Тиха революція важких роботів у машинобудуванні: Чому штучний інтелект зараз є вирішальним фактором для найпотужніших роботів – Creative image Xpert.Digital
Потужніші, ніж будь-коли раніше – а тепер ще й розумніші: ось що справді можуть робити нові суперроботи
### Забудьте про заводський цех: ці роботи-гіганти тепер завойовують будівельні майданчики та вітрові електростанції ### Більше не потрібні клітки: як багатотонні роботи стають безпечними товаришами по команді для людей ### Відповідь на проблему дефіциту кваліфікованих працівників? Ці роботи виконують найскладніші роботи у світі ### Зіткнення титанів: не сила, а програмне забезпечення вирішує, хто створить найкращого робота ###
Еволюція сили: Найновіші розробки у високопродуктивних роботах важкої вантажопідйомності
Сектор важких роботів переживає глибоку трансформацію, яка виходить далеко за рамки простого збільшення корисного навантаження та радіусу дії. Останні розробки демонструють зміну парадигми в бік цілісного підходу, який надає пріоритет інтелекту, адаптивності, зручності використання та розробці нових застосувань. Програмне забезпечення, штучний інтелект (ШІ) та передова мехатроніка стали основними рушійними силами цінності, що дозволяє цим потужним машинам вирішувати складні завдання в динамічних середовищах, часто у безпосередній співпраці з людьми. Ключові тенденції включають зростаюче розмиття меж між традиційними промисловими роботами та колаборативними системами (коботами), розширення в такі сектори, як будівництво та відновлювана енергетика, а також зростаючу важливість загальної вартості володіння (TCO) та сталого розвитку. Ці розробки визначають наступне покоління важких роботів, які не тільки сильніші, але, що ще важливіше, розумніші, гнучкіші та доступніші.
Нове покоління надпотужних роботів: новий погляд на потужність і точність
Ринок роботів великої вантажопідйомності еволюціонує від чистої конкуренції за максимальне корисне навантаження до диверсифікованого ландшафту, де головне місце займають специфічні для конкретного застосування продуктивність та ефективність. Провідні виробники відрізняють свою продукцію поєднанням потужності, швидкості, компактності та інтелектуального дизайну.
Визначення сучасного класу важких вантажівок: більше, ніж просто потужність
Важкі роботи призначені для обробки вантажів, які зазвичай починаються від 250 кг та/або вимагають досяжності понад 4 метри. Вони складають основу таких галузей, як автомобілебудування, машинобудування, ливарне виробництво та все частіше будівництво, де вони переміщують масивні компоненти, такі як блоки двигунів, сталеві балки та цілі кузови автомобілів. Діапазон вантажопідйомності величезний, від кількох сотень кілограмів до поточного піку в 2300 кг.
Однак оцінка сучасних важких роботів зазнала змін. Хоча максимальне корисне навантаження залишається ключовим критерієм, все більше уваги приділяється цілісним показникам ефективності. До них належать співвідношення корисного навантаження до ваги, необхідна площа основання, споживання енергії та здатність точно та динамічно обробляти вантажі з високими моментами інерції. Ці критерії відображають глибше розуміння загальної вартості володіння та вимог сучасного, гнучкого виробничого середовища.
Конкурентне середовище та флагманські моделі (2024-2026)
На ринку домінують такі визнані гравці, як KUKA, Fanuc, ABB та Yaskawa, тоді як нові конкуренти, такі як Estun з Китаю, набувають дедалі більшого значення. Стратегії цих компаній демонструють разючу розбіжність, яка виходить за рамки простого максимізації вантажопідйомності.
Fanuc залишається беззаперечним лідером ринку в сегменті надважких робіт зі своєю серією M-2000iA. Модель M-2000iA/2300 з корисним навантаженням 2,3 тонни є найпотужнішим у світі 6-осьовим шарнірним роботом і ідеально підходить для завдань, що вимагають абсолютно максимальної міцності, таких як підйом цілих шасі транспортних засобів.
KUKA дотримується стратегії оптимізованої продуктивності. Хоча серія KR FORTEC ultra пропонує вантажопідйомність до 800 кг, вона характеризується винятково хорошим співвідношенням корисного навантаження до ваги та компактною конструкцією. Це досягається завдяки інноваційним конструктивним особливостям, таким як система подвійного важеля, яка підвищує жорсткість без надмірного збільшення ваги. Для палетування серія KR 1000 titan пропонує моделі з вантажопідйомністю до 1300 кг.
Компанія ABB позиціонує свій флагманський робот IRB 8700 як найшвидшого у своєму класі. З вантажопідйомністю до 800 кг (або 1000 кг з нахиленим зап'ястям), він, як кажуть, досягає циклу на 25% швидше, ніж аналогічні моделі. ABB також підкреслює його надійність завдяки спрощеній механічній конструкції з лише одним двигуном та коробкою передач на вісь, що зменшує витрати на технічне обслуговування та знижує загальну вартість володіння.
Yaskawa пропонує широкий асортимент, який включає Motoman MH600 з вантажопідйомністю 600 кг. Його конструкція з паралельними шарнірами забезпечує високу стабільність і жорсткість, що особливо вигідно під час обробки заготовок з високим моментом інерції. Серія GP розроблена для високошвидкісних застосувань.
На ринок також виходять нові конкуренти, такі як Estun та Kawasaki. Estun, найбільший виробник промислових роботів у Китаї, планує випустити в Європі такі моделі, як ER 13300 з корисним навантаженням 1000 кг. Kawasaki розширює свій портфель моделями MXP710L (710 кг) та серією M, які можуть обробляти до 1500 кг.
Ці різні підходи демонструють, що ринок надпотужних роботів еволюціонував від одномірної гонки за найбільше корисне навантаження до більш диференційованого конкурентного середовища. Виробники тепер конкурують на основі спеціалізованих характеристик продуктивності, адаптованих до конкретних вимог клієнтів – будь то максимальна сила, ефективність у обмеженому просторі чи максимальна швидкість. Це дозволяє користувачам вибирати рішення, оптимізоване для їхніх індивідуальних виробничих умов, а не просто вибирати найпотужнішу доступну модель.
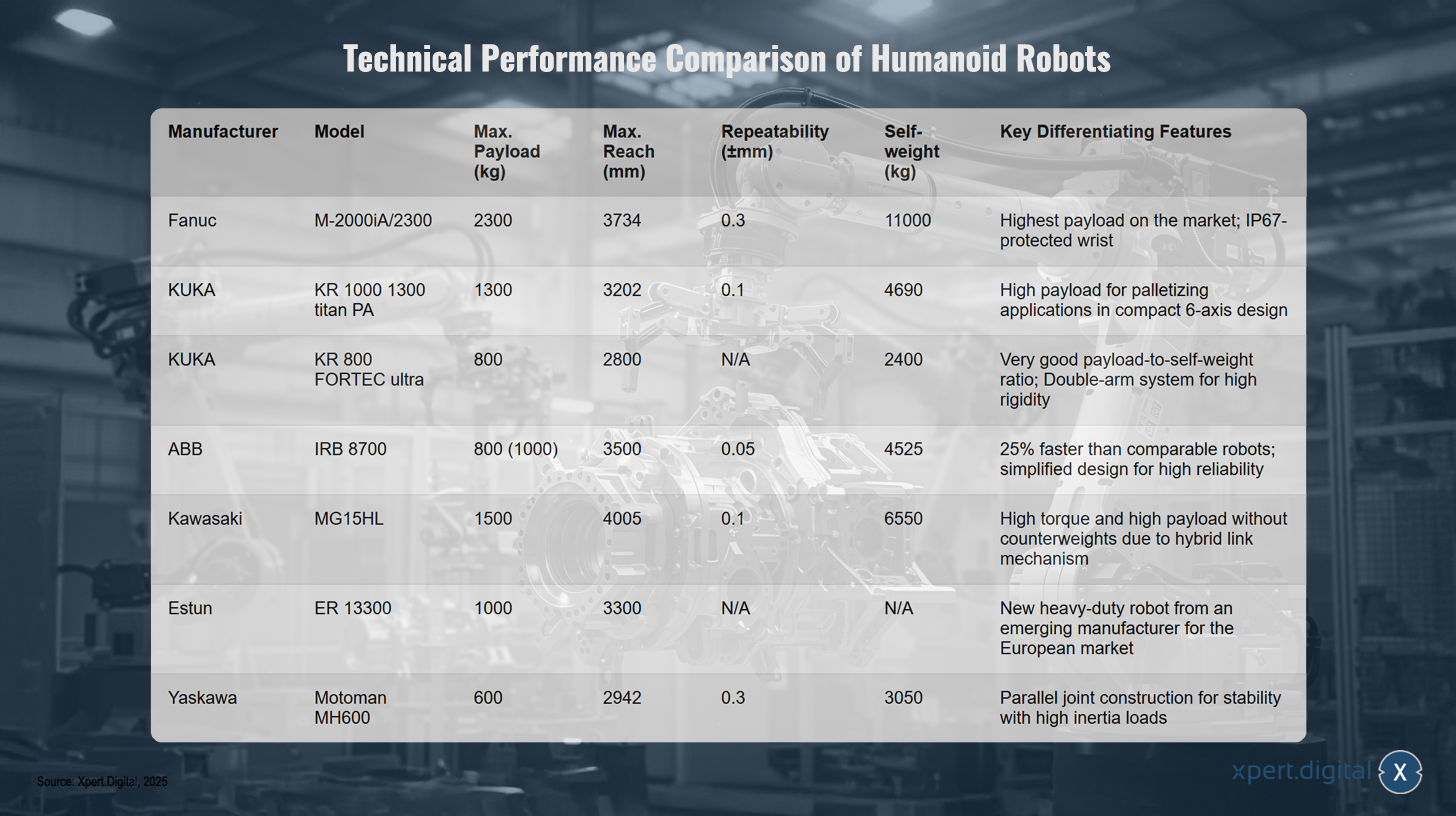
Роботи-гіганти: порівняння найпотужніших промислових роботів
Роботи-гіганти: порівняння найпотужніших промислових роботів – зображення: Xpert.Digital
У світі промислових роботів є кілька вражаючих гігантів, які виділяються завдяки своїй величезній вантажопідйомності та технічним характеристикам. Такі виробники, як Fanuc, KUKA, ABB, Kawasaki, Estun та Yaskawa, конкурують за лідируючі позиції в цьому сегменті ринку.
