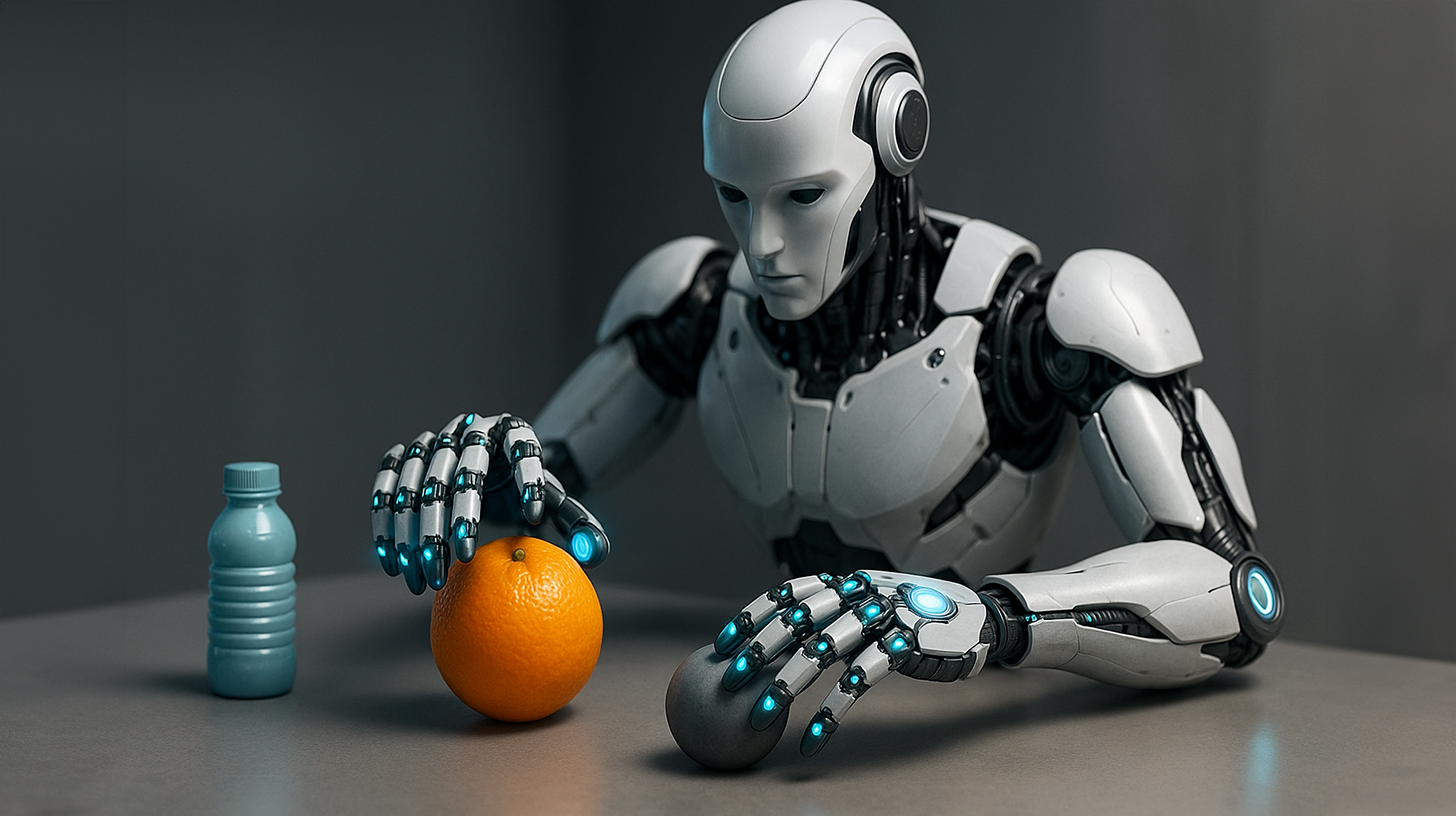
Тактильна робототехніка: Роботи з дотиком: Нове покоління досліджень Vulcan та MIT з тактильного розпізнавання об'єктів – Зображення: Xpert.Digital
Система розпізнавання об'єктів MIT без спеціальних датчиків та робот Vulcan від Amazon
Тактильне сприйняття для машин: встановлення нових стандартів у розпізнаванні об'єктів
У галузі робототехніки розробка тактильних датчиків та систем розпізнавання знаменує собою вирішальний прогрес, який дозволяє машинам вперше не лише бачити своє оточення, а й «відчувати» його. Прикладами цього розвитку є новий робот Vulcan від Amazon та інноваційна система розпізнавання об'єктів від MIT. Обидві технології значно розширюють застосування роботів та дозволяють виконувати завдання, які раніше люди могли виконувати лише за допомогою свого природного тактильного сприйняття.
Пов'язано з цим:


Робот Vulcan від Amazon: прорив у галузі тактильного захоплення роботів
Функціональні та технологічні основи
Робот Vulcan, розроблений Amazon, є значним технологічним проривом у галузі фізичного штучного інтелекту. Сама Amazon описує цю розробку як «прорив у робототехніці та фізичному ШІ». Система складається з двох основних компонентів: «Stow» для зберігання об'єктів та «Pick» для їх вилучення. Її видатною особливістю є здатність тактильно сприймати навколишнє середовище.
Технологічну основу тактильних можливостей Vulcan складають спеціальні датчики сили-крутного моменту, що мають форму хокейної шайби, що дозволяють роботу «відчувати», яку силу він може прикласти, щоб схопити об’єкт, не пошкоджуючи його. Адам Парнесс, директор з робототехніки на базі штучного інтелекту в Amazon, наголошує на унікальності цього підходу: «Vulcan — не наш перший робот, який може переміщувати об’єкти. Але завдяки своєму дотику — здатності розуміти, коли і як він контактує з об’єктом — він відкриває нові можливості для оптимізації робочих процесів і обладнання».
Щоб сортувати предмети на полицях, Вулкан використовує інструмент, схожий на лінійку, прикріплену до випрямляча для волосся. За допомогою цієї «лінійки» він відсуває інші предмети, щоб звільнити місце для нових. Захоплювальні важелі регулюють силу захоплення залежно від розміру та форми предмета, а вбудовані конвеєрні стрічки проштовхують предмет у контейнер. Для вилучення предметів Вулкан використовує вакуумний захоплювач у поєднанні з системою камер.
Поточні сфери застосування та продуктивність
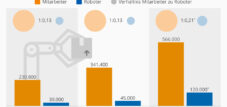
Робот Vulcan зараз проходить випробування у двох логістичних центрах Amazon: у Вінзені поблизу Гамбурга (Німеччина) та в Спокані, штат Вашингтон (США). У Вашингтоні шість роботів Stow Vulcan працюють і вже успішно зберігали півмільйона товарів. У Вінзені працюють два роботи Pick Vulcan, які вже обробили 50 000 замовлень.
Можливості системи вражають: Vulcan наразі може обробляти приблизно 75 відсотків мільйонів товарів, що пропонуються Amazon. Найменший розмір об'єкта, з яким може маніпулювати робот, приблизно еквівалентний розміру губної помади або USB-флешки. Особливо вражає здатність робота ідентифікувати об'єкти в режимі реального часу, оскільки, як пояснює Парнесс, «він не зможе знати всі особливості товарів напам'ять».
Майбутні плани та інтеграція в логістичний ланцюг
Amazon планує значно збільшити кількість роботів Vulcan у найближчі роки. Цього року очікується, що кількість Vulcan у Вінсені зросте до 60, а у Вашингтоні – до 50. Довгостроковий план полягає в розгортанні роботів у логістичних центрах по всій Європі та США.
Ключовим аспектом стратегії Amazon є співіснування людей і машин. «Генеральний план» компанії передбачає пліч-о-пліч з людьми та машинами. Роботи призначені в першу чергу для обробки тих продуктів на полицях, до яких люди не можуть дістатися без драбини або які вимагають надмірного нахиляння. Очікується, що це призведе до підвищення загальної ефективності, одночасно зменшуючи робоче навантаження на працівників.
Система виявлення об'єктів MIT за допомогою обробки: інтелектуальне «сенсорне зондування» без спеціальних датчиків
Інноваційний підхід до розпізнавання об'єктів
Паралельно з Vulcan від Amazon, дослідники з Массачусетського технологічного інституту, Amazon Robotics та Університету Британської Колумбії розробили систему, яка використовує інший підхід до надання роботам тактильних здібностей. Ця технологія дозволяє роботам розпізнавати властивості об'єкта, такі як вага, м'якість або вміст, просто піднімаючи його та обережно струшуючи — так само, як це роблять люди, коли тримають у руках незнайомі предмети.
Особливість цього підходу полягає в тому, що не потрібні спеціальні тактильні датчики. Натомість система використовує суглобові енкодери, які вже присутні в більшості роботів – датчики, що визначають положення обертання та швидкість суглобів під час руху. Пітер Ічен Чен, постдок Массачусетського технологічного інституту та провідний автор дослідницької роботи, пояснює бачення проєкту: «Моя мрія полягала б у тому, щоб відправити роботів у світ, щоб вони могли торкатися та рухати речі та самостійно відкривати властивості всього, з чим вони взаємодіють».
Технічна функціональність та симуляційні моделі
Ядро системи MIT складається з двох симуляційних моделей: одна, яка симулює робота та його рухи, а інша, яка відтворює динаміку об'єкта. Чао Лю, ще один постдок MIT, наголошує на важливості цих цифрових двійників: «Точна цифрова копія реального світу справді необхідна для успіху нашого методу».
Система використовує техніку під назвою «диференційоване моделювання», яка дозволяє алгоритму передбачати, як невеликі зміни властивостей об'єкта, таких як маса чи м'якість, вплинуть на кінцеве положення суглобів робота. Щойно моделювання збігається з фактичними рухами робота, система визначає правильні властивості об'єкта.
Ключовою перевагою цього методу є його ефективність: алгоритм може виконувати обчислення за лічені секунди та для функціонування вимагає лише реальної траєкторії руху робота. Це робить систему особливо економічно ефективною та практичною для реальних застосувань.
Потенціал застосування та переваги
Розроблена технологія може бути особливо корисною в тих випадках, коли камери менш ефективні, наприклад, для сортування предметів у темному підвалі або очищення від уламків у частково зруйнованій будівлі після землетрусу.
Оскільки алгоритм не потребує великого набору даних для навчання, на відміну від деяких методів, що спираються на комп'ютерний зір або зовнішні датчики, він менш схильний до помилок при зіткненні з невідомим середовищем або новими об'єктами. Це робить систему особливо надійною та універсальною.
Ширший дослідницький ландшафт тактильних датчиків у робототехніці
Фундаментальні проблеми та поточні рішення
Розробка роботів із відчуттям дотику ставить перед дослідниками фундаментальні виклики. Хоча людська тактильна система надзвичайно складна та багатогранна, штучні системи повинні відтворити її за допомогою технологічних засобів. Кен Голдберг, фахівець з робототехніки Каліфорнійського університету в Берклі, наголошує на складності цього завдання: «Людське відчуття дотику неймовірно багатогранне та складне, з широким динамічним діапазоном. Хоча роботи швидко прогресують, я був би здивований, якби побачив тактильні датчики на людському рівні в наступні п'ять-десять років».
Незважаючи на ці виклики, у дослідженнях досягається значний прогрес. Наприклад, Фраунгоферський міжнародний інститут розробляє тактильні сенсорні системи, які дозволяють реактивне захоплення, імітуючи людську руку, та ідеально підходять для обробки крихких або гнучких предметів. Дані датчиків використовуються для адаптації захоплення, розпізнавання компонентів та їх положення, а також для моніторингу процесів.
Інноваційні дослідницькі проекти в галузі тактильної робототехніки
Окрім розробок Amazon та MIT, існують інші важливі дослідницькі проекти в галузі тактильних датчиків для роботів:
Інститут інтелектуальних систем імені Макса Планка розробив тактильний датчик під назвою Insight, який виявляє дотик з високою чутливістю. Георг Марціус, керівник дослідницької групи в інституті, наголошує на продуктивності датчика: «Наш датчик демонструє видатну продуктивність завдяки інноваційній механічній конструкції корпусу, спеціально розробленій системі візуалізації всередині, автоматичному збору даних та найсучаснішим методам глибокого навчання». Датчик настільки чутливий, що навіть може відчувати власну орієнтацію відносно сили тяжіння.
Ще один цікавий проект – DensePhysNet, система, яка активно виконує послідовність динамічних взаємодій (наприклад, ковзання та зіткнення) та використовує глибоку прогностичну модель на основі своїх візуальних спостережень для вивчення щільних, піксельних представлень, що відображають фізичні властивості спостережуваних об'єктів. Експерименти як у симуляції, так і в реальних середовищах показують, що вивчені представлення містять багату фізичну інформацію та можуть бути використані безпосередньо для декодування властивостей фізичних об'єктів, таких як тертя та маса.
Пов'язано з цим:

Майбутні перспективи тактильних робототехнічних систем
Інтеграція мультимодальних сенсорних систем
Майбутнє тактильної робототехніки полягає в інтеграції різних сенсорних модальностей. Дослідники з Массачусетського технологічного інституту вже працюють над тим, щоб навчити штучний інтелект поєднувати такі почуття, як зір і дотик. Розуміючи, як ці різні сенсорні модальності взаємодіють, роботи можуть розвинути більш цілісне розуміння свого оточення.
Команда MIT вже планує поєднати свій метод виявлення об'єктів з комп'ютерним зором, щоб створити ще потужнішу мультимодальну сенсорну систему. «Ця робота не намагається замінити комп'ютерний зір. Обидва методи мають свої переваги та недоліки. Але тут ми показали, що вже можемо ідентифікувати деякі з цих властивостей навіть без камери», – пояснює Чен.
Розширені сфери застосування та майбутні розробки
Дослідники команди MIT також хочуть дослідити застосування зі складнішими роботизованими системами, такими як м'які роботи, та складнішими об'єктами, включаючи рідини, що розбризкуються, або гранульовані середовища, такі як пісок. У довгостроковій перспективі вони сподіваються використовувати цю техніку для покращення навчання роботів, що дозволить майбутнім роботам швидко розвивати нові навички маніпуляцій та адаптуватися до змін у навколишньому середовищі.
Amazon планує продовжувати розробку та впровадження технології Vulcan у більших масштабах у найближчі роки. Інтеграція Vulcan з існуючим парком компанії з 750 000 мобільних роботів передбачає комплексну концепцію автоматизації, яка може фундаментально змінити логістичну галузь.
Тактильне навчання: коли датчики надають роботам відчуття дотику
Розробка роботів із відчуттям дотику, прикладами яких є Vulcan від Amazon та система розпізнавання об'єктів MIT, знаменує собою вирішальний поворотний момент у робототехніці. Ці технології дозволяють роботам виконувати завдання, які раніше були виключно прерогативою людей, оскільки вони вимагають дрібної моторики та тактильного розуміння.
Різні підходи – зосередження Amazon на спеціалізованих датчиках та концепція MIT щодо використання існуючих датчиків для тактильного виведення – демонструють різноманітність напрямків досліджень у цій галузі. Обидва підходи мають свої специфічні сильні сторони та сфери застосування.
Зі зростанням інтеграції тактильних можливостей у роботизовані системи відкриваються нові можливості для автоматизації складних завдань у логістиці, виробництві, охороні здоров'я та багатьох інших галузях. Здатність роботів не лише бачити, а й «відчувати» своє оточення робить нас значним кроком ближче до майбутнього, в якому роботи та люди зможуть співпрацювати ще тісніше та інтуїтивніше.
Пов'язано з цим: