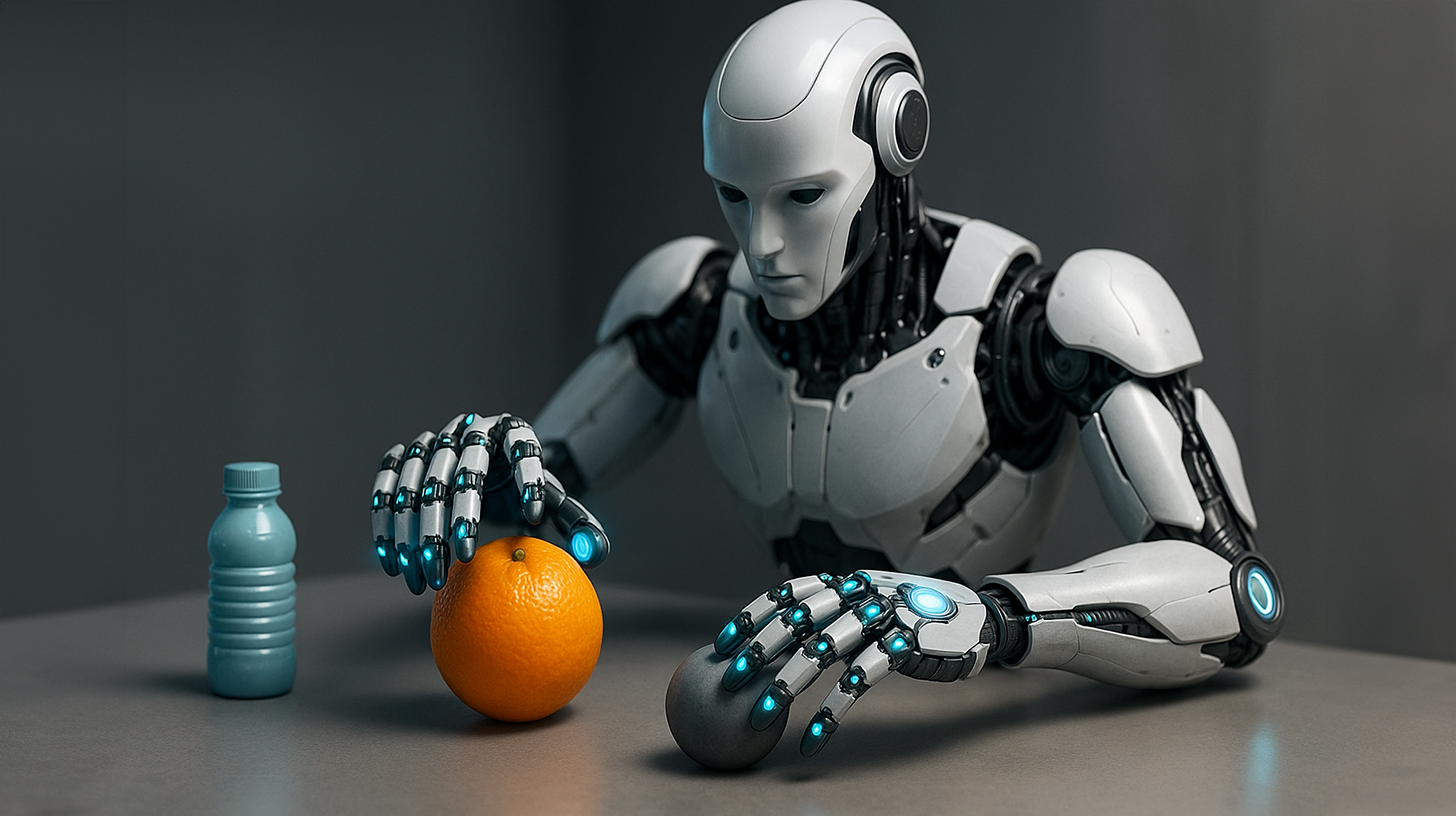
Taktil robotik: Robotar med känsel: Den nya generationen från Vulcan och MIT-forskning om haptisk objektigenkänning – Bild: Xpert.Digital
MIT:s objektigenkänningssystem utan speciella sensorer och Amazons Vulcan-robot
Haptisk perception för maskiner: Sätter nya standarder för objektigenkänning
Inom robotikområdet markerar utvecklingen av taktila sensorer och igenkänningssystem ett avgörande framsteg, då maskiner för första gången inte bara kan se sin omgivning utan också "känna" den. Denna utveckling exemplifieras av Amazons nya Vulcan-robot och MITs innovativa objektigenkänningssystem. Båda teknikerna utökar robotarnas tillämpningar avsevärt och möjliggör uppgifter som tidigare bara kunde utföras av människor med sin naturliga haptiska uppfattning.
Relaterat till detta:


Amazons Vulcan-robot: Ett genombrott inom taktil robotgreppning
Funktionella och tekniska grunder
Roboten Vulcan, utvecklad av Amazon, representerar ett betydande tekniskt framsteg inom området fysisk artificiell intelligens. Amazon beskriver själva utvecklingen som ett "genombrott inom robotik och fysisk AI". Systemet består av två huvudkomponenter: "Stow" för att lagra föremål och "Pick" för att hämta dem. Dess enastående egenskap är dess förmåga att uppfatta sin omgivning taktilt.
Den tekniska grunden för Vulcans taktila förmågor består av speciella kraft-vridmomentsensorer, formade som en hockeypuck, som gör att roboten kan "känna" hur mycket kraft den kan använda för att gripa tag i ett föremål utan att skada det. Adam Parness, chef för robotik-AI på Amazon, betonar det unika med denna metod: "Vulcan är inte vår första robot som kan flytta föremål. Men med sin känsel – sin förmåga att förstå när och hur den kommer i kontakt med ett föremål – öppnar den upp nya möjligheter för att optimera arbetsflöden och anläggningar.".
För att sortera varor på hyllor använder Vulcan ett verktyg som liknar en linjal fäst vid en plattång. Med denna "linjal" skjuter han andra varor åt sidan för att ge plats åt nya. Griparmarna justerar sin greppstyrka beroende på varans storlek och form, medan integrerade transportband flyttar varan in i behållaren. För att hämta varor använder Vulcan en suggripare i kombination med ett kamerasystem.
Nuvarande tillämpningsområden och prestanda
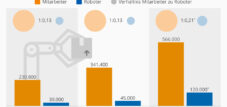
Vulcan-roboten testas för närvarande i två Amazon-logistikcenter: i Winsen nära Hamburg (Tyskland) och i Spokane, Washington (USA). I Washington är sex Stow Vulcan-robotar i drift och har redan framgångsrikt lagrat en halv miljon artiklar. I Winsen arbetar två Pick Vulcan-robotar och har redan bearbetat 50 000 beställningar.
Systemets kapacitet är anmärkningsvärd: Vulcan kan för närvarande hantera ungefär 75 procent av de miljontals produkter som erbjuds av Amazon. Det minsta objekt roboten kan manipulera är ungefär lika stort som ett läppstift eller ett USB-minne. Särskilt imponerande är robotens förmåga att identifiera objekt i realtid, eftersom det skulle vara "omöjligt för den att känna till alla detaljer om varorna utantill", som Parness förklarar.
Framtidsplaner och integration i logistikkedjan
Amazon planerar att öka antalet Vulcan-robotar avsevärt under de kommande åren. I år förväntas antalet Vulcan-robotar i Winsen öka till 60 och i Washington till 50. Den långsiktiga planen är att distribuera robotarna i logistikcenter i hela Europa och USA.
En viktig aspekt av Amazons strategi är samexistensen mellan människor och maskiner. Företagets "masterplan" föreställer sig att människor och maskiner arbetar sida vid sida. Robotarna är främst avsedda att hantera de produkter på hyllorna som människor inte kan nå utan en stege eller som skulle kräva överdriven böjning. Detta förväntas leda till större total effektivitet samtidigt som det minskar arbetsbelastningen för mänskliga anställda.
MIT:s objektdetekteringssystem genom hantering: Intelligent "avkänning" utan speciella sensorer
Innovativ metod för objektigenkänning
Parallellt med Amazons Vulcan har forskare från MIT, Amazon Robotics och University of British Columbia utvecklat ett system som har en annan metod för att ge robotar haptiska förmågor. Denna teknik gör det möjligt för robotar att känna igen egenskaper hos ett objekt, såsom vikt, mjukhet eller innehåll, genom att helt enkelt plocka upp det och försiktigt skaka det – ungefär som människor gör när de hanterar okända föremål.
Det speciella med den här metoden är att inga speciella taktila sensorer behövs. Istället använder systemet de ledkodare som redan finns i de flesta robotar – sensorer som känner av ledernas rotationsposition och hastighet under rörelse. Peter Yichen Chen, postdoktor vid MIT och huvudförfattare till forskningsartikeln, förklarar visionen bakom projektet: ”Min dröm skulle vara att skicka ut robotar i världen så att de kan röra och flytta saker och självständigt upptäcka egenskaperna hos allt de interagerar med.”.
Teknisk funktionalitet och simuleringsmodeller
Kärnan i MIT-systemet består av två simuleringsmodeller: en som simulerar roboten och dess rörelser, och en som replikerar objektets dynamik. Chao Liu, en annan postdoktor vid MIT, betonar vikten av dessa digitala tvillingar: ”En korrekt digital kopia av den verkliga världen är verkligen viktig för att vår metod ska lyckas.”.
Systemet använder en teknik som kallas ”differentierbar simulering”, vilket gör att algoritmen kan förutsäga hur små förändringar i ett objekts egenskaper, såsom massa eller mjukhet, kommer att påverka robotens leders slutliga position. När simuleringen matchar robotens faktiska rörelser har systemet identifierat objektets korrekta egenskaper.
En viktig fördel med den här metoden är dess effektivitet: Algoritmen kan utföra beräkningarna inom några sekunder och kräver bara en verklig rörelsebana för roboten för att fungera. Detta gör systemet särskilt kostnadseffektivt och praktiskt för verkliga tillämpningar.
Applikationspotential och fördelar
Den utvecklade tekniken kan vara särskilt användbar i tillämpningar där kameror är mindre effektiva, såsom att sortera föremål i en mörk källare eller röja skräp i en delvis kollapsad byggnad efter en jordbävning.
Eftersom algoritmen inte kräver en stor datamängd för träning, till skillnad från vissa metoder som förlitar sig på datorseende eller externa sensorer, är den mindre benägen att orsaka fel i okända miljöer eller nya objekt. Detta gör systemet särskilt robust och mångsidigt.
Det bredare forskningslandskapet kring taktila sensorer inom robotik
Grundläggande utmaningar och aktuella lösningar
Utvecklingen av robotar med känsel ställer forskare inför grundläggande utmaningar. Medan det mänskliga taktila systemet är extremt komplext och nyanserat, måste artificiella system replikera detta med hjälp av tekniska medel. Ken Goldberg, robotforskare vid University of California, Berkeley, betonar komplexiteten i denna uppgift: ”Det mänskliga känselsystemet är otroligt nyanserat och komplext, med ett stort dynamiskt omfång. Även om robotar gör snabba framsteg skulle jag bli förvånad om jag såg taktila sensorer på mänsklig nivå under de kommande fem till tio åren.”.
Trots dessa utmaningar görs betydande framsteg inom forskningen. Till exempel utvecklar Fraunhofer IFF taktila sensorsystem som möjliggör reaktivt grepp, imiterar den mänskliga handen och är idealiska för hantering av ömtåliga eller flexibla föremål. Sensordata används för gripdonsanpassning, komponent- och positionsidentifiering samt processövervakning.
Innovativa forskningsprojekt inom taktil robotik
Förutom utvecklingen från Amazon och MIT finns det andra betydande forskningsprojekt inom området taktila robotsensorer:
Max Planck-institutet för intelligenta system har utvecklat en haptisk sensor som heter Insight, som detekterar beröring med hög känslighet. Georg Martius, chef för en forskargrupp vid institutet, betonar sensorns prestanda: ”Vår sensor uppvisar enastående prestanda tack vare den innovativa mekaniska designen av dess hölje, det specialdesignade avbildningssystemet inuti, den automatiska datainsamlingen och de allra senaste djupinlärningsmetoderna.” Sensorn är så känslig att den till och med kan känna av sin egen orientering i förhållande till gravitationen.
Ett annat intressant projekt är DensePhysNet, ett system som aktivt utför en sekvens av dynamiska interaktioner (t.ex. glidning och kollision) och använder en djup prediktiv modell över sina visuella observationer för att lära sig täta, pixelvisa representationer som återspeglar de fysiska egenskaperna hos observerade objekt. Experiment i både simulering och verkliga miljöer visar att de inlärda representationerna innehåller rik fysisk information och kan användas direkt för att avkoda fysiska objektegenskaper såsom friktion och massa.
Relaterat till detta:

Framtidsutsikter för taktila robotsystem
Integrering av multimodala sensorsystem
Framtiden för taktil robotik ligger i integrationen av olika sensoriska modaliteter. Forskare vid MIT arbetar redan med att lära artificiell intelligens att kombinera sinnen som syn och känsel. Genom att förstå hur dessa olika sensoriska modaliteter interagerar kan robotar utveckla en mer holistisk förståelse av sin omgivning.
MIT-teamet planerar redan att kombinera sin objektdetekteringsmetod med datorseende för att skapa ett multimodalt sensorsystem som är ännu kraftfullare. ”Detta arbete försöker inte ersätta datorseende. Båda metoderna har sina fördelar och nackdelar. Men här har vi visat att vi redan kan upptäcka några av dessa egenskaper även utan kamera”, förklarar Chen.
Utökade användningsområden och framtida utvecklingar
Forskarna vid MIT-teamet vill också utforska tillämpningar med mer komplexa robotsystem, såsom mjuka robotar, och mer komplexa objekt, inklusive skvalpande vätskor eller granulära medier som sand. På lång sikt hoppas de kunna använda den här tekniken för att förbättra robotinlärning, vilket gör det möjligt för framtida robotar att snabbt utveckla nya manipulationsfärdigheter och anpassa sig till förändringar i sin omgivning.
Amazon planerar att vidareutveckla och driftsätta Vulcan-tekniken i större skala under de kommande åren. Integrationen av Vulcan med företagets befintliga flotta på 750 000 mobila robotar antyder ett omfattande automationskoncept som i grunden skulle kunna förändra logistikbranschen.
Taktil inlärning: När sensorer ger robotar en känsel
Utvecklingen av robotar med känsel, exemplifierat av Amazons Vulcan och MITs objektigenkänningssystem, markerar en avgörande vändpunkt inom robottekniken. Dessa teknologier gör det möjligt för robotar att ta sig an uppgifter som tidigare var enbart människors domän, eftersom de kräver finmotorik och taktil förståelse.
De olika tillvägagångssätten – Amazons fokus på specialiserade sensorer och MITs koncept att använda befintliga sensorer för haptisk inferens – visar på mångfalden av forskningsinriktningar inom detta område. Båda tillvägagångssätten har sina specifika styrkor och tillämpningsområden.
Med den ökande integrationen av taktila funktioner i robotsystem öppnas nya möjligheter för automatisering av komplexa uppgifter inom logistik, tillverkning, sjukvård och många andra områden. Robotars förmåga att inte bara se utan också "känna" sin omgivning för oss ett betydande steg närmare en framtid där robotar och människor kan samarbeta ännu närmare och intuitivt.
Relaterat till detta: