Den tysta revolutionen av tunga robotar inom maskinteknik: Varför AI nu är den avgörande faktorn för de kraftfullaste robotarna – Creative image Xpert.Digital
Kraftfullare än någonsin tidigare – och nu också smart: Det här är vad de nya superrobotarna verkligen kan göra
### Glöm fabriksgolvet: Dessa robotjättar erövrar nu byggarbetsplatser och vindkraftsparker ### Inga fler burar behövs: Hur flertonsrobotar blir säkra lagkamrater för människor ### Svaret på bristen på yrkesarbetare? Dessa robotar tar över världens tuffaste jobb ### Titanernas sammandrabbning: Inte styrka, utan programvara avgör vem som bygger den bästa roboten ###
Styrkans utveckling: Senaste utvecklingen inom högpresterande tunga robotar
Sektorn för tunga robotar genomgår en djupgående omvandling som sträcker sig långt bortom att bara öka nyttolast och räckvidd. Den senaste utvecklingen visar ett paradigmskifte mot en helhetssyn som prioriterar intelligens, anpassningsförmåga, användarvänlighet och utveckling av nya applikationer. Programvara, artificiell intelligens (AI) och avancerad mekatronik har blivit de främsta värdedrivarna, vilket gör det möjligt för dessa kraftfulla maskiner att hantera komplexa uppgifter i dynamiska miljöer, ofta i direkt samarbete med mänskliga arbetare. Viktiga trender inkluderar den ökande suddiga gränserna mellan traditionella industrirobotar och samarbetande system (cobotar), expansion till sektorer som bygg och förnybar energi, samt den växande betydelsen av total ägandekostnad (TCO) och hållbarhet. Denna utveckling definierar nästa generation av tunga robotar, som inte bara är starkare utan, ännu viktigare, smartare, mer flexibla och mer tillgängliga.
Den nya generationen tunga robotar: Omdefinierar kraft och precision
Marknaden för tunga robotar utvecklas från en ren konkurrens om maximal nyttolast till ett diversifierat landskap där applikationsspecifik prestanda och effektivitet står i centrum. Ledande tillverkare differentierar sina produkter genom en kombination av kraft, hastighet, kompakthet och intelligent design.
Definition av den moderna tunglastklassen: Mer än bara rå kraft
Tunga robotar är konstruerade för att hantera laster som vanligtvis börjar på 250 kg och/eller kräver en räckvidd på över 4 meter. De utgör ryggraden i industrier som fordonstillverkning, maskinteknik, gjuterier och i allt högre grad även byggbranschen, där de flyttar massiva komponenter som motorblock, stålbalkar och hela fordonskarosser. Utbudet av nyttolastkapaciteter är enormt och sträcker sig från flera hundra kilogram till den nuvarande toppen på 2 300 kg.
Utvärderingen av moderna tunga robotar har dock utvecklats. Medan maximal nyttolast fortfarande är ett viktigt kriterium, kommer holistiska effektivitetsmått i allt högre grad i fokus. Dessa inkluderar nyttolast-vikt-förhållandet, erforderligt fotavtryck, energiförbrukning och förmågan att hantera laster med höga tröghetsmoment exakt och dynamiskt. Dessa kriterier återspeglar en djupare förståelse av den totala ägandekostnaden och kraven i moderna, flexibla produktionsmiljöer.
Konkurrenslandskap och flaggskeppsmodeller (2024-2026)
Marknaden domineras av etablerade aktörer som KUKA, Fanuc, ABB och Yaskawa, medan nya konkurrenter som Estun från Kina får allt större betydelse. Strategierna hos dessa företag visar en anmärkningsvärd skillnad som går utöver att bara maximera nyttolastkapaciteten.
Fanuc är fortfarande den obestridda marknadsledaren inom segmentet för ultratunga fordon med sin M-2000iA-serie. M-2000iA/2300-modellen, med en nyttolastkapacitet på 2,3 ton, är världens kraftfullaste 6-axliga ledade robot och är idealisk för uppgifter som kräver absolut maximal styrka, såsom att lyfta kompletta fordonschassin.
KUKA strävar efter en strategi för optimerad prestanda. Medan KR FORTEC ultra-serien erbjuder lyftkapaciteter på upp till 800 kg, kännetecknas den av ett exceptionellt bra nyttolast-/viktförhållande och en kompakt design. Detta uppnås genom innovativa designfunktioner som ett dubbelarmssystem, vilket ökar styvheten utan att öka vikten i onödan. För palleteringsapplikationer erbjuder KR 1000 titan-serien modeller med lyftkapaciteter på upp till 1 300 kg.
ABB positionerar sitt flaggskepp IRB 8700 som den snabbaste roboten i sin klass. Med en nyttolastkapacitet på upp till 800 kg (eller 1 000 kg med en vinklad handled) sägs den uppnå cykeltider som är 25 % snabbare än jämförbara modeller. ABB betonar också dess tillförlitlighet genom en förenklad mekanisk design med endast en motor och växellåda per axel, vilket minskar underhållet och sänker den totala ägandekostnaden.
Yaskawa erbjuder en bred portfölj som inkluderar Motoman MH600 med en nyttolastkapacitet på 600 kg. Dess parallella ledkonstruktion säkerställer hög stabilitet och styvhet, vilket är särskilt fördelaktigt vid hantering av arbetsstycken med högt tröghetsmoment. GP-serien är konstruerad för höghastighetsapplikationer.
Även framväxande konkurrenter som Estun och Kawasaki ger sig in på marknaden. Estun, Kinas största tillverkare av industrirobotar, planerar att lansera modeller som ER 13300 med en nyttolast på 1 000 kg i Europa. Kawasaki utökar sin portfölj med MXP710L (710 kg) och M-serien, som klarar upp till 1 500 kg.
Dessa olika tillvägagångssätt visar att marknaden för tunga robotar har utvecklats från en endimensionell kapplöpning om högsta nyttolast till ett mer differentierat konkurrenslandskap. Tillverkare konkurrerar nu baserat på specialiserade prestandaegenskaper skräddarsydda för specifika kundkrav – vare sig det gäller maximal kraft, effektivitet i trånga utrymmen eller maximal hastighet. Detta gör det möjligt för användare att välja en lösning optimerad för deras individuella produktionsförhållanden, snarare än att helt enkelt välja den mest kraftfulla modellen som finns tillgänglig.
Robotjättar: En jämförelse av de kraftfullaste industrirobotarna
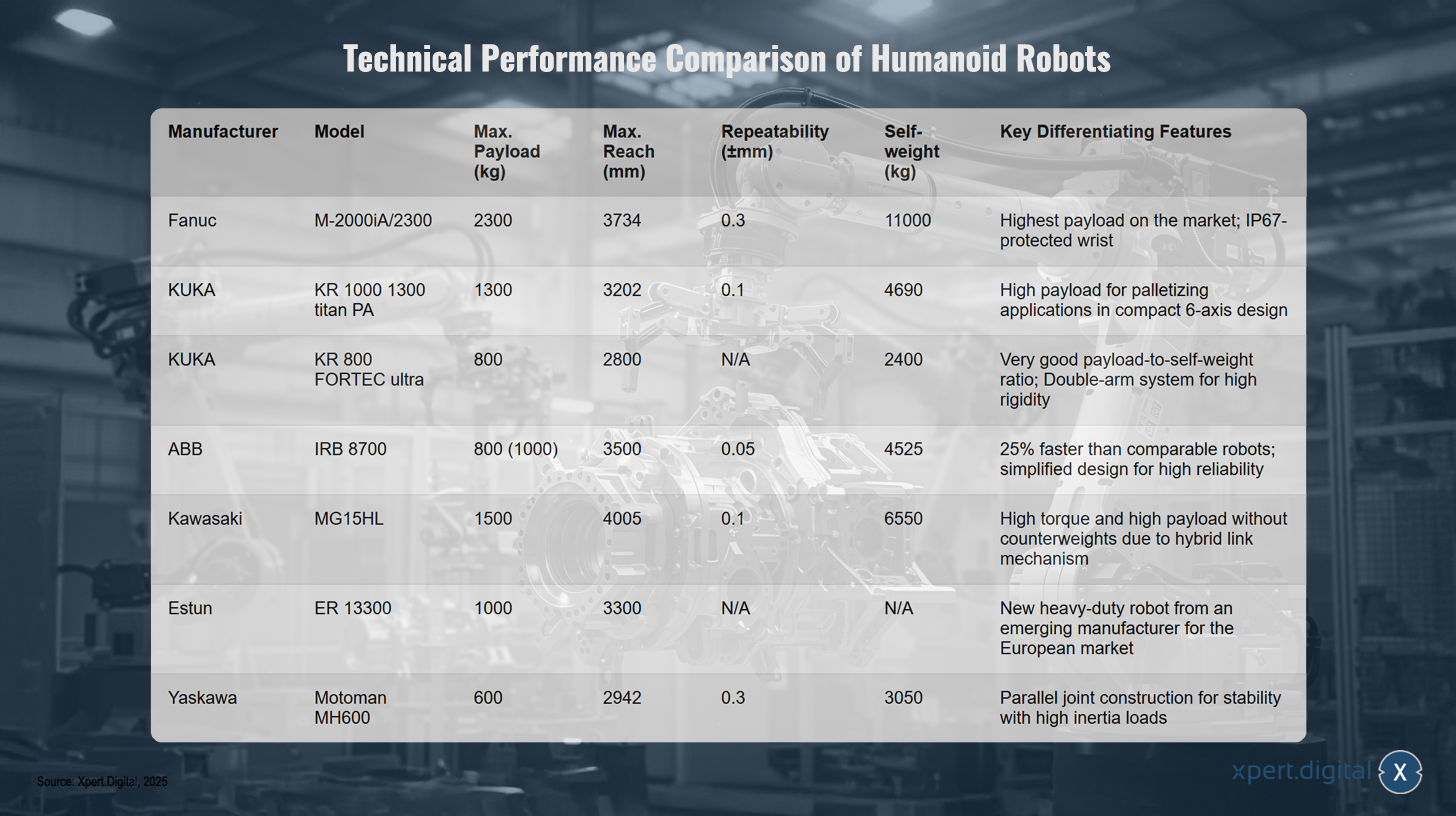
Robotjättar: En jämförelse av de kraftfullaste industrirobotarna – Bild: Xpert.Digital
I industrirobotarnas värld finns det några imponerande jättar som utmärker sig tack vare sin enorma nyttolastkapacitet och tekniska specifikationer. Tillverkare som Fanuc, KUKA, ABB, Kawasaki, Estun och Yaskawa konkurrerar om toppositionen i detta marknadssegment.
Fanuc M-2000iA/2300 utmärker sig med sin exceptionella nyttolastkapacitet på 2300 kg och har även en IP67-skyddad handledskonstruktion. KUKA presenterar KR 1000 1300 titan PA, en robot med en nyttolastkapacitet på 1300 kg, idealisk för palleteringsapplikationer och med en kompakt 6-axlig design. ABB IRB 8700 utmärker sig med 25 % högre hastighet jämfört med liknande modeller och en förenklad design för maximal tillförlitlighet.
Kawasakis MG15HL använder en hybridlänkmekanism som möjliggör högt vridmoment och nyttolaster utan ytterligare motvikter. Yaskawa Motoman MH600 imponerar med sin parallella länkkonstruktion, vilket garanterar stabilitet under belastning med höga tröghetsmoment.
En intressant nykomling är Estun ER 13300, en kraftig robot som siktar på att erövra den europeiska marknaden. Dessa robotar visar imponerande de tekniska framstegen inom industriell automation och den kontinuerliga innovationen hos ledande tillverkare.
Intelligensmotorn: AI och programvara som viktiga differentierande egenskaper
De viktigaste framstegen inom tunga robotar är inte längre av ren mekanisk natur. Snarare är det sammansmältningen av robotteknik med artificiell intelligens och avancerad programvara som i grunden utökar dessa maskiners kapacitet och revolutionerar deras drift.
Från automatisering till autonomi: Inverkan av artificiell intelligens och maskininlärning
AI och maskininlärning (ML) omvandlar industrirobotar från stela, förprogrammerade verktyg till adaptiva, intelligenta system som kan uppfatta, besluta och lära sig. Denna omvandling är avgörande för att hantera variation och komplexitet i moderna tillverknings- och logistikprocesser.
Avancerad uppfattningsförmåga ("ögonen")
Moderna robotar arbetar inte längre i blindo. De är utrustade med mycket sofistikerade sensorsystem, inklusive 2D- och 3D-visionssystem, LiDAR och stereokameror, vilket ger dem en omfattande förståelse av sin omgivning. Denna perceptuella förmåga drivs av djupinlärningsalgoritmer för objektigenkänning, lokalisering och segmentering, vilket gör deras användning i ostrukturerade miljöer möjlig från första början.
Användningsfall – Binplockning: System som KUKA.SmartBinPicking använder avancerad bildbehandling för att identifiera slumpmässigt arrangerade objekt i en behållare, bestämma deras grippunkter och ta bort dem säkert – en uppgift som är praktiskt taget omöjlig med traditionell, regelbaserad programmering.
Användningsfall – Byggarbetsplatsidentifiering: Forskning utvecklar aktivt YOLO-baserade (You Only Look Once) objektidentifieringsmodeller. Dessa gör det möjligt för robotar att identifiera arbetare, fordon och byggnadsstrukturer på dynamiska byggarbetsplatser, vilket är ett grundläggande krav för autonom drift i sådana komplexa miljöer.
Intelligent uppgiftshantering ("hjärnan")
AI tjänar inte bara till att se, utan även till att agera. ML-modeller gör det möjligt för robotar att anpassa sina handlingar till förändrade förhållanden i realtid.
Användningsfall – AI-driven avpalletering: FANUC använder AI-styrda visionssystem för att robotar ska kunna autonomt lossa blandade pallar med varierande kartongstorlekar och positioner. Sådana system kan bearbeta över nio kartonger per minut och ersätter därmed extremt ansträngande manuellt arbete.
Användningsfall – AI-assisterad svetsning: Nästa generations system, som NovAI™, använder maskinseende och AI för adaptiv svetsning i realtid. De kan spåra svetssömmar, anpassa sig till spaltmått och häftsvetsar, och dynamiskt korrigera svetsparametrar. Detta automatiserar processer som tidigare ansågs vara för inkonsekventa för robotteknik på grund av komponenttoleranser och representerar ett betydande framsteg för tung konstruktion inom industrier som varvsindustrin.
Revolutionen inom användarvänlighet: förenkla komplexitet genom avancerad programvara
Traditionellt sett var programmering av industrirobotar en mycket specialiserad uppgift som krävde djupgående kunskaper i proprietära programmeringsspråk som KRL (KUKA) eller RAPID (ABB). Detta utgjorde en hög inträdesbarriär och bromsade implementeringen av automationslösningar.
Nästa generations operativsystem
Ledande tillverkare svarar på denna flaskhals genom att utveckla nya, intuitiva operativsystem som är utformade för att demokratisera robotdrift.
KUKA iiQKA.OS: Ett modernt, Linux-baserat operativsystem med ett webbaserat användargränssnitt (iiQKA.UI) utformat för att vara lika enkelt att använda som en smartphone. Det stöder instruktionsbaserad programmering, möjliggör virtuell driftsättning och är utformat för att främja ett helt ekosystem av tredjepartsappar och hårdvara ("Robotic Republic").
FANUC iHMI: Det "Intelligent Human Machine Interface" är ett grafiskt, pekskärmsbaserat användargränssnitt som är utformat för att drastiskt minska installations- och utbildningstiderna. Det integrerar planerings-, redigerings- och förbättringsverktyg som cykeltidsuppskattning och underhållshantering i ett enda, användarvänligt gränssnitt.
Demokratisering av programmering
Trenden går tydligt mot kodfri eller interaktion med låg kod. Visuella programmeringsmiljöer med dra-och-släpp-funktionalitet och grafiska arbetsflödesredigerare håller på att bli standard. Metoder som kallas "Teaching by Demonstration", där en operatör manuellt styr robotarmen genom en rörelse (manuell vägledning) eller använder externa verktyg som Wandelbots Tracepen för att "demonstrera" en uppgift för roboten, sänker programmeringsbarriären ytterligare.
Simuleringens kraft (digitala tvillingar)
Offline-programmerings- och simuleringsprogram som KUKA.Sim eller ABB RobotStudio har blivit ett oumbärligt verktyg. Det gör det möjligt för företag att virtuellt designa, testa och optimera kompletta robotceller innan de ens beställer den fysiska hårdvaran. Denna "virtuella driftsättning" minskar den faktiska installationstiden avsevärt, minimerar risker genom tidig upptäckt av kollisioner eller tillgänglighetsproblem och gör att programmering kan utföras parallellt med hårdvaruanskaffning.
Denna utveckling pekar på ett fundamentalt skifte inom robotteknik. Tillverkare säljer inte längre bara en robotarm med en styrenhet, utan bygger hela digitala plattformar. Dessa plattformar inkluderar operativsystem, appbutiker, partnernätverk och molnanslutning. KUKA marknadsför aktivt ett partnerekosystem ("Robotic Republic") för iiQKA med öppna gränssnitt för tredjepartsleverantörer. Samtidigt möjliggör plattformar som Bosch Rexroths ctrlX AUTOMATION styrning av robotar från olika märken (ABB, KUKA, FANUC) via ett enhetligt gränssnitt. Denna utveckling återspeglar omvandlingen på smarttelefonmarknaden, där en enhets värde till stor del bestäms av dess appekosystem. Konkurrenslandskapet skiftar därmed från rena hårdvaruspecifikationer till styrkan och öppenheten i mjukvaruekosystemet. För användarna innebär detta mindre beroende av en enda tillverkare, snabbare innovation och tillgång till ett bredare utbud av specialiserade lösningar. Roboten blir en hårdvaruplattform på vilken en mjukvarudefinierad automationslösning byggs.
🎯🎯🎯 Dra nytta av Xpert.Digitals omfattande, femfaldiga expertis i ett heltäckande tjänstepaket | BD, R&D, XR, PR och optimering av digital synlighet


Dra nytta av Xpert.Digitals omfattande, femfaldiga expertis i ett heltäckande tjänstepaket | FoU, XR, PR och optimering av digital synlighet - Bild: Xpert.Digital
Xpert.Digital besitter djupgående kunskap inom olika branscher. Detta gör det möjligt för oss att utveckla skräddarsydda strategier som är exakt anpassade till kraven och utmaningarna inom just ditt marknadssegment. Genom att kontinuerligt analysera marknadstrender och övervaka branschutvecklingen kan vi agera proaktivt och erbjuda innovativa lösningar. Kombinationen av erfarenhet och expertis genererar mervärde och ger våra kunder en avgörande konkurrensfördel.
Mer information här:
Ny mekatronik: Hur tunga robotar bryter mot fysiska gränser
Avancerad mekatronik: Kraftens fysiska utveckling
Parallellt med de snabba framstegen inom mjukvara och AI utvecklas även den fysiska formen av tunga robotar. Innovationer inom design, materialvetenskap och sluteffektorteknik är avgörande för att omsätta denna ökade intelligens i mekanisk prestanda.
Innovationer inom design och material: Mer prestanda med mindre massa
En viktig trend är utvecklingen av robotar som är lättare och mer kompakta samtidigt som de erbjuder samma eller till och med större nyttolastkapacitet. KUKA KR Fortec är till exempel upp till 700 kg lättare än sin föregångare, medan KR FORTEC ultra-serien har ett klassledande nyttolast-till-vikt-förhållande. Denna viktminskning sänker kraven på grunden, minskar energiförbrukningen och möjliggör användning i tätbefolkade och begränsade produktionsanläggningar.
Detta möjliggörs av avancerade kinematiska koncept. KUKAs dubbelarmssystem och Fanucs mycket styva armkonstruktioner förbättrar precisionen och minskar vibrationer vid höga hastigheter och tunga belastningar. Kawasakis hybridlänkmekanism eliminerar behovet av skrymmande motvikter, vilket ökar robotens arbetsyta.
En annan viktig aspekt är modularitet. Robotserier som de från KUKA (KR Quantec, Fortec, Fortec ultra) delar i allt högre grad gemensamma komponenter, såsom centrala händer. Detta förenklar underhållet och minskar reservdelslagerkostnaderna för kunder som driver en diversifierad robotflotta.
För användning i extrema miljöer är specialiserade varianter som "Foundry"- eller "Hygienic"-versioner nu standard. Dessa modeller har IP67-skyddade handleder och kroppar, värme- och korrosionsbeständiga beläggningar och livsmedelsklassade smörjmedel, vilket möjliggör användning i gjuterier, smedjor eller livsmedelsbearbetningsanläggningar.
Nästa generations ändeffektorer: Robotens händer
Griparna i robotarmens ände, så kallade ändeffektorer, utvecklas från enkla pneumatiska klämmor till komplexa mekatroniska system. De är i allt högre grad utrustade med avancerade sensorer som ger adaptiv funktionalitet. Även om de fortfarande främst återfinns i applikationer med lägre nyttolaster, påverkar principer från mjuk robotik och bionik griptekniken. Målet är att hantera en större variation av objektformer och material med högre tillförlitlighet och mindre kraft. För tunga och komplexa objekt utvecklas fleraxliga, heldrivna mekanismer som möjliggör exakt manipulation.
Kraft- och vridmomentsensorer monterade på handleden ger roboten en "känsel". De gör det möjligt för den att utföra känsliga uppgifter som att exakt sammanfoga komponenter, applicera en definierad kraft under slipning eller reagera säkert på oväntade kollisioner.
Sensorekosystemet: grunden för uppfattning och säkerhet
Moderna tunga robotar förlitar sig på ett rikt ekosystem av interna och externa sensorer. Interna sensorer, såsom motorkodare och momentsensorer i lederna, är avgörande för exakt rörelsekontroll. Externa sensorer, såsom 3D-kameror, LiDAR och ultraljudssensorer, tillhandahåller data för miljöuppfattning och möjliggör säkert samarbete mellan människa och robot. Integrerade kollisions- och överbelastningsskyddssystem kan utlösa ett nödstopp vid kollision eller överbelastning, vilket skyddar både roboten och arbetsstycket. Dessa system blir alltmer sofistikerade och erbjuder nu funktioner som pneumatiskt justerbara utlösningströsklar.
Hållbarhet och effektivitet: Fokus på total ägandekostnad (TCO)
Energieffektivitet har blivit ett viktigt designmål. Genom lättviktskonstruktion, programvaruoptimerade rörelsebanor och energibesparande standbylägen minskar tillverkare energiförbrukningen hos sina robotar. Detta sänker inte bara driftskostnaderna utan förbättrar också miljöavtrycket för automationslösningen. Förenklade mekaniska konstruktioner, som de som ABB använder sig av med endast en motor per axel, och modulär konstruktion leder till högre tillförlitlighet (Mean Time Between Failures, MTBF) och snabbare reparationstider (Mean Time To Repair, MTTR), vilket ytterligare minskar de totala driftskostnaderna.
Framsteg inom mekatronik är nära sammanflätade med utvecklingen inom programvara och AI. En styvare, mindre vibrationsbenägen armstruktur (hårdvaruförbättring) är en förutsättning för avancerad rörelsestyrningsprogramvara (programvaruförbättring) för att roboten ska kunna röra sig snabbare och mer exakt. AI-baserade banplaneringsalgoritmer kan sedan beräkna den mest energieffektiva banan för just denna kinematik. Integrerade kraft-momentsensorer ger i sin tur feedback i realtid, vilket gör att styrprogramvaran kan reagera på oförutsedda krafter och göra processen mer robust. Prestandan hos en modern tung robot är således en framväxande egenskap hos det övergripande systemet, där mekanik, sensorer och programvara är oupplösligt sammanlänkade.
Vidgade horisonter: Nya tillämpningsområden för tung robotteknik
Tekniska framsteg inom AI, programvara och mekatronik möjliggör användningen av tunga robotar i industrier som tidigare förlitade sig på manuellt arbete eller strikt automatisering. Robotar lämnar det kontrollerade fabriksgolvet och erövrar dynamiska och ostrukturerade miljöer.
Den automatiserade byggarbetsplatsen
Byggbranschen står inför enorma utmaningar på grund av brist på kvalificerad arbetskraft, höga säkerhetsrisker och ökande produktivitetstryck. Som ett resultat planerar 81 % av byggföretagen att införa robotar inom de kommande tio åren.
Användningsområden: Tunga robotar hanterar massiva komponenter som stålprofiler, prefabricerade betongelement och modulära höljen. De används för automatiserad tillverkning, till exempel för borrning, nitning och infästning av stora komponenter. Ett specifikt exempel är Fischer BauBot, som utvecklades specifikt för borr- och förankringsarbete på stora byggarbetsplatser. Robotar kan också utrustas med skärverktyg för att bearbeta betong- och stålkomponenter på plats med hög precision.
Viktiga teknologier: Framgång i denna ostrukturerade miljö är avgörande för AI-baserad objektigenkänning för att identifiera material och hinder, samt för robusta, mobila plattformar.
Energi för framtiden: Automatisering i produktionen av förnybar energi
Den massiva expansionen av förnybar energi kräver snabbare och mer kostnadseffektiv tillverkning och installation av stora komponenter som vindkraftverksblad och solkraftverk.
Vindenergi: Vid tillverkning av vindturbinblad används robotar för efterbehandling (trimning, slipning, fyllning), vilket förbättrar kvaliteten och befriar arbetare från farliga uppgifter. Vid automatiserad fiberplacering (AFP) lägger robotarmar exakt ner kolfiber- eller glasfiberremsor för att producera lättare och starkare rotorblad. Speciella robotsystem bearbetar bladroten (sågning, fräsning, borrning) och minskar cykeltiderna med upp till 50 % jämfört med konventionella maskiner.
Solenergi: Företag som Charge Robotics och Terabase utvecklar mobila "fabriker" som automatiskt förmonterar och installerar hela sektioner av solmoduler direkt på byggarbetsplatser för solcellsparker, vilket potentiellt fördubblar produktiviteten. AES robot "Maximo" använder AI, LiDAR och maskinseende för att automatisera tunga lyft och montering av solpaneler, vilket minskar tid och kostnader med upp till 50 %. Comaus Hyperflex-system är en mobil fabrik inrymd i en semitrailer som monterar och installerar solcellsspårare direkt på fältet.
Modernisering av tung industri: Varvsindustrin och flyg- och rymdindustrin
Varvsindustrin: Denna traditionellt sett lågautomatiserade industri börjar använda mobila tunga robotar. MR4Weld, utvecklad av Comau i samarbete med Fincantieri-varvet, är en autonom mobil svetsrobot som kan navigera i den ostrukturerade miljön på ett varv för att utföra svetsarbete på stora skrovsektioner. Detta ger ny flexibilitet och effektivitet vid montering av massiva stålkonstruktioner.
Flyg- och rymdteknik: Här används mycket precisa tunga robotar för borrning, nitning och sammanfogning av stora flygplanskomponenter som vingar och flygkroppsdelar, där högsta möjliga noggrannhet och repeterbarhet krävs.
Att sluta kretsloppet: Rollen i den cirkulära ekonomin
Hållbarhetsmål och EU-förordningar driver behovet av effektiv återvinning och upparbetning av komplexa produkter.
Automatiserad demontering: Tunga robotar är idealiska för demontering av stora och tunga produkter.
Elbilsbatterier: På grund av deras höga vikt och potentiella faror (elektriska, kemiska) är robotassisterad demontering av elbilsbatterier en avgörande faktor för säker och ekonomisk återvinning. Forskningsprojekt utvecklar robotceller som automatiskt separerar batterimoduler och celler.
Stor elektronik och motorer: Fraunhofer-institutet arbetar med robotsystem som använder AI och maskinseende för att automatiskt demontera datorer, tvättmaskiner och elmotorer för att återvinna värdefulla material som koppar och sällsynta jordartsmetaller. Detta är ett viktigt steg mot att etablera "urban mining".
Dessa nya tillämpningsområden har en gemensam egenskap: de flyttar roboten från den mycket strukturerade, förutsägbara miljön på en fabriksgolv till ett dynamiskt, ostrukturerat och ofta tufft "fält". Denna förändring i miljön är den främsta drivkraften för den tekniska utvecklingen inom AI, sensorteknik och mekatronik. Den tekniska utmaningen skiftar från att optimera repetitiva rörelser till att hantera osäkerhet. Framtida framgångar kommer att bero mindre på stegvisa förbättringar i hastighet eller precision och mer på genombrott inom miljöuppfattning, autonom navigering och adaptiv uppgiftsplanering.
Vår rekommendation: 🌍 Obegränsad räckvidd 🔗 Uppkopplad 🌐 Flerspråkig 💪 Säljkraft: 💡 Autentisk med strategi 🚀 Innovation möter 🧠 Intuition


Från lokalt till globalt: Små och medelstora företag erövrar världsmarknaden med en smart strategi - Bild: Xpert.Digital
I en tid där ett företags digitala närvaro avgör dess framgång ligger utmaningen i att skapa en autentisk, personlig och långtgående närvaro. Xpert.Digital erbjuder en innovativ lösning som positionerar sig som skärningspunkten mellan en branschnav, en blogg och en varumärkesambassadör. Den kombinerar fördelarna med kommunikations- och försäljningskanaler i en enda plattform och möjliggör publicering på 18 olika språk. Samarbete med partnerportaler och möjligheten att publicera artiklar på Google News och en pressdistributionslista med cirka 8 000 journalister och läsare maximerar innehållets räckvidd och synlighet. Detta representerar en avgörande faktor inom extern försäljning och marknadsföring (SMarketing).
Mer information här:
Tillväxt, möjligheter, hinder: Strategier för tung robotteknik
Den kollaborativa gränsen: Säker människa-robot-interaktion med hög nyttolast
En framväxande och till synes motsägelsefull trend är tillämpningen av samarbetsprinciper på robotar som kan utöva potentiellt dödliga krafter. Denna utveckling förvandlar tunga robotar från isolerade maskiner till kraftfulla lagkamrater.
Bortom buren: Samarbetets spektrum
Det traditionella säkerhetskonceptet med att använda tunga robotar inom säkerhetsinkapslingar är ineffektivt och skapar en strikt åtskillnad mellan mänskliga och maskinella uppgifter. Modernt samarbete mellan människa och robot (HRC) är dock inte ett enda koncept utan ett spektrum som sträcker sig från enkel samexistens (roboten stannar när en person kommer in i dess arbetsområde) till nära samarbete (människa och robot arbetar samtidigt på samma arbetsstycke).
Den största fördelen med denna metod är att samarbetande industrirobotar, till skillnad från traditionella lättviktscobotar, inte har några begränsningar vad gäller nyttolast, hastighet eller precision. De erbjuder därmed det bästa av två världar: prestandan hos en industrirobot och flexibiliteten hos en samarbetande applikation.
Viktiga teknologier för säker tung MRK
Säkert samarbete mellan människa och robot med tunga robotar möjliggörs genom en kombination av avancerade sensorer och intelligenta styrfunktioner.
Avancerade säkerhetssensorer: Grunden för säkert samarbete mellan människa och robot (HRC) är systemets förmåga att upptäcka mänsklig närvaro och avsikter. Detta uppnås genom säkerhetscertifierade laserskannrar, 3D-kameror och till och med tryckkänsliga golv som skapar dynamiska, flerskiktade skyddsfält runt roboten.
Hastighets- och separationsövervakning (SSM): Detta är en viktig samarbetsmetod där robotens hastighet är omvänt proportionell mot dess avstånd från människan. När en person närmar sig saktar roboten ner. Om personen kommer för nära stannar roboten säkert och övervakat. Detta möjliggör smidig och effektiv interaktion utan fysiska barriärer.
Kraft- och kraftbegränsning (PFL): Även om det är utmanande på grund av den höga trögheten hos tunga robotar, tillåter avancerade styrsystem och momentsensorer i varje led även stora robotar att arbeta i ett kraftbegränsat läge för vissa uppgifter. De stannar omedelbart vid oväntad kontakt. Denna funktion används ofta för handstyrning eller förflyttningsuppgifter.
Standardisering och riskbedömning: Implementeringen av säkra applikationer för människa-robot-samarbete (HRC) regleras av standarder som EN ISO 10218 och den tekniska specifikationen ISO/TS 15066. Ett grundläggande krav är alltid en noggrann riskbedömning av hela applikationen – dvs. robot, gripdon, arbetsstycke och miljö. Även en robot som är i sig säker kan hantera ett farligt verktyg.
Denna utveckling leder till en omdefiniering av termen "cobot". Traditionellt sett var denna term synonym med små, lätta och i sig säkra robotarmar. Integreringen av samarbetsfunktioner i tunga industrirobotar bryter mot detta paradigm. "Samarbetande" utvecklas från ett substantiv (en typ av robot, "en cobot") till ett adjektiv eller en uppsättning funktioner ("en samarbetande robotapplikation"). Framtiden ligger inte i det binära valet mellan en "cobot" och en "industrirobot", utan i att välja en industrirobot med lämplig nyttolast och prestanda, som sedan utrustas med de samarbetande säkerhetsfunktioner som krävs för den specifika applikationen. Detta utökar dramatiskt potentialen för människa-robot-samarbete (HRC) till områden som tidigare varit oåtkomliga för nära människa-maskin-samarbete, såsom tung montering eller logistik.
RaaS förklarar: Hur företag kan sänka inträdesbarriären för robotar
Marknaden för tunga robotar är redo för hållbar tillväxt, driven av teknisk innovation och expansion till nya sektorer. En framgångsrik implementering kräver dock att företag fattar strategiska beslut som går utöver enbart teknikutvärdering.
Marknadsstorlek och tillväxtprognoser
Den globala marknaden för industriell robotik är en betydande och växande sektor. Prognoserna för marknadsstorlek varierar beroende på analysens omfattning och metod, men visar konsekvent en positiv trend
- En analys förutspår en tillväxt från 33,9 miljarder USD år 2024 till 60,5 miljarder USD år 2030, vilket motsvarar en genomsnittlig årlig tillväxttakt (CAGR) på 9,9 %.
- En annan studie förväntar sig en tillväxt från 16,9 miljarder USD (2024) till 29,4 miljarder USD år 2029 (CAGR 11,7 %).