Fanuc M-2000iA/2300 вирізняється винятковою вантажопідйомністю 2300 кг, а також має зап'ястя із захистом IP67. KUKA представляє KR 1000 1300 titan PA, робота з вантажопідйомністю 1300 кг, ідеального для палетування та компактної 6-осьової конструкції. ABB IRB 8700 отримує бали завдяки на 25% вищій швидкості порівняно з аналогічними моделями та спрощеній конструкції для максимальної надійності.
Kawasaki MG15HL використовує гібридний механізм з'єднання, який забезпечує високий крутний момент і корисне навантаження без додаткових противаг. Yaskawa Motoman MH600 вражає своєю конструкцією паралельного з'єднання, яка гарантує стійкість під навантаженнями з високими моментами інерції.
Цікавим новачком є Estun ER 13300, надпотужний робот, який прагне підкорити європейський ринок. Ці роботи вражаюче демонструють технологічний прогрес у промисловій автоматизації та постійні інновації провідних виробників.
Інтелектуальний двигун: ШІ та програмне забезпечення як ключові відмінні риси
Найзначніші досягнення у розробці важких роботів вже не носять суто механічного характеру. Швидше, це поєднання робототехніки зі штучним інтелектом та передовим програмним забезпеченням, яке фундаментально розширює можливості цих машин та революціонізує їхню роботу.
Від автоматизації до автономії: вплив штучного інтелекту та машинного навчання
Штучний інтелект та машинне навчання (МН) перетворюють промислових роботів з жорстких, попередньо запрограмованих інструментів на адаптивні, інтелектуальні системи, здатні сприймати, приймати рішення та навчатися. Ця трансформація має вирішальне значення для управління мінливістю та складністю в сучасних виробничих та логістичних процесах.
Розширене сприйняття («очі»)
Сучасні роботи більше не працюють наосліп. Вони оснащені високотехнологічними сенсорними системами, включаючи системи 2D та 3D зору, LiDAR та стереокамери, які дають їм повне розуміння навколишнього середовища. Ця перцептивна здатність зумовлена алгоритмами глибокого навчання для розпізнавання, локалізації та сегментації об'єктів, що робить можливим їх використання в неструктурованих середовищах.
Приклад використання – Комплектування з контейнерів: Системи, такі як KUKA.SmartBinPicking, використовують розширену обробку зображень для ідентифікації випадково розташованих об’єктів у контейнері, визначення точок їх захоплення та безпечного видалення – завдання, яке практично неможливо виконати за допомогою традиційного програмування на основі правил.
Приклад використання – Виявлення на будівельному майданчику: Дослідження активно розробляють моделі розпізнавання об'єктів на основі YOLO (You Only Look Once – Ви дивитесь лише раз). Вони дозволяють роботам ідентифікувати робітників, транспортні засоби та будівельні конструкції на динамічних будівельних майданчиках, що є фундаментальною вимогою для автономної роботи в таких складних середовищах.
Інтелектуальне виконання завдань («мозок»)
Штучний інтелект служить не лише для бачення, а й для дії. Моделі машинного навчання дозволяють роботам адаптувати свої дії до змінних умов у режимі реального часу.
Приклад використання – депалетизація за допомогою штучного інтелекту: FANUC використовує системи машинного зору, керовані штучним інтелектом, щоб дозволити роботам автономно розвантажувати змішані палети з різними розмірами та положеннями коробок. Такі системи можуть обробляти понад дев'ять коробок за хвилину, замінюючи таким чином надзвичайно виснажливу ручну працю.
Приклад використання – Зварювання за допомогою штучного інтелекту: Системи наступного покоління, такі як NovAI™, використовують машинний зір та штучний інтелект для адаптивного зварювання в режимі реального часу. Вони можуть відстежувати зварні шви, адаптуватися до розмірів зазорів та прихоплювальних зварних швів, а також динамічно коригувати параметри зварювання. Це автоматизує процеси, які раніше вважалися занадто непослідовними для робототехніки через допуски компонентів, і є значним прогресом у важкому будівництві в таких галузях, як суднобудування.
Революція у зручності використання: спрощення складних процесів за допомогою передового програмного забезпечення
Традиційно програмування промислових роботів було вузькоспеціалізованим завданням, що вимагало глибоких знань власних мов програмування, таких як KRL (KUKA) або RAPID (ABB). Це створювало високий бар'єр для входу та уповільнювало впровадження рішень з автоматизації.
Операційні системи наступного покоління
Провідні виробники реагують на це вузьке місце, розробляючи нові, інтуїтивно зрозумілі операційні системи, призначені для демократизації роботизації.
KUKA iiQKA.OS: Сучасна операційна система на базі Linux з веб-інтерфейсом користувача (iiQKA.UI), розроблена для того, щоб бути такою ж простою у використанні, як і смартфон. Вона підтримує програмування на основі інструкцій, дозволяє віртуальне введення в експлуатацію та розроблена для сприяння розвитку цілої екосистеми сторонніх програм та обладнання («Роботизована Республіка»).
FANUC iHMI: «Інтелектуальний інтерфейс людини-машини» – це графічний інтерфейс користувача на основі сенсорного екрана, розроблений для значного скорочення часу налаштування та навчання. Він об’єднує інструменти планування, редагування та вдосконалення, такі як оцінка часу циклу та управління технічним обслуговуванням, в єдиний зручний інтерфейс.
Демократизація програмування
Тенденція явно рухається до взаємодії без коду або з низьким використанням коду. Візуальні середовища програмування з функцією перетягування та графічними редакторами робочих процесів стають стандартом. Методи «навчання шляхом демонстрації», коли оператор вручну керує роботом через рух (ручне керування) або використовує зовнішні інструменти, такі як Wandelbots Tracepen, для «демонстрації» завдання роботу, ще більше знижують бар'єр програмування.
Сила симуляції (цифрові двійники)
Програмне забезпечення для офлайн-програмування та моделювання, таке як KUKA.Sim або ABB RobotStudio, стало незамінним інструментом. Воно дозволяє компаніям віртуально проектувати, тестувати та оптимізувати цілі роботизовані комірки ще до замовлення фізичного обладнання. Таке «віртуальне введення в експлуатацію» значно скорочує фактичний час налаштування, мінімізує ризики завдяки ранньому виявленню зіткнень або проблем з доступністю, а також дозволяє виконувати програмування паралельно із закупівлею обладнання.
Ці розробки вказують на фундаментальний зсув у робототехніці. Виробники більше не просто продають маніпулятор робота з контролером, а створюють цілі цифрові платформи. Ці платформи включають операційні системи, магазини додатків, партнерські мережі та хмарне підключення. KUKA активно просуває партнерську екосистему («Robotic Republic») для iiQKA з відкритими інтерфейсами для сторонніх постачальників. Водночас, такі платформи, як ctrlX AUTOMATION від Bosch Rexroth, дозволяють керувати роботами різних брендів (ABB, KUKA, FANUC) через єдиний інтерфейс. Цей розвиток відображає трансформацію на ринку смартфонів, де цінність пристрою значною мірою визначається його екосистемою додатків. Таким чином, конкурентний ландшафт зміщується від суто апаратних специфікацій до сили та відкритості програмної екосистеми. Для користувачів це означає меншу залежність від одного виробника, швидші інновації та доступ до ширшого спектру спеціалізованих рішень. Робот стає апаратною платформою, на якій будується програмно-визначене рішення для автоматизації.
🎯🎯🎯 Скористайтеся перевагами великого, п'ятикратного досвіду Xpert.Digital в одному комплексному пакеті послуг | Розробка бізнес-аналітики, дослідження та розробки, XR, зв'язки з громадськістю та оптимізація цифрової видимості


Скористайтеся перевагами великого, п'ятикратного досвіду Xpert.Digital у комплексному пакеті послуг | Дослідження та розробки, XR, PR та оптимізація цифрової видимості - Зображення: Xpert.Digital
Xpert.Digital має глибокі знання в різних галузях. Це дозволяє нам розробляти індивідуальні стратегії, точно узгоджені з вимогами та викликами вашого конкретного сегмента ринку. Завдяки постійному аналізу ринкових тенденцій та моніторингу розвитку галузі ми можемо діяти проактивно та пропонувати інноваційні рішення. Поєднання досвіду та знань створює додаткову цінність та надає нашим клієнтам вирішальну конкурентну перевагу.
Більше інформації тут:
Нова мехатроніка: Як надпотужні роботи порушують фізичні межі
Передова мехатроніка: фізична еволюція влади
Поряд зі стрімким розвитком програмного забезпечення та штучного інтелекту, фізична форма надпотужних роботів також розвивається. Інновації в дизайні, матеріалознавстві та технології кінцевих виконавчих механізмів мають вирішальне значення для перетворення цього підвищеного інтелекту на механічні характеристики.
Інновації в дизайні та матеріалах: Більша продуктивність за меншої маси
Ключовою тенденцією є розробка роботів, які є легшими та компактнішими, але пропонують таку ж або навіть більшу вантажопідйомність. Наприклад, KUKA KR Fortec до 700 кг легший за свого попередника, тоді як серія KR FORTEC ultra може похвалитися провідним у своєму класі співвідношенням корисного навантаження до ваги. Таке зниження ваги знижує вимоги до фундаменту, зменшує споживання енергії та дозволяє розгортати їх у щільно заселених та просторово обмежених виробничих приміщеннях.
Це стало можливим завдяки передовим кінематичним концепціям. Дворучна система KUKA та наджорсткі конструкції важелів Fanuc покращують точність та зменшують вібрації на високих швидкостях та при великих навантаженнях. Гібридний механізм з'єднання Kawasaki усуває потребу в громіздких противагах, тим самим збільшуючи робочий простір робота.
Ще одним важливим аспектом є модульність. Серії роботів, такі як від KUKA (KR Quantec, Fortec, Fortec ultra), все частіше використовують спільні компоненти, такі як центральні стрілки. Це спрощує технічне обслуговування та зменшує витрати на запасні частини для клієнтів, які експлуатують диверсифікований парк роботів.
Для використання в екстремальних умовах зараз стандартними є спеціалізовані варіанти, такі як версії «Ливарне» або «Гігієнічне». Ці моделі мають зап'ястя та корпус із захистом IP67, термостійкі та корозійностійкі покриття, а також харчові мастила, що дозволяє використовувати їх у ливарних цехах, кузнях або на харчових заводах.
Кінцеві ефектори наступного покоління: руки робота
Захвати на кінці маніпулятора робота, відомі як кінцеві ефектори, еволюціонують від простих пневматичних затискачів до складних мехатронних систем. Вони все частіше оснащуються вдосконаленими датчиками, що забезпечують адаптивну функціональність. Хоча вони все ще переважно використовуються в застосуваннях з меншим корисним навантаженням, принципи м'якої робототехніки та біоніки впливають на технологію захоплень. Мета полягає в тому, щоб обробляти більшу різноманітність форм об'єктів та матеріалів з вищою надійністю та меншими зусиллями. Для важких та складних об'єктів розробляються багатоосьові, повністю приводні механізми, які забезпечують точне маніпулювання.
Датчики сили та крутного моменту, встановлені на зап'ястках, надають роботу «відчуття дотику». Вони дозволяють йому виконувати делікатні завдання, такі як точне з'єднання компонентів, застосування певної сили під час шліфування або безпечне реагування на несподівані зіткнення.
Сенсорна екосистема: основа сприйняття та безпеки
Сучасні надпотужні роботи залежать від багатої екосистеми внутрішніх та зовнішніх датчиків. Внутрішні датчики, такі як енкодери двигунів та датчики крутного моменту в шарнірах, є важливими для точного керування рухом. Зовнішні датчики, такі як 3D-камери, LiDAR та ультразвукові датчики, надають дані для сприйняття навколишнього середовища та забезпечують безпечну співпрацю людини та робота. Інтегровані системи захисту від зіткнень та перевантаження можуть ініціювати аварійну зупинку у разі зіткнення або надмірного навантаження, таким чином захищаючи як робота, так і заготовку. Ці системи стають дедалі складнішими та тепер пропонують такі функції, як пневматично регульовані пороги спрацьовування.
Сталий розвиток та ефективність: акцент на загальній вартості володіння (TCO)
Енергоефективність стала ключовою метою проектування. Завдяки легкій конструкції, програмно-оптимізованим траєкторіям руху та енергозберігаючим режимам очікування виробники зменшують споживання енергії своїми роботами. Це не тільки знижує експлуатаційні витрати, але й покращує екологічний вплив автоматизованого рішення. Спрощені механічні конструкції, такі як ті, що використовуються ABB, з лише одним двигуном на вісь, та модульна конструкція призводять до вищої надійності (середній час напрацювання між відмовами, MTBF) та швидшого ремонту (середній час на ремонт, MTTR), що ще більше знижує загальні експлуатаційні витрати.
Досягнення в мехатроніці тісно пов'язані з розвитком програмного забезпечення та штучного інтелекту. Жорсткіша, менш схильна до вібрації структура руки (вдосконалення апаратного забезпечення) є необхідною умовою для вдосконаленого програмного забезпечення для керування рухом (вдосконалення програмного забезпечення), яке дозволить роботу рухатися швидше та точніше. Алгоритми планування шляху на основі штучного інтелекту можуть потім розрахувати найбільш енергоефективну траєкторію саме для цієї кінематики. Інтегровані датчики сили-крутного моменту, у свою чергу, забезпечують зворотний зв'язок у режимі реального часу, дозволяючи програмному забезпеченню керування реагувати на непередбачені сили та робити процес більш надійним. Таким чином, продуктивність сучасного важкого робота є емерджентною властивістю всієї системи, в якій механіка, датчики та програмне забезпечення нерозривно пов'язані.
Розширені горизонти: Нові сфери застосування надміцної робототехніки
Технологічний прогрес у сфері штучного інтелекту, програмного забезпечення та мехатроніки дозволяє використовувати надпотужних роботів у галузях промисловості, які раніше покладалися на ручну працю або жорстку автоматизацію. Роботи залишають контрольовані заводські цехи та підкорюють динамічні та неструктуровані середовища.
Автоматизований будівельний майданчик
Будівельна галузь стикається з величезними викликами через нестачу кваліфікованих працівників, високі ризики для безпеки та зростаючий тиск на продуктивність. Як наслідок, 81% будівельних компаній планують впровадити роботів протягом наступних десяти років.
Застосування: Надпотужні роботи обробляють масивні компоненти, такі як сталеві профілі, збірні залізобетонні елементи та модульні корпуси. Вони використовуються для автоматизованого виробництва, наприклад, для свердління, заклепування та кріплення великих компонентів. Конкретним прикладом є Fischer BauBot, який був розроблений спеціально для свердлильних та анкерних робіт на великих будівельних майданчиках. Роботи також можуть бути оснащені ріжучими інструментами для обробки бетонних та сталевих компонентів на місці з високою точністю.
Ключові технології: Успіх у цьому неструктурованому середовищі критично залежить від розпізнавання об'єктів на основі штучного інтелекту для ідентифікації матеріалів та перешкод, а також від надійних мобільних платформ.
Енергетика майбутнього: Автоматизація виробництва відновлюваних джерел енергії
Масове розширення відновлюваних джерел енергії вимагає швидшого та економічно ефективнішого виробництва та встановлення великих компонентів, таких як лопаті вітрових турбін та сонячних електростанцій.
Вітрова енергія: У виробництві лопатей вітрових турбін роботи використовуються для подальшої обробки (обрізки, шліфування, заповнення), що покращує якість і звільняє працівників від небезпечних завдань. В автоматизованому розміщенні волокон (AFP) роботизовані маніпулятори точно укладають смуги з вуглецевого волокна або скловолокна для створення легших і міцніших лопатей ротора. Спеціальні роботизовані системи обробляють корінь лопаті (пиляння, фрезерування, свердління) і скорочують час циклу до 50% порівняно зі звичайними машинами.
Сонячна енергія: Такі компанії, як Charge Robotics та Terabase, розробляють мобільні «фабрики», які автоматично попередньо збирають та встановлюють цілі секції сонячних модулів безпосередньо на будівельних майданчиках сонячних електростанцій, що потенційно може подвоїти продуктивність. Робот «Maximo» від AES використовує штучний інтелект, LiDAR та машинний зір для автоматизації важкого підйому та складання сонячних панелей, скорочуючи час та витрати до 50%. Система Hyperflex від Comau — це мобільна фабрика, розміщена в напівпричепі, яка збирає та встановлює сонячні трекери безпосередньо в польових умовах.
Модернізація важкої промисловості: суднобудування та аерокосмічна галузь
Суднобудування: Ця традиційно низькоавтоматизована галузь починає використовувати мобільних надпотужних роботів. MR4Weld, розроблений Comau у співпраці з верф'ю Fincantieri, — це автономний мобільний зварювальний робот, здатний пересуватися неструктурованим середовищем верфі для виконання зварювальних робіт на великих секціях корпусу. Це забезпечує нову гнучкість та ефективність у складанні масивних сталевих конструкцій.
Аерокосмічна галузь: тут високоточні надпотужні роботи використовуються для свердління, заклепування та з'єднання великих компонентів літаків, таких як крила та деталі фюзеляжу, де потрібна найвища точність та повторюваність.
Замикання циклу: роль у циркулярній економіці
Цілі сталого розвитку та нормативні акти ЄС зумовлюють потребу в ефективній переробці та повторній обробці складних продуктів.
Автоматизований демонтаж: Надпотужні роботи ідеально підходять для демонтажу великих і важких виробів.
Акумулятори для електромобілів: Через їхню велику вагу та потенційні небезпеки (електричні, хімічні), роботизований демонтаж акумуляторів для електромобілів є вирішальним фактором для безпечної та економічної переробки. Дослідницькі проекти розробляють роботизовані комірки, які автоматично розділяють модулі акумуляторів та елементи.
Велика електроніка та двигуни: Інститут Фраунгофера працює над роботизованими системами, які використовують штучний інтелект та машинний зір для автоматичного розбирання ПК, пральних машин та електродвигунів з метою видобутку цінних матеріалів, таких як мідь та рідкоземельні магніти. Це важливий крок до створення «міського видобутку корисних копалин».
Ці нові сфери застосування мають спільну рису: вони переносять робота з високоструктурованого, передбачуваного середовища заводського цеху до динамічного, неструктурованого та часто суворого «поля». Ця зміна середовища є основною рушійною силою технологічного розвитку в галузі штучного інтелекту, сенсорних технологій та мехатроніки. Технічний виклик зміщується з оптимізації повторюваних рухів на управління невизначеністю. Майбутній успіх залежатиме менше від поступового покращення швидкості чи точності та більше від проривів у сприйнятті навколишнього середовища, автономній навігації та адаптивному плануванні завдань.
Наша рекомендація: 🌍 Безмежний охоплення 🔗 Зв'язок 🌐 Багатомовність 💪 Сила продажів: 💡 Автентичність зі стратегією 🚀 Інновації зустрічаються 🧠 Інтуїція


Від локального до глобального: малі та середні підприємства завойовують світовий ринок за допомогою розумної стратегії - Зображення: Xpert.Digital
В епоху, коли цифрова присутність компанії визначає її успіх, завдання полягає у створенні автентичної, персоналізованої та широкомасштабної присутності. Xpert.Digital пропонує інноваційне рішення, яке позиціонує себе як поєднання галузевого центру, блогу та амбасадора бренду. Воно поєднує переваги комунікаційних та збутових каналів на єдиній платформі та дозволяє публікувати матеріали 18 різними мовами. Співпраця з партнерськими порталами та можливість публікації статей у Google News та списку розсилки преси, який налічує приблизно 8000 журналістів та читачів, максимізує охоплення та видимість контенту. Це є вирішальним фактором у зовнішніх продажах та маркетингу (SMarketing).
Більше інформації тут:
Зростання, можливості, перешкоди: Стратегії для важкої робототехніки
Спільний фронтир: безпечна взаємодія людини та робота з високим корисним навантаженням
Нова, здавалося б, суперечлива тенденція — це застосування принципів колаборації до роботів, здатних застосовувати потенційно смертельні сили. Цей розвиток перетворює надпотужних роботів з ізольованих машин на потужних членів команди.
За межами клітки: Спектр співпраці
Традиційна концепція безпеки експлуатації важких роботів у захисних корпусах є неефективною та створює жорсткий розмежування між завданнями людини та машини. Сучасна співпраця людини і робота (HRC) однак не є єдиною концепцією, а спектром, що охоплює як просто співіснування (робот зупиняється, коли людина входить у його робочу зону) так і тісну співпрацю (людина та робот працюють одночасно над однією й тією ж заготовкою).
Ключова перевага цього підходу полягає в тому, що, на відміну від традиційних легких коботів, колаборативні промислові роботи не мають обмежень щодо корисного навантаження, швидкості чи точності. Таким чином, вони пропонують найкраще з обох світів: продуктивність промислового робота та гнучкість колаборативного застосування.
Ключові технології для безпечного важкого MRK
Безпечна співпраця людини та робота з важкими роботами стала можливою завдяки поєднанню передових датчиків та інтелектуальних функцій керування.
Удосконалені датчики безпеки: Основою безпечної співпраці людини та робота (HRC) є здатність системи виявляти присутність та наміри людини. Це досягається за допомогою сертифікованих за безпекою лазерних сканерів, 3D-камер і навіть чутливих до тиску підлог, які створюють динамічні багатошарові захисні поля навколо робота.
Моніторинг швидкості та дистанції (SSM): це ключовий метод співпраці, де швидкість робота обернено пропорційна його відстані від людини. Коли людина наближається, робот сповільнюється. Якщо людина підходить занадто близько, робот безпечно зупиняється під наглядом. Це забезпечує плавну та ефективну взаємодію без фізичних бар'єрів.
Обмеження потужності та сили (PFL): Хоча це складно через високу інерцію важких роботів, вдосконалені системи керування та датчики крутного моменту в кожному з'єднанні дозволяють навіть великим роботам працювати в режимі обмеження сили для виконання певних завдань. Вони негайно зупиняються при неочікуваному контакті. Ця функція часто використовується для ручного керування або завдань переміщення.
Стандартизація та оцінка ризиків: Впровадження безпечних програм для співпраці людини та робота (HRC) регулюється такими стандартами, як EN ISO 10218 та технічною специфікацією ISO/TS 15066. Фундаментальною вимогою завжди є ретельна оцінка ризиків усієї програми, тобто робота, захоплення, заготовки та навколишнього середовища. Навіть робот, який є безпечним за своєю суттю, може працювати з небезпечним інструментом.
Ці розробки призводять до переосмислення терміна «кобот». Традиційно цей термін був синонімом невеликих, легких та безпечних за своєю суттю робототехнічних маніпуляторів. Інтеграція колаборативної функціональності у важкі промислові роботи порушує цю парадигму. «Колаборативний» еволюціонує від іменника (тип робота, «кобот») до прикметника або набору функцій («застосування колаборативного робота»). Майбутнє полягає не в бінарному виборі між «коботом» та «промисловим роботом», а у виборі промислового робота з відповідним корисним навантаженням та продуктивністю, який потім оснащений функціями колаборативної безпеки, необхідними для конкретного застосування. Це значно розширює потенціал співпраці людини і робота (HRC) до сфер, раніше недоступних для тісної співпраці людини і машини, таких як складання важких робіт або логістика.
RaaS пояснює: Як компанії можуть знизити бар'єр входу для роботів
Ринок надпотужних роботів готовий до сталого зростання, зумовленого технологічними інноваціями та розширенням у нові сектори. Однак успішне впровадження вимагає від компаній прийняття стратегічних рішень, які виходять за рамки простої оцінки технологій.
Прогнози щодо розміру та зростання ринку
Глобальний ринок промислової робототехніки є значним і зростаючим сектором. Прогнози розміру ринку варіюються залежно від обсягу та методології аналізу, але постійно демонструють позитивну тенденцію
- Згідно з аналізом, зростання зросте з 33,9 млрд доларів США у 2024 році до 60,5 млрд доларів США до 2030 року, що відповідає складному річному темпу зростання (CAGR) на рівні 9,9%.
- В іншому дослідженні очікується зростання з 16,9 млрд доларів США (2024) до 29,4 млрд доларів США до 2029 року (середньорічнозростальний темп зростання 11,7%).
- Третій прогноз передбачає зростання з 19,9 млрд доларів США (2024) до 55,5 млрд доларів США до 2032 року (середньорічнозростальний темп зростання 14,2%).
Конкретний ринок «Надпотужних робототехнічних платформ» оцінювався в 333,5 млн доларів США на 2024 рік, з прогнозом у 446,0 млн доларів США до 2030 року (CAGR 5,0%). Розбіжність із загальними показниками свідчить про те, що надпотужні роботи представляють собою ціннісно-інтенсивний, але менший за середній сегмент загального ринку.
За даними Міжнародної федерації робототехніки (IFR), світовий експлуатаційний запас промислових роботів досяг рекордного рівня в 4,28 мільйона одиниць у 2023 році, що на 10% більше, ніж у попередньому році. Хоча у 2024 році відбулося тимчасове скорочення ринку, очікується, що довгострокова тенденція до зростання відновиться з 2025 року. Азія, зокрема Китай, залишається найбільшим і найшвидше зростаючим ринком, на який припадає 70% нових установок.
Ключові рушійні сили та перешкоди зростання
Рушійні сили зростання:
- Дефіцит кваліфікованих кадрів та демографічні зміни: у багатьох промислово розвинених країнах брак кваліфікованих працівників призводить до автоматизації фізично вимогливих та повторюваних завдань.
- Промисловість 4.0 та розумне виробництво: мережеве об'єднання та цифровізація виробництва вимагають інтелектуальних та гнучких роботів як центральних компонентів.
- Розвиток нових секторів: Зростання дедалі більше зумовлене впровадженням технологій у галузі за межами автомобільного сектору, такі як логістика, будівництво та відновлювані джерела енергії.
- Сталий розвиток та повернення на ринки: роботи підвищують ефективність використання матеріалів, зменшують відходи та забезпечують економічно ефективне виробництво у власній країні.
Перешкоди:
- Високі початкові інвестиції: витрати на робота, його інтеграцію та необхідну периферію становлять значну перешкоду, особливо для малих та середніх підприємств (МСП).
- Складність інтеграції: Незважаючи на більш зручні інтерфейси, інтеграція роботів у існуючі застарілі системи та забезпечення їхньої сумісності може залишатися проблемою.
Стратегічні імперативи для впровадження
Для компаній, які розглядають використання надпотужних роботів, вирішальним є наступні стратегічні міркування:
- Зміщення фокусу з капітальних витрат (Capex) на сукупну вартість володіння (TCO) та рентабельність інвестицій (ROI): Інвестиційні рішення не повинні ґрунтуватися виключно на ціні покупки. Цілісний аналіз загальної вартості володіння (TCO), включаючи споживання енергії, обслуговування та доступність, а також рентабельність інвестицій (ROI), зумовлену вищою пропускною здатністю, покращеною якістю та зниженням витрат на оплату праці, є надзвичайно важливим.
- Використання нових бізнес-моделей: такі моделі, як «Робототехніка як послуга» (RaaS), знижують початковий інвестиційний бар'єр, дозволяючи компаніям орендувати робототехнічні потужності як операційні витрати, а не робити капітальні інвестиції.
- Інвестування в розвиток персоналу: спрощення програмування не усуває потреби в кваліфікованих працівниках. Швидше, воно переносить необхідні навички з чистого програмування коду на завдання вищого рівня, такі як оптимізація процесів, моніторинг систем та обслуговування. Компанії повинні інвестувати в подальше навчання своїх працівників для ефективного управління та співпраці з цими інтелектуальними машинами.
- Пріоритетність програмного забезпечення та екосистем: Під час вибору робота ключовими критеріями мають бути програмна платформа виробника, простота його використання та широта партнерської екосистеми. Сильна екосистема забезпечує доступ до попередньо інтегрованих рішень та гарантує майбутнє інвестицій від змінних вимог.
Ми тут для вас - Консалтинг - Планування - Впровадження - Управління проектами
☑️ Підтримка МСП у стратегії, консалтингу, плануванні та впровадженні
☑️ Створення або переорієнтація цифрової стратегії та діджиталізації
☑️ Розширення та оптимізація процесів міжнародних продажів
☑️ Глобальні та цифрові торгові платформи B2B
☑️ Розвиток бізнесу Pioneer

Konrad Wolfenstein
Я буду радий служити вашим особистим консультантом.
Ви можете зв'язатися зі мною, заповнивши контактну форму нижче, або просто зателефонувавши мені за номером +49 7348 4088 965 .
Я з нетерпінням чекаю нашого спільного проєкту.
Напиши мені



Xpert.Digital - Konrad Wolfenstein
Xpert.Digital – це галузевий центр, що спеціалізується на цифровізації, машинобудуванні, логістиці/інтралогістиці та фотоелектричній енергетиці.
Завдяки нашому комплексному рішенню для розвитку бізнесу на 360° ми підтримуємо відомі компанії, починаючи від нового бізнесу і закінчуючи післяпродажним обслуговуванням.
Ринкова аналітика, маркетинг, автоматизація маркетингу, розробка контенту, PR, поштові кампанії, персоналізовані соціальні мережі та підтримка лідів – це частина наших цифрових інструментів.
Більше інформації можна знайти за адресами: www.xpert.digital - www.xpert.solar - www.xpert.plus
Залишайтеся на зв'язку