Bayesovské filtry a optimalizační metody (maximum a posteriori, MAP), je klíčové pro robustní odhad vnitřního stavu a pochopení vnějšího prostředí. Strojové učení je v tomto kontextu stále více upřednostňováno před systémy založenými na pravidlech.
Software, umělá inteligence a řídicí architektury
Inteligence a chování humanoidních robotů jsou určeny komplexním softwarem, pokročilými modely umělé inteligence a sofistikovanými řídicími architekturami. Vývoj jednotlivých komponent (akčních členů, senzorů, baterií) je stále více řízen požadavky umělé inteligence a řídicích systémů založených na učení. To vytváří zpětnovazební smyčku, ve které pokroky v umělé inteligenci vyžadují lepší hardware a vylepšený hardware umožňuje komplexnější umělou inteligenci. Modely umělé inteligence pro složité úkoly, jako je manipulace celého těla nebo agilní lokomoce, vyžadují vysoce citlivé akční členy, hustou senzorickou zpětnou vazbu (zejména hmatovou) a dostatečný výkon. Například přístupy založené na učení těží z hardwaru navrženého pro kompatibilitu se strojovým učením (např. jednoduchý sběr dat, robustní senzory). Tato společná evoluce je nezbytná pro překonání současných výkonnostních stagnací.
Lokomoce a dynamická rovnováha
Udržování dynamické rovnováhy se opírá o koncepty, jako je nulový momentový bod (ZMP). Model Predictive Control (MPC) a Whole-Body Control (WBC) jsou oblíbenými přístupy k integraci sofistikovaných modelů a generování poddajných pohybů. Výběr parametrů zůstává výzvou, protože ruční ladění je velmi pracné. Metody jako DiffTune využívají diferencovatelné programování pro automatické ladění. Učící se přístupy (např. posilovací učení) se používají pro bipedální lokomoci a zotavení z pádu.
Manipulace a obratnost
Ovládání celého těla koordinuje řadu stupňů volnosti pro složité úkoly. Replikace lidské jemné motoriky je významnou oblastí výzkumu. Manipulace celého těla, tj. využití jakékoli části těla pro interakci, představuje velkou výzvu. Například robot RoboPanoptes využívá vidění celého těla (21 kamer) pro celotělovou obratnost. Učení se z lidských demonstrací (imitační učení) je klíčovým přístupem.
Navigace a interakce s prostředím
Plánování trasy, vyhýbání se překážkám a detekce vlastních kolizí jsou klíčové pro pohyb ve složitých prostředích. SLAM (Simultánní lokalizace a mapování) v kombinaci s posilovacím učením (RL) se používá pro navigaci mobilních robotů ke zlepšení konvergence a snížení kolizí.
Interakce člověka s robotem (HRI) a kognitivní schopnosti
Jazykově-jazykové modely (LLM) a vizuální jazykové modely (VLM) zlepšují logické uvažování a kontextové chápání robotů, což umožňuje přirozenější interakce orientované na dialog. Roboti dostávají „osobnosti“ a zvídavé chování. Mezi výzvy patří nejednoznačnost jazyka, která může vést k chybám, a složitost mapování jazyka na fyzické akce. Slibným přístupem je jemné doladění LLM na datech robotů (Vision Language-Action Models – VLA).
Paradigmata učení a modely umělé inteligence
Probíhá posun od systémů založených na pravidlech k strojovému učení (ML) a hlubokému učení (DL). Pro motorické dovednosti se používá posilovací učení (RL), stejně jako imitační učení z lidských demonstrací. Přenos ze simulace do reálného prostředí je klíčový pro efektivní trénink; například platforma ToddlerBot byla navržena pro kompatibilitu s ML a sběr dat. Konečným cílem je umělá inteligence (AGI), která by robotům umožnila učit se, uvažovat a přizpůsobovat se široké škále úkolů stejně jako lidem bez specifického předprogramování. Povaha „černé skříňky“ některých pokročilých modelů umělé inteligence, zejména v hlubokém učení, představuje výzvu pro bezpečnostně kritické aplikace a ladění. To vyžaduje nové přístupy k vysvětlitelnosti a ověřování v humanoidních řídicích systémech. Zatímco umělá inteligence umožňuje nebývalé schopnosti, obtížné pochopení toho, jak modely hlubokého učení dospívají k rozhodnutím, je problémem, zejména u robotů, kteří úzce interagují s lidmi nebo pracují v nebezpečném prostředí. Tento nedostatek interpretovatelnosti může bránit bezpečnostní certifikaci a opravě chyb a vést výzkum směrem k transparentnější umělé inteligenci nebo robustnějším metodám validace.
🎯🎯🎯 Využijte rozsáhlé pětinásobné odborné znalosti společnosti Xpert.Digital v komplexním balíčku služeb | BD, výzkum a vývoj, XR, PR a optimalizace digitální viditelnosti

Využijte rozsáhlé pětinásobné odborné znalosti společnosti Xpert.Digital v komplexním balíčku služeb | Výzkum a vývoj, XR, PR a optimalizace digitální viditelnosti - Obrázek: Xpert.Digital
Xpert.Digital má hluboké znalosti z různých odvětví. To nám umožňuje vyvíjet strategie šité na míru, které jsou přesně přizpůsobeny požadavkům a výzvám vašeho konkrétního segmentu trhu. Neustálou analýzou tržních trendů a sledováním vývoje v oboru můžeme jednat s prozíravostí a nabízet inovativní řešení. Kombinací zkušeností a znalostí vytváříme přidanou hodnotu a poskytujeme našim zákazníkům rozhodující konkurenční výhodu.
Více o tom zde:
Komercializace a potenciál: Průlom humanoidních robotů na trhu
Aplikace humanoidních robotů (podle odvětví, se zaměřením na rok 2025)
Humanoidní roboti nacházejí stále větší uplatnění v široké škále odvětví. Jejich lidská podoba a rostoucí schopnosti je činí ideálními pro úkoly, které tradičně vykonávali lidé. Do roku 2025 se očekává významný pokrok v testování a počátečním nasazení, zejména v průmyslových odvětvích, zdravotnictví a specializovaných aplikacích. Lidská podoba je dvousečná zbraň: sice usnadňuje integraci do lidského prostředí a interakci člověk-robot (HRI), ale také vyvolává vysoká očekávání ohledně obratnosti a inteligence, která je v současnosti obtížné splnit. To by mohlo vést ke zklamání, pokud schopnosti nenaplní antropomorfní slib. Lidská ruka má neuvěřitelnou obratnost a lidská inteligence je vysoce přizpůsobivá. Současní roboti se i přes vylepšení stále potýkají s jemnou manipulací a robustním provozem v nestrukturovaném prostředí. Tato mezera mezi vzhledem a skutečným výkonem by mohla negativně ovlivnit přijetí a vnímané přínosy, pokud nebude pečlivě řízena.
Vhodné pro:

Průmyslová automatizace (výroba a logistika)
V průmyslové automatizaci slibují humanoidní roboti zefektivnění montážních linek, údržbářských a inspekčních prací a logistických procesů.
Výroba: Humanoidní roboti pomáhají lidským pracovníkům s přesnými úkoly, zvedáním těžkých břemen a opakujícími se činnostmi.
- Případová studie: BMW a Figure AI: Roboty Figure 02 jsou nasazeny v závodě BMW ve Spartanburgu v Jižní Karolíně pro úkoly, jako je montáž podvozků a přeprava dílů. Po počátečních pilotních projektech v roce 2024 proběhlo trvalé zavedení začátkem roku 2025. Funkční vylepšení do listopadu 2024 vedlo ke 400% zvýšení rychlosti pohybu, což robotům umožnilo umístit až 1 000 komponent denně. Figure AI plánuje v příštích čtyřech letech (2025–2028) vyrobit 100 000 až 200 000 kusů.
- Případová studie: Mercedes-Benz a Apptronik: Robot Apollo pomáhá pracovníkům ve výrobní hale.
- Tesla plánuje nasadit roboty Optimus pro úkoly, jako je nakládání plechů ve svých továrnách, přičemž se očekává, že do roku 2025 bude několik tisíc jednotek vykonávat smysluplné úkoly. BYD si klade za cíl nasadit do roku 2025 1 500 humanoidních robotů a do roku 2026 se jejich počet zvýší na 20 000.
Logistika a skladování: Humanoidní roboti optimalizují manipulaci s materiálem, správu zásob, jakož i procesy vychystávání, balení a třídění.
- Případová studie: Amazon a agilní robotika: Amazon testuje robota Digit pro manipulaci s kontejnery a jejich recyklaci ve svých výzkumných a vývojových centrech a skladech. Digit je navržen pro 8hodinové směny. Amazon také testuje robota Apollo od společnosti Apptronik.
- Humanoidi mohou snížit lidskou práci při příjmu a vykládání zboží, skladování, vychystávání objednávek, balení, označování, přepravě a nakládání, a také při inventurách.
- Společnost IDTechEx zaznamenala na začátku roku 2025 ve skladech pouze omezený počet pilotních projektů (<100 humanoidů). Rozsáhlé nasazení (tisíce jednotek) se neočekává před koncem roku 2025 kvůli 18–30měsíčním testovacím cyklům. Průlom v logistice se očekává v letech 2026–2027.
Dosud nejúspěšnější aplikace, jako například Moxi v nemocniční logistice a Digit v manipulaci s kontejnery ve skladech, se zaměřují na specifické, opakující se úkoly v relativně strukturovaných prostředích, spíše než na obecnou autonomii. To naznačuje cestu k širšímu přijetí: začít se specializovanými úkoly a poté je zobecňovat s tím, jak technologie dozrává. Moxi dodává, Digit přepravuje kontejnery. Jedná se o jasně definované úkoly. Tento přístup je v kontrastu s vizí univerzálních robotů. Úspěch humanoidů se specifickými úkoly přináší návratnost investic a generuje data pro zlepšení obecných schopností, čímž vytváří pozitivní cyklus. Tento postupný přístup je praktičtější než pokus o implementaci plných univerzálních schopností od samého začátku.
Zdravotní péče a péče o seniory
V tomto sektoru humanoidní roboti nabízejí podporu pro zdravotnický personál, péči o pacienty, sociální podporu a rehabilitační opatření.
Nemocniční logistika: Moxi od společnosti Diligent Robotics je nasazena ve více než 24 zdravotnických systémech a dokončila téměř milion dodávek (laboratorních vzorků, spotřebního materiálu), čímž zaměstnancům ušetřila značné množství času a ujetých vzdáleností. Návratnost investic je patrná ve zvýšené efektivitě a sníženém syndromu vyhoření zaměstnanců. Model Robotika jako služba (RaaS) bude pravděpodobně klíčovým faktorem pro přijetí v malých a středních podnicích (MSP) a pro nasazení humanoidů v odvětvích, kde jsou vysoké počáteční investice neúnosné, a tím demokratizuje přístup k pokročilé robotice. Hlavní překážkou jsou vysoké pořizovací náklady. Model RaaS snižuje vstupní bariéru přesunem nákladů z kapitálových výdajů (Capex) na provozní náklady (Opex). Úspěch společnosti Moxi s tímto modelem ve zdravotnictví demonstruje jeho ziskovost. S tím, jak se humanoidi stávají schopnějšími, by RaaS mohl menším společnostem nebo oddělením umožnit jejich využití bez masivních počátečních investic, což by potenciálně urychlilo pronikání na trh.
Péče o seniory, společnost a asistence: Roboti jako Grace (Hanson Robotics), Pepper (SoftBank), Nadine, PARO, ElliQ, Temi a Toyota HSR nabízejí sociální interakci, připomenutí léků, sledování zdravotního stavu a podporu při každodenních činnostech. Studie prokazují pozitivní zapojení a emocionální podporu.
Rehabilitace: Humanoidi jako Baxter a NAO se používají jako terapeutickí asistenti pro pacienty po mrtvici a děti, kde vedou cvičení a udržují pacienty v kontaktu.
Chirurgická asistence: Chirurgický systém Da Vinci poskytuje podporu během minimálně invazivních operací.
Průzkum vesmíru a nebezpečná prostředí
Vesmírný výzkum: podpora astronautů, provádění aktivit mimo vesmír (EVA), příprava stanovišť a provádění údržby ISS nebo budoucích základen na Měsíci/Marsu. Mezi příklady patří Robonaut 2 od NASA (první humanoid ve vesmíru), Valkyrie (určená pro mise na Mars) a roboti DLR Rollin' Justin, Agile Justin a TORO. Autonomní provoz je klíčový kvůli komunikačním zpožděním. Důležitý je modulární design pro opravitelnost (např. Valkyrie).
Nebezpečná prostředí (zmírňování následků katastrof, jaderný sektor): Navigace v nebezpečném terénu, pátrání a záchrana, dodávky humanitární pomoci, manipulace s toxickými materiály, podpora při hašení požárů. Příklady: Atlas od společnosti Boston Dynamics (určený pro tyto úkoly), Spot ve Fukušimě Daiichi pro průzkum, měření radiace a odběr vzorků trosek. Ve Fukušimě se roboti používají k monitorování, dekontaminaci a přípravě na odstraňování trosek paliva.
Osobní asistence a aplikace v domácnosti
Humanoidní roboti mají převzít domácí práce (úklid, vaření, praní prádla), zajistit bezpečnost a v budoucnu sloužit jako společníci. Tato oblast je stále ve velmi rané fázi. NEO Gamma od společnosti 1X Technologies byl testován v domácím prostředí pro úkoly, jako je příprava kávy a pomoc s vařením (dálkově ovládané). Mezi výzvy patří nestrukturované domácí prostředí, bezpečnost, náklady a požadovaná obecná inteligence.
Vzdělávání, zábava a zákaznický servis
Vzdělávání: Interaktivní asistenti učitele, personalizované učení, zejména pro předměty STEM a studenty se speciálními potřebami. Nao od SoftBank Robotics je široce používaný (>13 000 kusů ve více než 70 zemích) a používá se k výuce programování, kulturního dědictví, matematických konceptů a k podpoře dětí s autismem. Studie ukazují, že Nao zvyšuje zapojení, ale může mít problémy s použitelností v hlučném prostředí.
Zábava: Interaktivní moderátoři, umělci v zábavních parcích, na akcích a v médiích. Ameca od Engineered Arts je známá svými realistickými výrazy obličeje. RoboThespian se používá pro divadelní představení. Očekává se, že trh s humanoidy pro zábavu výrazně poroste.
Zákaznický servis a pohostinství: Recepční, informační asistenti, concierge v maloobchodě, hotelech a bankách. Pepper od SoftBank byl testován jako recepční robot v nemocnicích a maloobchodních prodejnách.
Nově vznikající a specializované aplikace
Mezi další oblasti použití patří armáda a obrana (průzkum, likvidace munice, simulace výcviku), ale i zemědělství a stavebnictví.
Klíčové oblasti použití a vhodnost humanoidních robotů (stav k roku 2025)
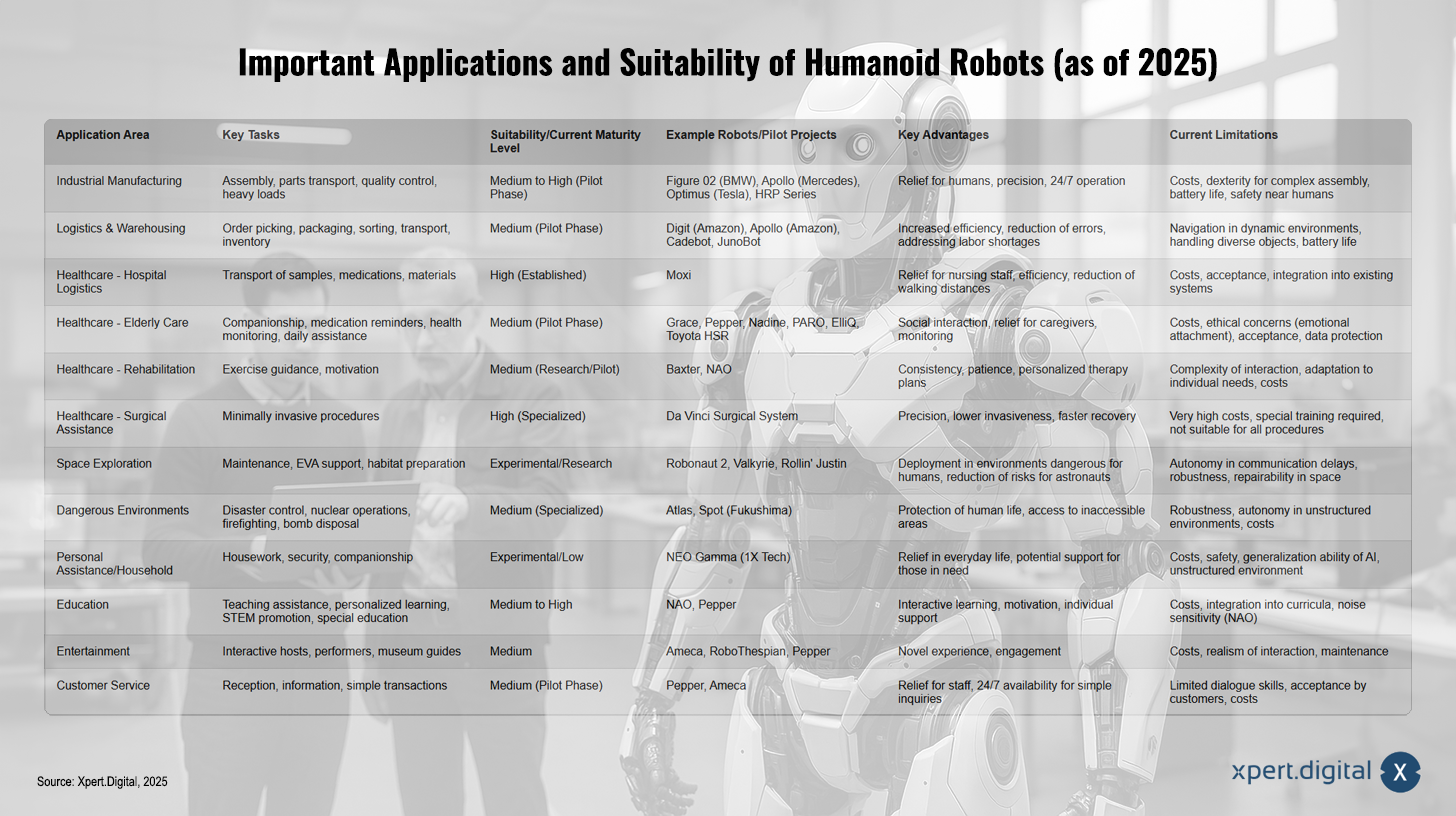
Klíčové oblasti použití a vhodnost humanoidních robotů (stav k roku 2025) – Xpert.Digital
Klíčové oblasti použití a vhodnost humanoidních robotů v roce 2025 zahrnují řadu oborů. V průmyslové výrobě roboti přebírají úkoly, jako je montáž, přeprava dílů, kontrola kvality a přesun těžkých břemen. S projekty jako Figure 02 (BMW), Apollo (Mercedes), Optimus (Tesla) a řada HRP dosáhli střední až vysoké úrovně vyspělosti, ale stále jsou omezeni náklady, výdrží baterie a bezpečností v těsné blízkosti lidí. V logistice a skladování se humanoidní roboti používají pro vychystávání objednávek, třídění a přepravu. Příklady jako Amazon Digit a Apollo nebo Cadebot a JunoBot demonstrují slibné pilotní projekty, ačkoli výzvy, jako je dynamické prostředí a manipulace s různými předměty, přetrvávají. Ve zdravotnictví se roboti nacházejí především v nemocniční logistice, kde jsou zavedeny modely jako Moxi, které ulevují ošetřovatelskému personálu přepravou vzorků a léků. V péči o seniory humanoidi jako Grace a Pepper pomáhají s každodenními činnostmi, ale etické obavy a problémy s ochranou osobních údajů zůstávají překážkou. Pro rehabilitaci, jako jsou motivační cvičení, poskytují podporu roboti jako Baxter a NAO; Pro zpřesnění této interakce je však zapotřebí dalšího výzkumu. Průkopníkem v oblasti chirurgické asistence je chirurgický systém da Vinci, který umožňuje minimálně invazivní zákroky s vysokou přesností, ale je vhodný pouze pro specifické aplikace a je velmi drahý.
Ve výzkumu vesmíru se roboti jako Robonaut 2, Valkyrie a Rollin' Justin používají k provádění údržby a přípravy prostředí v nebezpečných prostředích, čímž se minimalizují rizika pro astronauty. Přetrvávají však výzvy týkající se autonomie, robustnosti a opravitelnosti. V nebezpečných prostředích, jako je pomoc při katastrofách nebo jaderné scénáře, poskytují roboti jako Atlas a Spot základní služby. Osobní asistence a správa domácnosti zůstávají experimentální s prototypy jako NEO Gamma, kde náklady, bezpečnost a flexibilita v nestrukturovaném prostředí stále představují překážky. Ve vzdělávání roboti jako NAO a Pepper podporují interaktivní učení a personalizovanou podporu, zatímco náklady a integrace s učebními osnovami zůstávají výzvou. Systémy jako Ameca a RoboThespian jsou přítomny také v zábavním průmyslu a nabízejí nové zážitky jako průvodci muzeí nebo umělci. V zákaznickém servisu poskytují podporu na recepci a s informacemi a nabízejí výhodu dostupnosti 24 hodin denně, 7 dní v týdnu; problémem jsou však omezené možnosti dialogu a přijetí. Celkově vzato humanoidní roboti vykazují obrovský potenciál, ale v současné době stále čelí technologickým, finančním a sociálním překážkám, aby svůj potenciál plně realizovali.
Tržní krajina a komercializace (stav k roku 2025)
Trh s humanoidními roboty se v roce 2025 nachází v dynamické fázi přechodu od výzkumu a vývoje k začátku komerčního využití. Rostoucí počet společností, od zavedených technologických korporací až po agilní startupy, je hnací silou inovací a soupeří o podíl na trhu v tomto slibném sektoru.
Přední společnosti a platformy pro humanoidní roboty
Mezi nejvýznamnější hráče, kteří ovlivňují vývoj a komercializaci humanoidních robotů, patří (přibližně k roku 2025):
- Tesla: S Optimus Gen 2 se Tesla zaměřuje na využití ve vlastní výrobě a potenciálně i pro obecné asistenční úkoly.
- Boston Dynamics: Elektrický atlas je známý svou výjimečnou mobilitou a je dále vyvíjen pro výzkum, průmyslové inspekce a pomoc při katastrofách.
- Figure AI: S modely Figure 01, Figure 02 a oznámeným Figure 03 se společnost zaměřuje na univerzální roboty pro průmysl a logistiku, včetně pilotních projektů v BMW.
- Agility Robotics: Robot Digit je speciálně navržen pro logistické aplikace a testují ho společnosti jako Amazon.
- Apptronik: Apollo se vyvíjí pro průmyslové aplikace a logistiku ve spolupráci s dalšími společnostmi, včetně Mercedes-Benz a Amazon.
- Unitree Robotics: Nabízí agilnější a nákladově efektivnější možnosti pro výzkum, vzdělávání a lehký průmysl s modely, jako jsou G1 a H1.
- Sanctuary AI: Robot Phoenix se zaměřuje na kognitivní schopnosti a chování podobné lidskému pro složité úkoly v různých odvětvích.
- 1X Technologies: NEO je určen pro použití v domácnosti a pro asistenční úkoly.
- PAL Robotics: Zavedený evropský výrobce s řadou robotů (REEM, TIAGo, TALOS, ARI) pro výzkum, zdravotnictví a servisní aplikace.
- Honda: Přestože se výroba ASIMO ukončila, odkaz společnosti a základní výzkum zůstávají pro toto odvětví významné.
- Technické umění: Ameca je známá svými extrémně realistickými výrazy obličeje a interaktivními možnostmi, především pro sociální interakci a zákaznický servis.
- UBTech Robotics: S modely jako Walker X pro různé aplikace.
- NEURA Robotics: 4NE-1 je navržen pro spolupráci člověka a robota v domácím i průmyslovém prostředí.
- DEEP Robotics: Dr01 je robustní humanoid pro přesné průmyslové úkoly.
- Fourierova inteligence: GR-1 se používá v různých kontextech.
Významné platformy humanoidních robotů (cca 2025)
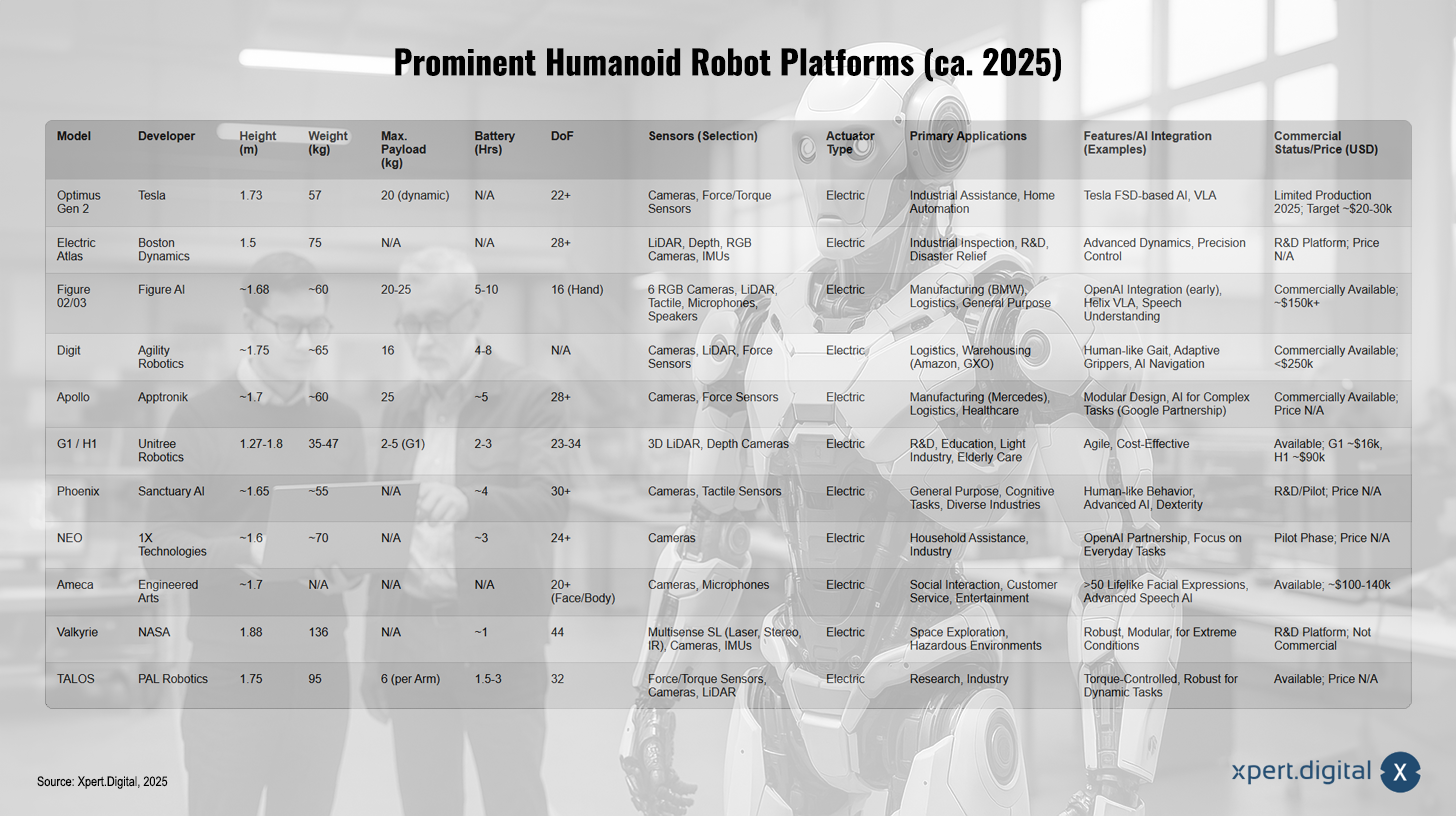
Významné platformy humanoidních robotů (přibližně 2025) – Obrázek: Xpert.Digital
Poznámka: Údaje jsou odhady nebo vycházejí z dostupných informací (k 1./2. čtvrtletí 2025). „n/a“ = není k dispozici. DoF = Stupně volnosti.
Mezi významné humanoidní robotické platformy v roce 2025 patří řada působivých modelů vhodných pro průmyslové, domácí a vědecké aplikace. Tesla Optimus Gen 2, vysoký 1,73 m s dynamickou nosností až 20 kg, je vybaven umělou inteligencí založenou na Tesla FSD. S omezenou výrobou v roce 2025 se očekává cena 20 000 až 30 000 dolarů. Boston Dynamics vede se svým Electric Atlas, modelem charakterizovaným pokročilou dynamikou a přesným řízením, určeným pro průmyslové inspekce a pomoc při katastrofách. Figure AI nabízí Figure 02/03, model pro výrobu, logistiku a univerzální aplikace, využívající integrace OpenAI a pokročilé porozumění přirozenému jazyku, jehož cena přesahuje 150 000 dolarů.
Robotický robot Digit od společnosti Agility Robotics, jehož cena je nižší než 250 000 dolarů, se pyšní chůzí podobnou lidské a adaptivními chapadly, díky čemuž je ideální pro logistiku a skladování. Robotický robot Apollo od společnosti Apptronik, modulární konstrukce a navržený pro složité úkoly s využitím umělé inteligence, se již používá ve výrobě a zdravotnictví. Cenově dostupnější alternativy, jako například Unitree Robotics G1 s cenou kolem 16 000 dolarů, nabízejí agilitu a efektivitu pro lehké průmyslové a vzdělávací aplikace. Robotický robot Phoenix od společnosti Sanctuary AI vyniká svým chováním podobným lidskému a pokročilou umělou inteligencí, zatímco robot NEO od společnosti 1X Technologies vyniká v oblasti domácí pomoci a každodenních úkolů. Oba jsou stále v pilotní fázi.
Pro sociální interakci a zábavu je k dispozici robot Ameca od společnosti Engineered Arts s více než 50 realistickými výrazy obličeje, který je k dispozici za cenu od 100 000 dolarů. NASA nabízí robota Valkyrie určeného pro extrémní podmínky a průzkum vesmíru, zatímco TALOS od společnosti PAL Robotics s robustní konstrukcí s řízeným krouticím momentem je ideální pro výzkum a průmysl. Tyto robotické platformy demonstrují pozoruhodný pokrok v technologii, integraci umělé inteligence a flexibilitě, přičemž každá platforma je přizpůsobena specifickým požadavkům, a pokrývá tak širokou škálu aplikací.
Trendy v investicích a financování
Sektor humanoidní robotiky přitahuje významné investice rizikového kapitálu, přičemž financování se stále více soustředí do menšího počtu větších kol. Mezi příklady patří Figure AI, která v únoru 2024 získala 675 milionů dolarů od investorů, jako jsou Nvidia, Jeff Bezos, OpenAI a Microsoft; Physical Intelligence, která získala 400 milionů dolarů; a Apptronik, která získala 350 milionů dolarů (s podporou společnosti Google). OpenAI také investovala 23,5 milionu dolarů do společnosti 1X Technologies. Globální investice do humanoidních startupů se zvýšily z přibližně 308 milionů dolarů v roce 2020 na 1,1 miliardy dolarů v roce 2024. Investoři jsou obzvláště přitahováni flexibilními, všestrannými roboty s pokročilým „mozkem“ umělé inteligence a aplikacemi v oblastech s vysokým růstem, jako je lékařská robotika. Souběžně s tím národní iniciativy, zejména v Číně („Made in China 2025“, „14. pětiletý plán“), masivně podporují robotický průmysl prostřednictvím vládní podpory a rozvoje silných domácích dodavatelských řetězců.
Velikost trhu, prognózy růstu a segmentace
Prognózy růstu trhu s humanoidními roboty jsou trvale optimistické, ačkoli přesná čísla se liší v závislosti na analýze. Obecně se očekává, že rok 2024 bude znamenat vývoj pokročilých prototypů, rok 2025 zahájení masové výroby a rok 2026 širší komerční přijetí. Tato široká škála tržních prognóz odráží nejen rozdílné metodiky, ale také základní nejistoty ohledně rychlosti, s jakou lze překonat technologické překážky (viz oddíl 6) a dosáhnout širokého společenského přijetí (viz oddíl 7). Optimističtější prognózy často předpokládají rychlý průlom v oblasti umělé inteligence a snižování nákladů. Konečná velikost trhu bude silně záviset na tom, jak se tyto faktory vyvinou.
Shrnutí prognóz růstu trhu s humanoidní robotikou
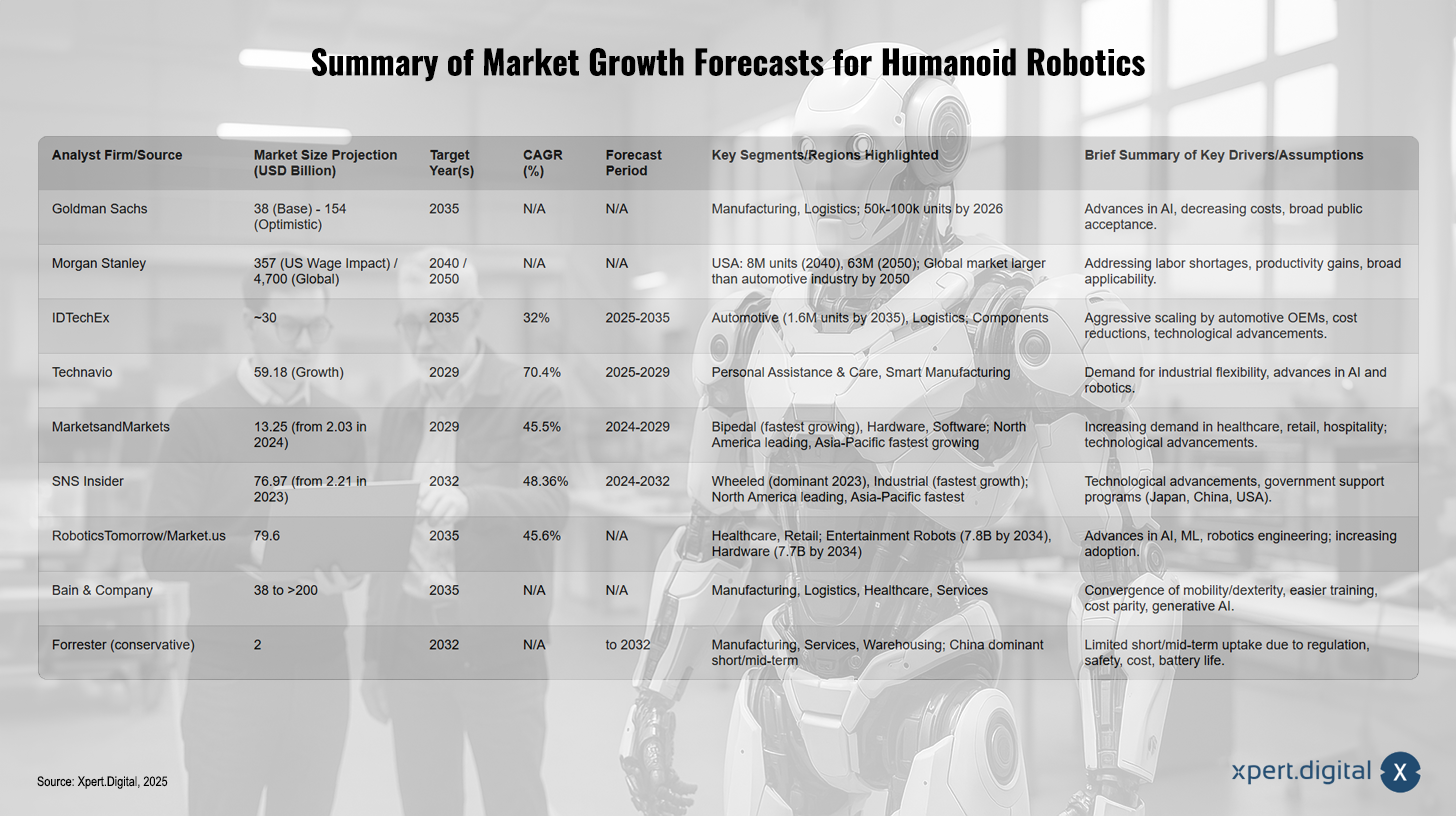
Shrnutí prognóz růstu trhu s humanoidní robotikou – Xpert.Digital
Segmentace trhu:
- Podle komponent: Hardware (senzory, akční členy, zdroje energie, řídicí systémy) a software (založený na umělé inteligenci).
- Na základě mobility: bipedální (dominantní, přizpůsobitelné pro logistiku, zdravotnictví, vzdělávání) a kolové (stabilita, nižší náklady, pro rovné povrchy). Trh s bipedálními roboty roste nejrychleji (CAGR 54,47 % 2023–2028).
- Podle použití: Průmysl (automobilový průmysl, přední logistika), osobní asistence a péče (významný růst), výzkum, vzdělávání, zábava, pátrací a záchranné služby, vztahy s veřejností, armáda.
- Podle regionů: Severní Amerika v současnosti vede, ale očekává se, že Asie a Tichomoří (zejména Čína) zaznamená nejrychlejší růst a potenciální dominanci díky silným dodavatelským řetězcům a vládní podpoře. V Evropě se očekává pomalejší zavádění kvůli pracovnímu zákoníku a odborům. Geopolitický rozměr (vedoucí postavení USA v oblasti umělé inteligence vs. dominance Číny v dodavatelském řetězci) by mohl vést k regionálním rozdílům v technologických standardech, prioritách aplikací a rozvoji trhu, což by mohlo vést k vytvoření odlišných humanoidních ekosystémů. USA vynikají v oblasti umělé inteligence a vysoce výkonné robotiky. Čína má silnou výrobní základnu a rychle vyvíjí své vlastní humanoidy, často s cílem dosáhnout různých primárních trhů. To by mohlo vést k odlišným vývojovým cestám, kdy se americké firmy zaměří na pokročilé schopnosti založené na umělé inteligenci a čínské firmy využijí úspory z rozsahu ve výrobě a cenové výhody. Obchodní politika a obavy o národní bezpečnost by tyto rozdíly mohly dále prohloubit.
Prognózy růstu trhu s humanoidní robotikou ukazují dynamický vývoj, přičemž různí analytici se na toto téma odchylují. Goldman Sachs odhaduje, že trh do roku 2035 dosáhne hodnoty 38 až 154 miliard dolarů, přičemž jako klíčové faktory uvádí pokrok v umělé inteligenci (AI), snižování nákladů a široké přijetí ze strany veřejnosti. Morgan Stanley předpovídá, že globální trh do roku 2050 překoná automobilový průmysl s až 63 miliony kusů po celém světě a významným dopadem na mzdy v USA. IDTechEx očekává roční růst o 32 % pro období 2025–2035, poháněný technologickým pokrokem a snižováním nákladů v automobilovém a logistickém sektoru. Technavio předpovídá objem trhu do roku 2029 ve výši 59,18 miliard dolarů a za klíčové segmenty růstu díky pokroku v oblasti AI a robotiky považuje osobní asistenci, péči a inteligentní výrobu. MarketsandMarkets předpovídá roční růst o 45,5 % do roku 2029, v čele se Severní Amerikou a Asií a Tichomořím, s rostoucí poptávkou ve zdravotnictví, maloobchodě a pohostinství. Server SNS Insider zdůrazňuje důležitost vládních pobídek a předpovídá růst na 76,97 miliard dolarů do roku 2032, přičemž Severní Amerika bude na prvním místě a Asie a Tichomoří zaznamenají nejrychlejší růst. RoboticsTomorrow/Market.us očekává do roku 2035 objem tržeb ve výši 79,6 miliard dolarů, který bude urychlen pokrokem v oblasti umělé inteligence, strojového učení a robotického inženýrství, se zvláštními vyhlídkami v oblasti zábavy a hardwaru. Společnost Bain & Company předpovídá trh v hodnotě 38 až více než 200 miliard dolarů do roku 2035 a vidí potenciál v oblastech, jako je výroba, zdravotnictví a generativní umělá inteligence. Společnost Forrester naopak zůstává konzervativnější a do roku 2032 očekává pouze 2 miliardy dolarů, a to kvůli výzvám, jako je regulace, bezpečnost a účinnost baterií. Celkově je růst poháněn pokrokem v technologiích, umělé inteligenci a rostoucí poptávkou po automatizaci, produktivitě a efektivitě.
Obchodní modely (např. RaaS)
Model „Robotika jako služba“ (RaaS) získává na popularitě. Umožňuje společnostem pronajímat si roboty namísto velkých počátečních investic, čímž zpřístupňuje humanoidní roboty malým a středním podnikům (MSP). Modely přímého prodeje a pronájmu transformují průmyslovou krajinu. Vznik RaaS není jen modelem financování, ale strategickým faktorem, který by mohl výrazně urychlit jejich přijetí v malých a středních podnicích a rozvíjejících se sektorech snížením vstupních bariér a rozšířením tržní základny i mimo velké korporace. Hlavní překážkou jsou vysoké pořizovací náklady. RaaS transformuje investiční náklady na provozní náklady, čímž zpřístupňuje pokročilou robotiku. To je zvláště důležité pro malé a střední podniky, které si nemohou dovolit velké investice. Pokud by bylo možné humanoidy efektivně nasadit prostřednictvím RaaS, mohlo by to vést k mnohem rychlejšímu pronikání na trh, než kdyby byl prodej založen čistě na kapitálových statcích, a potenciálně by to překonalo některé konzervativní prognózy přijetí.
Konkurenční dynamika a postavení na trhu
Konkurence probíhá mezi vertikálně integrovanými vývojáři (např. Tesla, která si vyvíjí hardware a umělou inteligenci interně) a společnostmi, které se spoléhají na partnerství (např. Figure AI zpočátku s OpenAI, Apptronik s Googlem). USA vedou v oblasti školení v oblasti umělé inteligence a špičkových aplikací, zatímco Čína dominuje v dodavatelských řetězcích, zpočátku se více zaměřuje na zábavu a vzdělávání, ale rychle dohání v průmyslovém sektoru. Podle studie Hype Cycle společnosti Gartner vstoupili humanoidní roboti do fáze „Inovační spouštěč“ v roce 2024, ačkoli k jejich širokému přijetí může ještě dojít až za více než 10 let. Forrester zařadil humanoidy v roce 2025 mezi 10 nejvýznamnějších nově vznikajících technologií a předpovídá jejich rušivý dopad do roku 2030.
Naše doporučení: 🌍 Neomezený dosah 🔗 Síťové 🌐 Vícejazyčné 💪 Silné prodeje: 💡 Autentické se strategií 🚀 Inovace se setkává 🧠 Intuice

Od lokálního po globální: Malé a střední podniky dobývají globální trh chytrými strategiemi - Obrázek: Xpert.Digital
V době, kdy digitální přítomnost společnosti určuje její úspěch, je výzvou, jak tuto přítomnost učinit autentickou, individuální a dalekosáhlou. Xpert.Digital nabízí inovativní řešení, které se staví jako průsečík mezi průmyslovým centrem, blogem a ambasadorem značky. Spojuje výhody komunikačních a prodejních kanálů v jediné platformě a umožňuje publikaci v 18 různých jazycích. Spolupráce s partnerskými portály a možnost publikování článků na Google News a tiskový distribuční seznam s cca 8 000 novináři a čtenáři maximalizují dosah a viditelnost obsahu. To představuje základní faktor v externím prodeji a marketingu (SMarketing).
Více o tom zde:
Další kapitola robotiky: Transformace člověka na stroj
Klíčové výzvy humanoidní robotiky a její budoucnost
Navzdory rychlému pokroku a obrovskému potenciálu čelí humanoidní robotice řadě významných technických, komerčních a společenských výzev, které je třeba překonat, aby bylo možné její široké a úspěšné zavedení.
Technické výzvy
Hardwarová omezení:
- Výdrž baterie a hustota výkonu: Krátké provozní doby (často pouze 2–5 hodin) a dlouhé doby nabíjení výrazně omezují nepřetržitý provoz. Vysoký výkon potřebný pro dynamické akce je náročný.
- Obratnost a manipulace: Napodobení obratnosti lidské ruky pro úkoly jemné motoriky a manipulaci s různými předměty je velkou výzvou. Současné chapadla jsou často stále příliš jednoduchá. Pro to jsou nezbytné pokročilé hmatové senzory.
- Výkon aktuátoru: Vyvážení výkonu, rychlosti, přesnosti, účinnosti a nákladů u aktuátorů zůstává obtížné.
- Robustnost a integrace senzorů: Zajištění spolehlivého výkonu senzorů v reálných podmínkách a efektivní slučování dat z různých typů senzorů představuje výzvu.
- Celková robustnost a spolehlivost: Musí být zajištěno, aby roboti fungovali konzistentně a bez častých poruch v náročném, nestrukturovaném prostředí.
Složitost softwaru a umělé inteligence:
- Obecná inteligence a logické uvažování: Dosažení lidské adaptability, dovedností v řešení problémů a zdravého rozumu v rozmanitých a nepředvídatelných situacích je klíčovou výzvou. Současné systémy umělé inteligence mohou stále dělat „hloupé chyby“. Výzva „obecné inteligence“ není jen technickým problémem umělé inteligence, ale úzce souvisí s mechanickou obratností a smyslovou ostrostí. Vysoce inteligentní robot se slabými fyzickými schopnostmi bude mít omezené využití a naopak. To vyžaduje přístup společného návrhu. Aby byl robot skutečně univerzálně použitelný, musí být jeho umělá inteligence schopna rozumět a uvažovat v široké škále úkolů a prostředí. Provádění těchto úkolů však vyžaduje sofistikovanou fyzickou interakci – uchopení různých objektů, navigaci ve složitém terénu. Pokud umělá inteligence dokáže vyvinout plán, ale hardware (ruce, nohy, senzory) jej nedokáže spolehlivě provést nebo přesně vnímat prostředí, je inteligence k ničemu. To podtrhuje potřebu úzkého propojení vývoje umělé inteligence a hardwaru, spíše než jejich odděleného sledování.
- Interakce člověk-robot (HRI): Vytvoření přirozené, intuitivní a bezpečné HRI, zejména s neexpertními uživateli, je složité. LLM programy vykazují potenciál, ale také s sebou přinášejí nové složitosti.
- Efektivita učení a přenos ze simulace do reálného prostředí: Vývoj algoritmů, které dokáží efektivně učit složité dovednosti s omezenými reálnými daty a spolehlivě přenášet naučené chování ze simulace do fyzických robotů, je klíčový.
- Bezpečnost a předvídatelnost: Zajištění bezpečného provozu autonomních systémů, zejména v těsné blízkosti lidí, a předvídatelnost a ověřitelnost jejich chování jsou zásadní. V tomto ohledu je důvodem k obavám povaha „černé skříňky“ některých modelů umělé inteligence.
Výzvy v komercializaci a škálovatelnosti
- Náklady: Vysoké jednotkové náklady (mezi 20 000 a více než 150 000 USD, v závislosti na modelu a funkcích) a celkové provozní náklady (včetně školení, údržby a softwaru) představují překážku. U některých nízkokvalifikovaných pracovních míst se blíží parita nákladů s lidskou prací, ale dosud nebyla všeobecně dosažena. Vysoká cena humanoidů je překážkou, ale celkové náklady na vlastnictví a hodnotová nabídka (včetně faktorů, jako je nepřetržitý provoz, bezpečnost při nebezpečných úkolech a řešení nedostatku pracovních sil) nakonec určí návratnost investic. Zaměření se pouze na jednotkovou cenu je nedostatečné. Ačkoli se robot za 100 000 USD může zdát drahý, jeho ekonomická hodnota by mohla být značná, pokud dokáže nahradit více lidských směn, pracovat nepřetržitě, snížit počet chyb a vykonávat úkoly, které lidé nemohou nebo nechtějí dělat. Výpočet návratnosti investic musí být holistický a zohledňovat zvýšení produktivity, snížené náklady na pracovní sílu, zlepšenou bezpečnost a zvýšenou provozní flexibilitu. Tato komplexní perspektiva je klíčová pro společnosti, které zvažují jeho přijetí.
- Návratnost investic (ROI): Prokázání jasné a přesvědčivé návratnosti investic pro firmy, zejména ve srovnání se stávající specializovanou automatizací nebo lidskou prací, je náročné. Dlouhé testovací cykly v odvětvích, jako je logistika (18–30 měsíců), zpožďují rozhodování.
- Výroba a dodavatelský řetězec: Zvyšování hromadné výroby komplexních humanoidních robotů naráží na úzká hrdla, jako je omezená dostupnost vysoce přesných šroubů. Existuje závislost na specializovaných komponentách a globálních dodavatelských řetězcích. Úzká hrdla ve výrobě specializovaných komponentů (např. vysoce přesných šroubů, aktuátorů) naznačují, že samotný dodavatelský řetězec humanoidů by se mohl stát klíčovou oblastí pro investice a inovace. To by mohlo potenciálně vést ke vzniku nových specializovaných výrobců komponentů nebo k vertikální integraci ze strany předních výrobců OEM robotů. Hromadná výroba humanoidů vyžaduje spolehlivé dodávky mnoha specializovaných dílů. Pokud stávající dodavatelské řetězce pro tyto díly (např. přesné šrouby) nemohou uspokojit rostoucí poptávku, omezí to celkovou produkci humanoidů. To vytváří příležitost pro nové společnosti vstoupit na trh jako dodavatelé komponentů nebo pro velké hráče, jako je Tesla, vertikálně integrovat výrobu více komponentů, aby si zajistili dodávky a kontrolovali náklady.
- Integrace do stávajících pracovních postupů: Přizpůsobení robotů stávajícím prostředím a pracovním postupům zaměřeným na člověka bez větších nákladných úprav je nezbytné.
- Veřejné přijetí a důvěra: Je třeba překonat společenské obavy týkající se ztráty pracovních míst, bezpečnosti, ochrany údajů a obecné přítomnosti strojů podobných lidem.
- Regulační a standardizační překážky: Chybí jasné, globálně harmonizované předpisy a bezpečnostní normy pro pokročilé autonomní humanoidy.
Klíčové technické a komerční výzvy v humanoidní robotice
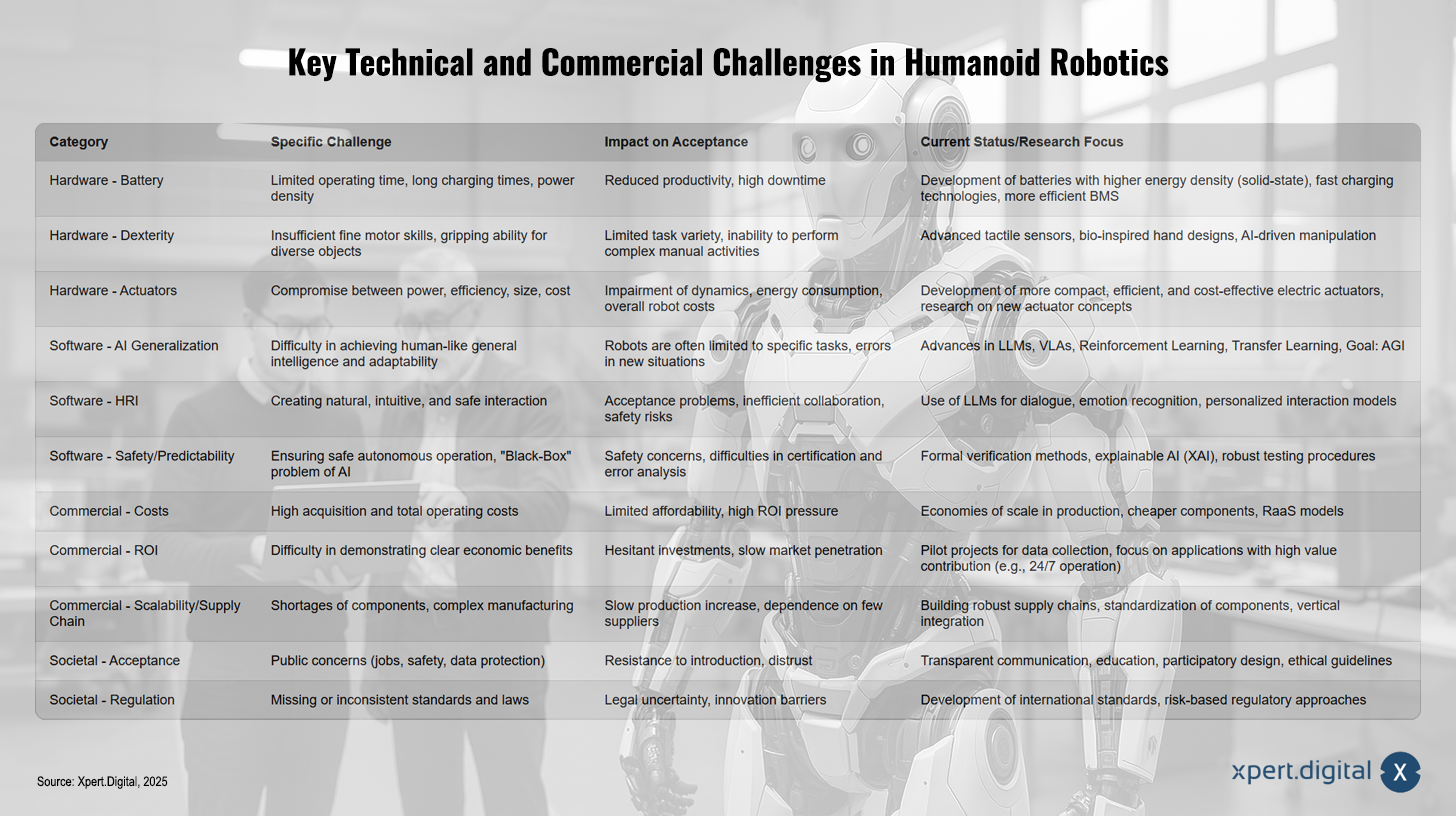
Klíčové technické a komerční výzvy v humanoidní robotice – Obrázek: Xpert.Digital
Klíčové technické a komerční výzvy v humanoidní robotice zahrnují různé kategorie, z nichž každá představuje specifické problémy a ovlivňuje přijetí technologie. Mezi výzvy související s hardwarem patří omezená výdrž baterie a dlouhé doby nabíjení, které snižují produktivitu a vedou k významným prostojům. Řešení zahrnují vývoj baterií s vyšší energetickou hustotou a technologií rychlého nabíjení. Dalším problémem jsou nedostatečné jemné motorické dovednosti a schopnost uchopení, což omezuje rozsah úkolů, které lze provádět. Pokroky v hmatových senzorech a biologicky inspirovaném designu rukou zde nabízejí potenciální řešení. Pohony také čelí výzvě vyvážení výkonu, účinnosti, velikosti a nákladů, což ovlivňuje dynamiku a spotřebu energie. V současné době se vyvíjejí nové koncepty a kompaktnější pohony.
Na straně softwaru spočívá klíčová překážka v zobecnění umělé inteligence (AI), protože inteligence a adaptability podobné lidské je obtížné dosáhnout. Nedostatek flexibility omezuje roboty na specifické úkoly. Pokroky v oblastech, jako je posilovací učení a transferové učení, se snaží tyto problémy řešit. Aby se umožnily přirozené, intuitivní a bezpečné interakce mezi člověkem a robotem (HRI), propaguje se používání modelů AI, které řídí dialogy a rozpoznávají emoce. Zároveň jsou naléhavými obavami bezpečnost a předvídatelnost v autonomních systémech, protože tzv. problém „černé skříňky“ AI vytváří jak bezpečnostní obavy, tak i výzvy v oblasti certifikace. V tomto ohledu jsou nezbytné vysvětlitelná AI a robustní testovací metody.
V komerčním sektoru představují vysoké pořizovací náklady a obtížnost prokázání jasné návratnosti investic (ROI) významné překážky. Tyto problémy brání investicím a pronikání na trh. Řešení by mohla zahrnovat dostupnější komponenty, pilotní projekty pro hodnotovou analýzu a modely robotiky jako služby (RaaS). Problémy se škálovatelností a dodavatelským řetězcem způsobené úzkými místy v oblasti komponent a složitými výrobními procesy komplikují rychlý nárůst výroby. V této souvislosti jsou klíčovými cíli robustní dodavatelské řetězce a standardizace komponent.
Společenské obavy týkající se ztráty pracovních míst, bezpečnosti a ochrany osobních údajů ovlivňují přijetí ze strany veřejnosti. Transparentní komunikace, vzdělávání a etické pokyny mohou pomoci snížit předsudky. Podobně i absence nebo nekonzistentní regulace představuje problém, který vede k právní nejistotě a brání inovacím. Mezinárodní standardy a regulační přístupy založené na riziku jsou proto nezbytné pro vytvoření právních rámců, které drží krok s technologickým vývojem.
Etické, společenské a správní důsledky
Neustálý vývoj a rostoucí rozšíření humanoidních robotů vyvolává hluboké etické, společenské a regulační otázky. Ty sahají od dopadu na trh práce a bezpečnost až po ochranu osobních údajů, odpovědnost a základní vztah mezi lidmi a stroji. Etická debata se stále více přesouvá od toho, zda je dokážeme postavit, k tomu, jak bychom je měli zodpovědně integrovat. To implikuje rostoucí uznání jejich bezprostředního příchodu a potřebu proaktivní, nikoli reaktivní správy. Předchozí etické diskuse byly často spekulativní. S pilotními projekty a rychlým pokrokem v oblasti umělé inteligence se tyto otázky nyní stávají praktičtějšími a naléhavějšími. Zdroje jako [zdroj 1] a [zdroj 2] diskutují o konkrétních otázkách, jako je odpovědnost, zaujatost a ochrana osobních údajů v kontextu nasaditelných systémů. Tento posun naznačuje zrání oboru a společenskou angažovanost s krátkodobými důsledky.
Základní etické obavy
- Ztráta pracovních míst a ekonomický dopad: Automatizace úkolů, které dříve vykonávali lidé, může vést k nezaměstnanosti nebo stagnaci mezd, zejména v odvětvích s nízkou kvalifikací. To vyžaduje rekvalifikační programy a sítě sociálního zabezpečení.
- Bezpečnost a ochrana: Fyzická bezpečnost lidí interagujících s výkonnými autonomními roboty je prvořadá. To je umocněno kybernetickými riziky a zranitelností vůči útokům.
- Soukromí a dohled: Sběr dat roboty vybavenými pokročilými senzory (kamerami, mikrofony) v domácnostech, na pracovištích a ve veřejných prostorách vyvolává značné obavy o ochranu osobních údajů. Zvláštní obavy představuje biometrické sledování, rozpoznávání obličeje a analýza pohybu.
- Autonomie, odpovědnost a vyúčtování: Určení odpovědnosti, když autonomní roboti způsobí škodu nebo udělají chyby, je složité. Povaha rozhodování umělé inteligence jako „černé skříňky“ situaci dále komplikuje.
- Zkreslení: Systémy umělé inteligence mohou přijímat a šířit zkreslení z tréninkových dat, což může vést k nespravedlivému nebo diskriminačnímu zacházení v oblastech, jako je zdravotnictví nebo zaměstnání.
- Etika interakce člověka s robotem (HRI):
- Klam a antropomorfismus: Roboti, kteří vypadají humanoidně nebo projevují emoce, mohou uživatele uvést v omyl nebo vytvářet nezdravé vazby.
- Emoční závislost: Existuje riziko nadměrné závislosti na robotech jako společnících nebo pro emocionální podporu, zejména u zranitelných skupin (senioři, děti).
- Nahrazení lidské interakce: Existují obavy, že roboti by mohli omezit skutečný lidský kontakt.
Vývoj etických norem pro humanoidy bude pravděpodobně odrážet (a bude jimi ovlivněn) probíhající debaty v obecné etice umělé inteligence, ale s přidanou složitostí fyzického ztělesnění. Tato fyzická přítomnost vyvolává přímé obavy o bezpečnost a lidskou odpovědnost, které se u čistě softwarové umělé inteligence nevyskytují. Mnoho etických principů umělé inteligence (zaujatost, transparentnost, odpovědnost) se vztahuje přímo na humanoidy. Fyzická přítomnost humanoida a jeho schopnost interagovat ve světě však s sebou nese jedinečná rizika (fyzické poškození) a dynamiku interakce (emoční pouto). Etika humanoidních robotů proto vyžaduje specializované zaměření, které staví na obecné etice umělé inteligence, ale také ji rozšiřuje.
Přehled etických a společenských obav v oblasti humanoidní robotiky
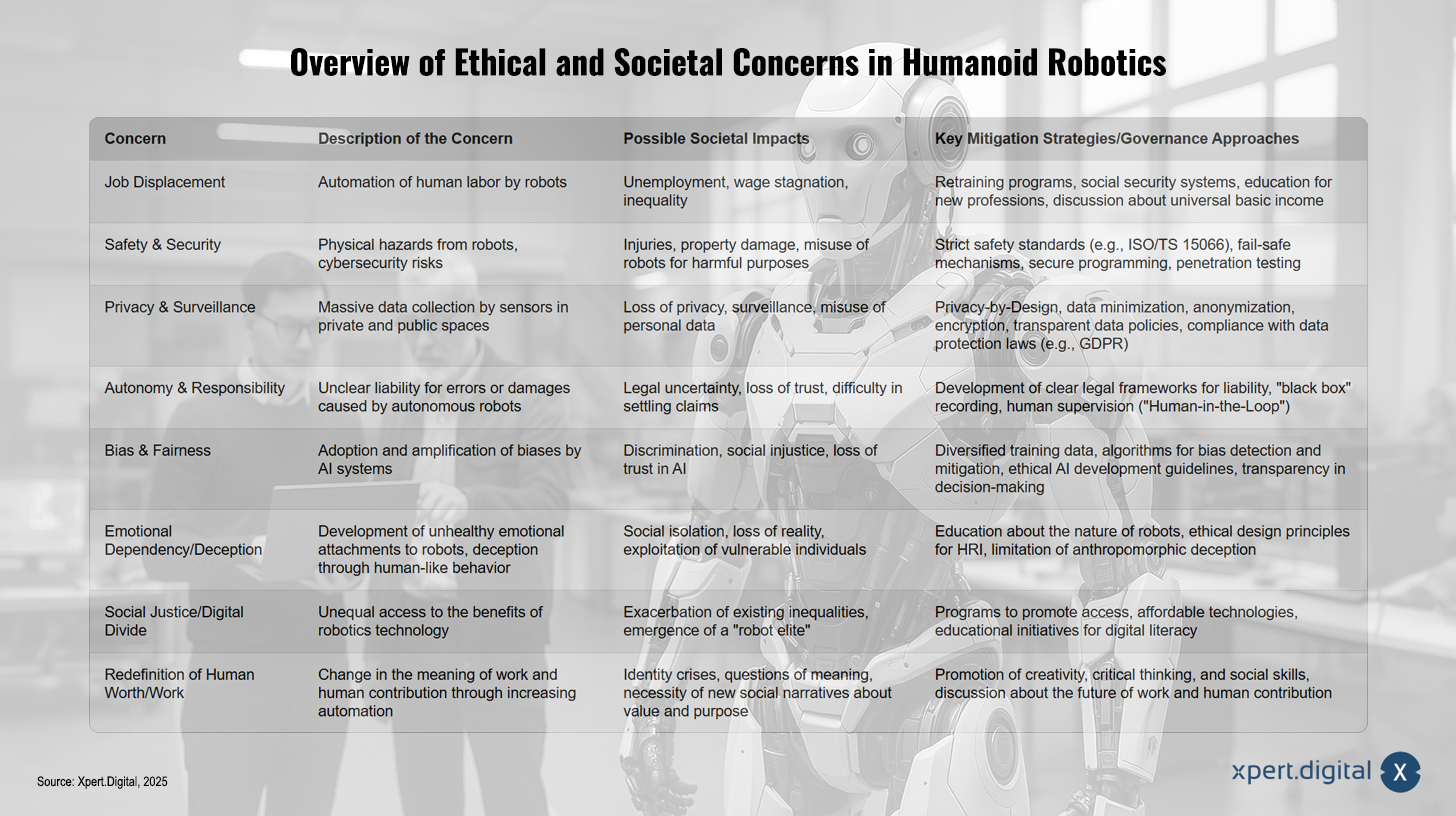
Přehled etických a společenských obav v oblasti humanoidní robotiky – Obrázek: Xpert.Digital
Etické a společenské obavy týkající se humanoidní robotiky lze rozdělit do několika kategorií. Klíčovým aspektem je potenciální ztráta pracovních míst, která může být důsledkem automatizace lidské práce roboty. To by mohlo vést k nezaměstnanosti, stagnaci mezd a rostoucí nerovnosti. Mezi navrhovaná protiopatření patří rekvalifikační programy, sociální záchranné sítě, vzdělávací iniciativy pro nová povolání a diskuse o univerzálním základním příjmu. Dalším problémem je bezpečnost a ochrana, protože roboti by mohli představovat fyzické nebezpečí nebo být zneužiti v důsledku kybernetických rizik. Aby se předešlo zraněním, poškození majetku nebo škodlivému použití, jsou nezbytné přísné bezpečnostní normy, mechanismy zabezpečené proti selhání, bezpečné programování a komplexní penetrační testování.
Otázky soukromí a sledování nabývají na významu kvůli masivnímu sběru dat robotickými senzory, protože to s sebou nese ztrátu soukromí a riziko zneužití osobních údajů. Ochranná opatření zahrnují ochranu soukromí již v návrhu, minimalizaci dat, anonymizaci, šifrování, transparentní zásady ochrany dat a dodržování zákonů na ochranu osobních údajů, jako je GDPR. Autonomie a odpovědnost autonomních robotů vyvolávají otázky ohledně odpovědnosti v případě chyb nebo škod, což může vést k právní nejistotě, ztrátě důvěry a obtížím při likvidaci pojistných událostí. Jasné právní rámce, záznamy „černé skříňky“ a lidský dohled – známý také jako „human-in-the-loop“ – jsou nezbytné.
Dále existují obavy ohledně zaujatosti a spravedlnosti, jelikož systémy umělé inteligence mohou přijímat a zesilovat předsudky, což může vést k diskriminaci a sociální nespravedlnosti. Strategie, které se s těmito obavami zabývají, zahrnují diverzifikovaná tréninková data, specializované algoritmy pro detekci a zmírňování zaujatosti, etické směrnice pro vývoj umělé inteligence a transparentnost v rozhodování. Problém představuje také emoční závislost nebo klamání ze strany robotů, zejména pokud uvádějí lidi v omyl chováním podobným lidskému a podporují emocionální vazby. V této souvislosti je klíčové zvyšovat povědomí o skutečné povaze robotů, zavádět etické principy designu v interakci člověk-robot (HRI) a omezovat antropomorfní klamné strategie.
Další společenské dopady se týkají sociální spravedlnosti a digitální propasti, jelikož nerovný přístup k technologiím založeným na robotice by mohl zhoršit stávající nerovnosti a vytvořit „robotickou elitu“. Vhodnými protiopatřeními jsou vzdělávací iniciativy podporující digitální gramotnost, programy na podporu přístupu k ní a cenově dostupné technologie. A konečně, rozvoj automatizace je zasazen do kontextu redefinice lidské hodnoty a práce. To by mohlo vyvolat krize identity a otázky smyslu, přičemž se stanou nezbytnými nové společenské narativy o hodnotě a účelu lidské činnosti. Důležitými přístupy k řešení těchto výzev je podpora kreativity, kritického myšlení a sociálních dovedností, stejně jako podpora otevřené diskuse o budoucnosti práce.
Společenský dopad
- Budoucnost práce: Integrace humanoidních robotů povede k transformaci pracovních rolí, vytvoření nových profesí (např. údržba robotů, programování umělé inteligence, etické úředníky) a zdůrazní potřebu celoživotního vzdělávání. Zároveň nabízí potenciál pro významné zvýšení produktivity a hospodářský růst.
- Sociální spravedlnost a přístupnost: Existuje riziko zhoršení digitální propasti, pokud bude přístup k prospěšným robotickým technologiím nerovnoměrně rozdělen. Zároveň roboti nabízejí potenciál pro zlepšení přístupnosti pro osoby se zdravotním postižením. Objevuje se potenciální paradox: Zatímco humanoidi jsou vyvíjeni za účelem zmírnění nedostatku pracovních sil a převzetí nežádoucích úkolů, jejich široké přijetí by mohlo vytvořit nové formy sociální stratifikace založené na přístupu k těmto technologiím a kontrole nad nimi. To by mohlo digitální propast prohloubit, pokud nebude spravováno spravedlivě. Humanoidi slibují zaplnění mezer v pracovní síle, ale jejich vývoj a nasazení vyžaduje značný kapitál a odborné znalosti. Pokud přístup k těmto nástrojům zvyšujícím produktivitu zůstane omezen na bohaté národy nebo velké korporace, mohlo by to zhoršit ekonomické nerovnosti na globální i v rámci společností. Překlenutí digitální propasti se stává ještě důležitějším ve věku pokročilé robotiky.
- Vnímání a důvěra veřejnosti: Budování důvěry veřejnosti je pro přijetí zásadní. Pro to je nezbytná transparentnost ve využívání dat, jasná komunikace a řešení otázek bezpečnosti a soukromí. Roli hrají také kulturní rozdíly v očekáváních od HRI a přijetí robotů.
- Nová definice lidské hodnoty a poslání: S tím, jak roboti přebírají stále více úkolů, se zintenzivní společenské diskuse o hodnotě lidské práce, kreativity a sociálních vztahů.
Správa a regulace
Pro vývoj a nasazení humanoidních robotů jsou zapotřebí robustní právní a etické rámce. Stávající mezinárodní bezpečnostní normy (např. ISO/TS 15066 pro kolaborativní roboty) musí být pro pokročilé humanoidy dále rozvíjeny. Zásadní jsou zásady, jako je transparentnost, spravedlnost, odpovědnost, lidský dohled a zásada neškodnosti. Relevantní jsou zásady ochrany soukromí již od návrhu a předpisy o ochraně osobních údajů (např. GDPR). Vytváření globálně harmonizovaných předpisů je náročné kvůli rozdílným kulturním hodnotám a prioritám. Zákon EU o umělé inteligenci slouží jako příklad regulace založené na riziku.
Z tovární haly do obývacího pokoje: Humanoidi v měnících se oblastech použití – Plán (2025–2035 a dále)
Nadcházející roky a desetiletí slibují neustálý a zrychlený rozvoj humanoidní robotiky, poháněný technologickými průlomy a rostoucí akceptací na trhu. Cesta k širokému přijetí však není lineární, ale pravděpodobně bude zahrnovat cykly humbuku, deziluze a nakonec produktivity (analogicky s cyklem humbuku Gartner). Různé aplikace budou dozrávat různým tempem. První úspěchy ve strukturovaných průmyslových prostředích budou klíčové pro zajištění financování a trvalého výzkumu a vývoje složitějších, nestrukturovaných aplikací. Gartner v současné době řadí humanoidy na „inovační spouštěč“ a Forrester zaznamenává jejich rychlý nárůst významu. Historické zavádění technologií často následuje po takových cyklech. Počáteční průmyslové nasazení (automobilový průmysl, logistika) poskytne klíčové ověření a příjmy. Pokud tyto první aplikace splní očekávání návratnosti investic, povede to k dalším investicím nezbytným k řešení náročnějších domácích nebo vysoce interaktivních prostředí, která leží dále v časovém horizontu.
Technologie nové generace
- Senzory: Očekává se neustálý pokrok v oblasti vizuálních systémů (vyšší rozlišení, lepší zpracování pomocí umělé inteligence), hmatových senzorů (větší citlivost, odolnost, nákladová efektivita) a propriocepce. Klíčovou roli bude hrát fúze multimodálních senzorů.
- Pohony: Vyvíjejí se energeticky účinnější, kompaktnější a responzivnější elektrické pohony. Potenciální průlomy v oblasti pohonů měkké robotiky by mohly vést k vyhovujícím a bezpečnějším HRI.
- Materiály: Vyvíjejí se lehčí, pevnější a odolnější materiály. Do popředí zájmu se dostávají i samoopravitelné materiály a materiály s integrovanými senzorovými funkcemi.
- Energetické systémy: Baterie s vyšší energetickou hustotou (např. polovodičové baterie), rychlejšími dobami nabíjení a vylepšenými systémy správy baterií (BMS) jsou klíčové pro delší provozní dobu a zvýšenou bezpečnost.
- Umělá inteligence a obecná inteligence: Pokroky v oblasti umělé obecné inteligence (AGI) umožní robotům učit se složitější úkoly s menším množstvím dat, myslet abstraktně, hluboce chápat kontexty a projevovat zdravý rozum. Virtuální vzdělávací oblasti (VLA) a multimodální modely se stanou sofistikovanějšími. Dlouhodobá vize AGI u humanoidů bude vyžadovat zásadní přehodnocení vztahů mezi člověkem a umělou inteligencí a potenciálně povede k novým formám spolupráce, vzájemné závislosti a dokonce i společenským strukturám, které je z dnešního pohledu obtížné předvídat. AGI znamená roboty s učením a uvažováním podobným lidskému. Jakmile toho humanoidi dosáhnou, stanou se více než jen nástroji; stanou se partnery nebo dokonce autonomními agenty. To vyvolává hluboké otázky ohledně jejich role ve společnosti, jejich rozhodovací pravomoci a povahy „práce“ a „inteligence“. Nezbytné společenské úpravy by byly mnohem rozsáhlejší než ty, které jsou nutné pro současné úzce zaměřené aplikace umělé inteligence.
Předpokládané milníky a časové harmonogramy pro zavedení
- Krátkodobé (2025–2027):
- Pilotní projekty narůstají v automobilovém a logistickém průmyslu. Tesla a BYD plánují v letech 2025–2026 nasadit tisíce jednotek.
- První komerční uvedení na trh pro specifické, jasně definované úkoly v těchto odvětvích.
- Zaměřte se na zlepšení spolehlivosti, snížení nákladů a prokázání jasné návratnosti investic v průmyslovém prostředí.
- Očekává se, že využití humanoidů v logistice nabere na obrátkách v letech 2026-2027.
- Střednědobý horizont (2028–2033):
- Rozšíření na složitější úkoly v průmyslovém prostředí.
- Širší přijetí v dalších komerčních službách (maloobchod, pohostinství) a specializovaných rolích ve zdravotnictví.
- Zrání modelů RaaS, což zvyšuje dostupnost.
- Významné vylepšení obratnosti, výdrže baterie a schopností umělé inteligence.
- Potenciál pro omezené, kontrolované použití v domácí/osobní asistenci pro specifické úkoly.
- Dlouhodobý horizont (2034–2040+):
- Široké uplatnění v mnoha odvětvích a potenciálně i v soukromých domácnostech pro obecné asistenční úkoly.
- Humanoidní roboti schopní autonomnějšího rozhodování a provozu ve vysoce nestrukturovaných prostředích.
- Užší integrace do lidské společnosti, která by mohla vést k významným transformacím trhu práce a redefinici práce.
- Morgan Stanley předpovídá, že v USA bude do roku 2040 8 milionů pracujících humanoidů a do roku 2050 63 milionů.
Transformační potenciál a dlouhodobá vize
Humanoidní roboti jsou vnímáni jako univerzální nástroje, které mohou rozšířit lidské schopnosti téměř v každém odvětví. Mají potenciál řešit závažné společenské výzvy, jako je nedostatek pracovních sil, stárnoucí populace a nebezpečná práce, a zlepšit kvalitu života. Mnozí vidí „moment iPhonu“ pro robotiku jako nadešel, což vede k masovému přijetí a nové éře spolupráce člověka a stroje. Ekonomický potenciál je obrovský, s vyhlídkou na zvýšení produktivity a růst HDP. Dlouhodobá vize zahrnuje roboty, kteří se bezproblémově integrují do každodenního života, vykonávají širokou škálu úkolů a přirozeně interagují s lidmi. Vývoj „univerzálních humanoidů“ je snahou o „univerzální fyzické rozhraní“. Pokud by toho bylo dosaženo, mohlo by to komodificirat mnoho forem fyzické práce a specializovaný robotický hardware, podobně jako univerzální počítače komodificiraly specializované výpočetní stroje. Cílem je robot schopný vykonávat mnoho úkolů. Pokud by jediná humanoidní platforma, prostřednictvím pokročilé umělé inteligence a adaptabilního hardwaru, mohla vykonávat úkoly, které v současné době vyžadují více specializovaných robotů nebo lidských pracovníků, představovalo by to změnu paradigmatu. Tato „univerzálnost“ by mohla vést k úsporám z rozsahu ve výrobě a výrazně snížit potřebu různých typů specializovaného automatizačního zařízení, což by zásadně transformovalo trh s robotikou a ekonomiku práce.
Vhodné pro:

Od sci-fi k realitě: Začíná éra humanoidních robotů
Humanoidní robotika se nachází v klíčovém bodě svého vývoje. Díky významnému pokroku v oblasti umělé inteligence, vylepšeným hardwarovým komponentám a rostoucí poptávce na trhu se tyto humanoidní stroje vyvíjejí z pouhých výzkumných objektů na hmatatelná řešení reálných problémů v průmyslu, zdravotnictví a dalších oblastech. Vize robotů bezproblémově spolupracujících s lidmi a plnících úkoly v prostředích navržených člověkem se blíží realitě.
Analýza ukázala, že technologické základy, zejména v oblasti aktuátorů, senzorů, napájení a řízení založeného na umělé inteligenci, se rychle rozvíjejí. Zároveň složitost replikace lidské obratnosti a inteligence, vysoké náklady, škálovatelnost výroby a zajištění bezpečnosti a spolehlivosti i nadále představují značné výzvy. Trh vykazuje obrovský růstový potenciál, jak dokazují četné prognózy, ale rychlost širokého komerčního přijetí bude záviset na tom, jak efektivně budou tyto překážky překonány.
Etické a společenské důsledky jsou hluboké a vyžadují proaktivní zapojení. Je třeba řešit otázky propouštění, ochrany dat, odpovědnosti a bezpečnosti, stejně jako jemnější aspekty interakce člověka s robotem a přijetí ze strany veřejnosti. Zodpovědná inovace založená na široké spolupráci mezi průmyslem, akademickou obcí, vládou a veřejností, spolu s progresivní správou, je nezbytná pro zajištění toho, aby vývoj a nasazení humanoidních robotů sloužilo společnému dobru.
Stručně řečeno, humanoidní roboti mají potenciál v nadcházejících desetiletích zásadně transformovat práci, společnost a každodenní život. I když je cesta od sci-fi k každodenní realitě stále plná výzev, dynamika pokroku je nepopiratelná. Úspěšná integrace těchto technologií bude vyžadovat rovnováhu mezi technologickými ambicemi, ekonomickou životaschopností a etickou odpovědností. Nadcházející roky budou klíčové pro určení, zda a jak lze tento transformační potenciál plně realizovat, přičemž klíčovým milníkem bude přechod od specializovaných aplikací k obecnějším schopnostem.
Jsme tu pro Vás - poradenství - plánování - realizace - projektové řízení
☑️ Podpora MSP ve strategii, poradenství, plánování a implementaci
☑️ Vytvoření nebo přeladění digitální strategie a digitalizace
☑️ Rozšíření a optimalizace mezinárodních prodejních procesů
☑️ Globální a digitální obchodní platformy B2B
☑️ Pioneer Business Development

Konrad Wolfenstein
Rád posloužím jako váš osobní poradce.
Můžete mě kontaktovat vyplněním kontaktního formuláře níže nebo mi jednoduše zavolejte na číslo +49 89 89 674 804 (Mnichov) .
Těším se na náš společný projekt.
Napište mi

Xpert.Digital - Konrad Wolfenstein
Xpert.Digital je centrum pro průmysl se zaměřením na digitalizaci, strojírenství, logistiku/intralogistiku a fotovoltaiku.
S naším 360° řešením pro rozvoj podnikání podporujeme známé společnosti od nových obchodů až po poprodejní služby.
Market intelligence, smarketing, automatizace marketingu, vývoj obsahu, PR, e-mailové kampaně, personalizovaná sociální média a péče o potenciální zákazníky jsou součástí našich digitálních nástrojů.
Více se dozvíte na: www.xpert.digital - www.xpert.solar - www.xpert.plus
Zůstaňte v kontaktu



















