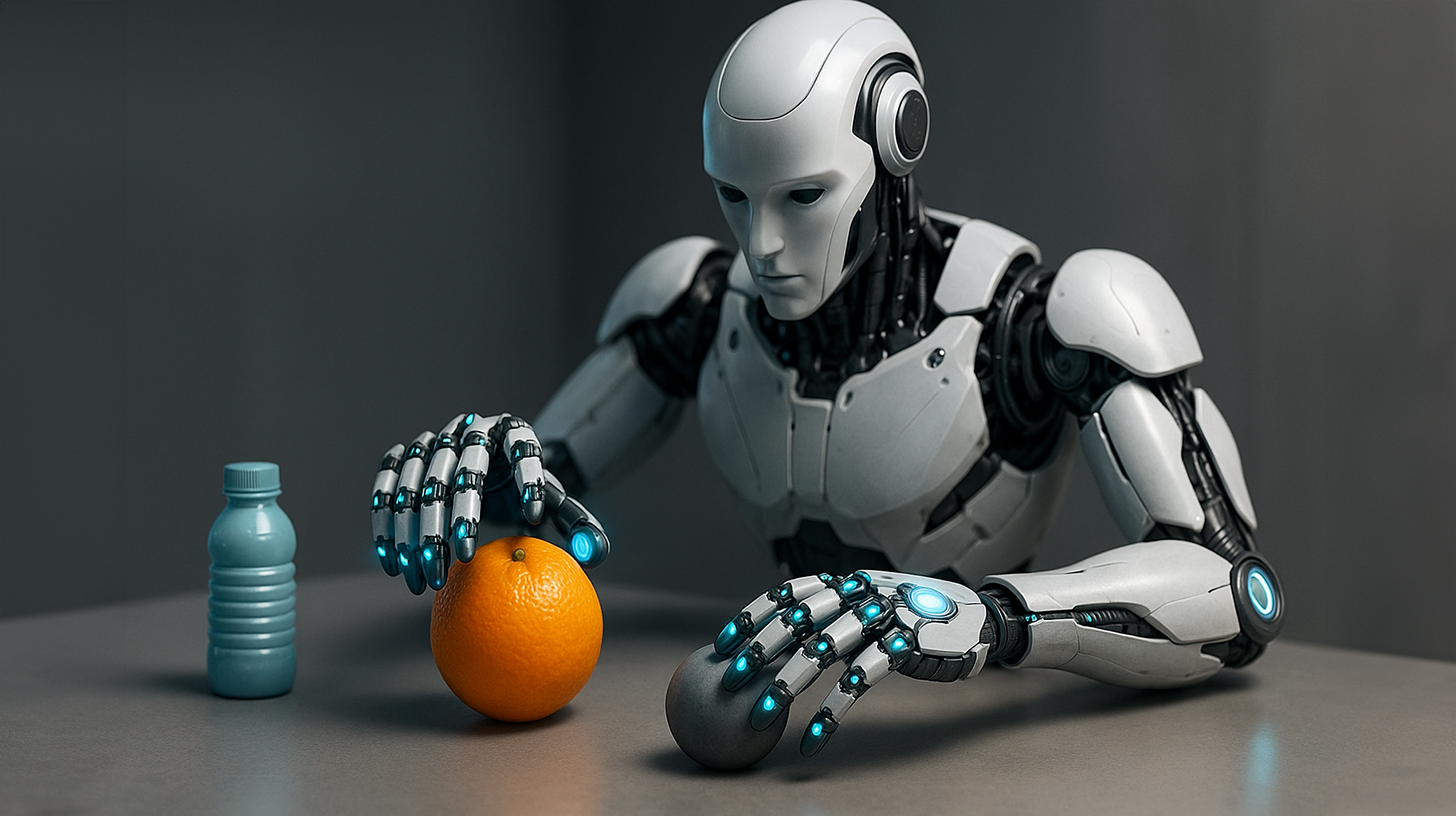
触觉机器人:拥有触觉的机器人:Vulcan 和麻省理工学院合作研发的新一代触觉物体识别机器人——图片来源:Xpert.Digital
麻省理工学院的物体识别系统无需特殊传感器,以及亚马逊的Vulcan机器人
机器触觉感知:树立物体识别新标准
在机器人领域,触觉传感器和识别系统的发展是一项关键性的进步,它首次使机器不仅能够“看到”周围环境,还能“感受”它。亚马逊的新型Vulcan机器人和麻省理工学院的创新物体识别系统便是这一发展的例证。这两项技术都极大地拓展了机器人的应用范围,并使机器人能够完成以前只有人类凭借其自然触觉才能完成的任务。.
与此相关:


亚马逊的Vulcan机器人:触觉机器人抓取领域的突破
功能和技术基础
亚马逊开发的Vulcan机器人代表了物理人工智能领域的一项重大技术进步。亚马逊将其描述为“机器人技术和物理人工智能领域的突破”。该系统由两个主要组件构成:“Stow”用于存储物体,“Pick”用于取用物体。其最突出的特点是能够通过触觉感知周围环境。.
Vulcan触觉能力的技术基础在于其特殊的力矩传感器,形状类似冰球,使机器人能够“感知”抓取物体时可以施加多大的力而不损坏物体。亚马逊机器人人工智能总监亚当·帕内斯强调了这种方法的独特性:“Vulcan并非我们首款能够移动物体的机器人。但凭借其触觉——即感知何时以及如何与物体接触的能力——它为优化工作流程和设施开辟了新的可能性。”.
为了将物品摆放到货架上,Vulcan 使用一种类似尺子的工具,该工具连接在一个直发器上。他用这把“尺子”将其他物品推到一边,腾出空间放置新物品。机械臂会根据物品的大小和形状调整抓取力度,而集成的传送带则将物品送入容器中。为了取出物品,Vulcan 使用吸盘式抓手和摄像头系统。.
当前应用领域及性能
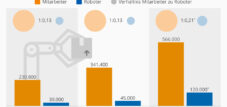
Vulcan机器人目前正在亚马逊的两个物流中心进行测试:一个位于德国汉堡附近的温森,另一个位于美国华盛顿州的斯波坎。在华盛顿,六台Vulcan Stow机器人已投入使用,成功存储了50万件商品。在温森,两台Vulcan Pick机器人正在运行,已处理了5万份订单。.
该系统的功能令人瞩目:Vulcan 目前可以处理亚马逊数百万种商品中的约 75%。它能操控的最小物体大小与口红或 U 盘相仿。尤其令人印象深刻的是它能够实时识别物体,正如 Parness 所解释的,“它不可能记住所有物品的具体信息”。.
未来计划及与物流链的整合
亚马逊计划在未来几年大幅增加Vulcan机器人的数量。今年,位于温森的Vulcan机器人数量预计将增至60台,位于华盛顿的Vulcan机器人数量预计将增至50台。其长期计划是将这些机器人部署到遍布欧洲和美国的物流中心。.
亚马逊战略的关键在于人机共存。公司的“总体规划”设想人机并肩工作。机器人主要用于搬运货架上那些人类无法直接够到(需要借助梯子)或需要过度弯腰才能取用的商品。此举有望提高整体效率,同时减轻员工的工作负担。.
麻省理工学院的目标检测系统通过处理实现:无需特殊传感器的智能“感知”
创新的物体识别方法
与亚马逊的Vulcan机器人并行,麻省理工学院、亚马逊机器人公司和不列颠哥伦比亚大学的研究人员开发了一种不同的系统,旨在赋予机器人触觉能力。这项技术使机器人能够通过拿起物体并轻轻摇晃来识别物体的属性,例如重量、柔软度或内容物——就像人类处理陌生物体时一样。.
这种方法的特别之处在于它不需要特殊的触觉传感器。相反,该系统利用了大多数机器人中已有的关节编码器——这些传感器可以检测运动过程中关节的旋转位置和速度。麻省理工学院博士后、该研究论文的第一作者彼得·伊辰·陈解释了该项目的愿景:“我的梦想是让机器人走向世界,让它们能够触摸和移动物体,并独立地发现它们所接触的一切事物的特性。”.
技术功能和仿真模型
麻省理工学院这套系统的核心由两个仿真模型组成:一个模拟机器人及其运动,另一个复制物体的动力学特性。另一位麻省理工学院博士后刘超强调了这些数字孪生的重要性:“对于我们方法的成功而言,一个精确的真实世界数字副本至关重要。”.
该系统采用一种名为“可微分仿真”的技术,该技术使算法能够预测物体属性(例如质量或柔软度)的微小变化将如何影响机器人关节的最终位置。一旦仿真结果与机器人的实际运动相匹配,系统就识别出了物体的正确属性。.
该方法的关键优势在于其高效性:该算法可在数秒内完成计算,且仅需机器人实际运动轨迹即可运行。这使得该系统具有极高的成本效益,并适用于实际应用。.
应用潜力和优势
这项已开发的技术在摄像头效果不佳的应用场景中可能特别有用,例如在黑暗的地下室中整理物品,或者在地震后清理部分倒塌的建筑物中的碎片。.
由于该算法无需像某些依赖计算机视觉或外部传感器的方法那样使用大型数据集进行训练,因此在面对未知环境或新物体时不易出错。这使得该系统具有极强的鲁棒性和通用性。.
机器人触觉传感器的更广泛研究概况
根本性挑战和现有解决方案
研发具有触觉的机器人给研究人员带来了根本性的挑战。人类的触觉系统极其复杂精细,而人工智能系统必须利用技术手段来复制这种特性。加州大学伯克利分校的机器人专家肯·戈德堡强调了这项任务的复杂性:“人类的触觉极其精细复杂,动态范围也极其广阔。虽然机器人技术正在快速发展,但我认为在未来五到十年内,我们很难看到触觉传感器达到人类的水平。”.
尽管面临这些挑战,研究领域仍取得了显著进展。例如,弗劳恩霍夫IFF研究所正在开发触觉传感器系统,该系统能够实现反应式抓取,模拟人手的动作,非常适合处理易碎或柔性物体。传感器数据可用于机械臂自适应、部件和位置识别以及过程监控。.
触觉机器人领域的创新研究项目
除了亚马逊和麻省理工学院的研究成果外,触觉机器人传感器领域还有其他一些重要的研究项目:
马克斯·普朗克智能系统研究所开发了一种名为Insight的触觉传感器,能够以极高的灵敏度检测触摸。该研究所研究小组负责人格奥尔格·马蒂乌斯强调了该传感器的性能:“我们的传感器之所以能够展现出卓越的性能,得益于其创新的外壳机械设计、内部定制的成像系统、自动数据采集以及最先进的深度学习方法。”该传感器灵敏度极高,甚至可以感知自身相对于重力的方向。.
另一个有趣的项目是DensePhysNet,该系统能够主动执行一系列动态交互(例如滑动和碰撞),并利用深度预测模型分析其视觉观测结果,从而学习反映被观测物体物理属性的密集像素级表征。在模拟环境和真实环境中进行的实验表明,学习到的表征包含丰富的物理信息,可以直接用于解码摩擦力和质量等物理对象属性。.
与此相关:

触觉机器人系统的未来前景
多模态传感器系统的集成
触觉机器人技术的未来在于不同感觉模式的融合。麻省理工学院的研究人员已经在着手训练人工智能,使其能够整合视觉和触觉等多种感觉。通过理解这些不同感觉模式之间的相互作用,机器人可以更全面地感知周围环境。.
麻省理工学院的研究团队已经计划将他们的目标检测方法与计算机视觉相结合,以创建一个功能更强大的多模态传感器系统。“这项工作并非旨在取代计算机视觉。两种方法各有优缺点。但我们已经证明,即使没有摄像头,我们也能发现其中的一些特性,”陈解释道。.
应用领域拓展与未来发展
麻省理工学院的研究团队还希望探索这项技术在更复杂的机器人系统(例如软体机器人)和更复杂的物体(包括晃动的液体或沙子等颗粒状介质)中的应用。从长远来看,他们希望利用这项技术改进机器人的学习能力,使未来的机器人能够快速掌握新的操作技能并适应环境变化。.
亚马逊计划在未来几年进一步开发并更大规模地部署Vulcan技术。将Vulcan与公司现有的75万台移动机器人整合,预示着一种全面的自动化理念,这有望从根本上改变物流行业。.
触觉学习:当传感器赋予机器人触觉时
以亚马逊的Vulcan和麻省理工学院的物体识别系统为代表的触觉机器人的发展,标志着机器人技术的一个关键转折点。这些技术使机器人能够承担以前只有人类才能完成的任务,因为这些任务需要精细的运动技能和触觉理解能力。.
亚马逊专注于专用传感器,而麻省理工学院则提出利用现有传感器进行触觉推理,这两种不同的方法体现了该领域研究方向的多样性。两种方法各有优势和应用领域。.
随着触觉功能在机器人系统中的日益普及,物流、制造、医疗保健等诸多领域复杂任务的自动化迎来了新的机遇。机器人不仅能够“看”到周围环境,还能“感受”到周围环境,这使我们距离机器人与人类能够更加紧密、更加直观地协作的未来更近了一步。.
与此相关: