Тактильная робототехника: Роботы с чувством осязания: Новое поколение от Vulcan и MIT в области тактильного распознавания объектов – Изображение: Xpert.Digital
Система распознавания объектов Массачусетского технологического института без специальных датчиков и робот Vulcan от Amazon
Тактильное восприятие для машин: установление новых стандартов в распознавании объектов
В области робототехники разработка тактильных датчиков и систем распознавания знаменует собой решающий шаг вперед, впервые позволяя машинам не только видеть окружающую среду, но и «чувствовать» ее. Примером такого развития являются новый робот Vulcan от Amazon и инновационная система распознавания объектов от MIT. Обе технологии значительно расширяют возможности роботов и позволяют выполнять задачи, которые ранее могли быть выполнены только людьми с помощью их естественного тактильного восприятия.
В связи с этим:


Робот «Вулкан» от Amazon: прорыв в области тактильного захвата роботами
Функционирование и технологические основы
Робот Vulcan, разработанный компанией Amazon, представляет собой значительный технологический прорыв в области физического искусственного интеллекта. Сама Amazon описывает эту разработку как «прорыв в робототехнике и физическом ИИ». Система состоит из двух основных компонентов: «Stow» для хранения объектов и «Pick» для их извлечения. Ее выдающейся особенностью является способность тактильно воспринимать окружающую среду.
Технологическая основа тактильных возможностей робота Vulcan состоит из специальных датчиков силы и крутящего момента, выполненных в форме хоккейной шайбы, которые позволяют роботу «чувствовать», какую силу он может приложить, чтобы захватить объект, не повредив его. Адам Парнесс, директор по робототехнике и искусственному интеллекту в Amazon, подчеркивает уникальность этого подхода: «Vulcan — не первый наш робот, способный перемещать объекты. Но благодаря своему осязанию — способности понимать, когда и как он вступает в контакт с объектом — он открывает новые возможности для оптимизации рабочих процессов и производственных площадей».
Для сортировки товаров на полках Вулкан использует инструмент, похожий на линейку, прикрепленную к выпрямителю для волос. С помощью этой «линейки» он отодвигает другие товары, чтобы освободить место для новых. Захватные рычаги регулируют силу захвата в зависимости от размера и формы предмета, а встроенные конвейерные ленты проталкивают предмет в контейнер. Для извлечения предметов Вулкан использует вакуумный захват в сочетании с системой камер.
Текущие области применения и производительности
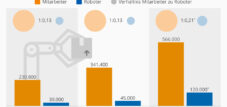
В настоящее время робот Vulcan проходит тестирование в двух логистических центрах Amazon: в Винзене недалеко от Гамбурга (Германия) и в Спокане, штат Вашингтон (США). В Вашингтоне работают шесть роботов Stow Vulcan, которые уже успешно разместили полмиллиона товаров. В Винзене работают два робота Pick Vulcan, которые уже обработали 50 000 заказов.
Возможности системы поразительны: в настоящее время Vulcan может обрабатывать примерно 75 процентов из миллионов товаров, предлагаемых Amazon. Минимальный размер объекта, с которым может работать робот, примерно эквивалентен губной помаде или USB-накопителю. Особенно впечатляет способность робота идентифицировать объекты в режиме реального времени, поскольку, как объясняет Парнесс, «ему было бы невозможно знать все характеристики предметов наизусть».
Планы на будущее и интеграция в логистическую цепочку
Компания Amazon планирует значительно увеличить количество роботов Vulcan в ближайшие годы. В этом году ожидается, что число роботов Vulcan в Винзене увеличится до 60, а в Вашингтоне — до 50. Долгосрочный план предусматривает развертывание роботов в логистических центрах по всей Европе и США.
Ключевым аспектом стратегии Amazon является сосуществование людей и машин. «Генеральный план» компании предусматривает совместную работу людей и машин. Роботы в первую очередь предназначены для перемещения товаров на полках, до которых человек не может дотянуться без лестницы или для чего потребуется сильно наклоняться. Ожидается, что это приведет к повышению общей эффективности и одновременно снизит рабочую нагрузку на сотрудников.
Система обнаружения объектов, разработанная в MIT, посредством манипулирования: интеллектуальное «ощущение» без специальных датчиков
Инновационный подход к распознаванию объектов
Параллельно с разработкой робота Vulcan от Amazon исследователи из Массачусетского технологического института, Amazon Robotics и Университета Британской Колумбии разработали систему, которая использует иной подход к наделению роботов тактильными способностями. Эта технология позволяет роботам распознавать свойства объекта, такие как вес, мягкость или содержимое, просто взяв его в руки и слегка встряхнув — подобно тому, как это делают люди при обращении с незнакомыми предметами.
Особенность этого подхода заключается в том, что не требуются специальные тактильные датчики. Вместо этого система использует энкодеры суставов, уже имеющиеся в большинстве роботов, — датчики, которые определяют положение и скорость вращения суставов во время движения. Питер Ичен Чен, научный сотрудник Массачусетского технологического института и ведущий автор исследовательской статьи, объясняет концепцию проекта: «Моя мечта — отправить роботов в мир, чтобы они могли трогать и перемещать предметы и самостоятельно определять свойства всего, с чем они взаимодействуют».
Технические характеристики и имитационные модели
В основе системы MIT лежат две имитационные модели: одна имитирует робота и его движения, а другая воспроизводит динамику объекта. Чао Лю, еще один научный сотрудник MIT, подчеркивает важность этих цифровых двойников: «Точная цифровая копия реального мира действительно необходима для успеха нашего метода».
Система использует метод, называемый «дифференцируемым моделированием», который позволяет алгоритму предсказывать, как небольшие изменения свойств объекта, таких как масса или мягкость, повлияют на конечное положение суставов робота. Как только моделирование совпадает с фактическими движениями робота, система определяет правильные свойства объекта.
Ключевое преимущество этого метода — его эффективность: алгоритм может выполнять вычисления за считанные секунды и для работы требует лишь реальной траектории движения робота. Это делает систему особенно экономичной и практичной для реальных задач.
Потенциал применения и преимущества
Разработанная технология может оказаться особенно полезной в тех областях, где камеры менее эффективны, например, при сортировке предметов в темном подвале или расчистке завалов в частично обрушившемся здании после землетрясения.
Поскольку алгоритму не требуется большой набор данных для обучения, в отличие от некоторых методов, основанных на компьютерном зрении или внешних датчиках, он менее подвержен ошибкам при столкновении с неизвестной средой или новыми объектами. Это делает систему особенно надежной и универсальной.
Более широкий обзор исследований тактильных датчиков в робототехнике
Основные проблемы и существующие решения
Разработка роботов с тактильными ощущениями ставит перед исследователями фундаментальные задачи. В то время как человеческая тактильная система чрезвычайно сложна и многогранна, искусственные системы должны воспроизводить её с помощью технологических средств. Кен Голдберг, робототехник из Калифорнийского университета в Беркли, подчеркивает сложность этой задачи: «Чувство осязания человека невероятно многогранно и сложно, с огромным динамическим диапазоном. Хотя роботы быстро развиваются, я был бы удивлен, если бы в ближайшие пять-десять лет появились тактильные датчики, сопоставимые с человеческими».
Несмотря на эти трудности, в исследованиях достигнут значительный прогресс. Например, институт Fraunhofer IFF разрабатывает системы тактильных датчиков, которые позволяют осуществлять реактивный захват, имитирующий человеческую руку, и идеально подходят для работы с хрупкими или гибкими объектами. Данные с датчиков используются для адаптации захватного устройства, распознавания компонентов и положения, а также для мониторинга процессов.
Инновационные исследовательские проекты в области тактильной робототехники
Помимо разработок Amazon и MIT, существуют и другие значимые исследовательские проекты в области тактильных датчиков для роботов:
Институт интеллектуальных систем им. Макса Планка разработал тактильный датчик Insight, обладающий высокой чувствительностью к прикосновениям. Георг Мартиус, руководитель исследовательской группы института, подчеркивает преимущества датчика: «Наш датчик демонстрирует выдающиеся характеристики благодаря инновационной механической конструкции корпуса, специально разработанной системе визуализации внутри, автоматическому сбору данных и передовым методам глубокого обучения». Датчик настолько чувствителен, что может даже определять собственную ориентацию относительно силы тяжести.
Еще один интересный проект — DensePhysNet, система, которая активно выполняет последовательность динамических взаимодействий (например, скольжение и столкновение) и использует глубокую прогностическую модель на основе визуальных наблюдений для обучения плотным, попиксельным представлениям, отражающим физические свойства наблюдаемых объектов. Эксперименты как в симуляционных, так и в реальных условиях показывают, что полученные представления содержат богатую физическую информацию и могут быть непосредственно использованы для расшифровки физических свойств объектов, таких как трение и масса.
В связи с этим:

Перспективы развития тактильных робототехнических систем
Интеграция многомодальных сенсорных систем
Будущее тактильной робототехники заключается в интеграции различных сенсорных модальностей. Исследователи из Массачусетского технологического института уже работают над обучением искусственного интеллекта объединению таких чувств, как зрение и осязание. Понимая, как взаимодействуют эти различные сенсорные модальности, роботы смогут развить более целостное понимание окружающей среды.
Команда из Массачусетского технологического института уже планирует объединить свой метод обнаружения объектов с компьютерным зрением для создания еще более мощной мультимодальной сенсорной системы. «Эта работа не ставит целью заменить компьютерное зрение. Оба метода имеют свои преимущества и недостатки. Но здесь мы показали, что уже можем идентифицировать некоторые из этих свойств даже без камеры», — объясняет Чен.
Расширение областей применения и перспективы развития
Исследователи из Массачусетского технологического института также хотят изучить возможности применения этой технологии в более сложных роботизированных системах, таких как мягкие роботы, и с более сложными объектами, включая плещущиеся жидкости или гранулированные среды, например, песок. В долгосрочной перспективе они надеются использовать эту технику для улучшения обучения роботов, что позволит будущим роботам быстро развивать новые навыки манипулирования и адаптироваться к изменениям в окружающей среде.
В ближайшие годы Amazon планирует дальнейшее развитие и масштабное внедрение технологии Vulcan. Интеграция Vulcan с существующим парком из 750 000 мобильных роботов компании предполагает создание комплексной концепции автоматизации, которая может коренным образом изменить логистическую отрасль.
Тактильное обучение: когда датчики наделяют роботов чувством осязания
Разработка роботов с тактильными ощущениями, примером которых являются робот Amazon Vulcan и система распознавания объектов Массачусетского технологического института, знаменует собой решающий поворотный момент в робототехнике. Эти технологии позволяют роботам выполнять задачи, которые ранее были исключительной прерогативой человека, поскольку они требуют тонкой моторики и тактильного восприятия.
Различные подходы – акцент Amazon на специализированных датчиках и концепция MIT по использованию существующих датчиков для тактильной обратной связи – демонстрируют многообразие направлений исследований в этой области. Оба подхода имеют свои сильные стороны и области применения.
Благодаря все большей интеграции тактильных возможностей в роботизированные системы открываются новые возможности для автоматизации сложных задач в логистике, производстве, здравоохранении и многих других областях. Способность роботов не только видеть, но и «чувствовать» окружающую среду значительно приближает нас к будущему, в котором роботы и люди смогут сотрудничать еще более тесно и интуитивно.
В связи с этим: