Тихая революция роботов-тяжеловесов в машиностроении: почему искусственный интеллект теперь является решающим фактором для создания самых мощных роботов – Creative image Xpert.Digital
Мощнее, чем когда-либо, и теперь еще и умнее: вот на что действительно способны новые суперроботы
### Забудьте о заводских цехах: эти роботы-гиганты теперь покоряют строительные площадки и ветряные электростанции ### Клетки больше не нужны: как многотонные роботы становятся безопасными помощниками для людей ### Решение проблемы нехватки квалифицированных рабочих? Эти роботы берут на себя самые сложные работы в мире ### Столкновение титанов: не сила, а программное обеспечение определяет, кто создаст лучшего робота ###
Эволюция силы: последние разработки в области высокопроизводительных роботов большой грузоподъемности
Сектор робототехники для тяжелых условий эксплуатации переживает глубокую трансформацию, выходящую далеко за рамки простого увеличения грузоподъемности и дальности действия. Последние разработки демонстрируют сдвиг парадигмы в сторону целостного подхода, в котором приоритет отдается интеллекту, адаптивности, удобству использования и разработке новых приложений. Программное обеспечение, искусственный интеллект (ИИ) и передовая мехатроника стали основными факторами, определяющими ценность, позволяя этим мощным машинам решать сложные задачи в динамичных условиях, часто в непосредственном взаимодействии с людьми. Ключевые тенденции включают в себя все большее размывание границ между традиционными промышленными роботами и системами сотрудничества (коботами), расширение в такие сектора, как строительство и возобновляемая энергетика, а также растущую важность общей стоимости владения (TCO) и устойчивого развития. Эти разработки определяют следующее поколение роботов для тяжелых условий эксплуатации, которые не только мощнее, но, что более важно, умнее, гибче и доступнее.
Новое поколение роботов большой грузоподъемности: переосмысление мощности и точности
Рынок тяжелых роботов трансформируется из чисто конкурентной борьбы за максимальную полезную нагрузку в диверсифицированный рынок, где на первый план выходят производительность и эффективность, специфичные для конкретных задач. Ведущие производители выделяют свою продукцию за счет сочетания мощности, скорости, компактности и продуманного дизайна.
Определение современного класса тяжелых грузовиков: это больше, чем просто грубая мощь
Мощные роботы предназначены для работы с грузами, как правило, начиная с 250 кг и/или требующими вылетом стрелы более 4 метров. Они составляют основу таких отраслей, как автомобилестроение, машиностроение, литейное производство и, все чаще, строительство, где они перемещают массивные компоненты, такие как блоки двигателей, стальные балки и целые кузова автомобилей. Диапазон грузоподъемности огромен, от нескольких сотен килограммов до нынешнего пика в 2300 кг.
Однако оценка современных роботов большой грузоподъемности претерпела изменения. Хотя максимальная полезная нагрузка остается ключевым критерием, все большее внимание уделяется комплексным показателям эффективности. К ним относятся соотношение полезной нагрузки к весу, требуемые габариты, энергопотребление и способность точно и динамично перемещать грузы с большими моментами инерции. Эти критерии отражают более глубокое понимание общей стоимости владения и требований современных гибких производственных сред.
Конкурентная среда и флагманские модели (2024-2026)
На рынке доминируют такие признанные игроки, как KUKA, Fanuc, ABB и Yaskawa, в то время как новые конкуренты, такие как китайская компания Estun, приобретают все большее значение. Стратегии этих компаний демонстрируют заметное расхождение, выходящее за рамки простого максимизации полезной нагрузки.
Компания Fanuc остается бесспорным лидером рынка в сегменте сверхтяжелых грузов со своей серией M-2000iA. Модель M-2000iA/2300 с грузоподъемностью 2,3 тонны является самым мощным в мире 6-осевым шарнирным роботом и идеально подходит для задач, требующих максимальной прочности, таких как подъем целых шасси автомобилей.
Компания KUKA придерживается стратегии оптимизации производительности. Серия KR FORTEC ultra, предлагающая грузоподъемность до 800 кг, отличается исключительно хорошим соотношением полезной нагрузки к весу и компактной конструкцией. Это достигается за счет инновационных конструктивных решений, таких как система двойных рычагов, повышающая жесткость без чрезмерного увеличения веса. Для паллетирования серия KR 1000 titan предлагает модели с грузоподъемностью до 1300 кг.
Компания ABB позиционирует свой флагманский робот IRB 8700 как самого быстрого робота в своем классе. Обладая грузоподъемностью до 800 кг (или 1000 кг при наклоненном запястье), он, как утверждается, обеспечивает на 25% более короткие циклы работы по сравнению с аналогичными моделями. ABB также подчеркивает его надежность благодаря упрощенной механической конструкции с одним двигателем и редуктором на ось, что снижает затраты на техническое обслуживание и общую стоимость владения.
Компания Yaskawa предлагает широкий ассортимент продукции, в который входит модель Motoman MH600 с грузоподъемностью 600 кг. Ее параллельная шарнирная конструкция обеспечивает высокую стабильность и жесткость, что особенно важно при обработке заготовок с большим моментом инерции. Серия GP предназначена для высокоскоростных операций.
На рынок также выходят такие новые конкуренты, как Estun и Kawasaki. Estun, крупнейший китайский производитель промышленных роботов, планирует запустить в Европе такие модели, как ER 13300 с грузоподъемностью 1000 кг. Kawasaki расширяет свой модельный ряд, представляя MXP710L (710 кг) и серию M, способную поднимать грузы до 1500 кг.
Эти различные подходы демонстрируют, что рынок роботов большой грузоподъемности эволюционировал от одномерной гонки за максимальной полезной нагрузкой к более дифференцированной конкурентной среде. Производители теперь конкурируют на основе специализированных характеристик производительности, адаптированных к конкретным требованиям заказчика – будь то максимальная сила, эффективность в ограниченных пространствах или максимальная скорость. Это позволяет пользователям выбирать решение, оптимизированное для их индивидуальных производственных условий, а не просто выбирать самую мощную доступную модель.
Роботы-гиганты: сравнение самых мощных промышленных роботов
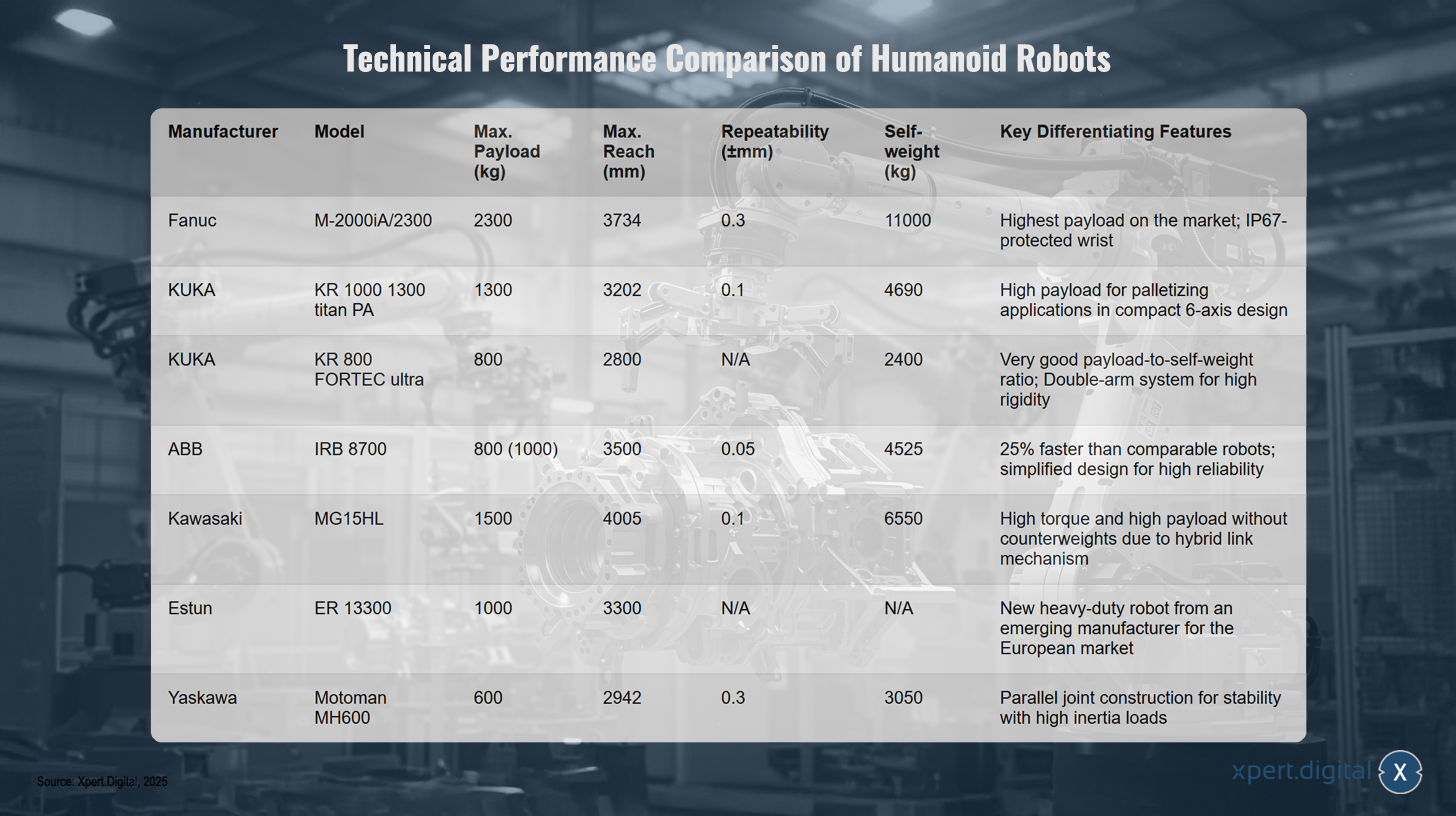
Роботы-гиганты: сравнение самых мощных промышленных роботов – Изображение: Xpert.Digital
В мире промышленных роботов есть несколько впечатляющих гигантов, выделяющихся своими огромными грузоподъемными возможностями и техническими характеристиками. Такие производители, как Fanuc, KUKA, ABB, Kawasaki, Estun и Yaskawa, борются за лидирующие позиции в этом сегменте рынка.
Робот Fanuc M-2000iA/2300 выделяется исключительной грузоподъемностью в 2300 кг, а также имеет защищенное от влаги и пыли запястье по стандарту IP67. Компания KUKA представляет KR 1000 1300 titan PA — робота с грузоподъемностью 1300 кг, идеально подходящего для паллетирования и отличающегося компактной 6-осевой конструкцией. Робот ABB IRB 8700 выигрывает за счет на 25% большей скорости по сравнению с аналогичными моделями и упрощенной конструкции для максимальной надежности.
В мотоцикле Kawasaki MG15HL используется гибридный рычажный механизм, обеспечивающий высокий крутящий момент и грузоподъемность без дополнительных противовесов. Yaskawa Motoman MH600 впечатляет своей параллельной рычажной системой, гарантирующей устойчивость при нагрузках с высокими моментами инерции.
Интересным новичком является Estun ER 13300, мощный робот, стремящийся завоевать европейский рынок. Эти роботы впечатляюще демонстрируют технологические достижения в области промышленной автоматизации и непрерывные инновации ведущих производителей.
Интеллектуальный двигатель: искусственный интеллект и программное обеспечение как ключевые отличительные особенности
Наиболее значительные достижения в области робототехники для тяжелых условий эксплуатации уже не носят чисто механический характер. Напротив, именно сочетание робототехники с искусственным интеллектом и передовым программным обеспечением коренным образом расширяет возможности этих машин и революционизирует их работу.
От автоматизации к автономности: влияние искусственного интеллекта и машинного обучения
Искусственный интеллект и машинное обучение (МО) превращают промышленных роботов из жестких, запрограммированных инструментов в адаптивные, интеллектуальные системы, способные воспринимать информацию, принимать решения и обучаться. Эта трансформация имеет решающее значение для управления изменчивостью и сложностью в современных производственных и логистических процессах.
Развитое восприятие («глаза»)
Современные роботы больше не действуют вслепую. Они оснащены высокотехнологичными сенсорными системами, включая системы 2D и 3D зрения, LiDAR и стереокамеры, которые обеспечивают им всестороннее понимание окружающей среды. Эта способность к восприятию обеспечивается алгоритмами глубокого обучения для распознавания, локализации и сегментации объектов, что делает возможным их использование в неструктурированных средах.
Пример использования – Выборка из контейнера: Системы, подобные KUKA.SmartBinPicking, используют передовые методы обработки изображений для идентификации объектов, расположенных случайным образом в контейнере, определения точек захвата и их безопасного извлечения – задача, практически невыполнимая при традиционном программировании на основе правил.
Пример применения – Обнаружение объектов на строительных площадках: В настоящее время активно разрабатываются модели распознавания объектов на основе алгоритма YOLO (You Only Look Once – «Только посмотри один раз»). Эти модели позволяют роботам идентифицировать рабочих, транспортные средства и строительные конструкции на динамичных строительных площадках, что является фундаментальным требованием для автономной работы в таких сложных условиях.
Интеллектуальное выполнение задач («мозг»)
Искусственный интеллект служит не только для зрения, но и для действий. Модели машинного обучения позволяют роботам адаптировать свои действия к меняющимся условиям в режиме реального времени.
Пример применения – разгрузка паллет с помощью ИИ: FANUC использует системы машинного зрения, управляемые ИИ, чтобы позволить роботам автономно разгружать смешанные паллеты с коробками разных размеров и положений. Такие системы могут обрабатывать более девяти коробок в минуту, заменяя тем самым крайне трудоемкий ручной труд.
Пример применения – Сварка с использованием ИИ: Системы нового поколения, такие как NovAI™, используют машинное зрение и ИИ для адаптивной сварки в реальном времени. Они могут отслеживать сварочные швы, адаптироваться к размерам зазоров и прихваточным швам, а также динамически корректировать параметры сварки. Это автоматизирует процессы, которые ранее считались слишком непостоянными для робототехники из-за допусков компонентов, и представляет собой значительный шаг вперед для тяжелого строительства в таких отраслях, как судостроение.
Революция в удобстве использования: упрощение сложных задач с помощью передового программного обеспечения
Традиционно программирование промышленных роботов было узкоспециализированной задачей, требующей глубоких знаний проприетарных языков программирования, таких как KRL (KUKA) или RAPID (ABB). Это создавало высокий барьер для внедрения и замедляло реализацию решений по автоматизации.
Операционные системы следующего поколения
Ведущие производители реагируют на это узкое место, разрабатывая новые, интуитивно понятные операционные системы, призванные сделать управление роботами доступным для всех.
KUKA iiQKA.OS: Современная операционная система на базе Linux с веб-интерфейсом (iiQKA.UI), разработанная для удобства использования, сравнимого со смартфоном. Она поддерживает программирование на основе инструкций, позволяет осуществлять виртуальный ввод в эксплуатацию и предназначена для развития целой экосистемы сторонних приложений и оборудования («Роботизированная республика»).
FANUC iHMI: «Интеллектуальный человеко-машинный интерфейс» — это графический интерфейс пользователя на основе сенсорного экрана, разработанный для значительного сокращения времени настройки и обучения. Он объединяет инструменты планирования, редактирования и улучшения, такие как оценка времени цикла и управление техническим обслуживанием, в единый, удобный для пользователя интерфейс.
Демократизация программирования
Тенденция явно движется в сторону взаимодействия без кода или с минимальным количеством кода. Визуальные среды программирования с функцией перетаскивания и графическими редакторами рабочих процессов становятся стандартом. Методы «обучения на практике», когда оператор вручную направляет манипулятор робота во время движения (ручное управление) или использует внешние инструменты, такие как Wandelbots Tracepen, для «демонстрации» задачи роботу, еще больше снижают барьер программирования.
Сила моделирования (цифровые двойники)
Программное обеспечение для офлайн-программирования и моделирования, такое как KUKA.Sim или ABB RobotStudio, стало незаменимым инструментом. Оно позволяет компаниям виртуально проектировать, тестировать и оптимизировать целые роботизированные ячейки еще до заказа физического оборудования. Такая «виртуальная наладка» значительно сокращает фактическое время настройки, минимизирует риски за счет раннего обнаружения столкновений или проблем с доступом и позволяет проводить программирование параллельно с закупкой оборудования.
Эти разработки указывают на фундаментальный сдвиг в робототехнике. Производители больше не просто продают роботизированную руку с контроллером, а создают целые цифровые платформы. Эти платформы включают операционные системы, магазины приложений, партнерские сети и облачные возможности. KUKA активно продвигает партнерскую экосистему («Robotic Republic») для iiQKA с открытыми интерфейсами для сторонних поставщиков. В то же время такие платформы, как ctrlX AUTOMATION от Bosch Rexroth, позволяют управлять роботами различных марок (ABB, KUKA, FANUC) через единый интерфейс. Это развитие отражает трансформацию на рынке смартфонов, где ценность устройства во многом определяется его экосистемой приложений. Таким образом, конкурентная среда смещается от чисто аппаратных характеристик к силе и открытости программной экосистемы. Для пользователей это означает меньшую зависимость от одного производителя, более быстрые инновации и доступ к более широкому спектру специализированных решений. Робот становится аппаратной платформой, на которой строится программно-определяемое решение для автоматизации.
🎯🎯🎯 Воспользуйтесь обширным пятисторонним опытом Xpert.Digital в одном комплексном пакете услуг | Развитие бизнеса, НИОКР, XR, PR и оптимизация цифровой видимости


Воспользуйтесь обширным пятисторонним опытом Xpert.Digital в рамках комплексного пакета услуг | НИОКР, XR, PR и оптимизация цифровой видимости - Изображение: Xpert.Digital
Компания Xpert.Digital обладает глубокими знаниями в различных отраслях. Это позволяет нам разрабатывать индивидуальные стратегии, точно соответствующие требованиям и задачам вашего конкретного сегмента рынка. Благодаря постоянному анализу рыночных тенденций и мониторингу отраслевых разработок мы можем действовать на опережение и предлагать инновационные решения. Сочетание опыта и экспертных знаний создает добавленную стоимость и обеспечивает нашим клиентам решающее конкурентное преимущество.
Более подробная информация здесь:
Новая мехатроника: как мощные роботы преодолевают физические ограничения
Передовая мехатроника: физическая эволюция энергетики
Наряду со стремительным развитием программного обеспечения и искусственного интеллекта, меняется и физическая форма роботов большой грузоподъемности. Инновации в проектировании, материаловедении и технологии концевых захватов имеют решающее значение для преобразования этого возросшего интеллекта в механические характеристики.
Инновации в дизайне и материалах: повышение производительности при меньшей массе
Ключевой тенденцией является разработка более легких и компактных роботов, обладающих при этом той же или даже большей грузоподъемностью. Например, KUKA KR Fortec на 700 кг легче своего предшественника, а серия KR FORTEC ultra может похвастаться лучшим в своем классе соотношением грузоподъемности к весу. Такое снижение веса уменьшает требования к фундаменту, снижает энергопотребление и позволяет использовать роботов в густонаселенных и ограниченных по площади производственных помещениях.
Это стало возможным благодаря передовым кинематическим решениям. Двухрычажная система KUKA и высокопрочные конструкции манипуляторов Fanuc повышают точность и снижают вибрации на высоких скоростях и при больших нагрузках. Гибридный рычажный механизм Kawasaki устраняет необходимость в громоздких противовесах, тем самым увеличивая рабочее пространство робота.
Еще одним важным аспектом является модульность. В робототехнических сериях, подобных тем, что выпускает KUKA (KR Quantec, Fortec, Fortec ultra), все чаще используются общие компоненты, например, центральные манипуляторы. Это упрощает техническое обслуживание и снижает затраты на складские запасы запасных частей для клиентов, эксплуатирующих разнообразный парк роботов.
Для использования в экстремальных условиях в стандартную комплектацию теперь входят специализированные варианты, такие как «литейные» или «гигиенические» версии. Эти модели имеют запястья и корпуса с защитой IP67, термо- и коррозионностойкое покрытие, а также смазочные материалы пищевого класса, что позволяет использовать их в литейных цехах, кузницах или на предприятиях пищевой промышленности.
Исполнительные механизмы нового поколения: Руки робота
Захваты на конце роботизированной руки, известные как концевые эффекторы, эволюционируют от простых пневматических зажимов до сложных мехатронных систем. Они все чаще оснащаются передовыми датчиками, обеспечивающими адаптивную функциональность. Хотя они по-прежнему преимущественно используются в приложениях с меньшей грузоподъемностью, принципы мягкой робототехники и бионики оказывают влияние на технологию захватов. Цель состоит в том, чтобы с большей надежностью и меньшим усилием манипулировать объектами различной формы и материала. Для тяжелых и сложных объектов разрабатываются многоосевые, полностью управляемые механизмы, обеспечивающие точное манипулирование.
Датчики силы и крутящего момента, закрепленные на запястье, обеспечивают роботу «осязание». Они позволяют ему выполнять деликатные задачи, такие как точное соединение компонентов, приложение заданной силы во время шлифовки или безопасное реагирование на неожиданные столкновения.
Экосистема датчиков: основа для восприятия и безопасности
Современные роботы большой грузоподъемности полагаются на богатую экосистему внутренних и внешних датчиков. Внутренние датчики, такие как энкодеры двигателей и датчики крутящего момента в шарнирах, необходимы для точного управления движением. Внешние датчики, такие как 3D-камеры, LiDAR и ультразвуковые датчики, предоставляют данные для восприятия окружающей среды и обеспечивают безопасное взаимодействие человека и робота. Интегрированные системы защиты от столкновений и перегрузок могут инициировать аварийную остановку в случае столкновения или чрезмерной нагрузки, тем самым защищая как робота, так и обрабатываемую деталь. Эти системы становятся все более сложными и теперь предлагают такие функции, как пневматически регулируемые пороговые значения срабатывания.
Устойчивое развитие и эффективность: акцент на общей стоимости владения (TCO)
Энергоэффективность стала ключевой целью проектирования. Благодаря облегченным конструкциям, оптимизированным программным обеспечением траекториям движения и энергосберегающим режимам ожидания производители снижают энергопотребление своих роботов. Это не только снижает эксплуатационные расходы, но и улучшает экологический след автоматизированного решения. Упрощенные механические конструкции, такие как те, что использует ABB, где на каждую ось приходится всего один двигатель, и модульная конструкция приводят к повышению надежности (среднее время между отказами, MTBF) и сокращению времени ремонта (среднее время до ремонта, MTTR), что еще больше снижает общие эксплуатационные расходы.
Достижения в области мехатроники тесно переплетены с разработками в сфере программного обеспечения и искусственного интеллекта. Более жесткая, менее подверженная вибрациям конструкция манипулятора (улучшение аппаратной части) является необходимым условием для создания усовершенствованного программного обеспечения управления движением (улучшение программного обеспечения), позволяющего роботу двигаться быстрее и точнее. Алгоритмы планирования траектории на основе ИИ могут затем рассчитать наиболее энергоэффективную траекторию именно для этой кинематики. Встроенные датчики силы и крутящего момента, в свою очередь, обеспечивают обратную связь в реальном времени, позволяя программному обеспечению управления реагировать на непредвиденные силы и повышать надежность процесса. Таким образом, производительность современного тяжелого робота является результатом взаимодействия всей системы, в которой механика, датчики и программное обеспечение неразрывно связаны.
Расширение горизонтов: новые области применения робототехники для тяжелых условий эксплуатации
Технологические достижения в области искусственного интеллекта, программного обеспечения и мехатроники позволяют использовать роботов большой грузоподъемности в отраслях, которые ранее полагались на ручной труд или жесткую автоматизацию. Роботы покидают контролируемые заводские цеха и покоряют динамичные и неструктурированные среды.
Автоматизированная строительная площадка
Строительная отрасль сталкивается с огромными проблемами из-за нехватки квалифицированных рабочих, высоких рисков для безопасности и растущего давления на производительность труда. В результате 81% строительных компаний планируют внедрить роботов в течение следующих десяти лет.
Области применения: Мощные роботы обрабатывают массивные компоненты, такие как стальные профили, сборные железобетонные элементы и модульные жилые блоки. Они используются в автоматизированном производстве, например, для сверления, клепки и крепления крупных компонентов. Конкретным примером является робот Fischer BauBot, разработанный специально для сверления и анкеровки на крупных строительных площадках. Роботы также могут быть оснащены режущими инструментами для высокоточной обработки бетонных и стальных компонентов непосредственно на месте.
Ключевые технологии: Успех в этой неструктурированной среде критически зависит от распознавания объектов на основе искусственного интеллекта для идентификации материалов и препятствий, а также от надежных мобильных платформ.
Энергия будущего: автоматизация в производстве возобновляемых источников энергии
Масштабное расширение использования возобновляемых источников энергии требует более быстрого и экономичного производства и установки крупных компонентов, таких как лопасти ветряных турбин и солнечные электростанции.
Ветроэнергетика: При производстве лопастей ветряных турбин роботы используются для постобработки (обрезка, шлифовка, заполнение), что повышает качество и освобождает рабочих от опасных задач. В автоматизированной укладке волокна (AFP) роботизированные манипуляторы точно укладывают полосы углеродного или стекловолокна для получения более легких и прочных лопастей ротора. Специальные роботизированные системы обрабатывают основание лопасти (пиление, фрезерование, сверление) и сокращают время цикла до 50% по сравнению с традиционными станками.
Солнечная энергия: такие компании, как Charge Robotics и Terabase, разрабатывают мобильные «заводы», которые автоматически предварительно собирают и устанавливают целые секции солнечных модулей непосредственно на строительных площадках солнечных электростанций, потенциально удваивая производительность. Робот «Maximo» от AES использует искусственный интеллект, LiDAR и машинное зрение для автоматизации тяжелых работ по подъему и сборке солнечных панелей, сокращая время и затраты до 50%. Система Hyperflex от Comau представляет собой мобильный завод, размещенный в полуприцепе, который собирает и устанавливает солнечные трекеры непосредственно на месте.
Модернизация тяжелой промышленности: судостроение и аэрокосмическая отрасль
Судостроение: Эта традиционно малоавтоматизированная отрасль начинает использовать мобильные роботы большой грузоподъемности. MR4Weld, разработанный компанией Comau в сотрудничестве с верфью Fincantieri, представляет собой автономного мобильного сварочного робота, способного перемещаться по неструктурированной среде верфи для выполнения сварочных работ на больших секциях корпуса. Это обеспечивает новую гибкость и эффективность при сборке массивных стальных конструкций.
Аэрокосмическая отрасль: Здесь высокоточные роботы большой грузоподъемности используются для сверления, клепки и соединения крупных компонентов самолетов, таких как крылья и детали фюзеляжа, где требуется высочайшая точность и повторяемость.
Замыкание цикла: роль в циклической экономике
Цели в области устойчивого развития и правила ЕС обуславливают необходимость эффективной переработки и повторного использования сложных продуктов.
Автоматизированная разборка: Мощные роботы идеально подходят для разборки крупных и тяжелых изделий.
Аккумуляторы электромобилей: Из-за их большого веса и потенциальных опасностей (электрических, химических) роботизированная разборка аккумуляторов электромобилей является важнейшим фактором безопасной и экономичной переработки. В рамках исследовательских проектов разрабатываются роботизированные ячейки, которые автоматически разделяют аккумуляторные модули и ячейки.
Крупногабаритная электроника и электродвигатели: Институт Фраунгофера работает над роботизированными системами, использующими искусственный интеллект и машинное зрение для автоматической разборки персональных компьютеров, стиральных машин и электродвигателей с целью извлечения ценных материалов, таких как медь и редкоземельные магниты. Это важный шаг на пути к созданию «городской добычи полезных ископаемых».
Эти новые области применения объединяет одна общая черта: они переводят робота из строго структурированной, предсказуемой среды заводского цеха в динамичное, неструктурированное и зачастую суровое «поле». Это изменение среды является основным двигателем технологического развития в области искусственного интеллекта, сенсорных технологий и мехатроники. Техническая задача смещается от оптимизации повторяющихся движений к управлению неопределенностью. Будущий успех будет зависеть не столько от постепенных улучшений скорости или точности, сколько от прорывов в области восприятия окружающей среды, автономной навигации и адаптивного планирования задач.
Наша рекомендация: 🌍 Безграничный охват 🔗 Взаимосвязь 🌐 Многоязычность 💪 Эффективность продаж: 💡 Подлинность в сочетании со стратегией 🚀 Инновации в сочетании с 🧠 Интуицией


От локального к глобальному: малые и средние предприятия завоевывают мировой рынок благодаря продуманной стратегии - Изображение: Xpert.Digital
В эпоху, когда цифровое присутствие компании определяет ее успех, задача состоит в создании аутентичного, персонализированного и широкомасштабного присутствия. Xpert.Digital предлагает инновационное решение, позиционирующее себя как сочетание отраслевого центра, блога и представителя бренда. Оно объединяет преимущества коммуникационных и торговых каналов на единой платформе и позволяет публиковать контент на 18 языках. Сотрудничество с партнерскими порталами и возможность публикации статей в Google News, а также рассылка для прессы, насчитывающая около 8000 журналистов и читателей, максимизируют охват и видимость контента. Это является решающим фактором во внешних продажах и маркетинге (SMarketing).
Более подробная информация здесь:
Рост, возможности, препятствия: стратегии для робототехники большой грузоподъемности
Граница сотрудничества: безопасное взаимодействие человека и робота при больших нагрузках
Новая и, казалось бы, противоречивая тенденция — это применение принципов сотрудничества к роботам, способным применять потенциально смертельные силы. Это развитие превращает тяжелых роботов из изолированных машин в мощных членов команды.
За пределами клетки: спектр сотрудничества
Традиционная концепция безопасности, предполагающая эксплуатацию тяжелых роботов в защитных ограждениях, неэффективна и создает жесткое разделение между задачами человека и машины. Однако современное взаимодействие человека и робота (HRC) — это не единая концепция, а спектр, простирающийся от простого сосуществования (робот останавливается, когда человек входит в его рабочую зону) до тесного сотрудничества (человек и робот работают одновременно над одной и той же заготовкой).
Ключевое преимущество этого подхода заключается в том, что, в отличие от традиционных легких коллаборативных роботов, промышленные коллаборативные роботы не имеют ограничений по грузоподъемности, скорости или точности. Таким образом, они предлагают лучшее из двух миров: производительность промышленного робота и гибкость коллаборативного применения.
Ключевые технологии для безопасной эксплуатации тяжелых грузовых автомобилей MRK
Безопасное взаимодействие человека и робота в условиях работы с тяжелыми роботами обеспечивается сочетанием передовых датчиков и интеллектуальных функций управления.
Усовершенствованные датчики безопасности: Основой безопасного взаимодействия человека и робота (HRC) является способность системы обнаруживать присутствие человека и его намерения. Это достигается с помощью сертифицированных по стандартам безопасности лазерных сканеров, 3D-камер и даже чувствительных к давлению полов, которые создают динамические многослойные защитные поля вокруг робота.
Мониторинг скорости и расстояния (SSM): это ключевой метод взаимодействия, при котором скорость робота обратно пропорциональна расстоянию до человека. По мере приближения человека робот замедляется. Если человек подходит слишком близко, робот безопасно останавливается под контролем системы. Это обеспечивает плавное и эффективное взаимодействие без физических препятствий.
Ограничение мощности и силы (PFL): Несмотря на сложность задачи из-за высокой инерции тяжелых роботов, передовые системы управления и датчики крутящего момента в каждом шарнире позволяют даже крупным роботам работать в режиме ограничения силы для выполнения определенных задач. Они немедленно останавливаются при неожиданном контакте. Эта функция часто используется для ручного управления или перемещения.
Стандартизация и оценка рисков: Внедрение безопасных приложений для взаимодействия человека и робота регулируется такими стандартами, как EN ISO 10218 и техническая спецификация ISO/TS 15066. Фундаментальным требованием всегда является тщательная оценка рисков всего приложения – то есть робота, захвата, обрабатываемой детали и окружающей среды. Даже робот, который по своей природе безопасен, может работать с опасным инструментом.
Эти разработки приводят к переосмыслению термина «кобот». Традиционно этот термин был синонимом небольших, легких и по своей природе безопасных роботизированных манипуляторов. Интеграция функций совместной работы в тяжелые промышленные роботы разрушает эту парадигму. «Совместная работа» превращается из существительного (тип робота, «кобот») в прилагательное или набор функций («применение совместного робота»). Будущее заключается не в бинарном выборе между «коботом» и «промышленным роботом», а в выборе промышленного робота с соответствующей полезной нагрузкой и производительностью, который затем оснащается необходимыми для конкретного применения функциями безопасности совместной работы. Это значительно расширяет потенциал взаимодействия человека и робота (HRC) в областях, ранее недоступных для тесного взаимодействия человека и машины, таких как тяжелая сборка или логистика.
RaaS объясняет: как компании могут снизить барьер для внедрения роботов
Рынок роботов большой грузоподъемности готов к устойчивому росту, обусловленному технологическими инновациями и расширением в новые сектора. Однако для успешной реализации компаниям необходимо принимать стратегические решения, выходящие за рамки простой оценки технологий.
Размер рынка и прогнозы роста
Глобальный рынок промышленной робототехники является значительным и растущим сектором. Прогнозы размера рынка различаются в зависимости от масштаба и методологии анализа, но неизменно демонстрируют положительную тенденцию
- Согласно прогнозам, объем рынка вырастет с 33,9 млрд долларов США в 2024 году до 60,5 млрд долларов США к 2030 году, что соответствует среднегодовому темпу роста (CAGR) в 9,9%.
- Другое исследование прогнозирует рост с 16,9 млрд долларов США (2024 г.) до 29,4 млрд долларов США к 2029 году (среднегодовой темп роста 11,7%).
- Третий прогноз предсказывает рост с 19,9 млрд долларов США (2024 г.) до 55,5 млрд долларов США к 2032 году (среднегодовой темп роста 14,2%).
