
Телеоперація роботів: Коли людська рука долає відстань
Xpert попередня випуск

Available in 27 languages 📢
Віддавайте перевагу Xpert.Digital у GoogleⓘОпубліковано: 12 листопада 2025 р. / Оновлено: 12 листопада 2025 р. – Автор: Konrad Wolfenstein
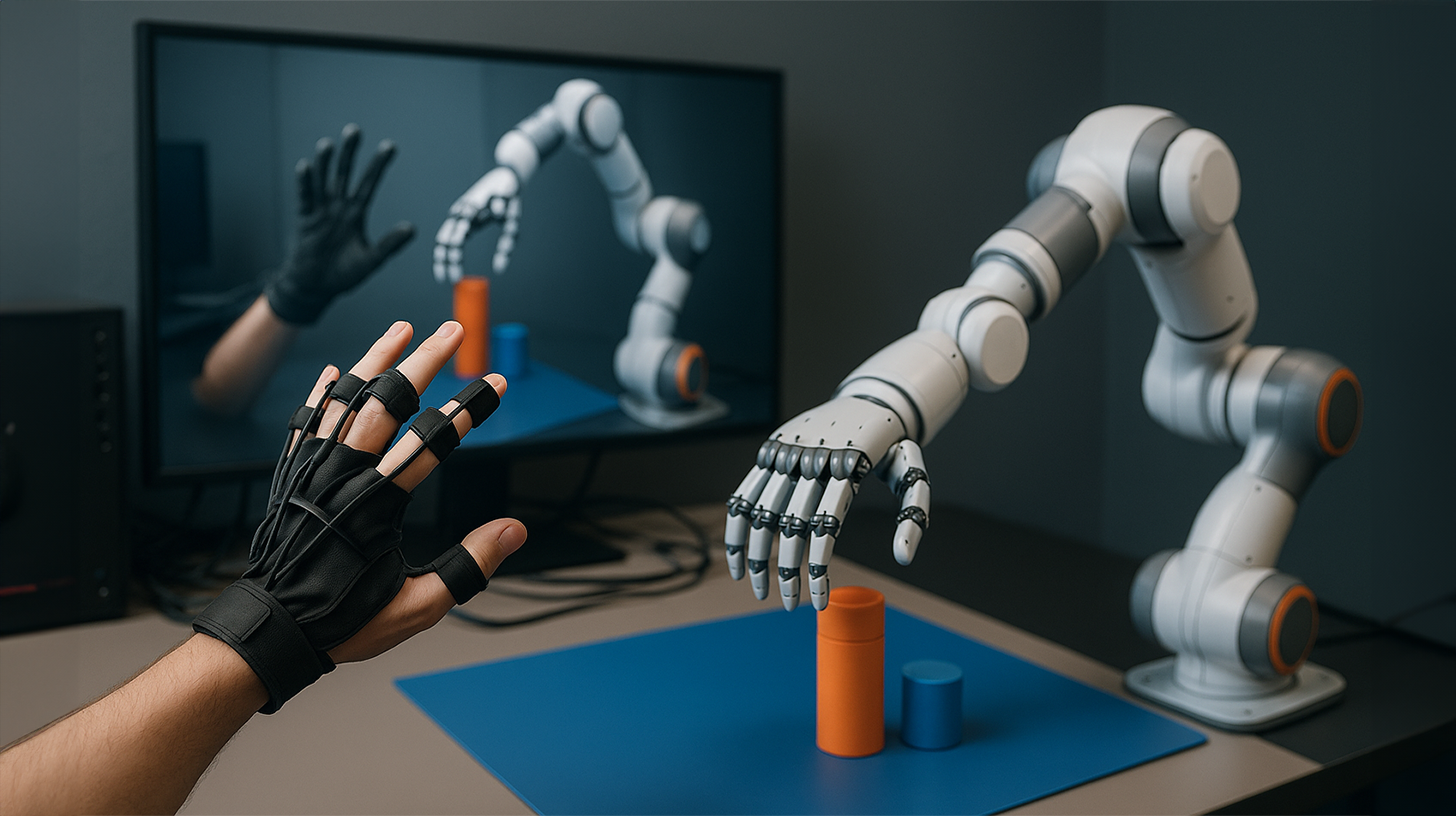
Телеоперація роботів: Коли людська рука підкорює відстань – Зображення: Xpert.Digital
Роботи стають все розумнішими й розумнішими, але чому їм досі потрібна людська рука на відстані?
Від марсоходів до глибоководних видобувних робіт: ці дистанційно керовані роботи працюють там, де жодна людина не може вижити.
Уявіть собі хірурга в Берліні, який проводить високоточну операцію на пацієнті в Токіо, навіть не ступаючи на територію операційної. Робот досліджує глибини океану, поки його пілот безпечно сидить на березі, відчуваючи кожен рух, ніби він присутній там особисто. Те, що звучить як далека наукова фантастика, є захопливою реальністю телеоперації – технології, яка дозволяє людям керувати роботами як продовженням власного тіла на величезних відстанях. В епоху штучного інтелекту та автономії телеоперація доводить фундаментальний принцип: людська інтуїція, судження та контроль незамінні.
Але телехірургія — це набагато більше, ніж просто медичне диво. Це невидима сила, яка дозволяє орієнтуватися на марсоходах на Марсі, видобувати ресурси з важкодоступних шахт або вирушати в радіоактивно забруднені зони лиха. Цей комплексний огляд не лише висвітлює вражаючі технології, що стоять за цією революцією. Ми заглиблюємося в її дивовижне походження, яке сягає корінням у далекоглядного Ніколи Тесли, аналізуємо критичні проблеми, такі як жахлива затримка зв'язку, яка визначає успіх чи невдачу, та стикаємося з глибокими етичними питаннями, пов'язаними з дистанційним керуванням життям та роботою. Приєднуйтесь до нас у подорожі, яка переосмислить межі між присутністю та відсутністю та розкриє, як цифрове дублювання людства назавжди змінює наш світ.
Цифрове дублювання людей – як телеоперація долає межі, рухає науку та кидає виклик усталеним нормам
Телеоперація роботів є одним із найцікавіших парадоксів сучасних технологій: вона дозволяє людині-оператору бути фізично відсутнім, одночасно діючи з абсолютною присутністю. Хірург у Нью-Йорку може провести операцію в Токіо. Інспектор залишається в безпеці, поки його роботизований аватар спускається в радіоактивно забруднені руїни. Гірничодобувна компанія експлуатує підводні шахти, навіть не ступаючи ногою у воду. Це не наукова фантастика, а сучасна реальність технології, яка фундаментально змістила класичні межі між присутністю та відсутністю, між фізичними можливостями та когнітивним контролем.
У світі, де домінує автоматизація, може здатися парадоксальним, що телеоперація — пряме дистанційне керування машинами людиною — не лише виживає, а й процвітає. Однак це спостереження розкриває глибше розуміння технологій: автономія цінна, але контроль є важливим. Телеоперація є найвищим втіленням цього принципу, технологією, яка поєднує людський інтелект, інтуїцію та прийняття рішень із грубою фізичною потужністю та нечутливістю механічних систем. Ринок телекерованих роботизованих систем оцінюється приблизно в 890 мільйонів доларів у 2025 році та, за прогнозами, зросте до понад 4 мільярдів доларів до 2032 року. Це не просто ознака економічного інтересу, а й свідчення фундаментальної трансформації, яку ця технологія спричиняє в сучасному суспільстві.
Історичне походження: від мрії Тесли до сучасної реальності
Історія телеоперацій починається не з комп'ютерів, а з людини, чиє ім'я зараз переважно асоціюється з електрикою: Ніколи Тесли. У 1890-х роках Тесла провів новаторські експерименти з бездротовим дистанційним керуванням і усвідомив фундаментальний принцип, що лежить в основі всієї сучасної телеоперації. Тесла розумів, що радіохвилі можуть передавати не лише інформацію, але й команди та керування. Його «Телеавтоматон», репліка човна з дистанційним керуванням, продемонстрував у 1898 році, що машини можуть функціонувати як фізичне продовження людської волі на відстані. Тесла отримав патент США 613 809 на цей винахід, патент, який заклав інтелектуальну основу для всіх наступних систем телеоперацій.
Однак бачення Тесли залишалися значною мірою нереалізованими протягом десятиліть. Лише після Другої світової війни практична необхідність стимулювала розвиток технології. У 1945 році в Аргоннській національній лабораторії поблизу Чикаго американський вчений Раймонд Герц розробив телеманіпулятор типу «головний-підлеглий» для безпечного поводження з радіоактивними матеріалами. Цей пристрій дозволяв працівникам сидіти за метровою бетонною стіною та маніпулювати радіоактивними матеріалами через вікно. Це був перший практичний робот для телеоперацій, який ознаменував перехід від теоретичної можливості до промислової реальності. Інновації прискорилися: електричні серводвигуни замінили прямі механічні зчеплення, а закриті телевізійні системи та камери дозволили операторам вибирати своє робоче положення та мати різні кути огляду.
У 1960-х роках інтереси змістилися до нових рубежів: космічного простору та глибокого моря. Військово-морські сили США, СРСР та Франції дедалі більше цікавилися телеменіпуляторами, оснащеними відеокамерами, встановленими на підводних апаратах. Термін «телеробот» з'явився в цей період, щоб відрізнити їх від традиційних телеоператорів: телероботи мали комп'ютерні системи, здатні приймати, зберігати та виконувати команди за допомогою датчиків та виконавчих механізмів. У 1970-х роках дослідники Феррелл та Шерідан революціонізували польові дослідження за допомогою концепції «диспетчерського контролю», коли оператор повідомляв високорівневі завдання, які комп'ютер потім виконував автономно. Це різко зменшило робоче навантаження оператора та вимоги до пропускної здатності зв'язку.
Ще однією віхою стала розробка прогнозних дисплеїв у 1980-х роках, які дозволили моделювати модель робота на комп'ютері, щоб компенсувати затримки, спричинені латентністю зв'язку. Найяскравішою подією цього розвитку стала успішна демонстрація перших космічних телероботів на борту космічного шатла NASA Німецьким аерокосмічним центром (DLR) у 1993 році із затримкою зв'язку від 6 до 7 секунд.
Хірургічна телеоперація розвивалася паралельним шляхом. У 1990-х роках Дослідницький центр Еймса NASA та Стенфордський університет почали розробляти концепцію телеприсутності в хірургії. Система AESOP компанії Computer Motion отримала схвалення FDA у 1994 році. У 2001 році система SOCRATES (також від Computer Motion) дозволила глобальну співпрацю, дозволивши хірургу керувати роботом з віддаленої операційної консолі, отримуючи відеопотоки з місця операції та аудіозв'язок у режимі реального часу. Ці розробки заклали основу для сучасних систем da Vinci, які домінують у цій галузі сьогодні.
Архітектура та механізми: Технологічна базова структура телеоперацій
Система телеоперацій — це не просто робот із дистанційним керуванням. Це надзвичайно складна взаємодія апаратних компонентів, програмних систем та комунікаційних протоколів, які разом створюють безперешкодне поширення людської волі в просторі та потенційно в часі.
По суті, системи телеоперації складаються з трьох фундаментальних елементів: головного пристрою (також званого станцією керування), підлеглого пристрою або віддаленого робота та каналу зв'язку, який їх з'єднує. Головний пристрій – це інтерфейс між людиною та машиною. Це може бути традиційна панель керування з джойстиками та перемикачами, гарнітура віртуальної реальності з відстеженням рухів рук, екзоскелет, який фіксує рухи оператора, або навіть інтерфейс «мозок-комп'ютер», який інтерпретує мозкову активність оператора. Сучасні системи на основі доповненої реальності використовують гарнітуру HoloLens 2 для забезпечення зондування навколишнього середовища, обробки даних та віртуального керування в режимі реального часу.
Сам робот є веденим пристроєм. Він має виконавчі механізми, які перетворюють команди, отримані від ведучого, на фізичні рухи, а також датчики, які збирають інформацію про його оточення. Ці датчики зазвичай включають камери для візуального зворотного зв'язку, датчики відстані для уникнення перешкод, датчики сили та крутного моменту, а також спеціалізовані датчики для певних застосувань, такі як термометри для перевірок або медичні інструменти для хірургії.
Канал зв'язку є найважливішим елементом і, водночас, ахіллесовою п'ятою сучасних систем телеоперації. У локальних застосуваннях це може бути пряме дротове з'єднання, де затримка зв'язку вимірюється в мілісекундах. Для операцій на більших відстанях, таких як космічні місії або під водою, можуть використовуватися волоконно-оптичні кабелі, радіо або навіть супутникові канали, що призводить до значно більших затримок. Система комунікативного зворотного зв'язку має вирішальне значення: оператор повинен не тільки бачити те, що бачить робот, але й відчувати те, що відчуває робот. Цей тактильний зворотний зв'язок, який передає відчуття опору, текстури та сили, особливо важливий для складних завдань, таких як хірургія або маніпулювання крихкими предметами.
Технологічна реалізація складається з кількох рівнів архітектури керування. Найпростішою формою є пряма телеоперація: кожен рух оператора безпосередньо перетворюється на відповідний рух робота. Більш складною формою є контрольована телеоперація, в якій оператор визначає цілі високого рівня, а робот за допомогою локальних датчиків та комп'ютерного керування автономно визначає шляхи та деталі виконання. Ще складнішою є допоміжна телеоперація, в якій штучний інтелект передбачає наміри оператора та надає пасивну або активну підтримку.
Кінематику та динаміку обох систем — системи екзоскелету «людина-рука» та системи робота-націлювача — необхідно ретельно змоделювати, щоб створити ефективне двонаправлене, безперервне та нелінійне відображення між просторами руху та сили. Це особливо важливо для систем на основі екзоскелетів, де оператор фізично контактує з віддаленим обладнанням.
Ще одним важливим технічним елементом є інтеграція доповненої реальності та віртуальних середовищ в інтерфейс керування. Системи на основі AR дозволяють операторам не лише бачити поточне зображення віддаленого місця, але й отримувати віртуальні накладання даних планування, інформації від датчиків та сповіщень у режимі реального часу. Системи віртуальної реальності, що використовуються в складних підводних операціях з розмінування, створюють цифрові 3D-репліки віддаленого середовища, що дозволяє операторам заздалегідь планувати та оптимізувати свої дії.
Роль 5G та периферійних обчислень у сучасних системах телеоперацій важко переоцінити. 5G забезпечує наднизьку затримку та вищу пропускну здатність, що є критично важливим для керування та зворотного зв'язку в режимі реального часу. Периферійні обчислення, які виконують обробку даних ближче до точки операції, зменшують навантаження на мережу та дозволяють виконувати складніші віддалені завдання.
🎯🎯🎯 Скористайтеся перевагами великої, п'ятикратної експертизи Xpert.Digital у комплексному пакеті послуг | BD, R&D, XR, PR та оптимізація цифрової видимості

Скористайтеся перевагами великого, п'ятикратного досвіду Xpert.Digital у комплексному пакеті послуг | Дослідження та розробки, XR, PR та оптимізація цифрової видимості - Зображення: Xpert.Digital
Xpert.digital має глибокі знання в різних галузях. Це дозволяє нам розробити кравці, розроблені стратегії, пристосовані до вимог та проблем вашого конкретного сегменту ринку. Постійно аналізуючи тенденції на ринку та здійснюючи розвиток галузі, ми можемо діяти з передбаченням та пропонувати інноваційні рішення. З поєднанням досвіду та знань ми створюємо додаткову цінність та надаємо своїм клієнтам вирішальну конкурентну перевагу.
Детальніше про це тут:
Телеоперація: Як віддалені роботи пов'язують медицину, океан і Марс
Поточні застосування: де телеоперація змінює світ сьогодні
Сучасні технології телеоперацій поширилися далеко за межі своєї первісної сфери застосування – ядерної енергетики та космосу. Вони стали інфраструктурою, на якій будуються критично важливі програми в медицині, промисловості, ліквідації наслідків стихійних лих тощо.
Мабуть, найвідомішим застосуванням є телеоперована хірургія. Хірургічна система da Vinci від Intuitive Surgical стала галузевим стандартом. У всьому світі було проведено понад 12 мільйонів телеоперованих операцій, і система навчила понад 60 000 хірургів у всьому світі. Тільки у 2023 році за допомогою платформ da Vinci було проведено понад 2,2 мільйона операцій, і очікується, що до кінця 2024 року їх кількість перевищить 2,5 мільйона. Система оснащена консоллю, з якої хірург працює, використовуючи 3D-зображення операційного поля, а дистанційно керовані роботизовані маніпулятори направляють інструменти з мікрометровою точністю. Переваги значні: менші розрізи, зменшення крововтрати, швидше відновлення та зменшення фізичного навантаження на хірурга.
З 2024 року на ринок також вийшли нові системи, такі як Hugo RAS від Medtronic, що базуються на технології DLR-MIRO, пропонуючи більш економічно ефективну альтернативу, яка має потенціал зробити телеоперовану хірургію доступнішою для менших лікарень.
Ще однією важливою сферою застосування є дослідження космосу. Марсохід NASA «Perseverance» керується операторами на Землі за допомогою дистанційного керування, із затримкою зв’язку від 5 до 20 хвилин (залежно від положення Землі та Марса). Це вимагає напівавтономної роботи марсохода, коли команди високого рівня видаються оператором, але марсохід приймає локальні навігаційні рішення. Таке поєднання дистанційного керування та автономності стане ще більш важливим у майбутніх місіях до інших небесних тіл.
Підводне застосування значно розширилося. Проект VAMOS (Viable Alternative Mine Operating System), що фінансується Європейським Союзом, розробляє дистанційно керовану підводну систему видобутку корисних копалин з високороздільними 3D-інтерфейсами віртуальної реальності для оператора. Системи підключені до наземної станції керування за допомогою високошвидкісних волоконно-оптичних кабелів.
У робототехніці реагування на стихійні лиха телекерування стало рятівним колом. Конкурс DARPA Robotics Challenge продемонстрував використання телекерованих роботів у складних сценаріях катастроф, таких як криза на Фукусімі, де роботи виконували завдання в середовищах, занадто небезпечних для людини. Сучасні системи використовують стереоскопічні дисплеї, що кріпляться на голові, та 3D-зондування навколишнього середовища в режимі реального часу, щоб забезпечити операторам глибоке розуміння віддаленого середовища.
Логістика та доставка на останню милю також стають дедалі популярнішими сферами застосування. На демонстраціях Ericsson у Барселоні водій зміг керувати автономною електричною вантажівкою на відстані понад 2000 кілометрів у Швеції. Телекеровані роботи також використовувалися для переміщення медичних матеріалів на двох стадіонах у Каліфорнії, які було переобладнано на центри лікування COVID-19.
Поточні виклики: Коли технології стикаються з фізичними обмеженнями
Незважаючи на значний прогрес, телеоперації все ще стикаються з фундаментальними викликами, які розкривають межі технологічних можливостей.
Найсерйознішою проблемою є затримка зв'язку або латентність. Хоча локальні системи телеоперацій можуть мати затримки в діапазоні однозначних мілісекунд, ця затримка різко зростає з відстанню. Для місячної хірургії затримка зв'язку становитиме близько 2 секунд туди й назад, тоді як для операцій на Марсі вона може сягати 40 хвилин. Дослідження показали, що продуктивність телеоперацій залишається стабільною приблизно до 300 мілісекунд, але після цього починає погіршуватися, причому помилки відстеження шляху та зіткнень різко зростають після 300 мілісекунд. Хірурги фактично працюють гірше при затримках понад 250-300 мілісекунд, що має серйозні наслідки для дистанційної хірургії.
Рішення, прогнозні дисплеї якого були розроблені ще в 1990-х роках, працювало, але моделювало майбутній стан віддаленої системи на основі команд оператора. Ці методи мають обмеження, особливо у випадку неочікуваних змін навколишнього середовища або коли віддалений робот стикається з опором.
Другою фундаментальною проблемою є тактильний зв'язок. Передача сили, крутного моменту та зворотного зв'язку від дотику через мережі вимагає високої швидкості передачі пакетів і схильна до втрати пакетів і тремтіння, що погіршує стабільність системи та продуктивність користувача. Традиційні інтернет-з'єднання часто не відповідають цим вимогам, що вимагає спеціалізованих протоколів зв'язку та алгоритмів керування.
Третя проблема — це ситуаційна обізнаність оператора. Робот із камерами, встановленими на тілі, пропонує обмежений огляд порівняно з людиною на місці, яка може активно сканувати своє поле зору та оглядатися просторово. Це особливо проблематично у складних або динамічних середовищах. Хоча рішення доповненої та віртуальної реальності можуть допомогти зменшити це, вони можуть призвести до когнітивного перевантаження, якщо представлено забагато інформації.
Пропускна здатність даних є ще одним обмеженням. Передача відео високої роздільної здатності, 3D-сканувань з лідара або інших датчиків може швидко вичерпати доступну ємність мережі, особливо під час підводних або космічних місій, де пропускна здатність обмежена.
Безпека – ще одне ключове питання. Джерела помилок різноманітні: збої в мережі, неочікувані фізичні взаємодії та непередбачувані умови навколишнього середовища. У критичних випадках, таких як хірургія чи реагування на стихійні лиха, помилки можуть бути фатальними. Тому з'являється все більше літератури про надійні системи керування, які можуть обробляти затримки, втрату пакетів та інші невизначеності.
Етичні та суспільні суперечки: темна сторона дистанційного керування
Хоча телеоперація є технічно вражаючою, вона порушує значні етичні, правові та соціальні питання, які досі були розглянуті лише частково.
У телехірургії питання інформованої згоди та автономії пацієнта є центральними. Мовні бар'єри, різні культурні ставлення до роботизованої хірургії та нерівності в інфраструктурі охорони здоров'я значно ускладнюють етичний нагляд. Країни значно відрізняються своєю медичною практикою, системами відповідальності та стандартами захисту даних, що призводить до фрагментованого правового ландшафту. Наразі не існує універсального регулювання цих процедур.
Питання відповідальності є особливо делікатним. Якщо під час телехірургічної процедури трапляється технічна помилка, часто незрозуміло, хто несе відповідальність: хірург, медичний заклад чи постачальник технологій. У транскордонній телехірургії ця неоднозначність ще більше посилюється різними національними юрисдикціями.
Захист даних та безпека даних є ще одними ключовими питаннями. Телехірургія передає конфіденційну інформацію про пацієнтів через кордони, наражаючи її на потенційні порушення безпеки та несанкціонований доступ. Дотримання законів про захист даних, таких як GDPR у Європі або HIPAA у США, є критично важливим.
Ще одним ключовим аспектом є питання рівного доступу. Хоча телехірургія має потенціал для подолання розриву в охороні здоров'я між сільським та міським населенням, а також між країнами з високим та низьким рівнем доходу, реальність часто менш обнадійлива. Дорогі роботизовані системи та необхідна інфраструктура є недоступними для багатьох країн та установ.
У військових цілях та для ліквідації наслідків стихійних лих існують побоювання щодо можливості неправильного використання. Телекеровані дрони та роботизовані системи можуть використовуватися для розвідки, спостереження або навіть наступальних операцій, що викликає питання міжнародного регулювання та етичного використання.
Ще менш дослідженим, але дедалі більше тривожним є вплив на зайнятість. Оскільки телеоперація дозволяє одному оператору керувати кількома віддаленими роботами або передавати висококваліфіковану роботу на аутсорсинг, ринки праці в певних секторах можуть бути суттєво порушені. Робочі місця можуть переміститися з високооплачуваних до низькооплачуваних місць.
Майбутні тенденції: наступний горизонт дистанційного керування
Майбутнє телеоперацій формуватиметься кількома збіжними тенденціями, які потенційно можуть бути трансформаційними.
Штучний інтелект та машинне навчання все частіше інтегруються в системи телеоперацій не для того, щоб замінити людський контроль, а для його покращення. Штучний інтелект може допомагати з плануванням шляху, прогнозувати перешкоди або навіть автоматизувати рутинні підзадачі, дозволяючи оператору-людині зосередитися на прийнятті рішень вищого рівня. Прогнозні моделі можуть передбачати поведінку роботизованих систем і компенсувати затримки зв'язку.
Інтерфейси «мозок-комп'ютер» (ІМК) представляють собою абсолютно новий рубіж. У той час як традиційні інтерфейси, такі як джойстики або сенсори, є відносно інтуїтивно зрозумілими, керування роботами за допомогою безпосередньо захоплених мозкових хвиль може кардинально змінити взаємодію з користувачем. Дослідження вже продемонстрували системи, здатні перетворювати мозкову активність на команди роботів з точністю приблизно 80%. Така система може бути особливо цінною в середовищах, де працівники мають обмежену фізичну мобільність, наприклад, на будівельних майданчиках, під водою або в космосі.
Мережі 5G та майбутні 6G створять фундаментальну інфраструктуру для глобальної телеоперації. Надзвичайно низька затримка та вища пропускна здатність цих мереж дозволять виконувати дистанційні операції з безпрецедентною точністю та швидкістю реагування.
Віртуальна та доповнена реальність продовжують розвиватися для створення більш захопливих та інтуїтивно зрозумілих інтерфейсів керування. Оператори все частіше зможуть віртуально «зайти» у віддалене місце та використовувати свої природні просторові здібності для керування роботом.
Ще однією важливою тенденцією є інтеграція ройової робототехніки, де кілька роботів працюють спільно. Телекерування роєм роботів створює унікальні виклики, але також можливості для значного розширення можливостей реагування на катастрофи та розслідування.
Постійне зниження вартості апаратного та програмного забезпечення для робототехніки зробить телеоперацію доступною для ширшого кола застосувань та організацій. Наприклад, система Hugo пропонує більш економічно ефективну альтернативу системі da Vinci.
Ще однією перспективною тенденцією є поєднання телеоперації з автономними системами. Замість повної автономії чи повної телеоперації, гібридні підходи можуть стати шляхом майбутнього, де робот автономно виконує прості завдання або навігацію, тоді як складні рішення або неочікувані ситуації передаються людині-оператору.
Зрештою, міжнародна співпраця в галузі телеоперацій зростає. Дослідження міжнародних стандартів та передового досвіду будуть розширені, особливо в таких секторах, як медицина, де ймовірна транскордонна співпраця.
Визначальна роль телеоперацій у майбутньому цивілізації
Телеоперація — це більше, ніж технологічний трюк чи спеціальне рішення для прикордонних випадків. Це трансформаційна технологія, яка фундаментально змінює взаємовідносини між людьми та машинами, між локальною та глобальною присутністю, а також між ризиком та безпекою.
Ця технологія виникла з простої істини: є роботи, які люди не можуть виконувати, бо вони занадто небезпечні, занадто віддалені, занадто точні або занадто фізично вимогливі. Телеоперація вирішує цю проблему за допомогою абстракції. Вона абстрагує місце дії від місця її виконання. Оператор у Нью-Йорку може переміщувати робота всередині забрудненого ядерного розплавленого об'єкта з такою ж безпекою та контролем, як якби він знаходився в диспетчерській.
Сучасне застосування телеоперації в хірургії, космосі, підводних операціях та реагуванні на стихійні лиха демонструє глибоку актуальність цієї технології. Кожна з цих галузей надає докази того, що телеоперація не лише працює, але й часто є єдиним практичним рішенням критичних проблем.
Ці проблеми, зокрема затримка зв'язку та тактильний зворотний зв'язок, не є нездоланними. Однак вони вимагають постійних інновацій у комунікаційних мережах, алгоритмах керування та людських інтерфейсах. 5G та майбутні мережі полегшать багато з цих проблем.
Етичні проблеми не менш реальні, але вони також не є унікальними для телеоперацій. Вони є варіаціями універсальних питань щодо технологій, доступу, відповідальності та справедливості. Необхідні будуть продумане регулювання, міжнародні стандарти та відкриті публічні дебати.
Дивлячись у майбутнє, телеоперація, ймовірно, не буде замінена повною автономією, а радше об'єднана з нею. Гібридні системи, в яких роботика має автономні можливості, але переходить до людських операторів для виконання критично важливих завдань або аномалій, можуть стати домінуючою архітектурою.
Який же остаточний висновок? Телеоперація є втіленням фундаментальної людської здатності: здатності розширювати наші можливості за межі наших фізичних тіл. Вона не замінює людяність, а є її продовженням. В епоху швидкої автоматизації та штучного інтелекту телеоперація залишається свідченням незмінної актуальності та цінності людського інтелекту, судження та контролю. Вона не залишиться нішевою галуззю, а стане дедалі помітнішою та критичнішою частиною сучасної технологічної інфраструктури. Ринок зростатиме, технології вдосконалюватимуться, а суспільство навчиться використовувати свої можливості та долати ризики.
Ваш глобальний партнер з маркетингу та розвитку бізнесу
☑ Наша ділова мова - англійська чи німецька
☑ Нове: листування на вашій національній мові!

Konrad Wolfenstein
Я радий бути доступним вам та моїй команді як особистого консультанта.
Ви можете зв’язатися зі мною, заповнивши тут контактну форму або просто зателефонуйте мені за номером +49 89 674 804 (Мюнхен) . Моя електронна адреса: Вольфенштейн ∂ xpert.digital
Я з нетерпінням чекаю нашого спільного проекту.
☑ Підтримка МСП у стратегії, порадах, плануванні та впровадженні
☑ Створення або перестановка цифрової стратегії та оцифрування
☑ Розширення та оптимізація міжнародних процесів продажів
☑ Глобальні та цифрові торгові платформи B2B
☑ Піонерський розвиток бізнесу / маркетинг / PR / Мір
Наша глобальна галузева та економічна експертиза в розвитку бізнесу, продажах та маркетингу

Наша глобальна галузева та бізнес-експертиза в розвитку бізнесу, продажах та маркетингу - Зображення: Xpert.Digital
Галузевий фокус: B2B, цифровізація (від штучного інтелекту до XR), машинобудування, логістика, відновлювані джерела енергії та промисловість
Детальніше про це тут:
Тематичний центр з аналітичними матеріалами та експертними знаннями:
- Платформа знань про світову та регіональну економіку, інновації та галузеві тенденції
- Збір аналізів, імпульсів та довідкової інформації з наших пріоритетних напрямків
- Місце для експертів та інформації про поточні розробки в бізнесі та технологіях
- Тематичний центр для компаній, які хочуть дізнатися про ринки, цифровізацію та галузеві інновації


















