
Тиха револуција тешких робота у машинству: Зашто вештачка интелигенција сада одлучује о судбини најмоћнијих робота
Xpert прелиминарно издање

Избор језика 📢
Објављено: 18. августа 2025. / Ажурирано: 18. августа 2025. – Аутор: Konrad Wolfenstein
Тиха револуција тешких робота у машинству: Зашто је вештачка интелигенција сада одлучујући фактор за најмоћније роботе – Creative image Xpert.Digital
Моћнији него икад пре – а сада и паметнији: Ово је оно што нови супер роботи заиста могу
### Заборавите фабрички погон: Ови роботски гиганти сада освајају градилишта и ветроелектране ### Више нису потребни кавези: Како роботи тешки више тона постају безбедни саиграчи за људе ### Одговор на недостатак квалификоване радне снаге? Ови роботи преузимају најтеже послове на свету ### Сукоб титана: Не снага, већ софтвер одлучује ко ће направити најбољег робота ###
Еволуција снаге: Најновији развој високоперформансних робота за тешке услове рада
Сектор робота за тешке услове рада пролази кроз дубоку трансформацију која се протеже далеко изван пуког повећања носивости и домета. Најновији развој догађаја показује промену парадигме ка холистичком приступу који даје приоритет интелигенцији, прилагодљивости, једноставности коришћења и развоју нових апликација. Софтвер, вештачка интелигенција (ВИ) и напредна мехатроника постали су главни покретачи вредности, омогућавајући овим моћним машинама да се носе са сложеним задацима у динамичним окружењима, често у директној сарадњи са људским радницима. Кључни трендови укључују све веће замагљивање граница између традиционалних индустријских робота и колаборативних система (кобота), ширење у секторе као што су грађевинарство и обновљиви извори енергије, и све већи значај укупних трошкова власништва (TCO) и одрживости. Ови развоји дефинишу следећу генерацију робота за тешке услове рада, који су не само јачи већ, што је још важније, паметнији, флексибилнији и приступачнији.
Нова генерација робота за тешке услове рада: Редефинисање снаге и прецизности
Тржиште робота за тешке услове рада еволуира од чисте конкуренције за максималну носивост ка диверзификованом пејзажу где перформансе и ефикасност специфичне за примену заузимају централно место. Водећи произвођачи разликују своје производе комбинацијом снаге, брзине, компактности и интелигентног дизајна.
Дефиниција модерне класе тешких возила: Више од пуке снаге
Роботи за тешке услове рада су дизајнирани да рукују теретима који обично почињу од 250 кг и/или захтевају домет од преко 4 метра. Они чине окосницу индустрија као што су аутомобилска производња, машинство, ливнице и све више грађевинарство, где померају масивне компоненте попут блокова мотора, челичних греда и целих каросерија возила. Распон капацитета носивости је огроман, протеже се од неколико стотина килограма до тренутног врхунца од 2.300 кг.
Међутим, евалуација модерних робота велике снаге је еволуирала. Иако максимални носиви терет остаје кључни критеријум, холистичке метрике ефикасности све више долазе у фокус. То укључује однос носивости и тежине, потребну површину, потрошњу енергије и способност прецизног и динамичког руковања теретима са високим моментима инерције. Ови критеријуми одражавају дубље разумевање укупних трошкова власништва и захтева модерних, флексибилних производних окружења.
Конкурентно окружење и водећи модели (2024-2026)
Тржиштем доминирају етаблирани играчи као што су KUKA, Fanuc, ABB и Yaskawa, док нови конкуренти попут Estun-а из Кине добијају на значају. Стратегије ових компанија показују значајну дивергенцију која иде даље од пуког максимизирања капацитета терета.
Фанук остаје неспорни лидер на тржишту у сегменту ултра-тешких машина са својом серијом М-2000iA. Модел М-2000iA/2300, са носивошћу од 2,3 тоне, је најмоћнији 6-осни зглобни робот на свету и идеалан је за задатке који захтевају апсолутну максималну снагу, као што је подизање комплетних шасија возила.
КУКА следи стратегију оптимизованих перформанси. Иако серија KR FORTEC ultra нуди капацитет подизања до 800 кг, карактерише је изузетно добар однос носивости и тежине и компактан дизајн. То се постиже иновативним карактеристикама дизајна као што је систем са две руке, који повећава крутост без претераног повећања тежине. За примене палетизације, серија KR 1000 titan нуди моделе са капацитетом подизања до 1.300 кг.
АББ позиционира свој водећи робот IRB 8700 као најбржег робота у својој класи. Са носивошћу до 800 кг (или 1.000 кг са нагнутим зглобом), наводно постиже време циклуса 25% брже од упоредивих модела. АББ такође наглашава његову поузданост кроз поједностављени механички дизајн са само једним мотором и мењачем по оси, што смањује одржавање и смањује укупне трошкове власништва.
Јаскава нуди широк портфолио који укључује Мотоман МХ600 са носивошћу од 600 кг. Његов дизајн са паралелним зглобовима обезбеђује високу стабилност и крутост, што је посебно предност при руковању радним предметима са високим моментом инерције. Серија ГП је дизајнирана за примене великим брзинама.
Нови конкуренти попут Естуна и Кавасакија такође улазе на тржиште. Естун, највећи кинески произвођач индустријских робота, планира да лансира моделе попут ER 13300 са носивошћу од 1.000 кг у Европи. Кавасаки проширује свој портфолио са MXP710L (710 кг) и М-серијом, која може да поднесе терет до 1.500 кг.
Ови различити приступи показују да је тржиште робота за тешке услове рада еволуирало од једнодимензионалне трке за највећим носивошћу до диференциранијег конкурентског окружења. Произвођачи се сада такмиче на основу специјализованих карактеристика перформанси прилагођених специфичним захтевима купаца – било да је то максимална сила, ефикасност у ограниченим просторима или максимална брзина. Ово омогућава корисницима да изаберу решење оптимизовано за њихове индивидуалне производне услове, уместо да се једноставно одлуче за најмоћнији доступни модел.
Роботски гиганти: Поређење најмоћнијих индустријских робота
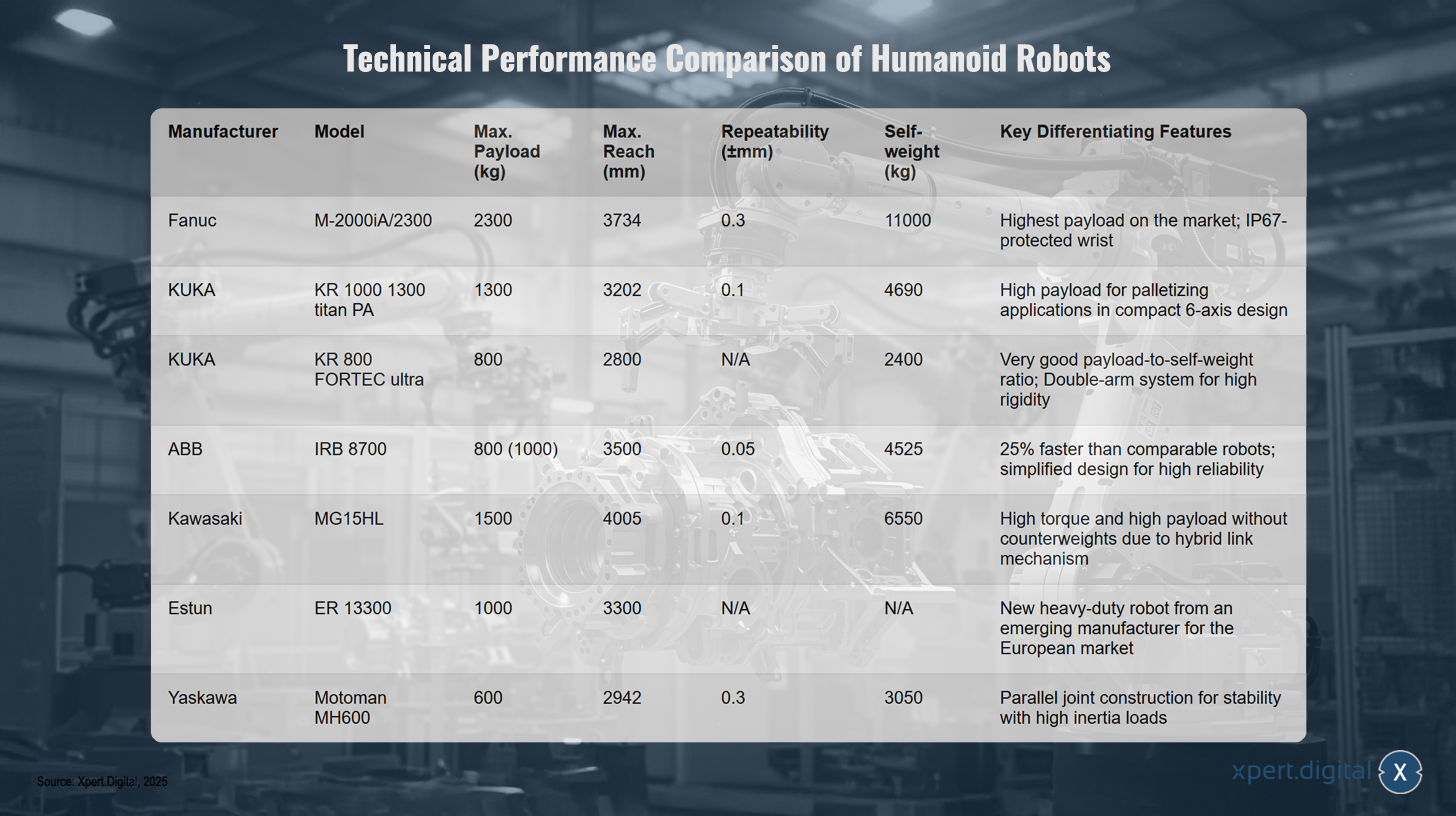
Роботски гиганти: Поређење најмоћнијих индустријских робота – Слика: Xpert.Digital
У свету индустријских робота, постоје неки импресивни гиганти који се истичу због свог огромног капацитета носивости и техничких спецификација. Произвођачи као што су Fanuc, KUKA, ABB, Kawasaki, Estun и Yaskawa се такмиче за водећу позицију у овом сегменту тржишта.
Фанук М-2000иА/2300 се истиче својим изузетним капацитетом носивости од 2300 кг и такође има зглоб заштићен IP67. КУКА представља KR 1000 1300 титан ПА, робота са капацитетом носивости од 1300 кг, идеалног за палетизирање и који се може похвалити компактним 6-осним дизајном. АББ ИРБ 8700 осваја поене 25% већом брзином у поређењу са сличним моделима и поједностављеним дизајном за максималну поузданост.
Кавасакијев MG15HL користи хибридни механизам везе који омогућава висок обртни момент и носивост без додатних противтегова. Јаскава Мотоман MH600 импресионира својим дизајном паралелне везе, што гарантује стабилност под оптерећењима са високим моментима инерције.
Занимљив нови модел је Estun ER 13300, робот велике снаге који циља да освоји европско тржиште. Ови роботи импресивно демонстрирају технолошки напредак у индустријској аутоматизацији и континуиране иновације водећих произвођача.
Интелигенцијски мотор: вештачка интелигенција и софтвер као кључне карактеристике које га разликују
Најзначајнији напредак у тешким роботима више није искључиво механичке природе. Уместо тога, то је фузија роботике са вештачком интелигенцијом и напредним софтвером која фундаментално проширује могућности ових машина и револуционише њихов рад.
Од аутоматизације до аутономије: Утицај вештачке интелигенције и машинског учења
Вештачка интелигенција и машинско учење (МУ) трансформишу индустријске роботе од крутих, унапред програмираних алата у адаптивне, интелигентне системе способне да опажају, одлучују и уче. Ова трансформација је кључна за управљање варијабилношћу и сложеношћу у модерним производним и логистичким процесима.
Напредна перцепција („очи“)
Модерни роботи више не раде слепо. Опремљени су високо софистицираним сензорским системима, укључујући 2Д и 3Д системе вида, LiDAR и стерео камере, који им пружају свеобухватно разумевање њиховог окружења. Ова перцептивна способност је вођена алгоритмима дубоког учења за препознавање, локализацију и сегментацију објеката, што омогућава њихову употребу у неструктурираним окружењима.
Примена – Снимање из контејнера: Системи попут KUKA.SmartBinPicking користе напредну обраду слика да би идентификовали насумично распоређене објекте у контејнеру, одредили њихове тачке хватања и безбедно их уклонили – задатак који је практично немогућ са традиционалним програмирањем заснованим на правилима.
Случај употребе – Детекција градилишта: Истраживања активно развијају моделе препознавања објеката засноване на YOLO (You Only Look Once - Погледај само једном). Они омогућавају роботима да идентификују раднике, возила и грађевинске конструкције на динамичним градилиштима, што је основни захтев за аутономни рад у тако сложеним окружењима.
Интелигентно руковање задацима („мозак“)
Вештачка интелигенција не служи само за гледање, већ и за деловање. Модели машинског учења омогућавају роботима да прилагоде своје радње променљивим условима у реалном времену.
Пример употребе – депалетизирање помоћу вештачке интелигенције: FANUC користи системе вида контролисане вештачком интелигенцијом како би омогућио роботима да аутономно истоварују мешовите палете са различитим величинама и положајима картона. Такви системи могу да обраде преко девет картона у минути, чиме замењују изузетно напоран ручни рад.
Примена – Заваривање уз помоћ вештачке интелигенције: Системи следеће генерације, као што је NovAI™, користе машински вид и вештачку интелигенцију за адаптивно заваривање у реалном времену. Они могу да прате заварене шавове, прилагођавају се димензијама размака и тачним заваривањима, као и да динамички исправљају параметре заваривања. Ово аутоматизује процесе који су се раније сматрали превише недоследним за роботику због толеранција компоненти и представља значајан напредак за тешку конструкцију у индустријама као што је бродоградња.
Револуција у једноставности коришћења: поједностављивање сложености кроз напредни софтвер
Традиционално, програмирање индустријских робота био је високо специјализован задатак који је захтевао дубинско познавање власничких програмских језика као што су KRL (KUKA) или RAPID (ABB). То је представљало велику препреку за улазак и успорило имплементацију решења за аутоматизацију.
Оперативни системи следеће генерације
Водећи произвођачи реагују на ово уско грло развојем нових, интуитивних оперативних система дизајнираних да демократизују рад робота.
KUKA iiQKA.OS: Модерни оперативни систем базиран на Линуксу са веб корисничким интерфејсом (iiQKA.UI) дизајниран да буде једноставан за коришћење као паметни телефон. Подржава програмирање засновано на инструкцијама, омогућава виртуелно пуштање у рад и дизајниран је да подстиче читав екосистем апликација и хардвера трећих страна („Роботска Република“).
FANUC iHMI: „Интелигентни интерфејс човек-машина“ је графички кориснички интерфејс заснован на екрану осетљивом на додир, дизајниран да драстично смањи време подешавања и обуке. Он интегрише алате за планирање, уређивање и побољшање, као што су процена времена циклуса и управљање одржавањем, у један, кориснички интерфејс.
Демократизација програмирања
Тренд се очигледно креће ка интеракцији без кода или са мало кода. Визуелна програмска окружења са функционалношћу превлачења и испуштања и графичким уређивачима тока посла постају стандард. Методе „подучавања демонстрацијом“, где оператер ручно води роботску руку кроз покрет (ручно вођење) или користи спољне алате попут Wandelbots Tracepen-а да би „демонстрирао“ задатак роботу, додатно смањују програмерску баријеру.
Моћ симулације (дигитални близанци)
Софтвер за офлајн програмирање и симулацију као што су KUKA.Sim или ABB RobotStudio постао је незаобилазан алат. Омогућава компанијама да виртуелно пројектују, тестирају и оптимизују комплетне роботске ћелије чак и пре него што наруче физички хардвер. Ово „виртуелно пуштање у рад“ значајно смањује стварно време подешавања, минимизира ризике раним откривањем судара или проблема са приступачношћу и омогућава да се програмирање обавља паралелно са набавком хардвера.
Ови развоји указују на фундаменталну промену у роботици. Произвођачи више не продају само роботску руку са контролером, већ граде читаве дигиталне платформе. Ове платформе укључују оперативне системе, продавнице апликација, партнерске мреже и повезивање са облаком. KUKA активно промовише партнерски екосистем („Robotic Republic“) за iiQKA са отвореним интерфејсима за добављаче трећих страна. Истовремено, платформе попут Bosch Rexroth-овог ctrlX AUTOMATION омогућавају контролу робота различитих брендова (ABB, KUKA, FANUC) путем јединственог интерфејса. Овај развој одражава трансформацију на тржишту паметних телефона, где вредност уређаја у великој мери одређује његов екосистем апликација. Конкурентско окружење се стога помера са чисто хардверских спецификација на снагу и отвореност софтверског екосистема. За кориснике то значи мању зависност од једног произвођача, брже иновације и приступ ширем спектру специјализованих решења. Робот постаје хардверска платформа на којој се гради софтверски дефинисано решење за аутоматизацију.
🎯🎯🎯 Искористите предности Xpert.Digital-овог опсежног, петоструког стручног знања у једном свеобухватном пакету услуга | BD, R&D, XR, PR и оптимизација дигиталне видљивости

Искористите предности Xpert.Digital-овог опсежног, петоструког стручног знања у свеобухватном пакету услуга | Истраживање и развој, XR, односи с јавношћу и оптимизација дигиталне видљивости - Слика: Xpert.Digital
Xpert.Digital поседује дубинско знање у различитим индустријама. То нам омогућава да развијемо прилагођене стратегије прецизно усклађене са захтевима и изазовима вашег специфичног тржишног сегмента. Континуираном анализом тржишних трендова и праћењем развоја у индустрији, можемо деловати проактивно и понудити иновативна решења. Комбинација искуства и стручности ствара додатну вредност и пружа нашим клијентима одлучујућу конкурентску предност.
Више информација овде:
Нова мехатроника: Како тешки роботи превазилазе физичке границе
Напредна мехатроника: Физичка еволуција моћи
Уз брзи напредак софтвера и вештачке интелигенције, развија се и физички облик робота велике снаге. Иновације у дизајну, науци о материјалима и технологији крајњих ефектора су кључне за претварање ове повећане интелигенције у механичке перформансе.
Иновације у дизајну и материјалима: Више перформанси са мањом масом
Кључни тренд је развој робота који су лакши и компактнији, а истовремено нуде исти или чак већи капацитет носивости. KUKA KR Fortec, на пример, је до 700 кг лакши од свог претходника, док се KR FORTEC ultra серија може похвалити односом носивости и тежине, водећим у класи. Ово смањење тежине смањује захтеве за темеље, смањује потрошњу енергије и омогућава примену у густо насељеним и просторно ограниченим производним погонима.
Ово је омогућено захваљујући напредним кинематичким концептима. КУКА-ов систем са две руке и Фануков изузетно крути дизајн руке побољшавају прецизност и смањују вибрације при великим брзинама и са великим оптерећењима. Кавасакијев хибридни механизам везе елиминише потребу за гломазним противтеговима, чиме се повећава радни простор робота.
Још један важан аспект је модуларност. Серије робота попут оних компаније KUKA (KR Quantec, Fortec, Fortec ultra) све више деле заједничке компоненте, као што су централне руке. Ово поједностављује одржавање и смањује трошкове резервних делова за купце који управљају диверзификованом флотом робота.
За употребу у екстремним условима, специјализоване варијанте као што су верзије „Ливница“ или „Хигијенска“ сада су стандардне. Ови модели имају зглобове и кућишта заштићене IP67 степеном, премазе отпорне на топлоту и корозију и мазива прехрамбене класе, што омогућава њихову употребу у ливницама, ковачницама или постројењима за прераду хране.
Крајњи ефектори следеће генерације: Роботске руке
Хватачи на крају роботске руке, познати као крајњи ефектори, развијају се од једноставних пнеуматских стезаљки до сложених мехатронских система. Све више су опремљени напредним сензорима који пружају адаптивну функционалност. Иако се и даље претежно налазе у применама са мањим корисним теретом, принципи меке роботике и бионике утичу на технологију хватаљки. Циљ је руковање већим бројем облика и материјала објеката са већом поузданошћу и мањом силом. За тешке и сложене објекте развијају се вишеосни, потпуно погонски механизми који омогућавају прецизну манипулацију.
Сензори силе и обртног момента постављени на зглоб дају роботу „осећај додира“. Они му омогућавају да обавља деликатне задатке као што су прецизно спајање компоненти, примена дефинисане силе током брушења или безбедно реаговање на неочекиване сударе.
Сензорски екосистем: основа за перцепцију и безбедност
Модерни роботи велике снаге ослањају се на богат екосистем интерних и екстерних сензора. Интерни сензори, као што су енкодери мотора и сензори обртног момента у зглобовима, су неопходни за прецизну контролу кретања. Екстерни сензори, као што су 3Д камере, ЛиДАР и ултразвучни сензори, пружају податке за перцепцију окружења и омогућавају безбедну сарадњу човека и робота. Интегрисани системи заштите од судара и преоптерећења могу покренути хитно заустављање у случају судара или прекомерног оптерећења, чиме штите и робота и радни предмет. Ови системи постају све софистициранији и сада нуде функције као што су пнеуматски подесиви прагови окидача.
Одрживост и ефикасност: Фокус на укупним трошковима власништва (TCO)
Енергетска ефикасност је постала кључни циљ дизајна. Захваљујући лаганој конструкцији, софтверски оптимизованим путањама кретања и енергетски штедљивим режимима приправности, произвођачи смањују потрошњу енергије својих робота. Ово не само да смањује оперативне трошкове већ и побољшава еколошки отисак решења за аутоматизацију. Поједностављени механички дизајни, попут оних које спроводи АББ са само једним мотором по оси, и модуларна конструкција доводе до веће поузданости (средње време између кварова, MTBF) и бржег времена поправке (средње време за поправку, MTTR), што додатно смањује укупне оперативне трошкове.
Напредак у мехатроници је уско испреплетен са развојем софтвера и вештачке интелигенције. Чвршћа, мање вибрацијама подложна структура руке (побољшање хардвера) је предуслов за напредни софтвер за контролу кретања (побољшање софтвера) како би се роботу омогућило брже и прецизније кретање. Алгоритми за планирање путање засновани на вештачкој интелигенцији затим могу израчунати енергетски најефикаснију путању управо за ову кинематику. Интегрисани сензори силе и обртног момента, заузврат, пружају повратне информације у реалном времену, омогућавајући софтверу за контролу да реагује на непредвиђене силе и учини процес робуснијим. Перформансе модерног робота за тешке услове рада су стога ново својство целокупног система, у коме су механика, сензори и софтвер нераскидиво повезани.
Проширени хоризонти: Нова поља примене за роботику тешких услова рада
Технолошки напредак у вештачкој интелигенцији, софтверу и мехатроници омогућава употребу робота велике снаге у индустријама које су се раније ослањале на ручни рад или круту аутоматизацију. Роботи напуштају контролисане фабричке погоне и освајају динамична и неструктурирана окружења.
Аутоматизовано градилиште
Грађевинска индустрија се суочава са огромним изазовима због недостатка квалификованих радника, високих безбедносних ризика и све већег притиска на продуктивност. Као резултат тога, 81% грађевинских компанија планира да уведе роботе у наредних десет година.
Примене: Тешки роботи рукују масивним компонентама као што су челични профили, префабриковани бетонски елементи и модуларне кућишне јединице. Користе се за аутоматизовану производњу, на пример, за бушење, закивање и причвршћивање великих компоненти. Конкретан пример је Fischer BauBot, који је развијен посебно за радове бушења и анкерисања на великим градилиштима. Роботи такође могу бити опремљени алатима за сечење за обраду бетонских и челичних компоненти на лицу места са високом прецизношћу.
Кључне технологије: Успех у овом неструктурираном окружењу критично зависи од препознавања објеката заснованог на вештачкој интелигенцији за идентификацију материјала и препрека, као и од робусних, мобилних платформи.
Енергија за будућност: Аутоматизација у производњи обновљивих извора енергије
Масовно ширење обновљивих извора енергије захтева бржу и исплативију производњу и инсталацију великих компоненти као што су лопатице ветротурбина и соларне електране.
Енергија ветра: У производњи лопатица ветротурбина, роботи се користе за накнадну обраду (обрезивање, брушење, пуњење), што побољшава квалитет и ослобађа раднике опасних задатака. Код аутоматизованог постављања влакана (AFP), роботске руке прецизно постављају траке од угљеничних или стаклених влакана како би произвеле лакше и јаче лопатице ротора. Специјални роботски системи обрађују корен лопатице (тестерисање, глодање, бушење) и смањују време циклуса до 50% у поређењу са конвенционалним машинама.
Соларна енергија: Компаније попут Charge Robotics и Terabase развијају мобилне „фабрике“ које аутоматски претходно склапају и инсталирају читаве делове соларних модула директно на градилиштима соларних фарми, потенцијално удвостручујући продуктивност. AES-ов робот „Maximo“ користи вештачку интелигенцију, LiDAR и машински вид за аутоматизацију тешког подизања и монтаже соларних панела, смањујући време и трошкове до 50%. Comau-ов Hyperflex систем је мобилна фабрика смештена у полуприколици која склапа и инсталира соларне трагаче директно на терену.
Модернизација тешке индустрије: Бродоградња и ваздухопловство
Бродоградња: Ова традиционално индустрија са ниским степеном аутоматизације почиње да користи мобилне роботе за тешке услове рада. MR4Weld, који је развио Comau у сарадњи са бродоградилиштем Fincantieri, је аутономни мобилни робот за заваривање способан да се креће по неструктурираном окружењу бродоградилишта како би обављао радове заваривања на великим деловима трупа. Ово доноси нову флексибилност и ефикасност у монтажу масивних челичних конструкција.
Ваздухопловство: Овде се користе високо прецизни роботи велике снаге за бушење, закивање и спајање великих компоненти авиона као што су крила и делови трупа, где је потребна највећа тачност и поновљивост.
Затварање петље: Улога у циркуларној економији
Циљеви одрживости и прописи ЕУ подстичу потребу за ефикасном рециклажом и поновном обрадом сложених производа.
Аутоматизована демонтажа: Тешки роботи су идеални за демонтажу великих и тешких производа.
Батерије за електрична возила: Због велике тежине и потенцијалних опасности (електричних, хемијских), демонтажа батерија за електрична возила уз помоћ робота је кључни фактор за безбедну и економичну рециклажу. Истраживачки пројекти развијају роботске ћелије које аутоматски одвајају модуле батерија и ћелије.
Велика електроника и мотори: Институт Фраунхофер ради на роботским системима који користе вештачку интелигенцију и машински вид за аутоматско растављање рачунара, машина за прање веша и електромотора како би се извукли вредни материјали попут бакра и магнета од ретких земаља. Ово је важан корак ка успостављању „урбаног рударства“.
Ова нова поља примене деле заједничку карактеристику: она померају робота из високо структурираног, предвидљивог окружења фабричке хале у динамично, неструктурирано и често сурово „поље“. Ова промена у окружењу је главни покретач технолошког развоја у вештачкој интелигенцији, сензорској технологији и мехатроници. Технички изазов се помера са оптимизације понављајућих покрета на управљање неизвесношћу. Будући успех ће мање зависити од постепених побољшања брзине или прецизности, а више од продора у перцепцији окружења, аутономној навигацији и адаптивном планирању задатака.
Наша препорука: 🌍 Неограничен досег 🔗 Повезан 🌐 Вишејезичан 💪 Продајна моћ: 💡 Аутентичан са стратегијом 🚀 Иновација се сусреће са 🧠 Интуицијом

Од локалног до глобалног: Мала и средња предузећа освајају светско тржиште паметном стратегијом - Слика: Xpert.Digital
У ери у којој дигитално присуство компаније одређује њен успех, изазов лежи у стварању аутентичног, персонализованог и далекосежног присуства. Xpert.Digital нуди иновативно решење које се позиционира као пресек индустријског центра, блога и амбасадора бренда. Комбинује предности комуникационих и продајних канала на једној платформи и омогућава објављивање на 18 различитих језика. Сарадња са партнерским порталима и могућност објављивања чланака на Google News-у и листи за дистрибуцију штампе са приближно 8.000 новинара и читалаца максимизирају досег и видљивост садржаја. Ово представља кључни фактор у екстерној продаји и маркетингу (SMarkеting).
Више информација овде:
Раст, могућности, препреке: Стратегије за роботику тешких услова рада
Граница сарадње: Безбедна интеракција човека и робота са великим корисним теретом
Нови и наизглед контрадикторан тренд је примена принципа сарадње на роботе способне да врше потенцијално смртоносне силе. Овај развој трансформише тешке роботе од изолованих машина у моћне саиграче.
Изван кавеза: Спектар сарадње
Традиционални безбедносни концепт рада тешких робота унутар заштитних кућишта је неефикасан и ствара круто раздвајање између људских и машинских задатака. Међутим, модерна сарадња човека и робота (HRC) није јединствен концепт, већ спектар који се креће од једноставне коегзистенције (робот се зауставља када особа уђе у његово радно подручје) до блиске сарадње (човек и робот раде истовремено на истом радном предмету).
Кључна предност овог приступа је у томе што, за разлику од традиционалних лаганих коботова, колаборативни индустријски роботи нису подложни ограничењима у погледу носивости, брзине или прецизности. Они стога нуде најбоље из оба света: перформансе индустријског робота и флексибилност колаборативне примене.
Кључне технологије за безбедан тешки MRK
Безбедна сарадња човека и робота са тешким роботима омогућена је комбинацијом напредних сензора и интелигентних функција управљања.
Напредни безбедносни сензори: Основа безбедне сарадње између човека и робота (HRC) је способност система да детектује људско присуство и намере. То се постиже помоћу ласерских скенера са безбедносним сертификатом, 3D камера, па чак и подова осетљивих на притисак који стварају динамична, вишеслојна заштитна поља око робота.
Праћење брзине и раздаљине (SSM): Ово је кључна метода сарадње где је брзина робота обрнуто пропорционална његовој удаљености од човека. Како се особа приближава, робот успорава. Ако се особа превише приближи, робот се безбедно зауставља уз надгледање. Ово омогућава глатку и ефикасну интеракцију без физичких баријера.
Ограничавање снаге и силе (PFL): Иако представља изазов због велике инерције робота велике снаге, напредни системи управљања и сензори обртног момента у сваком зглобу омогућавају чак и великим роботима да раде у режиму ограничене силе за одређене задатке. Они се одмах заустављају након неочекиваног контакта. Ова функција се често користи за ручно вођење или задатке преноса.
Стандардизација и процена ризика: Имплементација апликација за безбедну сарадњу човека и робота (HRC) регулисана је стандардима као што су EN ISO 10218 и техничка спецификација ISO/TS 15066. Основни захтев је увек пажљива процена ризика целе апликације – тј. робота, хватаљке, радног предмета и окружења. Чак и робот који је сам по себи безбедан може да рукује опасним алатом.
Ови развоји доводе до редефиниције термина „кобот“. Традиционално, овај термин је био синоним за мале, лагане и инхерентно безбедне роботске руке. Интеграција колаборативне функционалности у тешке индустријске роботе разбија ову парадигму. „Колаборативни“ се развија од именице (врста робота, „кобот“) до придева или скупа функција („примена колаборативног робота“). Будућност не лежи у бинарном избору између „кобота“ и „индустријског робота“, већ у одабиру индустријског робота са одговарајућим теретом и перформансама, који је затим опремљен колаборативним безбедносним карактеристикама потребним за одређену примену. Ово драматично проширује потенцијал сарадње човека и робота (HRC) на области које су раније биле недоступне блиској сарадњи човека и машине, као што су монтажа тешких робота или логистика.
RaaS објашњава: Како компаније могу смањити баријеру за улазак робота
Тржиште робота за тешке услове рада спремно је за одрживи раст, вођено технолошким иновацијама и ширењем у нове секторе. Међутим, успешна имплементација захтева од компанија да доносе стратешке одлуке које превазилазе пуку технолошку процену.
Прогнозе величине и раста тржишта
Глобално тржиште индустријске роботике је значајан и растући сектор. Прогнозе величине тржишта варирају у зависности од обима и методологије анализе, али константно показују позитиван тренд
- Анализа предвиђа раст са 33,9 милијарди америчких долара у 2024. години на 60,5 милијарди америчких долара до 2030. године, што одговара сложеној годишњој стопи раста (CAGR) од 9,9%.
- Друга студија очекује раст са 16,9 милијарди америчких долара (2024) на 29,4 милијарде америчких долара до 2029. године (сложена годишња стопа раста 11,7%).
- Трећа прогноза предвиђа раст са 19,9 милијарди америчких долара (2024) на 55,5 милијарди америчких долара до 2032. године (сложена годишња стопа раста 14,2%).
Специфично тржиште за „тешке роботске платформе“ процењено је на 333,5 милиона америчких долара за 2024. годину, са прогнозом од 446,0 милиона америчких долара до 2030. године (сложена годишња стопа раста 5,0%). Неслагање са укупним бројкама илуструје да тешки роботи представљају вредносно интензиван, али мањи од просечног сегмента укупног тржишта.
Према подацима Међународне федерације за роботику (IFR), глобални оперативни фонд индустријских робота достигао је рекордних 4,28 милиона јединица у 2023. години, што представља повећање од 10% у односу на претходну годину. Иако је дошло до привременог смањења тржишта у 2024. години, очекује се да ће се дугорочни тренд раста наставити од 2025. године. Азија, посебно Кина, остаје највеће и најбрже растуће тржиште, са 70% нових инсталација.
Кључни покретачи и препреке раста
Покретачи раста:
- Недостатак квалификоване радне снаге и демографске промене: У многим индустријализованим земљама, недостатак квалификованих радника покреће аутоматизацију физички захтевних и понављајућих задатака.
- Индустрија 4.0 и паметна производња: Умрежавање и дигитализација производње захтевају интелигентне и флексибилне роботе као централне компоненте.
- Развој нових сектора: Раст је све више вођен увођењем у индустрије ван аутомобилског сектора, као што су логистика, грађевинарство и обновљиви извори енергије.
- Одрживост и враћање на старо: Роботи побољшавају ефикасност материјала, смањују отпад и омогућавају исплативу производњу у сопственој земљи.
Препреке:
- Висока почетна улагања: Трошкови за робота, његову интеграцију и потребну периферију представљају значајну препреку, посебно за мала и средња предузећа (МСП).
- Сложеност интеграције: Упркос кориснички прилагођенијим интерфејсима, интеграција робота у постојеће наслеђене системе и обезбеђивање интероперабилности могу остати изазов.
Стратешки императиви за имплементацију
За компаније које разматрају употребу робота велике снаге, следећа стратешка разматрања су кључна:
- Померање фокуса са капиталних издатака (Capex) на TCO и ROI: Инвестиционе одлуке не би требало да се заснивају искључиво на куповној цени. Холистичка анализа укупних трошкова власништва (TCO) – укључујући потрошњу енергије, одржавање и доступност – као и повраћај инвестиције (ROI) – вођен већим протоком, побољшаним квалитетом и смањеним трошковима рада – је неопходна.
- Коришћење нових пословних модела: Модели као што је Роботика као услуга (RaaS) смањују почетну инвестициону баријеру омогућавајући компанијама да изнајмљују роботске капацитете као оперативни трошак уместо да праве капитална улагања.
- Улагање у развој особља: Поједностављивање програмирања не елиминише потребу за квалификованим запосленима. Уместо тога, оно помера потребне вештине са чистог програмирања кода на задатке вишег нивоа као што су оптимизација процеса, праћење система и одржавање. Компаније морају да улажу у даљу обуку своје радне снаге како би ефикасно управљале и сарађивале са овим интелигентним машинама.
- Давање приоритета софтверу и екосистемима: Приликом избора робота, кључни критеријуми треба да буду софтверска платформа произвођача, једноставност коришћења и ширина партнерског екосистема. Јак екосистем пружа приступ унапред интегрисаним решењима и осигурава инвестицију у будућности у односу на променљиве захтеве.
Ту смо за вас - Консалтинг - Планирање - Имплементација - Управљање пројектима
☑️ Подршка малим и средњим предузећима у стратегији, консултацијама, планирању и имплементацији
☑️ Креирање или реорганизација дигиталне стратегије и дигитализације
☑️ Проширење и оптимизација међународних продајних процеса
☑️ Глобалне и дигиталне B2B платформе за трговање
☑️ Пионирски развој пословања

Konrad Wolfenstein
Било би ми драго да вам будем лични саветник.
Можете ме контактирати попуњавањем контакт форме испод или ме једноставно позовите на +49 89 89 674 804 (Минхен) .
Радујем се нашем заједничком пројекту.
Пиши ми

Xpert.Digital - Konrad Wolfenstein
Xpert.Digital је центар за индустрију фокусиран на дигитализацију, машинство, логистику/интралогистику и фотонапонске системе.
Са нашим решењем за развој пословања од 360°, пружамо подршку реномираним компанијама, од нових пословања до постпродајних услуга.
Тржишна интелигенција, маркетиншки маркетинг, маркетиншка аутоматизација, развој садржаја, односи с јавношћу, мејлинг кампање, персонализоване друштвене мреже и неговање потенцијалних клијената су део наших дигиталних алата.
Више информација можете пронаћи на: www.xpert.digital - www.xpert.solar - www.xpert.plus
Останите у контакту



















