Автоматизированный склад с роботами – Изображение: Xpert.Digital
Автономные роботы или челночные системы? Инновационные складские технологии: какая стратегия обеспечит компаниям конкурентное преимущество?
Революция автоматизации во внутрилогистике
Внутрискладская логистика, нервная система современной экономики, претерпевает глубокую трансформацию. Вопрос о том, какая складская система будет доминировать в будущем — структурированная, оптимизированная по пропускной способности челночная система или гибкая, автономная роботизированная система — это гораздо больше, чем просто техническая дискуссия. Это стало важнейшим стратегическим решением, которое определит конкурентоспособность, устойчивость и будущую жизнеспособность компаний во все более нестабильном мире.
В связи с этим:


Почему дискуссия «челнок против робота» так важна для будущего промышленности уже сегодня?
Три фундаментальные силы неумолимо продвигают это развитие вперед.
- Во-первых, экспоненциальный рост электронной коммерции навсегда изменил ожидания клиентов. Потребность в мгновенной доступности товаров, доставке в тот же день и безошибочной обработке заказов создает огромное давление на склады и распределительные центры.
- Во-вторых, постоянная нехватка квалифицированной рабочей силы во многих промышленно развитых странах значительно усугубляет ситуацию. Поиск и удержание квалифицированного персонала для монотонной и физически тяжелой работы на складе становится одной из самых больших операционных проблем.
- В-третьих, растущие эксплуатационные расходы, затраты на энергию и недвижимость вынуждают компании более эффективно использовать свои площади и оптимизировать процессы до мельчайших деталей.
На этом фоне автоматизация перестала быть просто вариантом и стала необходимостью. Глобальный рынок автоматизации складов отражает эту неотложность: с оценочной стоимостью в 26,5 млрд долларов США в 2024 году и прогнозируемым среднегодовым темпом роста (CAGR) более 15,9% до 2034 года, это один из самых динамично развивающихся технологических секторов. Однако, что примечательно, несмотря на этот быстрый рост, около 80% всех складов в мире по-прежнему преимущественно управляются вручную. Этот огромный неиспользованный потенциал становится полем битвы, где челночные системы и автономные мобильные роботы (AMR) борются за доминирование.
Выбор между этими двумя технологическими философиями — это решение о стратегическом направлении компании. Он отражает фундаментальное противоречие в современных цепочках поставок: конфликт между необходимостью экономической эффективности за счет высокооптимизированных, предсказуемых процессов и потребностью в гибкости за счет максимально адаптивных, гибких операций. Челночные системы являются физическим воплощением структурированной эффективности, разработанной для максимальной плотности хранения и максимальной пропускной способности в рамках фиксированной инфраструктуры. Автономные мобильные роботы (AMR), с другой стороны, воплощают адаптивную гибкость, созданную для работы в динамичной, постоянно меняющейся среде. Компания, инвестирующая в челночную систему, делает ставку на будущее, где ее ассортимент продукции и структура заказов будут достаточно стабильными, чтобы извлечь выгоду из этой экстремальной оптимизации. Компания, выбирающая AMR, ожидает будущего, полного изменчивости и непредсказуемости, где способность быстро адаптироваться является решающим конкурентным преимуществом. Таким образом, технологическое решение становится отражением стратегического прогноза компании для собственного рынка.
Определение и функционирование основных технологий
Что именно подразумевается под челночной системой и каковы её основные компоненты?
Челночная система — это высокодинамичный, управляемый компьютером автоматизированный склад мелких деталей (AS/RS), предназначенный для быстрого и эффективного хранения, перемещения и извлечения стандартизированных грузовых единиц, таких как контейнеры, коробки или лотки. Это сложная мехатронная система, выходящая далеко за рамки упрощенной аналогии с «конвейерной лентой». Производительность и эффективность такой системы достигаются за счет точного взаимодействия ее основных компонентов:
- Стеллажная система: Неподвижным каркасом системы является высокопрочная стальная конструкция, образующая каналы для хранения погрузочных единиц. Эти стеллажи спроектированы таким образом, чтобы максимально эффективно использовать доступную высоту, и могут достигать высоты более 20 метров, а в некоторых случаях даже до 30 метров.
- Челночные транспортные средства: это настоящие рабочие лошадки. Это автономные транспортные средства, которые перемещаются горизонтально по рельсам в пределах одного уровня стеллажей. Оснащенные телескопическими вилами или аналогичными устройствами для перемещения грузов, они подбирают грузовые единицы из отсеков стеллажей и транспортируют их к концу прохода.
- Лифты/подъемники: Эти важные компоненты обеспечивают вертикальное соединение. Они перемещают либо загрузочные блоки, либо, в некоторых системных архитектурах, сами челноки между различными уровнями стеллажей и предварительной зоной, которая обычно состоит из конвейерной системы. Их производительность часто является критическим фактором для общей пропускной способности системы.
- Конвейерная технология: взаимосвязанная сеть роликовых или ленточных конвейеров образует интерфейс с внешним миром. Она транспортирует товары от складской станции к подъемникам, а от подъемников — к последующим этапам обработки, таким как комплектация, упаковка или отгрузка.
- Система управления и программное обеспечение (WMS/WCS/MFS): «мозг» всей операции. Программное обеспечение для управления складом более высокого уровня (WMS) или специализированная система управления складом (WCS) или система управления материальными потоками (MFS) координирует каждое перемещение. Оно управляет местами хранения, оптимизирует стратегии перемещения челноков и подъемников и обеспечивает бесшовную интеграцию с общей ИТ-инфраструктурой компании, такой как система планирования ресурсов предприятия (ERP).
Какие существуют основные типы челночных систем и чем они отличаются по своей архитектуре и применению?
Технология челночных систем претерпела значительную эволюцию, перейдя от жестких одномерных архитектур к высокогибким трехмерным системам. Это развитие является прямым ответом на растущий рыночный спрос на большую гибкость и масштабируемость.
- Одноуровневая челночная система: это классическая архитектура, в которой каждая челночная система постоянно привязана к одному уровню стеллажей и проходу. Пропускная способность определяется количеством челноковых систем на уровне и грузоподъемностью подъемника. Масштабируемость достигается в основном за счет добавления большего количества проходов. Примерами таких систем являются системы SSI Flexi и Cuby.
- Многоуровневая челночная система: Этот вариант, часто описываемый как гибрид классической машины для хранения и поиска (SRM) и челночной системы, может обслуживать несколько уровней в проходе с помощью встроенного подъемного механизма. Это снижает сложность и стоимость стеллажной конструкции и предлагает привлекательное соотношение цены и качества для приложений со средней и высокой пропускной способностью. Примером является система Schäfer Lift & Run (SLR).
- Челночные контейнеры с возможностью смены полосы движения / 3D-контейнеры: значительный эволюционный скачок. Эти контейнеры могут не только перемещаться горизонтально в пределах своего прохода, но и менять проходы. Это полностью отделяет производительность (количество контейнеров) от емкости хранения (количество мест на стеллажах). Компания может начать всего с нескольких контейнеров и легко добавить больше по мере роста спроса. Кроме того, они позволяют создавать 100% последовательность товаров для извлечения непосредственно в системе, потенциально исключая необходимость в последующих процессах сортировки. KNAPP Evo Shuttle 2D — яркий пример такого типа контейнеров.
- Роботы-подъемники / системы кубического хранения: Эта революционная разработка отходит от традиционной челночной архитектуры. Здесь роботы либо перемещаются по сетчатой раме над плотно расположенными контейнерами (например, AutoStore), либо поднимаются и спускаются непосредственно по стеллажной конструкции (например, Exotec Skypod). Эти 3D-системы полностью исключают необходимость в отдельных проходах и лифтах, что обеспечивает чрезвычайно высокую плотность хранения и гибкость.
- Паллетные челноки: Специализированная категория для хранения целых паллет в условиях высокой плотности. Эти прочные челноки работают в глубоких складских каналах и часто используются на холодильных складах или для буферного хранения на производстве.
Эта технологическая эволюция в мире мобильных мобильных систем поразительна. Она демонстрирует, что производители осознали сложность задачи, связанной с более гибкими автономными мобильными роботами (AMR), и активно пытаются интегрировать характеристики, подобные AMR, — такие как возможность менять проходы или работать в трех измерениях, — в свою парадигму хранения высокой плотности. В результате некогда четкие границы размываются, и самые передовые «мобильные мобильные системы» сегодня по сути представляют собой специализированные, вертикально ориентированные системы AMR, работающие в рамках определенной структуры.
Что такое «робот» в контексте складского хозяйства, и в чем принципиальное различие между автономными мобильными роботами (AMR) и беспилотными транспортными системами (AGV)?
В контексте складского хозяйства принципиально важно различать «робота» как общий термин и конкретные технологии AGV (автоматизированное транспортное средство) и AMR (автономный мобильный робот). Хотя оба робота перевозят материалы, они основаны на принципиально разных принципах навигации.
- AGV (автоматизированное транспортное средство): это более старая, устоявшаяся технология. AGV — это «управляемые» транспортные средства. Они следуют по фиксированным, физически или виртуально заданным траекториям, предопределенным магнитными полосами на полу, цветными линиями, лазерными сканерами, направленными на отражатели, или другими системами навигации. Их интеллектуальные возможности ограничены: если AGV сталкивается с препятствием, оно останавливается и ждет, пока путь снова не станет свободным. Внедрение сложное, часто требует структурных изменений инфраструктуры, а полученная система является жесткой. Любое изменение маршрута требует значительных усилий.
- Автономные мобильные роботы (AMR): это более новая, гораздо более интеллектуальная и гибкая технология. AMR — это «автономные» транспортные средства. Им не требуется внешнее управление. Вместо этого они создают цифровую карту окружающей среды и свободно перемещаются, подобно беспилотному автомобилю. Используя свои передовые датчики, они в режиме реального времени обнаруживают препятствия, такие как люди, погрузчики или бесхозные поддоны, и динамически планируют альтернативный маршрут, чтобы их избежать. Их внедрение происходит быстро, не требует структурных изменений и обеспечивает максимальную гибкость.
Хотя технологические границы все больше размываются, поскольку автоматизированные транспортные средства (AGV) также оснащаются более интеллектуальными функциями, основное различие остается неизменным: AGV следует по заранее определенному маршруту, в то время как автономный мобильный робот (AMR) интеллектуально перемещается в свободном пространстве. Поэтому в дальнейшем анализе основное внимание будет уделено гибким AMR как истинному технологическому аналогу структурированных челночных систем.
Как автономные мобильные роботы (AMR) перемещаются и работают в динамичной складской среде, чтобы автономно выполнять свои задачи?
Автономность и гибкость автономных мобильных роботов основаны на сложном взаимодействии картографирования, датчиков и интеллектуального программного обеспечения. Этот процесс можно разделить на несколько этапов:
- Картирование: Прежде чем автономный мобильный робот (AMR) сможет приступить к работе, необходимо создать цифровую карту склада. Это делается либо «в автономном режиме», когда робот вручную перемещается по территории для сбора данных, либо «в онлайн-режиме», когда робот создает и уточняет карту в режиме реального времени во время работы.
- Локализация (SLAM): Для определения своего местоположения робот-мобильный робот использует технологию SLAM (одновременная локализация и картографирование). Робот непрерывно сравнивает данные со своих датчиков с сохраненной картой, чтобы в режиме реального времени с высокой точностью определять свое положение и ориентацию.
- Датчики: Автономные мобильные роботы (AMR) оснащены различными датчиками, обеспечивающими им всесторонний обзор окружающей среды на 360 градусов:
- Лидар (Light Detection and Ranging): Лазерные сканеры излучают световые импульсы и измеряют их отражения, создавая точное облако точек окружающей среды. Это основная технология для картирования и обнаружения препятствий на расстоянии.
- 3D-камеры: они захватывают визуальные данные и информацию о глубине, что улучшает распознавание объектов. Они также часто используются для точного позиционирования путем считывания QR-кодов или других отметок на полу или полках.
- Инерциальный измерительный блок (IMU): инерциальная измерительная система, которая измеряет ускорение и скорость вращения и помогает роботу отслеживать собственное движение между обновлениями показаний датчиков.
- Навигация и предотвращение столкновений: система управления парком устройств назначает роботу-переносчику пункт назначения (например, «ехать к пункту выдачи посылок № 5»). Затем робот рассчитывает оптимальный маршрут. Во время поездки датчики постоянно отслеживают путь. Если обнаруживается неожиданное препятствие, робот-переносчик не просто останавливается, а анализирует ситуацию и за доли секунды планирует объезд, чтобы все же добраться до пункта назначения.
