TWIST систем: Технологија снимања покрета (MoCap) револуционише контролу хуманоидних робота – Слика: Xpert.Digital
Телеоперативни систем имитације целог тела: Интеракција човека и робота у реалном времену ће променити роботику
Људски покрети за роботе: Потенцијал TWIST система
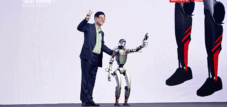
Научници су постигли значајан пробој у развоју система за телеоперацију хуманоидних робота. Коришћењем технологије снимања покрета, хуманоидни роботи сада могу да изводе покрете сличне људским у реалном времену. Ова иновација омогућава прецизно и интуитивно управљање роботима, што представља важан корак ка развоју робота са спретношћу целог тела. Посебно је вредан пажње нови систем TWIST (Телеоперисани систем за имитацију целог тела), који преноси комплетне покрете тела особе на робота, чиме се отвара нова ера интеракције човека и робота.
У вези са овим:


Основе телеоперације засноване на снимању покрета
Телеоперација се односи на даљинско управљање машинама и од посебног је значаја у области роботике. Телероботски системи се користе када је радни простор предалеко, премали, превелики или превише опасан за људе. Просторно раздвајање између човека (оператора) и робота (телеоператора) омогућава примене у различитим областима као што су минимално инвазивна хирургија, уклањање бомби и свемирске примене.
Технологија снимања покрета (MoCap) чини основу модерних система за телеоперацију. Ова технологија омогућава детаљно снимање и симулације људског кретања, дозвољавајући дигитализацију појединаца или читавих група људи. Снимљени покрети се интелигентно обрађују и могу се користити за анимирање тела и њихових покрета.
Како функционише технологија снимања покрета
Технологија снимања покрета прецизно прати и снима покрете тела стварних људи користећи специјално опремљено опремљено маркерима и оптичким системима. Овај процес прикупља податке о кретању свих делова тела – не само руку, шака, ногу и стопала, већ и трупа, кукова и главе. Ови свеобухватни подаци се затим трансформишу у команде које хуманоидни роботи могу да извршавају помоћу вештачке интелигенције (ВИ).
TWIST систем: Пробој у телеоперацији робота
TWIST систем, развијен на Универзитету Станфорд и Универзитету Сајмон Фрејзер, представља значајан напредак у телеоперацији хуманоидних робота. Он комбинује технологију снимања покрета са методама учења појачавањем и учења имитацијом.
„Желимо да хуманоиди поседују исти ниво спретности целог тела као људи“, објашњава Јанђие Зе, главни аутор TWIST студије. „Замислите неуредну кухињу. Људи могу да држе ствари обема рукама и да користе ноге да померају препреке, попут корпе на поду. Људи такође могу да отворе врата странама тела или лактовима. Желимо да хуманоиди буду у стању да ураде исто директно имитирајући људе.“
Техничка имплементација TWIST-а
TWIST систем се састоји од три основне компоненте:
- Прикупљање података и ретаргетирање: Путем ретаргетирања ван мреже и онлајн, људски покрети се прилагођавају роботу. Ово се постиже оптимизованим преносом 3Д положаја и оријентација зглобова, при чему се оријентација тела и положај стопала такође подешавају у реалном времену.
- Обука контролора у симулацији: TWIST користи двостепени приступ са методологијом „наставник-ученик“:
- Контролер „Наставник“ има привилегован приступ будућим референтним кретањима, што му омогућава да планира глађе покрете.
- „Студент“ контролер се обучава комбинацијом учења са појачањем (RL) и клонирања понашања (BC) и може приступити само тренутним информацијама о кретању.
- Контролер целог тела: Обучени контролер омогућава роботу да користи све степене слободе уз одржавање равнотеже. Ово резултира природнијим и људским покретима.
У тестовима са хуманоидним роботом Г1 компаније Unitree, истраживачи су открили да је довољно снимити покрете целог тела и прецизно их пренети на зглобове робота, осигуравајући да су покрети различитих удова координисани.
У вези са овим:

Изазови у хуманоидној телеоперацији
Развој система за телеоперацију хуманоидних робота представља истраживачима неколико сложених изазова:
Премошћавање јаза у отелотворењу
Кључни изазов је превазилажење „јаза у отелотворењу“ – анатомских разлика између људи и робота. Пошто роботи имају другачије пропорције, конфигурације зглобова и физичка својства од људи, директан пренос људских покрета није лако могућ.
Равнотежа и координација целог тела
Праћење целог хуманоидног тела захтева не само прецизну контролу појединачних зглобова, већ и динамичко одржавање равнотеже током сложених покрета. Конвенционални телеоперативни системи се често фокусирају само на изоловане покрете као што су кретање или манипулација, док TWIST омогућава координисане покрете целог тела.
Латенција и сензорна повратна информација
Системи за телеоперацију морају да превазиђу проблеме као што су латенција (временско кашњење) и ограничења у сензорним повратним информацијама. Ови фактори могу да наруше синхронизацију људских акција са роботским одговорима.
Разноврсне примене телеоперације снимањем покрета
Телеоперација хуманоидних робота заснована на снимању покрета отвара бројне могућности примене:
Опасне ситуације и спасилачке операције
У опасним окружењима, телеоперативни роботи могу се користити уместо људи, на пример у уклањању експлозивних убојних средстава (EOD). Између 2015. и 2020. године, само у Уједињеном Краљевству је било приближно 2.000 EOD операција годишње, што истиче потребу за безбедним алтернативама.
Сложени манипулативни задаци
Хуманоидни роботи могу да обављају сложене манипулативне задатке путем телеоперације, на пример у неструктурираним окружењима као што су кухиње или радионице. Њихова способност да координишу употребу целог тела, укључујући руке, шаке, ноге и стопала, нуди кључне предности у овом контексту.
Социјална роботика и експресивност
За хуманоидне друштвене роботе, способност извођења експресивних покрета је неопходна. OCRA систем (Оптимизационо-базирани прилагодљиви алгоритам за преусмеравање), развијен у MPI-ју, омогућава мапирање кретања у реалном времену између различитих кинематичких ланаца, што резултира интуитивним и људским покретима.
Алтернативни приступи и поређење различитих система
Поред TWIST-а, постоје и разни други приступи за телеоперацију засновану на снимању покрета:
Системи засновани на IMU-у
Неки истраживачи користе системе за снимање покрета засноване на IMU (Инерцијална јединица за мерење), који су преносиви и јефтинији од оптичких система. Ова технологија се користи, на пример, за телеоперацију локомотивно-манипулативних задатака, који комбинују кретање и манипулацију.
Приступи засновани на неуронским мрежама
Алтернативни приступ користи неуронске мреже за учење мапирања између података сензора из одела за снимање покрета и угаоних положаја актуатора робота. Ова метода не захтева претходни аналитички или математички модел робота и стога се може применити на различите парове људи и робота.
Системи за одређене делове тела
Поред система за телеоперацију целог тела, постоје и специјализовани системи који се фокусирају на одређене делове тела, као што је снимање покрета обе руке. Ови системи играју важну улогу у прецизној контроли бионичких бимануелних робота за деликатне манипулативне задатке.
У вези са овим:


Недавни напредак и будући изгледи
Развој система за телеоперацију хуманоидних робота брзо напредује. Поред TWIST-а, истраживачи су недавно представили и друге иновативне системе:
H2O: Од човека до хуманоида
H2O систем омогућава телеоперацију потпуно хуманоидног робота у реалном времену користећи само RGB камеру. Користи RL-базирани оквир и процес „sim-to-data“ за филтрирање и одабир одговарајућих покрета за хуманоидне роботе.
Телеоперација подржана проширеном стварношћу
Истраживачи такође истражују како проширена стварност (AR) може да подржи телеоперацију засновану на снимању покрета. Визуелизацијом виртуелне референце људске руке поред роботске руке, корисници могу боље разумети мапирање кретања.
Вештачка интелигенција и снимање покрета: Будућност интеракције човека и робота
Телеоперација хуманоидних робота заснована на снимању покрета знатно је напредовала последњих година. Системи попут TWIST-а представљају значајан корак напред омогућавајући роботима да изводе покрете сличне људским, целим телом у реалном времену.
Комбинација технологије снимања покрета и напредних метода вештачке интелигенције, као што су учење појачавањем и клонирање понашања, отвара нове могућности за интеракцију човека и робота. Хуманоидни роботи сада могу да изводе не само изоловане покрете, већ и координисане радње целог тела, омогућавајући већу спретност и изражајност.
У будућности, ове технологије би могле значајно проширити употребу хуманоидних робота у опасним окружењима, за сложене манипулативне задатке и у друштвеним контекстима. Континуирано побољшање прецизности, робусности и једноставности коришћења система за телеоперацију помоћи ће у даљем смањењу јаза између људских способности и роботског извршења.
У вези са овим:
Ваш глобални партнер за маркетинг и развој пословања
☑️ Наш пословни језик је енглески или немачки
☑️ НОВО: Преписка на вашем матерњем језику!

Konrad Wolfenstein
Ја и мој тим смо срећни што вам можемо бити на располагању као ваш лични саветник.
Можете ме контактирати попуњавањем контакт форме овде wolfenstein@xpert.digital:или ме једноставно позовите на +49 7348 4088 965. Моја имејл адреса је
Радујем се нашем заједничком пројекту.