
Shuttle vs. Robot | Shuttle Systems vs. Autonomous Robot: En omfattande analys av framtidens dominerande lagersystem
Xpert pre-release

Röstval 📢
Publicerad den: 19 juli 2025 / Uppdaterad den: 19 juli 2025 – Författare: Konrad Wolfenstein

Automatiserat lager med robotar – Bild: Xpert.Digital
Autonoma robotar eller shuttlesystem? Transformativ lagerteknik: Vilken strategi säkrar företag en konkurrensfördel?
Automationsrevolutionen inom intralogistik
Intralogistik, den moderna ekonomins nervsystem, genomgår en djupgående förändring. Frågan om vilket lagersystem som kommer att dominera framtiden – det strukturerade, genomströmningsoptimerade shuttlesystemet eller den flexibla, autonoma roboten – är långt mer än en teknisk debatt. Det har blivit ett avgörande strategiskt beslut som kommer att avgöra företagens konkurrenskraft, motståndskraft och framtida lönsamhet i en alltmer volatil värld.
Lämplig för detta:

Varför är debatten om "shuttle kontra robot" så avgörande för industrins framtid idag?
Tre grundläggande krafter driver denna utveckling obevekligt framåt.
- För det första har den exponentiella tillväxten av e-handel för alltid omdefinierat kundernas förväntningar. Kravet på omedelbar tillgänglighet, leverans samma dag och felfri orderhantering skapar enorm press på lager och distributionscentraler.
- För det andra förvärrar en ihållande brist på kvalificerad och allmän arbetskraft i många industrialiserade länder situationen dramatiskt. Att hitta och behålla kvalificerad personal för repetitivt och fysiskt krävande lagerarbete håller på att bli ett av de största operativa hindren.
- För det tredje tvingar stigande drifts-, energi- och fastighetskostnader företag att använda sina utrymmen mer effektivt och optimera processer in i minsta detalj.
Mot denna bakgrund är automatisering inte längre ett alternativ, utan en nödvändighet. Den globala marknaden för lagerautomation återspeglar denna brådska: med ett uppskattat värde på 26,5 miljarder USD år 2024 och en prognostiserad årlig tillväxttakt (CAGR) på över 15,9 % fram till 2034 är det en av de mest dynamiska tekniksektorerna. Anmärkningsvärt är dock att trots denna snabba tillväxt är cirka 80 % av alla lager världen över fortfarande huvudsakligen manuellt drivna. Denna enorma outnyttjade potential utgör slagfältet där shuttlesystem och autonoma mobila robotar (AMR) tävlar om dominans.
Valet mellan dessa två teknologiska filosofier är ett beslut om ett företags strategiska inriktning. Det återspeglar en grundläggande spänning i moderna leveranskedjor: konflikten mellan behovet av kostnadseffektivitet genom högoptimerade, förutsägbara processer och kravet på flexibilitet genom maximalt anpassningsbara och flexibla operationer. Shuttlesystem är den fysiska förkroppsligandet av strukturerad effektivitet, utformade för maximal lagringstäthet och högsta genomströmning inom en fast infrastruktur. AMR, å andra sidan, förkroppsligar adaptiv flexibilitet, skapad för att navigera i dynamiska, ständigt föränderliga miljöer. Ett företag som investerar i ett shuttlesystem satsar på en framtid där dess produktmix och orderstruktur är tillräckligt stabila för att dra nytta av denna extrema optimering. Ett företag som väljer AMR förutser en framtid full av variation och oförutsägbarhet, där förmågan att snabbt anpassa sig är den avgörande konkurrensfördelen. Det teknologiska beslutet blir således en återspegling av ett företags strategiska prognos för sin egen marknad.
Definition och funktion av kärnteknologier
Vad menas exakt med ett shuttlesystem och vilka är dess kärnkomponenter?
Ett shuttlesystem är ett mycket dynamiskt, datorstyrt automatiserat smådelslager (AS/RS) utformat för snabb och effektiv lagring, flyttning och hämtning av standardiserade lastenheter såsom containrar, kartonger eller brickor. Det är ett komplext mekatroniskt system som går långt utöver den förenklade analogin med ett "transportband". Prestandan och effektiviteten hos ett sådant system är resultatet av den exakta interaktionen mellan dess kärnkomponenter:
- Ställsystem: Systemets statiska ryggrad är en högdensitetsstålkonstruktion som bildar förvaringskanaler för lastenheterna. Dessa ställ är utformade för att maximera användningen av tillgänglig höjd och kan nå höjder på över 20 meter, i vissa fall till och med upp till 30 meter.
- Skyttlar (fordon): Dessa är de riktiga arbetshästarna. Det är autonoma fordon som rör sig horisontellt på räls inom en enda hyllplan. Utrustade med teleskopgafflar eller liknande lasthanteringsanordningar plockar de upp lastenheterna från hyllfacken och transporterar dem till slutet av gången.
- Lyftanordningar/hissar: Dessa viktiga komponenter utgör den vertikala förbindelsen. De transporterar antingen lastenheterna eller, i vissa systemarkitekturer, själva skytteltransporterna mellan de olika ställnivåerna och förzonen, som vanligtvis består av transportbandsteknik. Deras prestanda är ofta en avgörande faktor för systemets totala genomströmning.
- Transportbandsteknik: Ett sammankopplat nätverk av rull- eller bandtransportörer utgör gränssnittet mot omvärlden. Det transporterar varorna från lagerstationen till hissarna och från hissarna till efterföljande processer som plocknings-, packnings- eller transportarbetsstationer.
- Styrning och programvara (WMS/WCS/MFS): "Hjärnan" i hela verksamheten. En överordnad programvara för lagerhantering (WMS) eller ett specialiserat lagerstyrningssystem (WCS) eller materialflödessystem (MFS) koordinerar varje enskild rörelse. Den hanterar lagerplatserna, optimerar transportstrategierna för skyttlarna och hissarna och säkerställer sömlös integration med företagets övergripande IT-landskap, såsom ERP-systemet (Enterprise Resource Planning).
Vilka är de grundläggande typerna av shuttle-system och hur skiljer de sig åt i arkitektur och tillämpning?
Tekniken för skyttelsystem har genomgått en anmärkningsvärd utveckling, från rigida, endimensionella arkitekturer till mycket flexibla, tredimensionella system. Denna utveckling är ett direkt svar på marknadens ökande krav på större flexibilitet och skalbarhet.
- Ennivåsshuttle: Detta är den klassiska arkitekturen där varje shuttle är permanent tilldelad en enda hyllplan och gång. Genomströmningen bestäms av antalet shuttlar per plan och hissens kapacitet. Skalbarhet uppnås främst genom att lägga till fler gångar. Exempel på detta är SSI Flexi- och Cuby-systemen.
- Flernivåsshuttle: Denna variant, ofta beskriven som en hybrid mellan en klassisk lagrings- och hämtningsmaskin (SRM) och en shuttle, kan betjäna flera nivåer inom en gång via en integrerad lyftmekanism. Detta minskar komplexiteten och kostnaden för ställstrukturen och erbjuder ett attraktivt pris-prestandaförhållande för applikationer med medelhög till hög genomströmning. Ett exempel är Schäfer Lift & Run (SLR)-systemet.
- Filbytes-/3D-shuttles: Ett betydande evolutionärt språng. Dessa shuttlar kan inte bara röra sig horisontellt inom sin gång utan även byta gång. Detta frikopplar helt prestanda (antal shuttlar) från lagerkapacitet (antal ställplatser). Ett företag kan börja med bara ett fåtal shuttlar och enkelt lägga till fler allt eftersom efterfrågan ökar. Dessutom möjliggör de skapandet av en 100 % sekvens av varor som kan hämtas direkt i systemet, vilket potentiellt eliminerar behovet av sorteringsprocesser efterföljande. KNAPP Evo Shuttle 2D är ett framstående exempel på denna typ av shuttle.
- Klätterrobotar / kubförvaringssystem: Denna revolutionerande utveckling bryter med traditionell skyttelarkitektur. Här färdas robotarna antingen på en rutnätsram ovanför tätt staplade containrar (t.ex. AutoStore) eller klättrar direkt upp och ner i hyllstrukturen (t.ex. Exotec Skypod). Dessa 3D-system eliminerar helt behovet av separata gångar och hissar, vilket resulterar i extremt hög förvaringsdensitet och flexibilitet.
- Pallbussar: En specialiserad kategori för högdensitetslagring av hela pallar. Dessa robusta bussar arbetar i djupa lagringskanaler och används ofta i kylförvaring eller för buffertlagring i produktion.
Denna tekniska utveckling inom shuttle-världen är anmärkningsvärd. Den visar att tillverkare har insett utmaningen med mer flexibla AMR-system och aktivt försöker integrera AMR-liknande egenskaper – såsom möjligheten att byta gångar eller arbeta tredimensionellt – i sitt högdensitetslagringsparadigm. Som ett resultat suddas de en gång tydliga gränserna ut, och de mest avancerade "shuttle-systemen" idag är i huvudsak specialiserade, vertikalt orienterade AMR-system som arbetar inom en definierad struktur.
Vad är en ”robot” i ett lagersammanhang, och vad är den avgörande skillnaden mellan autonoma mobila robotar (AMR) och förarlösa transportsystem (AGV)?
I lagerhållningssammanhang är skillnaden mellan "robot" som en allmän term och de specifika teknologierna AGV (Automated Guided Vehicle) och AMR (Autonomous Mobile Robot) av grundläggande betydelse. Även om båda är transportmaterial, är de baserade på fundamentalt olika navigationsfilosofier.
- AGV (Automated Guided Vehicle): Detta är den äldre, etablerade tekniken. AGV:er är "styrda" fordon. De följer fasta, fysiskt eller virtuellt definierade vägar, förutbestämda av magnetremsor i golvet, färgade linjer, laserskannrar riktade mot reflektorer eller andra styrsystem. Deras intelligens är begränsad: Om en AGV stöter på ett hinder stannar den och väntar tills vägen är fri igen. Implementeringen är komplex, kräver ofta strukturella modifieringar av infrastrukturen och det resulterande systemet är stelt. Varje ändring av rutten innebär avsevärd ansträngning.
- AMR (Autonomous Mobile Robot): Detta är den nyare, mycket mer intelligenta och flexibla tekniken. AMR är "autonoma" fordon. De kräver ingen extern vägledning. Istället skapar de en digital karta över sin omgivning och navigerar fritt, ungefär som en självkörande bil. Med hjälp av sina avancerade sensorer upptäcker de hinder som människor, gaffeltruckar eller obevakade pallar i realtid och planerar dynamiskt en alternativ rutt för att undvika dem. Implementeringen är snabb, kräver inga strukturella modifieringar och erbjuder maximal flexibilitet.
Medan de teknologiska gränserna alltmer suddas ut i takt med att AGV:er också är utrustade med mer intelligenta funktioner, kvarstår den centrala skillnaden: En AGV följer en fördefinierad bana, medan en AMR navigerar intelligent i ett fritt framkomligt utrymme. Därför fokuserar följande analys tydligt på flexibla AMR:er som den verkliga teknologiska motsvarigheten till strukturerade shuttle-system.
Hur navigerar och arbetar AMR:er i en dynamisk lagermiljö för att autonomt utföra sina uppgifter?
Autonomin och flexibiliteten hos AMR-system baseras på ett mycket sofistikerat samspel mellan kartläggning, sensorer och intelligent programvara. Processen kan delas in i flera steg:
- Kartläggning: Innan en AMR kan påbörja sitt arbete måste en digital karta över lagret skapas. Detta görs antingen "offline", genom att manuellt köra en robot genom miljön för att samla in data, eller "online", där roboten skapar och förfinar kartan i realtid under drift.
- Lokalisering (SLAM): För att veta sin plats använder AMR en teknik som kallas SLAM (Simultaneous Localization and Mapping). Roboten jämför kontinuerligt data från sina sensorer med den lagrade kartan för att bestämma sin egen position och orientering i realtid med hög precision.
- Sensorer: AMR-enheter är utrustade med en mängd olika sensorer som ger dem en omfattande 360-graders översikt över omgivningen:
- LiDAR (Light Detection and Ranging): Laserskannrar avger ljuspulser och mäter deras reflektioner för att skapa ett exakt punktmoln av omgivningen. Detta är den primära tekniken för att kartlägga och upptäcka hinder på avstånd.
- 3D-kameror: De fångar visuell data och djupinformation, vilket förbättrar objektigenkänning. De används också ofta för finpositionering genom att läsa QR-koder eller andra markeringar på golvet eller i hyllorna.
- IMU (Inertial Measurement Unit): Ett tröghetsmätningssystem som mäter acceleration och rotationshastigheter och hjälper roboten att spåra sin egen rörelse mellan sensoruppdateringar.
- Navigering och hinderundvikning: Flotthanteringssystemet tilldelar en destination till AMR (t.ex. "kör till paketstation 5"). Roboten beräknar sedan den optimala rutten. Under resan övervakar sensorer kontinuerligt vägen. Om ett oväntat hinder upptäcks stannar AMR inte bara, utan analyserar situationen och planerar en omväg på bråkdelar av en sekund för att ändå nå sin destination.
- Artificiell intelligens (AI) och maskininlärning (ML): Avancerade algoritmer arbetar i bakgrunden för att tolka de enorma mängderna data från sensorerna, fatta de säkraste och mest effektiva besluten om ruttplanering och förbättra robotens navigationsprestanda genom kontinuerlig inlärning över tid.
Dina intralogistikexperter

Konsulttjänster, planering och implementering av kompletta lösningar för höglager och automatiserade lagersystem - Bild: Xpert.Digital
Mer om detta här:
Shuttle vs. AMR: Intelligenta robotar eller klassiska shuttlesystem?
Direkt systemjämförelse – En flerdimensionell analys
Hur presterar shuttle-system och AMR i en direkt prestandajämförelse avseende genomströmning och hastighet?
Prestanda, mätt i genomströmning (t.ex. lagring och hämtning per timme), är en av de viktigaste skillnaderna mellan de två systemfilosofierna.
Skyttelsystem är konstruerade från grunden för extremt hög genomströmning i en definierad miljö. Deras arkitektur är konstruerad för att parallellisera rörelser. Medan dussintals skyttlar rör sig horisontellt på sina respektive nivåer samtidigt, arbetar hissarna oberoende i vertikal riktning. Denna frikoppling av horisontella och vertikala transportvägar möjliggör massiv topprestanda. Ledande system kan uppnå genomströmningshastigheter på över 1 000 dubbelcykler (en lagring och en hämtning) per timme och gång. Detta gör skyttelsystem till de obestridda "sprinterarna" för högfrekventa, repetitiva lagrings- och hämtningsuppgifter i en fast struktur.
Autonoma mobila robotar (AMR), i sin traditionella form, är inte primärt optimerade för maximal genomströmning på minsta möjliga utrymme. Deras styrka ligger i flexibel och effektiv transport av gods över varierande och ofta långa avstånd i en dynamisk miljö. Medan en enda AMR kan nå hastigheter på upp till 4 m/s, beror den totala genomströmningen för en flotta på många faktorer: rutternas komplexitet, trafikvolymen från andra robotar eller människor, avståndet mellan stationer och den allmänna orderstrukturen. De är mer som "maratonlöpare", som anpassar sig till förändrade förhållanden.
Den tidigare nämnda konvergensen av tekniker är dock även tydlig här. Så kallade kublagringssystem som Exotec Skypod, som är baserade på klätterrobotar, är uttryckligen utformade för att kombinera flexibiliteten hos AMR:er med mycket hög genomströmning. Vid sammankopplade plockstationer kan genomströmningar på upp till 400 plockningar per timme och station uppnås. Dessa hybridmetoder utmanar alltmer den traditionella dikotomin "shuttle = hög genomströmning" och "AMR = hög flexibilitet".
Lämplig för detta:

Vilket system erbjuder högre lagringsdensitet och använder det tillgängliga utrymmet mer effektivt?
Lagringstäthet är ett traditionellt nyckelargument och en domän för shuttle-system. I en värld av stigande fastighets- och markpriser är maximering av volymutnyttjande en avgörande ekonomisk faktor.
Shuttlesystem erbjuder oöverträffad lagringsdensitet. Genom att minimera antalet gångar och utnyttja den fulla tillgängliga byggnadshöjden på upp till 30 meter eller mer, komprimeras lagringsutrymmet extremt. Tekniker som dubbel- eller multidjuplagring av containrar i kanalerna maximerar ytterligare kapaciteten på en given yta.
AMR-lager i sin klassiska form, som transporterar varor mellan hyllor med brett avstånd, kräver naturligtvis bredare transportvägar och kan inte utnyttja den vertikala dimensionen lika effektivt. Deras optimering fokuserar inte på statisk lagringsdensitet, utan på dynamisk processeffektivitet.
Men även inom denna disciplin suddas de tydliga gränserna ut. De tidigare nämnda kubförvaringssystemen (som AutoStore eller Exotec Skypod) uppnår extremt hög lagringsdensitet genom att stapla containrar direkt ovanpå varandra utan hyllor, där robotar kommer åt den önskade containern uppifrån. De kombinerar densiteten hos ett kompakt lager med robotarnas flexibilitet. En ytterligare utveckling är klättrande AMR (Automated Climbing Robots, ACR), som kan betjäna höga standardhyllor, vilket avsevärt förbättrar det vertikala utrymmesutnyttjandet jämfört med rent markbaserade fordon.
Hur flexibla och skalbara är de två systemen med avseende på förändrade affärskrav och säsongsbetonade toppar?
Flexibilitet och skalbarhet är kännetecknen för AMR:er och representerar ofta det avgörande argumentet för deras användning på volatila marknader.
AMR:er erbjuder maximal flexibilitet och skalbarhet:
- Skalbarhet: Anpassning till högre ordervolymer är anmärkningsvärt enkelt. För att öka genomströmningen läggs helt enkelt ytterligare robotar till den befintliga flottan. Denna process kan slutföras inom minuter eller timmar utan driftsavbrott. Lagringskapaciteten kan utökas genom att installera ytterligare hyllor, helt oberoende av genomströmningen (dvs. antalet robotar).
- Flexibilitet: AMR:er är programvarudefinierade. Nya rutter, ytterligare arbetsstationer eller helt förändrade processflöden kan implementeras omedelbart via programuppdateringar. Systemet anpassar sig till en ny lagerlayout eller förändrade krav utan några fysiska modifieringar. Detta gör dem till den ideala lösningen för mycket dynamiska miljöer som e-handel eller tredjepartslogistik (3PL), där ordervolymer och strukturer fluktuerar avsevärt.
Shuttle-system är traditionellt mycket styvare:
- Skalbarhet: Medan moderna shuttlesystem i princip är modulära och skalbara, är processen betydligt mer komplex. Ytterligare shuttles kan läggas till gångarna för att öka genomströmningen, eller så kan hela ställgångar utökas för att utöka lagerkapaciteten. Sådana utbyggnader är dock betydande byggprojekt som kräver omfattande planering, betydande investeringar och ofta en delvis eller fullständig nedstängning av verksamheten.
- Flexibilitet: Den grundläggande infrastrukturen för ställgångar, skenor och hissar är fast. En fundamental förändring av materialflödet, som att flytta en plockzon, är extremt svår och kostsam. Systemet är utformat för en specifik, optimerad process och har svårt att anpassa sig till fundamentala förändringar.
Hur skiljer sig systemen åt vad gäller kapitalutgifter (CAPEX), driftskostnader (OPEX) och implementeringstid?
Att analysera den totala ägandekostnaden (TCO) och implementeringshastigheten avslöjar fundamentalt olika affärsmodeller och är avgörande för investeringsbeslut.
- Initial investering (CAPEX):
- Shuttlesystem: Dessa innebär mycket höga initiala investeringar. Kostnaderna inkluderar inte bara själva fordonen, utan även en massiv infrastruktur bestående av högprecisionsstålkonstruktion, kraftfulla hissar, kilometerlånga transportbandstekniker och komplex styrteknik.
- AMR:er: Kräver betydligt lägre initiala investeringar. Eftersom de navigerar inom befintlig infrastruktur är dyra och komplexa modifieringar onödiga. Företag kan börja med en liten flotta på bara ett fåtal robotar och gradvis anpassa sina investeringar till företagets tillväxt ("betala-as-you-grow"). Modeller som "Robot-as-a-Service" (RaaS), där hårdvara hyrs, blir också alltmer etablerade, vilket ytterligare minskar CAPEX-tröskeln och omvandlar kostnader till rörliga driftskostnader (OPEX).
- Implementeringstid:
- Shuttlesystem: Att genomföra ett shuttleprojekt är en långdragen process som kan ta många månader eller till och med år, från planering och tillverkning till installation och driftsättning. Installation leder oundvikligen till betydande driftstörningar.
- AMR:er: Implementeringen går extremt snabbt. Efter att ha kartlagt miljön kan robotarna ofta tas i drift inom några dagar eller veckor, ofta även parallellt med pågående verksamhet. Denna snabba implementering leder till en betydligt snabbare avkastning på investeringen (ROI), som i många fall kan vara mindre än ett år.
- Driftskostnader (OPEX):
- Skyttelsystem: Tack vare sin höga effektivitet och minskade personalbehov kan de vara mycket kostnadseffektiva på lång sikt. Att underhålla det komplexa systemet kan dock vara krävande och dyrt. Moderna skyttlar är betydligt mer energieffektiva än äldre lagrings- och hämtningsmaskiner.
- AMR:er: Underhållskostnaderna per robot är relativt låga, men för en stor flotta måste den totala kostnaden för underhåll och batterihantering beaktas. Moderna litiumjonbatterier och intelligenta, automatiserade laddningscykler håller energiförbrukningen och driftsinsatsen låg.
De finansiella modellerna som ligger till grund för dessa teknologier är lika mångsidiga som deras tekniska egenskaper. Shuttle-system representerar ett traditionellt, långsiktigt, storskaligt projekt som kräver en hög grad av investeringssäkerhet och noggranna prognoser för framtida efterfrågan. AMR:er, å andra sidan, särskilt med RaaS-modeller, representerar ett paradigmskifte mot agil finansiering och operativa utgifter. De gör det möjligt för företag att se automatisering som en skalbar tjänst snarare än en bunden tillgång. Denna finansiella flexibilitet är lika omvälvande för många företag som tekniken i sig och demokratiserar tillgången till avancerad logistikautomation genom att göra det möjligt för mindre och medelstora företag att konkurrera med branschjättar.
Detaljerad jämförelse av kriterier: Shuttle-system kontra autonoma mobila robotar (AMR)
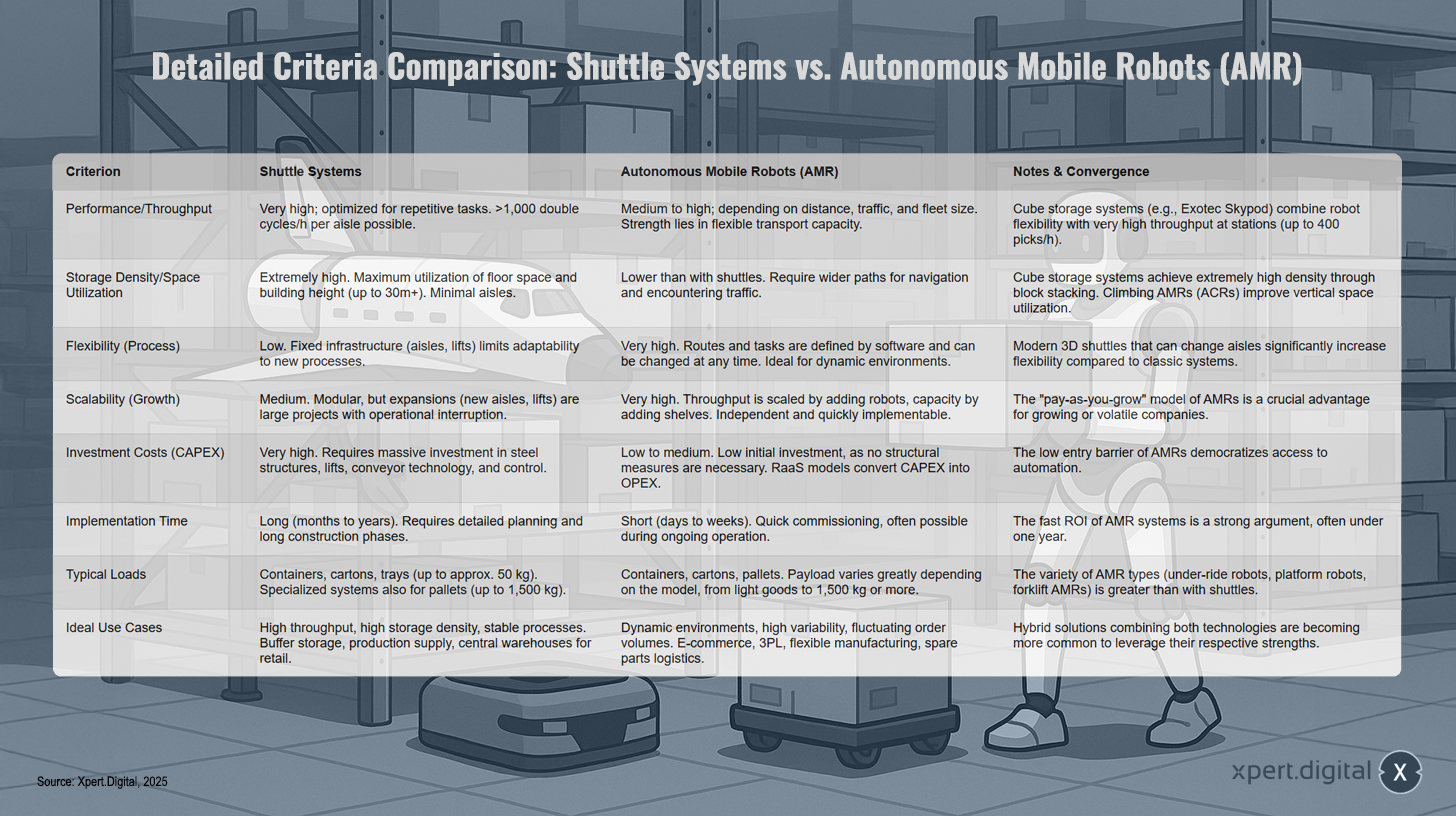
Detaljerad jämförelse av kriterier: Shuttle-system kontra autonoma mobila robotar (AMR) – Bild: Xpert.Digital
En jämförelse mellan shuttlesystem och autonoma mobila robotar (AMR) avslöjar en fascinerande utveckling inom lagerteknik. Båda systemen har sina specifika styrkor och svagheter, vilka måste vägas olika beroende på tillämpning.