- En tredje prognos förutspår en tillväxt från 19,9 miljarder USD (2024) till 55,5 miljarder USD år 2032 (CAGR 14,2 %).
Den specifika marknaden för "Heavy Duty Robot Platforms" uppskattades till 333,5 miljoner USD för 2024, med en prognos på 446,0 miljoner USD år 2030 (CAGR 5,0%). Skillnaden med de totala siffrorna illustrerar att tunga robotar representerar ett värdeintensivt men mindre än genomsnittet segment av den totala marknaden.
Enligt International Federation of Robotics (IFR) nådde det globala operativa lagret av industrirobotar en rekordhög nivå på 4,28 miljoner enheter år 2023, vilket motsvarar en ökning med 10 % jämfört med föregående år. Även om en tillfällig marknadsnedgång inträffade under 2024 förväntas den långsiktiga tillväxttrenden återupptas från och med 2025. Asien, särskilt Kina, är fortfarande den största och snabbast växande marknaden och står för 70 % av de nya installationerna.
Viktiga tillväxtdrivare och hinder
Tillväxtdrivare:
- Kompetensbrist och demografiska förändringar: I många industrialiserade länder driver bristen på kvalificerade arbetstagare automatiseringen av fysiskt krävande och repetitiva uppgifter.
- Industri 4.0 och smart tillverkning: Nätverksuppkoppling och digitalisering av produktionen kräver intelligenta och flexibla robotar som centrala komponenter.
- Utveckling av nya sektorer: Tillväxten drivs i allt högre grad av introduktion till branscher utanför fordonssektorn, såsom logistik, bygg och förnybar energi.
- Hållbarhet och reshoring: Robotar förbättrar materialeffektiviteten, minskar avfall och möjliggör kostnadseffektiv produktion i det egna landet.
Hinder:
- Höga initiala investeringar: Kostnaderna för roboten, dess integration och nödvändig kringutrustning utgör ett betydande hinder, särskilt för små och medelstora företag.
- Integrationskomplexitet: Trots mer användarvänliga gränssnitt kan det fortfarande vara en utmaning att integrera robotar i befintliga äldre system och säkerställa interoperabilitet.
Strategiska krav för implementering
För företag som överväger att använda tunga robotar är följande strategiska överväganden avgörande:
- Att flytta fokus från kapitalutgifter (Capex) till total ägandekostnad (TCO) och avkastning på investeringen (ROI): Investeringsbeslut bör inte enbart baseras på inköpspriset. En helhetsanalys av den totala ägandekostnaden (TCO) – inklusive energiförbrukning, underhåll och tillgänglighet – samt avkastning på investeringen (ROI) – driven av högre genomströmning, förbättrad kvalitet och minskade arbetskraftskostnader – är avgörande.
- Användning av nya affärsmodeller: Modeller som Robotics-as-a-Service (RaaS) sänker den initiala investeringsbarriären genom att göra det möjligt för företag att hyra robotkapacitet som en driftskostnad snarare än att göra en kapitalinvestering.
- Investeringar i personalutveckling: Att förenkla programmeringen eliminerar inte behovet av kvalificerade medarbetare. Snarare flyttar det de nödvändiga färdigheterna från ren kodprogrammering till uppgifter på högre nivå som processoptimering, systemövervakning och underhåll. Företag måste investera i vidareutbildning av sin personal för att effektivt hantera och samarbeta med dessa intelligenta maskiner.
- Prioritera programvara och ekosystem: När man väljer en robot bör tillverkarens programvaruplattform, dess användarvänlighet och bredden av dess partnerekosystem vara viktiga kriterier. Ett starkt ekosystem ger tillgång till förintegrerade lösningar och framtidssäkrar investeringen mot förändrade krav.
Vi finns här för dig - Konsulttjänster - Planering - Implementering - Projektledning
☑️ Stöd till små och medelstora företag inom strategi, konsultation, planering och implementering
☑️ Skapande eller omstrukturering av den digitala strategin och digitaliseringen
☑️ Utökning och optimering av internationella säljprocesser
☑️ Globala och digitala B2B-handelsplattformar
☑️ Pionjär inom affärsutveckling

Konrad Wolfenstein
Jag skulle gärna fungera som din personliga rådgivare.
Du kan kontakta mig genom att fylla i kontaktformuläret nedan eller helt enkelt ringa mig på +49 7348 4088 965 .
Jag ser fram emot vårt gemensamma projekt.
Skriv till mig



Xpert.Digital - Konrad Wolfenstein
Xpert.Digital är ett nav för industrin med fokus på digitalisering, maskinteknik, logistik/intralogistik och solceller.
Med vår 360° affärsutvecklingslösning stödjer vi välrenommerade företag från nya affärer till eftermarknadsförsäljning.
Marknadsinformation, smarketing, marknadsautomation, innehållsutveckling, PR, utskick, personliga sociala medier och lead nurturing är en del av våra digitala verktyg.
Du hittar mer information på: www.xpert.digital - www.xpert.solar - www.xpert.plus
Håll kontakten