- Искусственный интеллект (ИИ) и машинное обучение (МО): Передовые алгоритмы работают в фоновом режиме, интерпретируя огромные объемы данных с датчиков, принимая решения о планировании наиболее безопасного и эффективного маршрута и улучшая навигационные характеристики робота за счет непрерывного обучения с течением времени.
Ваши эксперты в области внутрилогистики

Консультирование, планирование и внедрение комплексных решений для высотных складов и автоматизированных систем хранения. — Изображение: Xpert.Digital
Более подробная информация здесь:
Челночные системы против автоматизированных мобильных роботов: интеллектуальные роботы или классические челночные системы?
Прямое сравнение систем – многомерный анализ
Как системы челночного транспорта и автономные мобильные роботы показывают себя в прямом сравнении производительности с точки зрения пропускной способности и скорости?
Производительность, измеряемая пропускной способностью (например, объем хранения и извлечения данных в час), является одним из ключевых отличительных признаков двух системных подходов.
Челночные системы разработаны с нуля для обеспечения чрезвычайно высокой пропускной способности в заданных условиях. Их архитектура спроектирована таким образом, чтобы обеспечить параллельное перемещение. В то время как десятки челноков одновременно перемещаются горизонтально на своих уровнях, лифты работают независимо в вертикальном направлении. Такое разделение горизонтальных и вертикальных путей транспортировки обеспечивает огромную пиковую производительность. Передовые системы могут достигать пропускной способности более 1000 двойных циклов (один цикл хранения и один цикл извлечения) в час и на один проход. Это делает челночные системы бесспорными «спринтерами» для высокочастотных, повторяющихся задач хранения и извлечения в стационарной конструкции.
Автономные мобильные роботы (АМР) в своем традиционном виде не оптимизированы в первую очередь для максимальной производительности в минимально возможном пространстве. Их сила заключается в гибкой и эффективной транспортировке грузов на переменные и часто большие расстояния в динамичной среде. Хотя один АМР может развивать скорость до 4 м/с, общая производительность парка зависит от многих факторов: сложности маршрутов, объема трафика от других роботов или людей, расстояния между станциями и общей структуры заказов. Они больше похожи на «марафонцев», адаптирующихся к меняющимся условиям.
Однако здесь также проявляется упомянутая выше конвергенция технологий. Так называемые кубические системы хранения, такие как Exotec Skypod, основанные на роботах-подъемниках, специально разработаны для сочетания гибкости автономных мобильных роботов (AMR) с очень высокой производительностью. На соединенных станциях комплектации можно достичь производительности до 400 комплектаций в час на станцию. Эти гибридные подходы все чаще бросают вызов традиционной дихотомии «челнок = высокая производительность» и «AMR = высокая гибкость».
В связи с этим:


Какая система обеспечивает более высокую плотность хранения и более эффективно использует доступное пространство?
Плотность хранения — это традиционный ключевой аргумент и область применения челночных систем. В мире растущих цен на недвижимость и землю максимизация использования объема является важнейшим экономическим фактором.
Системы челночного хранения обеспечивают беспрецедентную плотность размещения контейнеров. За счет минимизации количества проходов и использования всей доступной высоты здания (до 30 метров и более) складское пространство становится чрезвычайно компактным. Такие методы, как двух- или многоярусное размещение контейнеров внутри каналов, еще больше увеличивают вместимость на заданной площади.
Классические автономные мобильные роботы (АМР), перемещающие товары между широко расставленными стеллажами, естественно, требуют более широких путей перемещения и не могут эффективно использовать вертикальное пространство. Их оптимизация фокусируется не на статической плотности хранения, а на динамической эффективности процесса.
Однако даже в этой области четкие границы размываются. Упомянутые выше кубические системы хранения (такие как AutoStore или Exotec Skypod) обеспечивают чрезвычайно высокую плотность хранения за счет штабелирования контейнеров непосредственно друг на друга без стеллажей, при этом роботы получают доступ к нужному контейнеру сверху. Они сочетают в себе плотность компактного склада с гибкостью роботов. Дальнейшим развитием являются роботы-манипуляторы (AMR), способные перемещаться по высоким стандартным стеллажам, что значительно улучшает использование вертикального пространства по сравнению с чисто наземными транспортными средствами.
Насколько гибкими и масштабируемыми являются обе системы с учетом меняющихся бизнес-требований и сезонных пиков?
Гибкость и масштабируемость — отличительные черты автономных мобильных роботов (AMR), и зачастую именно они являются решающим аргументом в пользу их использования на нестабильных рынках.
Автономные мобильные роботы (AMR) обеспечивают максимальную гибкость и масштабируемость:
- Масштабируемость: Адаптация к большим объемам заказов осуществляется удивительно легко. Для увеличения пропускной способности к существующему парку роботов просто добавляются новые. Этот процесс может быть завершен за минуты или часы без прерывания работы. Емкость хранилища может быть расширена за счет установки дополнительных стеллажей, совершенно независимо от пропускной способности (т.е. количества роботов).
- Гибкость: Автономные мобильные роботы (AMR) управляются программным обеспечением. Новые маршруты, дополнительные рабочие места или полностью измененные технологические процессы могут быть внедрены немедленно посредством обновлений программного обеспечения. Система адаптируется к новой планировке склада или меняющимся требованиям без каких-либо физических изменений. Это делает их идеальным решением для высокодинамичных сред, таких как электронная коммерция или логистика третьих сторон (3PL), где объемы и структура заказов значительно колеблются.
Традиционно челночные системы гораздо более жёсткие:
- Масштабируемость: Хотя современные челночные системы в принципе модульные и масштабируемые, сам процесс значительно сложнее. Для увеличения пропускной способности можно добавить дополнительные челноки в проходы или расширить целые стеллажные проходы для увеличения емкости хранения. Однако такие расширения представляют собой масштабные строительные проекты, требующие тщательного планирования, значительных инвестиций и часто частичного или полного прекращения работы.
- Гибкость: Базовая инфраструктура стеллажных проходов, направляющих и лифтов фиксирована. Фундаментальное изменение потока материалов, такое как перемещение зоны комплектации заказов, крайне затруднительно и дорого. Система разработана для конкретного, оптимизированного процесса и с трудом адаптируется к фундаментальным изменениям.
Чем отличаются эти системы с точки зрения капитальных затрат (CAPEX), операционных расходов (OPEX) и времени внедрения?
Анализ общей стоимости владения (TCO) и скорости внедрения выявляет принципиально разные бизнес-модели и имеет решающее значение для принятия инвестиционных решений.
- Первоначальные инвестиции (CAPEX):
- Челночные системы: Они требуют очень высоких первоначальных инвестиций. Затраты включают в себя не только сами транспортные средства, но и масштабную инфраструктуру, состоящую из высокоточных стальных конструкций, мощных лифтов, километров конвейерной техники и сложной системы управления.
- Автономные мобильные роботы (АМР): требуют значительно меньших первоначальных инвестиций. Поскольку они перемещаются в рамках существующей инфраструктуры, дорогостоящие и сложные модификации не требуются. Компании могут начать с небольшого парка всего из нескольких роботов и постепенно корректировать свои инвестиции в соответствии с ростом бизнеса («оплата по мере роста»). Модели, такие как «Робот как услуга» (RaaS), при которых оборудование арендуется, также становятся все более распространенными, еще больше снижая порог капитальных затрат и преобразуя затраты в переменные операционные расходы (ОПС).
- Время реализации:
- Системы челночных перевозок: Реализация проекта челночной перевозки — длительный процесс, который может занять много месяцев или даже лет, от планирования и производства до установки и ввода в эксплуатацию. Установка неизбежно приводит к значительным сбоям в работе.
- Автономные мобильные роботы (AMR): Внедрение происходит чрезвычайно быстро. После составления карты окружающей среды роботы часто могут быть введены в эксплуатацию в течение нескольких дней или недель, зачастую даже параллельно с текущими операциями. Такое быстрое развертывание приводит к значительно более быстрой окупаемости инвестиций (ROI), которая во многих случаях может составлять менее года.
- Операционные расходы (ОПЭКС):
- Челночные системы: Благодаря высокой эффективности и сокращению потребности в персонале, они могут быть очень экономически выгодными в долгосрочной перспективе. Однако поддержание всей сложной системы в рабочем состоянии может быть трудоемким и дорогостоящим. Современные челночные системы значительно более энергоэффективны, чем старые системы хранения и поиска.
- Автономные мобильные роботы (AMR): Затраты на техническое обслуживание одного робота относительно невелики, но для большого парка роботов необходимо учитывать общие затраты на техническое обслуживание и управление батареями. Современные литий-ионные батареи и интеллектуальные автоматизированные циклы зарядки позволяют снизить энергопотребление и эксплуатационные затраты.
Финансовые модели, лежащие в основе этих технологий, столь же разнообразны, как и их технические характеристики. Системы челночного транспорта представляют собой традиционный, долгосрочный, крупномасштабный проект, требующий высокой степени инвестиционной безопасности и точных прогнозов будущего спроса. Автономные мобильные роботы (AMR), с другой стороны, особенно с моделями RaaS (Real-as-Service), представляют собой сдвиг парадигмы в сторону гибкого финансирования и операционных расходов. Они позволяют компаниям рассматривать автоматизацию как масштабируемую услугу, а не как связанный актив. Эта финансовая гибкость оказывает столь же разрушительное воздействие на многие компании, как и сама технология, демократизируя доступ к передовой автоматизации логистики, позволяя малым и средним предприятиям конкурировать с гигантами отрасли.
Подробное сравнение критериев: челночные системы против автономных мобильных роботов (АМР)
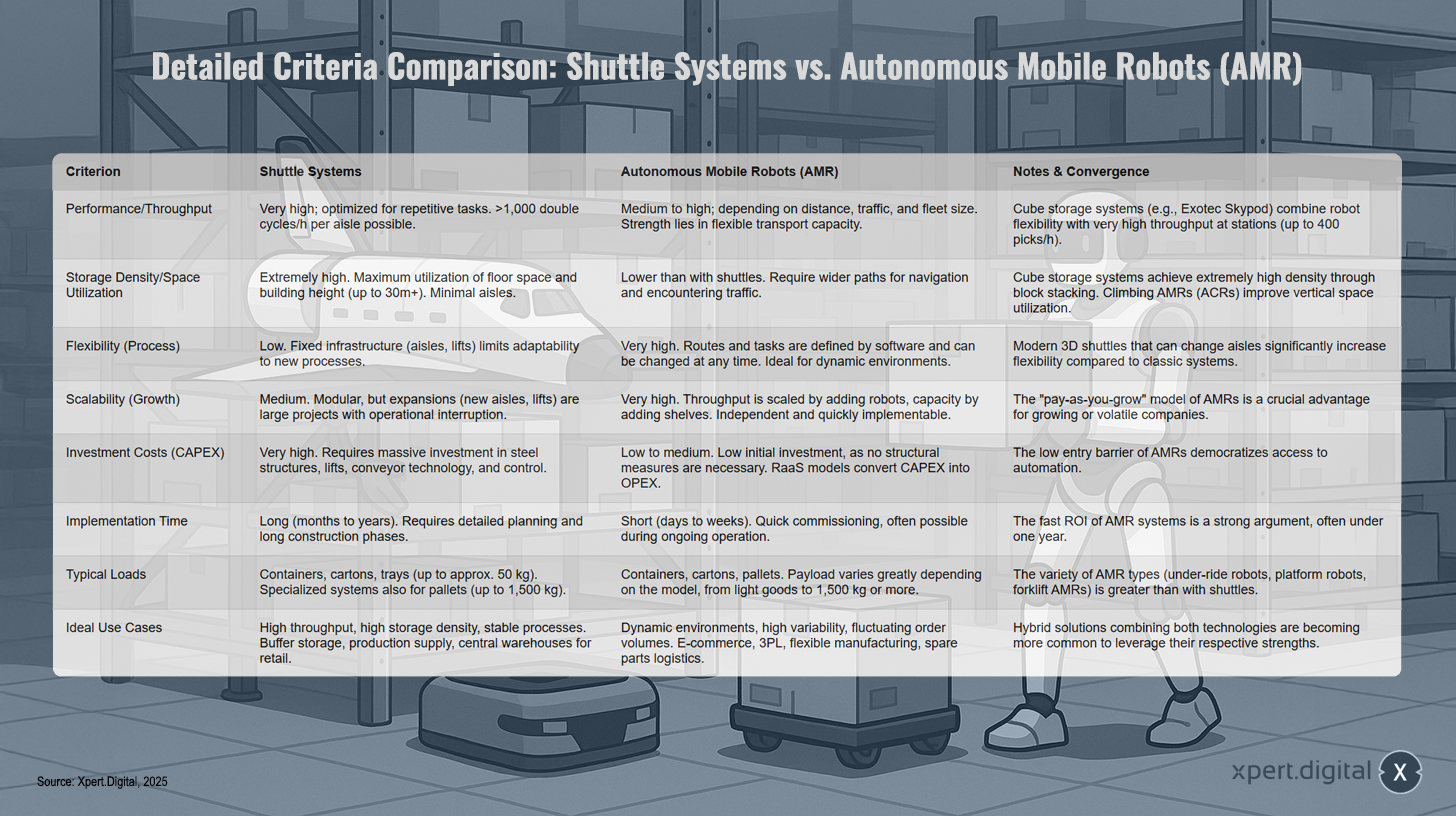
Подробное сравнение критериев: челночные системы против автономных мобильных роботов (АМР) – Изображение: Xpert.Digital
Сравнение челночных систем и автономных мобильных роботов (АМР) выявляет захватывающее развитие складских технологий. Обе системы имеют свои специфические сильные и слабые стороны, которые необходимо учитывать по-разному в зависимости от области применения.
Челночные системы отличаются чрезвычайно высокой производительностью — более 1000 двойных циклов в час — и максимальным использованием пространства до 30 метров в высоту. Они идеально подходят для стабильных, повторяющихся процессов с большим объемом работы. Однако инвестиционные затраты значительны, а гибкость ограничена наличием стационарной инфраструктуры.
В отличие от них, автономные мобильные роботы предлагают замечательную гибкость процессов. Их маршруты и задачи могут быть быстро адаптированы с помощью программного обеспечения, что делает их идеальными для динамичных сред. Время внедрения короткое, а первоначальные инвестиции значительно ниже. Современные подходы, такие как системы кубического хранения, уже демонстрируют, как обе технологии могут сближаться.
Выбор между челночными системами и автономными портативными магнитофонами (AMR) зависит от конкретных бизнес-требований: челночные системы идеально подходят для высокой производительности и плотности хранения, в то время как AMR — лучший выбор с точки зрения гибкости и быстрой масштабируемости. Всё чаще компании также выбирают гибридные решения, чтобы объединить преимущества обеих технологий.
Мозг всей системы – программное обеспечение, управление и интеграция
Какова роль программного обеспечения в управлении системами шаттлов и как оно интегрировано в существующую ИТ-инфраструктуру (WMS/WMS)?
Без интеллектуального программного обеспечения челночная система представляет собой всего лишь набор «неинформативных металлических элементов». Ее истинный потенциал раскрывается только при взаимодействии с цифровым «мозгом» системы. Как правило, эту роль выполняет комбинация программного обеспечения для управления складом (WMS) и базовой системы управления материальными потоками (MFS) или системы управления складом (WCS).
Задачи этого программного обеспечения разнообразны и имеют решающее значение для его производительности:
- Управление размещением товаров на складе: программное обеспечение в режиме реального времени определяет оптимальное место хранения для поступающего товара. Критерии могут включать частоту доступа (ABC-анализ), группировку товаров для заказа или равномерное использование проходов.
- Управление заказами и последовательностью: система получает заказы от вышестоящей ERP-системы и разбивает их на отдельные транспортные заказы для оборудования. Она обеспечивает извлечение товаров в оптимальной последовательности для последующего процесса (например, упаковки).
- Аппаратное управление: Программное обеспечение — это дирижер оркестра. Оно отправляет конкретные команды перемещения каждому отдельному челноку, каждому подъемнику и каждому сегменту конвейерной системы и синхронизирует их движения для обеспечения плавного и эффективного потока материалов.
- Управление запасами в режиме реального времени: поскольку каждое перемещение товара регистрируется, система обеспечивает непрерывный, посекундный учет запасов. Уровень запасов всегда на 100% прозрачен.
Интеграция в существующую ИТ-инфраструктуру является ключом к успеху. Бесперебойная связь между системой управления складом (WMS/MFS) и системой планирования ресурсов предприятия (ERP) компании имеет важное значение. Стандартизированные интерфейсы (API) облегчают обмен данными о заказах, основными данными и информацией об инвентаризации, гарантируя непрерывный поток информации от заказа клиента до отгрузки.
Почему программное обеспечение для управления автопарком незаменимо для автономных мобильных роботов и какие интеллектуальные функции на основе искусственного интеллекта оно предлагает?
Если система управления складом (WMS) представляет собой стратегический уровень, определяющий «что» и «когда» логистических процессов, то программное обеспечение для управления автопарком — это тактическая информация, которая в режиме реального времени определяет «кто» и «как» для парка автономных мобильных роботов (AMR). Отдельный AMR — это инструмент; парк без централизованного управления был бы сплошным хаосом.
Программное обеспечение для управления автопарком незаменимо и предлагает ряд высокоинтеллектуальных функций:
- Управление движением: Подобно управлению воздушным движением, программное обеспечение координирует маршруты всех роботов на складе. Оно предотвращает столкновения, регулирует приоритет движения на перекрестках и предотвращает заторы, динамически управляя потоком транспорта.
- Интеллектуальное распределение задач: когда от системы управления складом (WMS) поступает новый транспортный заказ, программное обеспечение для управления парком роботов определяет, какой робот лучше всего подходит для выполнения задачи. Алгоритмы на основе искусственного интеллекта учитывают множество факторов в режиме реального времени: текущее положение роботов, уровень заряда их батарей, текущую рабочую нагрузку и приоритет заказа.
- Планирование маршрутов на основе ИИ: программное обеспечение рассчитывает не просто кратчайший маршрут, а наиболее эффективный. Оно может прогнозировать и объезжать пробки, находить альтернативные маршруты при перекрытии дорог и оптимизировать весь материальный поток автопарка для минимизации времени транспортировки.
- Интеграция периферийных устройств: Современные системы управления парком роботов не только контролируют самих роботов, но и координируют их взаимодействие с окружающей средой. Они могут автоматически открывать ворота, вызывать лифты или координировать перемещение грузов к роботизированным манипуляторам и конвейерным лентам.
- Автоматическое управление энергопотреблением: программное обеспечение отслеживает уровень заряда каждого робота и автоматически отправляет его на ближайшую доступную зарядную станцию в нужное время, когда уровень заряда батареи низкий, чтобы обеспечить круглосуточную работу.
Ключевым достижением является разработка независимых от производителя стандартов связи, таких как VDA 5050. Менеджеры автопарков, поддерживающие этот стандарт, могут управлять разнородными парками транспортных средств от разных производителей. Это дает компаниям свободу выбора наиболее подходящего робота для каждой задачи и предотвращает долгосрочную зависимость от одного поставщика («привязка к поставщику»).
Какие основные проблемы возникают при обеспечении совместимости и бесшовной интеграции этих сложных систем в существующие операционные процессы?
Внедрение передовых решений в области автоматизации — сложная задача, выходящая далеко за рамки чисто технологических аспектов. Проблемы можно разделить на технические и организационные.
- Технические проблемы:
- Совместимость систем и интерфейсы: Самая большая техническая проблема заключается в обеспечении бесперебойной связи между различными программными уровнями: ERP, WMS, MFS и системой управления автопарком. Зачастую это требует использования специального промежуточного программного обеспечения или сложной разработки специализированных интерфейсов прикладного программирования (API), позволяющих системам взаимодействовать друг с другом.
- Гармонизация данных: форматы и протоколы данных должны быть корректно «переведены» и стандартизированы между системами (сопоставление данных), чтобы заказ из системы ERP в конечном итоге приводил к корректному физическому перемещению товара на складе.
- Сетевая инфраструктура: автономные мобильные роботы (AMR), в частности, нуждаются в чрезвычайно стабильном, комплексном и высокопроизводительном Wi-Fi-соединении. Во многих существующих складах сеть не рассчитана на эти требования и требует дорогостоящей модернизации.
- Безопасность: Интеграция должна гарантировать как физическую, так и цифровую безопасность. Это включает в себя подключение к существующим системам безопасности, таким как цепи аварийной остановки и системы противопожарной защиты, а также защиту всей сети от кибератак, которые могут парализовать работу всего автопарка.
- Организационные проблемы:
- Принятие роботами изменений и управление изменениями: внедрение роботов может вызвать у сотрудников опасения по поводу потери работы. Поэтому для успешного проекта необходима открытая коммуникационная стратегия, раннее вовлечение сотрудников и комплексные программы обучения для развития новых навыков работы с машинами (например, мониторинг парка техники, техническое обслуживание).
- Реинжиниринг процессов: наибольшая отдача от инвестиций достигается не простой заменой человека машиной. Истинный успех заключается в фундаментальном перепроектировании всей цепочки процессов для полного использования уникальных возможностей автоматизации. Это требует переосмысления рабочих процессов, показателей эффективности и философии управления.
- Первоначальные инвестиции: Несмотря на преимущества, затраты, особенно на комплексные системы челночных перевозок, представляют собой серьезное препятствие для многих средних компаний. Такие стратегии, как начало с небольших пилотных проектов, постепенное масштабирование или использование моделей финансирования RaaS, могут помочь преодолеть этот барьер.
Опыт показывает, что самые большие проблемы часто носят не технический, а организационный характер. Проект автоматизации — это не просто ИТ-проект, а масштабный проект трансформации бизнеса. Компании, которые просто пытаются «встроить» новые технологии в старые, ручные процессы, не смогут реализовать весь их потенциал. Победителями станут те, кто использует технологии в качестве катализатора для переосмысления всей своей операционной модели.
🎯🎯🎯 Воспользуйтесь обширным пятисторонним опытом Xpert.Digital в одном комплексном пакете услуг | Развитие бизнеса, НИОКР, XR, PR и оптимизация цифровой видимости


Воспользуйтесь обширным пятисторонним опытом Xpert.Digital в рамках комплексного пакета услуг | НИОКР, XR, PR и оптимизация цифровой видимости - Изображение: Xpert.Digital
Компания Xpert.Digital обладает глубокими знаниями в различных отраслях. Это позволяет нам разрабатывать индивидуальные стратегии, точно соответствующие требованиям и задачам вашего конкретного сегмента рынка. Благодаря постоянному анализу рыночных тенденций и мониторингу отраслевых разработок мы можем действовать на опережение и предлагать инновационные решения. Сочетание опыта и экспертных знаний создает добавленную стоимость и обеспечивает нашим клиентам решающее конкурентное преимущество.
Более подробная информация здесь:
Челночные транспортеры против автономных мобильных роботов – гибридные системы: ключ к успеху в логистике в следующем десятилетии?
Рынок, игроки и будущие тенденции
Как выглядит текущая ситуация на рынке и какие существуют прогнозы роста в сфере автоматизации складских помещений?
Рынок автоматизации складов переживает взрывной рост, обусловленный необратимыми тенденциями электронной коммерции, многоканальной розничной торговли и глобальным дефицитом рабочей силы. Данные ясно показывают, что отрасль находится на подъеме:
- Размер и рост рынка: По оценкам, объем мирового рынка в 2024 году достигнет 26,5 млрд долларов США. Прогнозы предсказывают впечатляющий среднегодовой темп роста (CAGR) более 15,9% в период до 2034 года. В частности, для Европы ожидается рост с 4,9 млрд долларов США в 2024 году до 9,59 млрд долларов США в 2029 году, что соответствует CAGR в 14,4%. Аналогичная динамика наблюдается и в Северной Америке, где, по прогнозам, рынок США увеличится более чем вдвое к 2030 году.
- Проникновение на рынок: Несмотря на впечатляющие показатели роста, потенциал далеко не исчерпан. По оценкам, сегодня лишь около 5% складов по всему миру имеют высокую степень автоматизации. Еще 15% используют частичные решения, такие как конвейерные ленты, в то время как подавляющее большинство, 80%, по-прежнему в значительной степени управляются вручную. Такой низкий уровень автоматизации свидетельствует об огромном потенциале будущего роста для таких технологий, как челночные системы и автономные мобильные роботы (AMR).
- Региональные приоритетные направления: Европа, и Германия в частности, может похвастаться одной из самых высоких плотностей роботизации в мире и является центром притяжения для производителей оригинального оборудования и системных интеграторов. В то же время Центральная и Восточная Европа считаются быстрорастущими рынками будущего. В США, особенно в крупном сегменте средних предприятий, существует значительная потребность в наверстывании упущенного в области автоматизации, что также является движущей силой сильного роста в этой стране.
В связи с этим:


Какие компании являются ведущими поставщиками систем челночного транспорта и автоматизированных мобильных роботов?
Конкурентная среда неоднородна. В секторе челночных систем доминируют крупные, давно существующие поставщики внутрилогистических решений, часто предлагающие комплексные решения «под ключ». Рынок автономных мобильных роботов (AMR) более динамичен и фрагментирован, на нем сочетаются как устоявшиеся промышленные компании, так и узкоспециализированные, гибкие стартапы в области робототехники.
- Ведущие поставщики челночных систем (часто в составе комплексных решений):
- ДАИФУКУ (Япония)
- SSI Schäfer (Германия)
- Dematic (входит в состав Kion Group, Германия)
- KNAPP (Австрия)
- TGW Logistics Group (Австрия)
- Вандерланде (часть Toyota Industries, Нидерланды)
- Мекалюкс (Испания)
- Swisslog (входит в состав KUKA AG, Швейцария)
- WITRON Логистика + Информатика (Германия)
- Ведущие поставщики систем автоматизированного мониторинга здоровья (выбор по специализации):
- Роботы для доставки товаров людям / роботы-лазатели: Exotec (Франция), Geek+ (Китай), Hai Robotics (Китай).
- Роботы-посредники / Роботы для совместной работы: Locus Robotics (США), Mobile Industrial Robots (MiR, подразделение Teradyne, Дания).
- Промышленные AMR и управление автопарком: KUKA (Германия), ABB (Швейцария/Швеция), DS AUTOMOTION (часть SSI Schäfer, Австрия).
В целом, уровень концентрации рынка оценивается как «средний», что указывает на здоровую и инновационную конкуренцию между игроками.
Какие технологические тенденции, такие как гибридные системы, искусственный интеллект и коллаборативные роботы, определят следующее поколение складских систем?
Развитие технологий автоматизации складов постоянно продолжается. Несколько ключевых тенденций определят следующее поколение систем и еще больше расширят границы возможного сегодня.
- Гибридные системы и конвергенция: жесткое разделение между различными системными мирами исчезает. Будущее принадлежит интегрированным гибридным решениям, которые разумно сочетают в себе их сильные стороны. Типичный сценарий включает использование высокоплотной челночной или кубической системы хранения для складирования и ее соединение с гибкими автоматизированными транспортными средствами (AGV) для транспортировки товаров к децентрализованным, эргономичным станциям комплектации или между различными зонами хранения и производства. Это позволяет избежать жестких конвейерных технологий и максимизировать как плотность, так и гибкость.
- Искусственный интеллект (ИИ) и машинное обучение (МО) повсеместно распространены: ИИ превращается из нишевой функции в неотъемлемую часть общего управления складом. Помимо простого планирования маршрутов для автоматизированных транспортных средств (AGV), он используется для глобальной оптимизации процессов: прогнозной аналитики для прогнозирования пиков спроса и упреждающей корректировки ресурсов, интеллектуальной оптимизации запасов, которая динамически перемещает товары на основе прогнозируемых заказов, и адаптивных алгоритмов обучения, которые постоянно улучшают общую систему за счет анализа оперативных данных.
- Взаимодействие человека и робота и коллаборативные роботы: люди не исчезнут со складов, но их роль сместится с ручного труда на мониторинг, управление и решение проблем. Разрабатываются коллаборативные роботы (коботы) и автоматизированные транспортные средства (AGV), которые будут безопасно и эффективно работать рядом с людьми. Эргономичные рабочие места типа «товар к человеку» или «товар к роботу», где люди и машины комплектуют заказы рука об руку, становятся стандартом.
- Интернет вещей (IoT) и полная взаимосвязь: склад будущего полностью объединен в сеть. Датчики на стеллажах, на машинах, на роботах и даже на самих погрузочных устройствах обеспечивают постоянный поток данных в режиме реального времени. Эти данные используются системами искусственного интеллекта для создания цифрового двойника склада, а также для управления и оптимизации физических процессов с беспрецедентной точностью.
- Устойчивое развитие и энергоэффективность: В свете роста цен на энергоносители и социального давления, устойчивость становится важнейшим критерием проектирования. Системы с низким энергопотреблением, такие как роботы AutoStore, способные снабжать друг друга энергией, или энергоэффективные приводы челночных систем, приобретают все большее значение. Продвижение экономики замкнутого цикла за счет оптимизации процессов возврата товаров также становится ключевым аспектом.
Будущие тенденции в интралогистике и их влияние
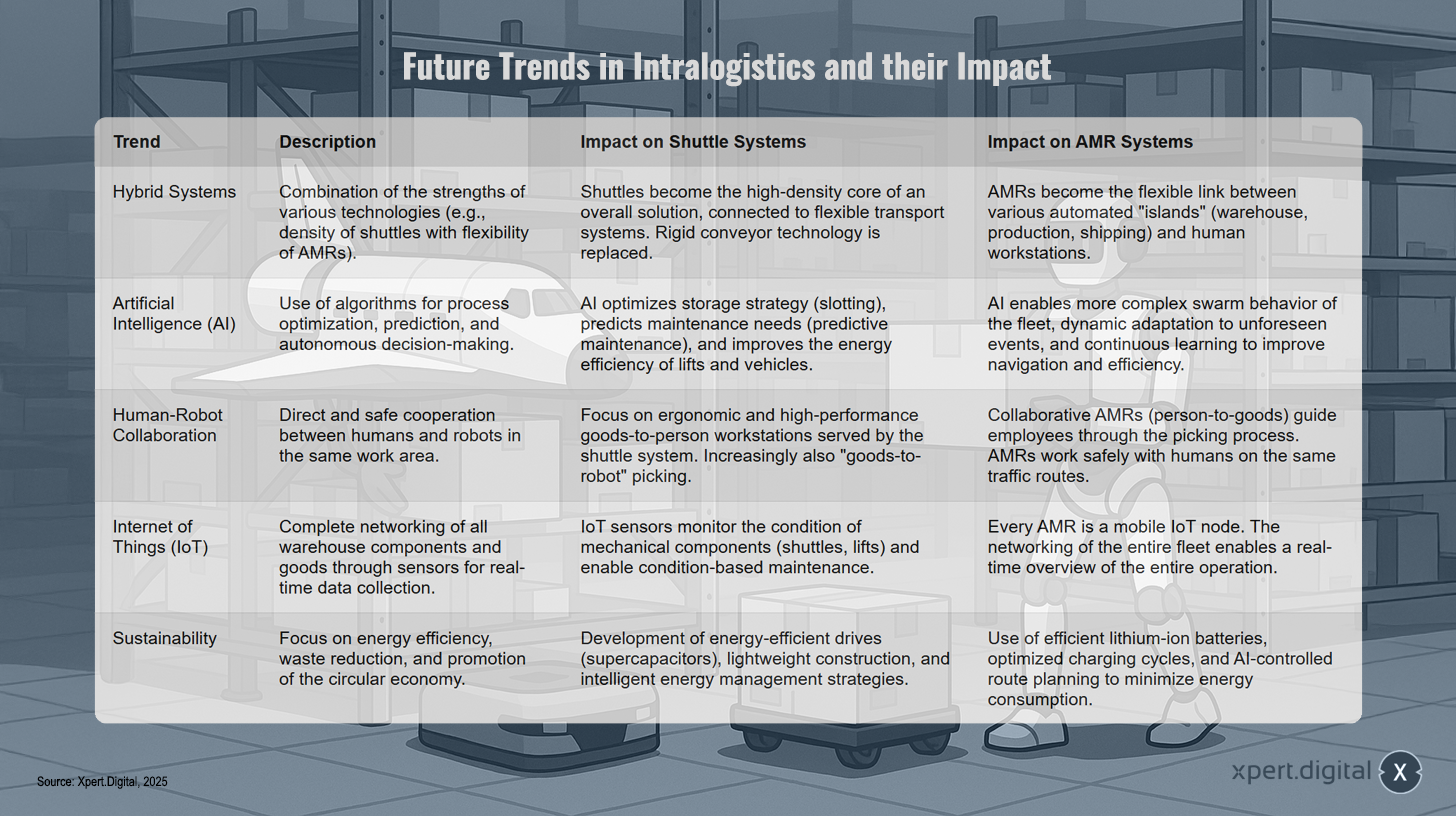
Будущие тенденции в интралогистике и их влияние – Изображение: Xpert.Digital
Будущее внутрилогистики будет определяться несколькими важными тенденциями, которые произведут революцию в производительности и эффективности логистических систем. Гибридные системы представляют собой ключевую стратегию, сочетающую в себе сильные стороны различных технологий. Челночные системы сформируют высокоплотное ядро комплексного решения, а автономные мобильные роботы (АМР) выступят в качестве гибкого связующего звена между различными автоматизированными зонами.
Искусственный интеллект (ИИ) играет ключевую роль в оптимизации процессов. Он позволяет не только улучшить стратегии управления запасами и прогнозируемое техническое обслуживание, но и обеспечить более сложное поведение роя роботов. Сотрудничество человека и робота становится важнейшим аспектом, где роботы работают безопасно и эргономично рядом с сотрудниками.
Интернет вещей (IoT) в режиме реального времени соединяет все компоненты склада, обеспечивая полную прозрачность. Каждый робот становится мобильным центром обработки данных, обмениваясь и анализируя информацию. В то же время все большее значение приобретает устойчивое развитие. Энергоэффективные приводы, оптимизированные аккумуляторные технологии и планирование маршрутов на основе искусственного интеллекта призваны минимизировать экологический след внутрискладской логистики.
Эти тенденции показывают, что будущее внутрипроизводственной логистики будет характеризоваться сетевым взаимодействием, интеллектуальными технологиями и устойчивым развитием, а также все более тесным сотрудничеством человека и технологий.
Сосуществование вместо конкуренции – какая система будет доминировать в будущем?
Таким образом, одна система вытеснит другую, или мы движемся к будущему сосуществования и гибридных решений?
После углубленного анализа технологий, их характеристик производительности, структуры затрат и будущих тенденций становится ясно одно: вопрос «челнок против робота» сформулирован неверно, если подразумевает замену одной системы другой. Идея единой, всеобъемлющей технологии — пережиток более простых времен. Будущее автоматизации складов будет определяться не одним победителем, а интеллектуальным, специализированным сосуществованием и растущей конвергенцией технологий.
Полного вытеснения не произойдет. Вместо этого системы будут преобладать в тех областях применения, где наилучшим образом используются их основные преимущества:
- Челночные системы (и их дальнейшие разработки, такие как кубические хранилища) будут по-прежнему доминировать там, где решающими критериями являются максимальная плотность хранения и чрезвычайно высокая, предсказуемая пропускная способность. Это относится к буферным хранилищам в промышленности, снабжению высокопроизводительных производственных линий, крупным центральным складам в секторе розничной торговли продуктами питания или к быстро реализуемым товарам в электронной коммерции.
- Автономные мобильные роботы (АМР) продемонстрируют свое превосходство во всех областях, где гибкость, быстрая масштабируемость и адаптивность к динамичным процессам имеют первостепенное значение. К ним относятся нестабильная среда электронной коммерции с сильно меняющимся профилем заказов, логистика третьих сторон (3PL) с часто меняющимися клиентами и требованиями, а также гибкие, модульные концепции производства.
Однако наиболее важной и определяющей тенденцией является конвергенция технологий и появление гибридных систем. Самые эффективные логистические центры будущего будут полагаться не на челночные транспортеры или автономные мобильные роботы (AMR), а на интегрированные, комплексные решения, сочетающие в себе лучшие качества обоих типов систем. Таким образом, доминирование будет обеспечиваться не какой-либо конкретной аппаратной технологией. Истинным победителем в гонке за будущее внутрилогистики станет программная экосистема. Интеллектуальные системы, способные бесперебойно координировать работу разнородных технологий — челночных транспортных средств, автономных мобильных роботов, коллаборативных роботов, конвейерных систем и ручных рабочих станций — в высокоэффективное, гибкое и отказоустойчивое целое, станут решающим конкурентным преимуществом.
Будущее промышленности будет определяться интеллектуальными, гибкими и гибридными экосистемами автоматизации, где выбор подходящего оборудования для конкретной задачи и его идеальная интеграция посредством превосходного программного обеспечения будут определять успех.


Оптимизация складских операций с помощью Xpert.Plus — высотные и палетные склады: консультации и планирование
Мы здесь для вас — Консультации — Планирование — Внедрение — Управление проектами
☑️ Язык ведения нашего бизнеса — английский или немецкий
☑️ НОВИНКА: Переписка на вашем родном языке!

Konrad Wolfenstein
Я и моя команда будем рады быть вашими личными консультантами.
Вы можете связаться со мной, заполнив контактную форму здесь wolfenstein@xpert.digital:или просто позвонив по номеру +49 7348 4088 965. Мой адрес электронной почты
Я с нетерпением жду начала нашего совместного проекта.