Shuttlesystem utmärker sig med en extremt hög genomströmning på över 1 000 dubbelcykler per timme och maximal utrymmesutnyttjande på upp till 30 meters höjd. De är idealiska för stabila, repetitiva processer med hög volym. Investeringskostnaderna är dock betydande och flexibiliteten begränsas av den fasta infrastrukturen.
Autonoma mobila robotar erbjuder däremot anmärkningsvärd processflexibilitet. Deras rutter och uppgifter kan snabbt anpassas via programvara, vilket gör dem perfekta för dynamiska miljöer. Implementeringstiden är kort och de initiala investeringarna är betydligt lägre. Moderna metoder som kublagringssystem visar redan hur båda teknikerna kan konvergera.
Valet mellan shuttle-system och AMR beror på specifika affärskrav: Shuttle-system är idealiska för hög genomströmning och lagringstäthet, medan AMR är det bättre valet för flexibilitet och snabb skalbarhet. I allt större utsträckning väljer företag också hybridlösningar för att kombinera fördelarna med båda teknikerna.
Hjärnan i verksamheten – programvara, styrning och integration
Vilken roll spelar programvaran i styrningen av shuttlesystem och hur integreras den i det befintliga IT-landskapet (WMS/WMS)?
Utan ett intelligent programlager är ett shuttlesystem bara en samling "dum metall". Dess verkliga potential frigörs endast genom dess interaktion med systemets digitala hjärna. Denna roll uppfylls vanligtvis av en kombination av lagerhanteringsprogramvara (WMS) och ett underliggande materialflödessystem (MFS) eller lagerstyrningssystem (WCS).
Programvarans uppgifter är mångsidiga och avgörande för prestanda:
- Lagerhantering: Programvaran avgör i realtid vilken lagerplats som är optimal för en nyligen ankommen artikel. Kriterier kan inkludera åtkomstfrekvens (ABC-analys), gruppering av artiklar för en order eller jämn användning av gångarna.
- Order- och sekvenshantering: Systemet tar emot ordrar från det överordnade ERP-systemet och bryter ner dem i individuella transportordrar för hårdvaran. Det säkerställer att artiklarna hämtas i optimal ordning för den efterföljande processen (t.ex. förpackning).
- Hårdvarustyrning: Programvaran är orkesterns dirigent. Den skickar specifika körkommandon till varje enskild skyttel, varje hiss och varje segment av transportbandssystemet och synkroniserar deras rörelser för att säkerställa ett smidigt och effektivt materialflöde.
- Lagerkontroll i realtid: Eftersom varje enskild rörelse registreras erbjuder systemet en kontinuerlig lagerhållning sekund för sekund. Lagernivån är 100 % transparent hela tiden.
Integrering i det befintliga IT-landskapet är nyckeln till framgång. Sömlös kommunikation mellan WMS/MFS och företagets ERP-system (Enterprise Resource Planning) är avgörande. Standardiserade gränssnitt (API:er) underlättar utbytet av orderdata, masterdata och lagerinformation för att garantera ett kontinuerligt informationsflöde från kundorder till leverans.
Varför är programvara för flotthantering oumbärlig för AMR:er och vilka intelligenta, AI-baserade funktioner erbjuder den?
Om WMS representerar den strategiska nivån som definierar "vad" och "när" för logistikprocesser, då är flotthanteringsprogramvaran den taktiska intelligensen som i realtid bestämmer "vem" och "hur" för en AMR-flotta. En enda AMR är ett verktyg; en flotta utan central hantering skulle vara rent kaos.
Programvara för flotthantering är oumbärlig och erbjuder en rad mycket intelligenta funktioner:
- Trafikhantering: I likhet med flygtrafikledningen koordinerar programvaran rutterna för alla robotar i lagret. Den förhindrar kollisioner, reglerar trafikförbudet vid korsningar och förhindrar trafikstockningar genom att dynamiskt styra trafikflödet.
- Intelligent uppgiftsallokering: När en ny transportorder tas emot från WMS, avgör flotthanteringsprogramvaran vilken robot som är bäst lämpad för uppgiften. AI-baserade algoritmer tar hänsyn till en mängd faktorer i realtid: robotarnas aktuella position, deras batteriladdningsnivå, deras aktuella arbetsbelastning och orderns prioritet.
- AI-baserad ruttplanering: Programvaran beräknar inte bara den kortaste vägen, utan den mest effektiva. Den kan förutsäga och kringgå trafikstockningar, hitta alternativa rutter när vägar är blockerade och optimera hela flottans materialflöde för att minimera transporttider.
- Integrering av kringutrustning: Moderna vagnparkschefer styr inte bara robotarna själva, utan orkestrerar även deras interaktion med omgivningen. De kan automatiskt öppna grindar, anropa hissar eller koordinera överföringen av varor till robotarmar och transportband.
- Automatisk energihantering: Programvaran övervakar laddningsnivån för varje robot och skickar den automatiskt till närmaste tillgängliga laddningsstation i god tid när batterinivån är låg, för att säkerställa drift dygnet runt.
Ett avgörande framsteg är utvecklingen av tillverkaroberoende kommunikationsstandarder som VDA 5050. Flottans chefer som stöder denna standard kan styra heterogena flottor av fordon från olika tillverkare. Detta ger företag friheten att välja den bästa roboten för varje uppgift och förhindrar långsiktigt beroende av en enda leverantör ("leverantörslåsning").
Vilka är de största utmaningarna med att uppnå interoperabilitet och sömlös integration av dessa komplexa system i befintliga operativa processer?
Att implementera avancerade automationslösningar är ett komplext åtagande som sträcker sig långt bortom ren teknologi. Utmaningarna kan delas in i tekniska och organisatoriska aspekter.
- Tekniska utmaningar:
- Systemkompatibilitet och gränssnitt: Det största tekniska hindret är att säkerställa sömlös kommunikation mellan de olika programvarulagren: ERP, WMS, MFS och flotthantering. Detta kräver ofta användning av speciell mellanprogramvara eller komplex utveckling av anpassade applikationsprogrammeringsgränssnitt (API:er) för att systemen ska kunna kommunicera med varandra.
- Dataharmonisering: Dataformat och protokoll måste korrekt "översättas" och standardiseras mellan system (datamappning) så att en order från ERP-systemet i slutändan leder till en korrekt fysisk förflyttning i lagret.
- Nätverksinfrastruktur: AMR:er är i synnerhet beroende av en extremt stabil, omfattande och högpresterande Wi-Fi-anslutning. I många befintliga lagerlokaler är nätverket inte utformat för dessa krav och kräver kostsamma uppgraderingar.
- Säkerhet: Integrationen måste garantera både fysisk och digital säkerhet. Detta inkluderar anslutning till befintliga säkerhetssystem som nödstoppskretsar och brandskyddssystem, samt att säkra hela nätverket mot cyberattacker som kan lamslå en hel maskinpark.
- Organisatoriska utmaningar:
- Medarbetaracceptans och förändringsledning: Införandet av robotar kan utlösa rädsla för arbetsförlust bland arbetskraften. Ett framgångsrikt projekt kräver därför en öppen kommunikationsstrategi, tidigt medarbetarmedverkan och omfattande utbildningsprogram för att utveckla nya färdigheter för att arbeta med maskinerna (t.ex. övervakning av fordonsflottan, underhåll).
- Processomstrukturering: Den största avkastningen på investeringen uppnås inte genom att bara ersätta en människa med en maskin. Sann framgång ligger i att fundamentalt omforma hela processkedjan för att fullt ut utnyttja automatiseringens unika möjligheter. Detta kräver ett nytänkande kring arbetsflöden, prestandamått och ledningsfilosofier.
- Initial investering: Trots fördelarna utgör kostnaderna, särskilt för omfattande shuttlesystem, ett betydande hinder för många medelstora företag. Strategier som att börja med små pilotprojekt, gradvis skalning eller användning av RaaS-finansieringsmodeller kan hjälpa till att övervinna detta hinder.
Erfarenheten visar att de största utmaningarna ofta inte är tekniska, utan organisatoriska. Ett automatiseringsprojekt är inte bara ett IT-projekt, utan ett djupgående affärstransformationsprojekt. Företag som bara försöker "koppla in" ny teknik i gamla, manuella processer kommer inte att förverkliga dess fulla potential. Vinnarna blir de som använder tekniken som en katalysator för att återuppfinna hela sin verksamhetsmodell.
🎯🎯🎯 Dra nytta av Xpert.Digitals omfattande, femfaldiga expertis i ett heltäckande tjänstepaket | BD, R&D, XR, PR och optimering av digital synlighet

Dra nytta av Xpert.Digitals omfattande, femfaldiga expertis i ett heltäckande tjänstepaket | FoU, XR, PR och optimering av digital synlighet - Bild: Xpert.Digital
Xpert.Digital har djup kunskap i olika branscher. Detta gör att vi kan utveckla skräddarsydda strategier som är anpassade efter kraven och utmaningarna för ditt specifika marknadssegment. Genom att kontinuerligt analysera marknadstrender och bedriva branschutveckling kan vi agera med framsyn och erbjuda innovativa lösningar. Med kombinationen av erfarenhet och kunskap genererar vi mervärde och ger våra kunder en avgörande konkurrensfördel.
Mer om detta här:
Skyttlar kontra AMR – Hybridsystem: Nyckeln till logistisk framgång under nästa decennium?
Marknad, aktörer och framtida trender
Hur ser det nuvarande marknadslandskapet ut och vilka tillväxtprognoser finns för lagerautomation?
Marknaden för lagerautomation upplever explosionsartad tillväxt, driven av de oåterkalleliga trenderna inom e-handel, omnikanalhandel och den globala arbetskraftsbristen. Uppgifterna ger en tydlig bild av en bransch på uppgång:
- Marknadsstorlek och tillväxt: Den globala marknaden uppskattades nå en volym på 26,5 miljarder USD år 2024. Prognoser förutspår en imponerande genomsnittlig årlig tillväxttakt (CAGR) på över 15,9 % för perioden fram till 2034. Specifikt för Europa förväntas tillväxten från 4,9 miljarder USD år 2024 till 9,59 miljarder USD år 2029, vilket motsvarar en genomsnittlig årlig tillväxttakt på 14,4 %. Liknande dynamik är tydlig i Nordamerika, där den amerikanska marknaden förväntas mer än fördubblas till 2030.
- Marknadspenetration: Trots dessa imponerande tillväxtsiffror är potentialen långt ifrån uttömd. Det uppskattas att endast cirka 5 % av lagren världen över är högt automatiserade idag. Ytterligare 15 % använder partiella lösningar som transportband, medan den överväldigande majoriteten på 80 % fortfarande till stor del är manuellt drivna. Denna låga automatiseringsnivå signalerar en enorm framtida tillväxtpotential för tekniker som shuttlesystem och AMR-system.
- Regionala fokusområden: Europa, och Tyskland i synnerhet, har en av de högsta robottätheterna i världen och är en hotspot för OEM-företag och systemintegratörer. Samtidigt anses Central- och Östeuropa vara snabbt växande framtida marknader. I USA, särskilt inom det stora segmentet av medelstora företag, finns det ett betydande behov av att komma ikapp inom automatisering, vilket också driver stark tillväxt där.
Lämplig för detta:

Vilka företag är de ledande leverantörerna av shuttle- och AMR-system?
Konkurrenslandskapet är heterogent. Inom shuttlesystemsektorn dominerar stora, etablerade intralogistikleverantörer, som ofta erbjuder kompletta nyckelfärdiga lösningar. AMR-marknaden är mer dynamisk och fragmenterad, med en blandning av etablerade industriföretag och högspecialiserade, agila robotstartups.
- Ledande leverantörer av shuttlesystem (ofta som en del av helhetslösningar):
- DAIFUKU (Japan)
- SSI Schäfer (Tyskland)
- Dematic (en del av Kion-gruppen, Tyskland)
- KNAPP (Österrike)
- TGW Logistics Group (Österrike)
- Vanderlande (del av Toyota Industries, Nederländerna)
- Mecalux (Spanien)
- Swisslog (del av KUKA AG, Schweiz)
- WITRON Logistik + Informatik (Tyskland)
- Ledande leverantörer av AMR-system (urval efter specialisering):
- Gods-till-person / Klätterrobotar: Exotec (Frankrike), Geek+ (Kina), Hai Robotics (Kina).
- Person-till-gods / Samarbetande robotar: Locus Robotics (USA), mobila industrirobotar (MiR, en del av Teradyne, Danmark).
- Industrial AMRs & Fleet Management: KUKA (Tyskland), ABB (Schweiz/Sverige), DS AUTOMOTION (del av SSI Schäfer, Österrike).
Sammantaget bedöms marknadskoncentrationen som "medel", vilket indikerar sund och innovationsdriven konkurrens mellan aktörerna.
Vilka tekniska trender, som hybridsystem, AI och cobotar, kommer att forma nästa generations lagersystem?
Utvecklingen inom lagerautomation är i ständig förändring. Flera viktiga trender kommer att definiera nästa generations system och ytterligare tänja på gränserna för vad som är möjligt idag.
- Hybridsystem och konvergens: Den strikta separationen mellan olika systemvärldar håller på att upplösas. Framtiden tillhör integrerade, hybridlösningar som intelligent kombinerar sina respektive styrkor. Ett typiskt scenario innebär att man använder ett högdensitets shuttle- eller kublagersystem för lagerhållning och ansluter det till flexibla automatiserade styrda fordon (AGV) för att transportera varor till decentraliserade, ergonomiska plockstationer eller mellan olika lager- och produktionsområden. Detta undviker styv transportbandsteknik och maximerar både densitet och flexibilitet.
- Allestädes närvarande artificiell intelligens (AI) och maskininlärning (ML): AI utvecklas från en nischfunktion till en integrerad del av den övergripande lagerhanteringen. Utöver enkel ruttplanering för automatiskt styrda fordon (AGV) används den för global processoptimering: prediktiv analys för att prognostisera efterfrågetoppar och proaktivt justera resurser, intelligent lageroptimering som dynamiskt flyttar artiklar baserat på förutspådda ordrar och adaptiva inlärningsalgoritmer som kontinuerligt förbättrar det övergripande systemet genom att analysera driftsdata.
- Samarbete mellan människa och robot och cobotar: Människor kommer inte att försvinna från lagret, men deras roll kommer att flyttas från manuellt arbete till övervakning, styrning och problemlösning. Samarbetande robotar (cobotar) och automatiskt styrda fordon (AGV) utvecklas för att arbeta säkert och effektivt tillsammans med människor. Ergonomiska arbetsstationer med "varor till person" eller "varor till robot", där människor och maskiner plockar order hand i hand, håller på att bli standard.
- Sakernas internet (IoT) och total uppkoppling: Framtidens lager är helt nätverksanslutet. Sensorer i hyllor, på maskiner, på robotar och till och med på själva lastenheterna levererar en konstant ström av realtidsdata. Denna data används av AI-system för att skapa en digital tvilling av lagret och för att styra och optimera fysiska processer med oöverträffad precision.
- Hållbarhet och energieffektivitet: Mot bakgrund av stigande energikostnader och samhällstryck blir hållbarhet ett avgörande designkriterium. System med låg energiförbrukning, såsom AutoStores robotar som kan förse varandra med energi, eller energieffektiva shuttle-drivningar, blir allt viktigare. Att främja den cirkulära ekonomin genom optimerade returprocesser blir också en viktig aspekt.
Framtida trender inom intralogistik och deras inverkan
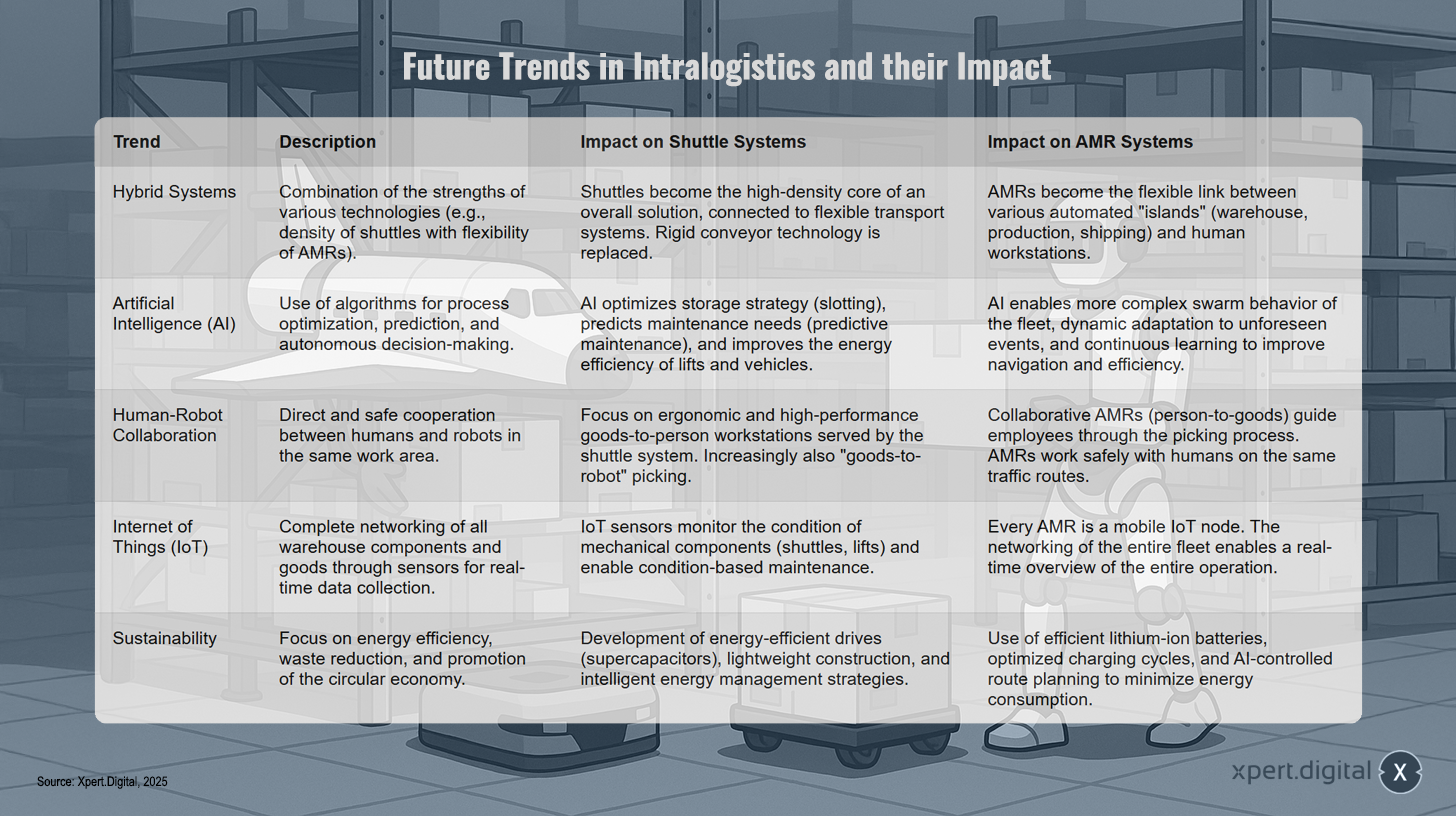
Framtida trender inom intralogistik och deras inverkan – Bild: Xpert.Digital
Framtiden för intralogistik kommer att formas av flera betydande trender som kommer att revolutionera prestandan och effektiviteten hos logistiksystem. Hybridsystem representerar en nyckelstrategi som kombinerar styrkorna hos olika teknologier. Shuttlesystem kommer att utgöra den högdensitetskärnan i en heltäckande lösning, medan autonoma mobila robotar (AMR) kommer att fungera som en flexibel länk mellan olika automatiserade områden.
Artificiell intelligens (AI) spelar en nyckelroll i processoptimering. Den möjliggör inte bara förbättrade lagerhanteringsstrategier och prediktivt underhåll, utan även mer komplext svärmbeteende från robotflottor. Samarbete mellan människa och robot blir en avgörande aspekt, där robotar arbetar säkert och ergonomiskt tillsammans med mänskliga anställda.
Sakernas internet (IoT) kopplar samman alla lagerkomponenter i realtid och skapar omfattande transparens. Varje robot blir en mobil datahubb som utbyter och analyserar information. Samtidigt blir hållbarhet allt viktigare. Energieffektiva drivsystem, optimerade batteritekniker och AI-driven ruttplanering syftar till att minimera det ekologiska fotavtrycket inom intralogistik.
Dessa trender visar att intralogistikens framtid kommer att präglas av nätverkande, intelligens och hållbarhet, där människor och teknik samarbetar allt närmare.
Samexistens istället för konkurrens – Vilket system kommer att dominera framtiden?
Kommer det ena systemet därför att ersätta det andra, eller rör vi oss mot en framtid av samexistens och hybridlösningar?
Efter en djupgående analys av teknologierna, deras prestandaegenskaper, kostnadsstrukturer och framtida trender blir en sak tydlig: frågan om "shuttle kontra robot" är felaktigt ställd om den antyder att ett system kommer att ersättas av ett annat. Idén om en enda, helt dominerande teknologi är en kvarleva från en enklare tid. Framtiden för lagerautomation kommer inte att formas av en enda vinnare, utan av en intelligent, applikationsspecifik samexistens och en ökande konvergens av teknologier.
Det kommer inte att ske någon fullständig förskjutning. Istället kommer systemen att dominera inom de tillämpningsområden där deras respektive kärnstyrkor bäst utnyttjas:
- Shuttlesystem (och deras vidareutvecklingar som kublagring) kommer att fortsätta att dominera där maximal lagringstäthet och extremt hög, förutsägbar genomströmning är de avgörande kriterierna. Detta gäller buffertlagring inom industrin, leverans av högpresterande produktionslinjer, stora centrallager inom livsmedelshandeln eller för snabbrörliga artiklar inom e-handelshantering.
- Autonoma mobila robotar (AMR) kommer att visa sin dominans inom alla områden där flexibilitet, snabb skalbarhet och anpassningsförmåga till dynamiska processer är av största vikt. Dessa inkluderar volatila e-handelsmiljöer med mycket fluktuerande orderprofiler, tredjepartslogistik (3PL) med ofta föränderliga kunder och krav, samt flexibla, modulära produktionskoncept.
Den viktigaste och mest utpräglade trenden är dock konvergensen av teknologier och framväxten av hybridsystem. Framtidens mest effektiva logistikcenter kommer inte att förlita sig på vare sig shuttles eller AMR, utan snarare på integrerade, heltäckande lösningar som kombinerar det bästa av två världar. Dominans kommer därför inte att utövas av en specifik hårdvaruteknik. Den verkliga vinnaren i kapplöpningen om intralogistikens framtid är mjukvaruekosystemet. Den intelligens som kan sömlöst orkestrera heterogena teknologier – shuttles, AMR, cobotar, transportbandsteknik och manuella arbetsstationer – till en mycket effektiv, flexibel och motståndskraftig helhet kommer att representera den avgörande konkurrensfördelen.
Industrins framtid kommer att domineras av intelligenta, flexibla och hybrida automationsekosystem, där valet av rätt hårdvara för den specifika uppgiften och dess perfekta integration genom överlägsen programvara kommer att avgöra framgång.

Xpert.Plus Lageroptimering - Höglager och palllager: Konsultation och planering
Vi är där för dig - Råd - Planering - Implementering - Projektledning
☑ Vårt affärsspråk är engelska eller tyska
☑ Nytt: korrespondens på ditt nationella språk!

Konrad Wolfenstein
Jag är glad att vara tillgänglig för dig och mitt team som personlig konsult.
Du kan kontakta mig genom att fylla i kontaktformuläret eller helt enkelt ringa mig på +49 89 674 804 (München) . Min e -postadress är: Wolfenstein ∂ xpert.digital
Jag ser fram emot vårt gemensamma projekt.

