Объем рынка «тяжелых роботизированных платформ» в 2024 году оценивался в 333,5 млн долларов США, а к 2030 году прогнозируется его рост до 446,0 млн долларов США (среднегодовой темп роста 5,0%). Расхождение с общими показателями свидетельствует о том, что тяжелые роботы представляют собой сегмент рынка, требующий значительных финансовых затрат, но занимающий меньшую, чем в среднем, долю.
Согласно данным Международной федерации робототехники (IFR), в 2023 году мировой парк действующих промышленных роботов достиг рекордного уровня в 4,28 миллиона единиц, что на 10% больше, чем в предыдущем году. Хотя в 2024 году наблюдалось временное сокращение рынка, ожидается, что долгосрочная тенденция роста возобновится с 2025 года. Азия, особенно Китай, остается крупнейшим и наиболее быстрорастущим рынком, на который приходится 70% новых установок.
Ключевые факторы роста и препятствия
Факторы роста:
- Нехватка квалифицированных кадров и демографические изменения: во многих промышленно развитых странах нехватка квалифицированных работников приводит к автоматизации физически тяжелых и монотонных задач.
- Индустрия 4.0 и интеллектуальное производство: для объединения производства в сети и его цифровизации центральными компонентами являются интеллектуальные и гибкие роботы.
- Развитие новых секторов: Рост все чаще обеспечивается за счет внедрения технологий в отрасли, выходящие за рамки автомобильной промышленности, такие как логистика, строительство и возобновляемые источники энергии.
- Устойчивое развитие и возвращение производства в страну: роботы повышают эффективность использования материалов, сокращают количество отходов и позволяют осуществлять экономически эффективное производство в собственной стране.
Препятствия:
- Высокие первоначальные инвестиции: затраты на робота, его интеграцию и необходимое периферийное оборудование представляют собой значительное препятствие, особенно для малых и средних предприятий (МСП).
- Сложность интеграции: Несмотря на более удобные пользовательские интерфейсы, интеграция роботов в существующие устаревшие системы и обеспечение совместимости могут оставаться сложной задачей.
Стратегические императивы для реализации
Для компаний, рассматривающих возможность использования роботов большой грузоподъемности, крайне важны следующие стратегические соображения:
- Переключение внимания с капитальных затрат (Capex) на общую стоимость владения (TCO) и рентабельность инвестиций (ROI): решения об инвестициях не должны основываться исключительно на цене покупки. Необходим комплексный анализ общей стоимости владения (TCO), включая энергопотребление, техническое обслуживание и доступность, а также рентабельности инвестиций (ROI), обусловленной повышением производительности, улучшением качества и снижением затрат на рабочую силу.
- Использование новых бизнес-моделей: такие модели, как «Робототехника как услуга» (RaaS), снижают барьер первоначальных инвестиций, позволяя компаниям арендовать возможности роботов в качестве операционных расходов, а не вкладывать капитальные средства.
- Инвестиции в развитие персонала: упрощение программирования не устраняет необходимость в квалифицированных сотрудниках. Скорее, оно переносит необходимые навыки с чистого программирования на задачи более высокого уровня, такие как оптимизация процессов, мониторинг и обслуживание систем. Компании должны инвестировать в повышение квалификации своих сотрудников, чтобы эффективно управлять этими интеллектуальными машинами и взаимодействовать с ними.
- Приоритет программного обеспечения и экосистем: при выборе робота ключевыми критериями должны быть программная платформа производителя, простота ее использования и широта партнерской экосистемы. Развитая экосистема обеспечивает доступ к предварительно интегрированным решениям и защищает инвестиции от изменения требований в будущем.
Мы здесь для вас — Консультации — Планирование — Внедрение — Управление проектами
☑️ Поддержка малых и средних предприятий в области стратегии, консалтинга, планирования и реализации проектов
☑️ Разработка или корректировка цифровой стратегии и цифровизации
☑️ Расширение и оптимизация международных процессов продаж
☑️ Глобальные и цифровые торговые платформы B2B
☑️ Развитие новаторского бизнеса

Konrad Wolfenstein
Я с удовольствием стану вашим личным консультантом.
Вы можете связаться со мной, заполнив форму обратной связи ниже, или просто позвонить мне по номеру +49 7348 4088 965 .
Я с нетерпением жду начала нашего совместного проекта.
Напишите мне



Xpert.Digital - Konrad Wolfenstein
Xpert.Digital — это центр для предприятий, специализирующийся на цифровизации, машиностроении, логистике/внутрипроизводственной логистике и фотовольтаике.
С помощью нашего комплексного решения для развития бизнеса мы поддерживаем известные компании на всех этапах, от привлечения новых клиентов до послепродажного обслуживания.
Анализ рынка, маркетинговый маркетинг, автоматизация маркетинга, разработка контента, PR, почтовые рассылки, персонализированные кампании в социальных сетях и работа с потенциальными клиентами — все это входит в число наших цифровых инструментов.
Более подробную информацию можно найти по ссылкам: www.xpert.digital - www.xpert.solar - www.xpert.plus
Поддерживать связь