
В настоящее время это крупнейшее исследование в области человекоподобной робототехники, проводимое компанией Xpert.Digital – впереди бум на рынке: от прототипов роботов до практического применения
Предварительная версия Xpert

Available in 27 languages 📢
Предпочитаю Xper.Digital в GoogleⓘОпубликовано: 13 мая 2025 г. / Обновлено: 13 мая 2025 г. – Автор: Konrad Wolfenstein

В настоящее время это крупнейшее исследование в области человекоподобной робототехники, проводимое компанией Xpert.Digital – впереди бум на рынке: от прототипов роботов до практического применения – Изображение: Xpert.Digital
Гуманоидная робототехника: ключ к новой промышленной революции? (Время чтения: 52 мин / Без рекламы / Без платного доступа)
Для руководителей: Преодоление несоответствия – почему интегрированные стратегии являются ведущей в развитии робототехники
Гуманоидная робототехника находится на переломном этапе, переходя от исследовательских прототипов к первоначальным коммерческим внедрениям, особенно в промышленных условиях. Это стремительное развитие во многом обусловлено достижениями в области искусственного интеллекта (ИИ), особенно воплощенного ИИ, больших языковых моделей (LLM) и моделей «зрение-язык-действие» (VLA), а также инновациями в аппаратном обеспечении. Прогнозы рынка указывают на существенный рост, оценивая его объем от 30 до более чем 200 миллиардов долларов к 2035 году. Области применения разнообразны, от промышленности и здравоохранения до систем персональной помощи. Несмотря на огромный потенциал, остаются значительные проблемы в таких областях, как аккумуляторные технологии, ловкость рук, экономическая эффективность, масштабируемость и этическое управление. Совпадение стоимости аппаратного обеспечения, улучшение ИИ и растущая нехватка рабочей силы создают своего рода «идеальный шторм», способствующий ускоренному внедрению гуманоидных роботов. Это может привести к более быстрой окупаемости инвестиций (ROI) в целевых промышленных приложениях, чем прогнозируют некоторые консервативные оценки, что, в свою очередь, приведет к более быстрым циклам внедрения в этих нишах. У компаний будет все больше стимулов для внедрения решений по автоматизации, а человекоподобные роботы, благодаря своей универсальности, предлагают адаптируемое решение для человекоориентированных сред.
Двойной акцент на разработке универсального ИИ и узкоспециализированных аппаратных компонентов (исполнительных механизмов, датчиков) приводит к сложному взаимодействию. Прогресс в одной области может быть затруднен узкими местами в другой, что говорит о том, что целостные, интегрированные стратегии развития будут иметь решающее значение для лидеров рынка. Например, сложный ИИ не может в полной мере компенсировать недостаточную механическую ловкость или ограниченное время работы из-за нехватки батарей. И наоборот, передовое оборудование не может полностью раскрыть свой потенциал без достаточно интеллектуального программного обеспечения. Компании, которые могут разрабатывать аппаратное обеспечение и ИИ вместе, как это делает Tesla, используя подход вертикальной интеграции, могут, следовательно, получить конкурентное преимущество.
Это десятилетие (2025-2035 годы) обещает стать началом эпохи преобразований для человекоподобных роботов, способных коренным образом изменить работу, общество и повседневную жизнь.
Подходит для:

Технологические прорывы: как человекоподобные роботы меняют нашу жизнь
Гуманоидная робототехника стала одной из самых динамичных и потенциально преобразующих технологических областей XXI века. На стыке искусственного интеллекта, передовой механики, электроники и материаловедения человекоподобные роботы обещают коренным образом изменить то, как люди работают, взаимодействуют и живут. В данном исследовании представлен всесторонний анализ текущего состояния, исторического развития, технологических основ, разнообразных областей применения, рыночной ситуации, ключевых проблем и перспектив развития человекоподобных роботов, с особым акцентом на период до 2025 года и далее.
Определение человекоподобного робота
Гуманоидный робот — это, по определению, робот, внешняя форма которого напоминает человеческое тело и обычно имеет туловище, голову, две руки и две ноги. Эта человекоподобная форма является не просто эстетической особенностью, но часто служит функциональным целям, таким как взаимодействие с инструментами и средой, разработанными для людей, или экспериментальным целям, например, исследованию двуногого передвижения.
В академических определениях речь идет не только о физическом сходстве, но и о том, что человекоподобные роботы тщательно проектируются, чтобы имитировать не только внешний вид человека, но и его поведение. Это включает в себя воспроизведение таких функций, как восприятие, принятие решений и взаимодействие. Благодаря своей антропоморфной конструкции они обладают существенными преимуществами в человекоцентричных средах, обеспечивая более естественное взаимодействие и большую адаптивность, чем другие виды роботов. Способность передвигаться в созданных человеком пространствах и использовать инструменты, разработанные для людей, является ключевым аспектом их функциональности и растущей полезности.
Само определение «гуманоида» постоянно меняется. Первоначально основное внимание уделялось физической форме. Однако в последнее время академические исследования и технологические достижения все больше смещают акцент на имитацию поведения и когнитивных функций. Это развитие в значительной степени обусловлено достижениями в области искусственного интеллекта. Хотя человекоподобные роботы не только выглядят как люди, но и все чаще «действуют» и «рассуждают» подобно человеку, это снижает барьеры для взаимодействия, но одновременно поднимает более глубокие этические вопросы, касающиеся обмана, эмоциональной привязанности и природы интеллекта.
Значение и масштаб исследования
Гуманоидная робототехника представляет собой важнейший технологический рубеж и воплощает в себе конвергенцию различных научных и технических дисциплин. Ее потенциал для революционизации отраслей, решения проблемы нехватки рабочей силы, помощи в выполнении опасных задач и улучшения повседневной жизни огромен. «Функциональное назначение» гуманоидной конструкции — взаимодействие с человеческими инструментами и окружающей средой — становится основным экономическим фактором. Эта адаптивность означает, что компании могут интегрировать гуманоидных роботов в существующие рабочие процессы с меньшими сбоями и капитальными затратами, чем потребовалось бы для перепроектирования заводов или складов под специализированных роботов. Это неотъемлемое преимущество является мощным аргументом в пользу внедрения, как показали пилотные программы в автомобильной и логистической отраслях, и служит сильным катализатором для внедрения.
Цель данного исследования — предоставить всесторонний анализ текущего состояния (примерно к 2025 году), исторического контекста, технологических основ, областей применения, рыночной ситуации, проблем и будущих путей развития человекоподобной робототехники. Оно призвано служить надежным источником информации для исследователей, разработчиков, политиков, инвесторов и широкой общественности, помогая им понять сложность и далеко идущие последствия этой новой технологии.
Историческое развитие человекоподобной робототехники
Увлечение искусственными существами, похожими на людей, уходит корнями в далекое прошлое и оказало значительное влияние на развитие человекоподобной робототехники. От древних мифов до современных высокотехнологичных машин, стремление человечества воспроизвести интеллект и движения в человекоподобной форме охватывает широкий спектр направлений.
Ранние концепции и автоматы
Идея человекоподобных искусственных существ встречается в древних мифах, таких как мифы о Гефесте, создавшем механических слуг, или о Пигмалионе, чья статуя ожила. Ранние механические конструкции, известные как автоматы, свидетельствуют об этом раннем интересе. Примерами могут служить египетские водяные часы с движущимися человеческими фигурками, отбивавшими часы, механические птицы и лошади китайского инженера, царя Шу Цзе (ок. 400 г. до н.э.), и программируемые музыкальные автоматы Аль-Джазари XII века. Эскизы Леонардо да Винчи механического рыцаря конца XV века, способного двигать руками, головой и челюстью, также относятся к этой серии ранних концепций. Эти ранние примеры демонстрируют давнее увлечение человека созданием искусственных существ и заложили концептуальную основу для последующих разработок.
Исторические вехи в развитии робототехники (до 1970 года и важные теоретические/ранние практические шаги в XX веке)

Исторические вехи в развитии робототехники (до 1970 года и важные теоретические/ранние практические шаги в XX веке) – Изображение: Xpert.Digital
Историческое развитие робототехники до 1970 года характеризуется многочисленными вехами и теоретическими прорывами. Еще в 3500 году до н.э. в греческой мифологии мифы о Гефесте и Пигмалионе описывали ранние концепции разумных механизмов и искусственных существ. Около 1500 года до н.э. египтяне разработали водяные часы с человекоподобными фигурами, что стало первым шагом к механической автоматизации. В 1206 году н.э. Исмаил аль-Джазари сконструировал раннюю форму программируемого человекоподобного робота — «Лодку музыканта». В 1495 году н.э. Леонардо да Винчи набросал механического рыцаря, способного сидеть и двигать головой и руками. В 1769 году Вольфганг фон Кемпелен разработал «Механического турка» — человекоподобного автомата, который мог играть в шахматы, хотя им управлял скрытый человек.
В 1920/1921 годах Карел Чапек в своей пьесе «RUR» ввёл термин «робот», вдохновлённый чешским словом «robota», которое переводится как «принудительный труд». На Всемирной выставке 1939 года компания Westinghouse Electric представила робота «Электро», который умел говорить и отвечать на команды. В 1940-х годах Джордж Девол разработал промышленного робота «Унимат», который произвёл революцию в промышленном производстве, автоматизировав повторяющиеся задачи. В 1942 году Исаак Азимов сформулировал в своих научно-фантастических рассказах известные «Три закона робототехники», предоставив этические принципы взаимодействия с роботами.
В 1948 году Норберт Винер опубликовал свою новаторскую работу «Кибернетика», посвященную управлению и коммуникации в машинах и живых существах, что оказало значительное влияние на развитие робототехники. В том же году Уильям Грей Уолтер создал автономных роботов «Элмер» и «Элси», способных реагировать на изменения окружающей среды. Наконец, в 1950 году Алан Тьюринг представил тест Тьюринга — концепцию, предназначенную для оценки способности машины демонстрировать интеллектуальное поведение, неотличимое от человеческого.
XX век: Заря современной робототехники
XX век ознаменовал начало современной робототехники, характеризующейся теоретическими основами и первыми практическими применениями. Термин «робот» был придуман в 1920/1921 годах Карелом Чапеком в его пьесе «RUR (Универсальный робот Россума)», происходящей от чешского слова «robota», означающего принудительный труд. Более ранним известным человекоподобным роботом был «Электро», представленный компанией Westinghouse на Всемирной выставке в Нью-Йорке в 1939 году, способный реагировать на голосовые команды и произносить простые предложения. Исаак Азимов внес значительный вклад в этическую дискуссию своими «Тремя законами робототехники» (1942) и популяризировал термин «робототехника» как науку о роботах. Одновременно такие пионеры, как Норберт Винер со своей работой по кибернетике (1948) и Уильям Грей Уолтер со своими первыми автономными роботами (1948), заложили важные теоретические и практические основы. Публикация Алана Тьюринга «Тест Тьюринга» (1950) заложила концептуальную основу для оценки машинного интеллекта. Хотя робот не был человекоподобным, разработка первого промышленного робота, Unimate, Джорджем Деволом в 1940-1960-х годах стала решающим шагом в развитии технологий автоматизации и произвела революцию в промышленном производстве. Этот период характеризовался интенсивными литературными и научными дебатами о социальных, этических и технологических проблемах робототехники.
Ключевые этапы после 1970 года: появление функциональных человекоподобных роботов
После 1970 года началась эра функциональных человекоподобных роботов, способных выполнять всё более сложные задачи.
- WABOT-1 (1972-1973, Университет Васэда): Этот робот считается первым в мире полностью функциональным интеллектуальным человекоподобным роботом. Разработанный с целью создания «персонального робота», WABOT-1 мог ходить, общаться с человеком на японском языке, измерять расстояния и направления до объектов с помощью искусственных глаз и ушей, а также брать и переносить предметы руками.
- WABOT-2 (1984, Университет Васэда): Разработанный как «специальный робот», WABOT-2 представлял собой человекоподобного музыканта, умевшего читать ноты и играть на электронном органе.
- Honda E-Series (1986-1993) и P-Series (1993-1997): Honda стала пионером в области двуногого передвижения. Серия E использовалась для фундаментальных исследований, в то время как серия P привела к созданию более совершенных прототипов. P2 (1996) стал первым саморегулирующимся двуногим роботом, а P3 (1997) — первым полностью независимым двуногим человекоподобным роботом, способным ходить без внешних тросов.
- ASIMO (2000, Honda): Будучи одиннадцатым двуногим человекоподобным роботом Honda, ASIMO был способен бегать, взаимодействовать и выполнять полуавтономные задачи. Улучшенная версия была представлена в 2011 году. ASIMO был включен в Зал славы робототехники в 2004 году. Разработка была прекращена в 2018 году, а ASIMO был официально снят с эксплуатации в 2022 году. Прекращение таких проектов, как ASIMO, не обязательно означает провал, а часто свидетельствует о стратегической переориентации на более практичные или экономически целесообразные приложения. Это отражает зрелость рынка, где инвестиции в исследования и разработки должны все больше соответствовать конкретным потребностям рынка и прибыльности.
- Серия HRP (Япония, AIST/Kawada): Проект гуманоидной робототехники (HRP) начался с модифицированных роботов Honda P3 и получил дальнейшее развитие. HRP-2 (2002) — двуногий шагающий робот. HRP-4C «Miim» (2009) — робот, разработанный женщиной, который умел петь и танцевать.
- Actroid (2003, Университет Осаки/Кокоро): Этот робот отличался реалистичной силиконовой кожей и был ориентирован на человекоподобный внешний вид.
- HUBO (2005, KAIST): Первый в Южной Корее шагающий человекоподобный робот.
- Nao (2006, Aldebaran Robotics/SoftBank): небольшой программируемый человекоподобный робот с открытым исходным кодом, получивший широкое применение в исследованиях и обучении.
- Atlas (2013 – настоящее время, Boston Dynamics): Первоначально разработанный для конкурса DARPA Robotics Challenge, Atlas представляет собой высокодинамичный человекоподобный робот, способный выполнять сложные движения, такие как ходьба, бег, прыжки и сальто назад. Полностью электрическая версия с улучшенной маневренностью была представлена в апреле 2024 года. Конкурс DARPA Robotics Challenge послужил ключевым катализатором, расширив границы возможностей человекоподобных роботов в условиях стихийных бедствий и способствуя инновациям, которые сейчас находят применение в коммерческих продуктах. Передовая мобильность и прочность, разработанные для этих конкурсов, теперь являются отличительными чертами коммерческих или почти серийных роботов.
- Valkyrie (2013, NASA): Также разработанная для конкурса DARPA Robotics Challenge, Valkyrie предназначена для использования в поврежденных, созданных человеком средах и имеет потенциал для космических миссий.
- Последние значимые события (после 2020 года):
- Ameca (Engineered Arts, 2022): Известна своим чрезвычайно выразительным внешним видом.
- Оптимус (Tesla, 2022): Универсальный человекоподобный робот, разработанный для использования в производстве и, возможно, в быту.
- Unitree G1 (2024): Относительно недорогой человекоподобный робот.
- Рисунок 01/02 (Рисунок AI): Гуманоидные роботы общего назначения, уже проходящие испытания в рамках пилотных промышленных проектов.
Исторические данные свидетельствуют о явном сдвиге от фундаментальных исследований, проводимых университетами (например, Васэда, ранние работы Honda), к коммерчески ориентированным разработкам с конкретными целями применения (например, Tesla Optimus для производства, Agility Digit для логистики). Это указывает на растущую зрелость данной области и ее растущую экономическую жизнеспособность.
Основные технологии и компоненты
Возможности человекоподобных роботов основаны на сложном взаимодействии различных ключевых технологий и компонентов. Они варьируются от механических систем, обеспечивающих движение и структуру, до передовых датчиков для восприятия окружающей среды, а также сложных программных и ИИ-архитектур, позволяющих осуществлять управление, обучение и взаимодействие. Развитие в каждой из этих областей имеет решающее значение для прогресса человекоподобной робототехники в целом.
Механические системы
Механические системы составляют физическую основу человекоподобных роботов и включают в себя приводы для движения, материалы для конструкции и энергетические системы для работы.
Исполнительные механизмы
Исполнительные механизмы — это двигатели, отвечающие за движение внутри робота, имитирующие работу человеческих мышц и суставов. Идеальные исполнительные механизмы должны обладать высокой удельной мощностью, малой массой и малыми габаритами.
- Электрические приводы: это наиболее распространенный тип, и обычно они меньше по размеру. Однако для суставов человеческого размера может потребоваться несколько электрических приводов на один сустав для создания достаточной силы (например, HRP-2). Достижения в области постоянных магнитов (например, неодим-железо-бор) значительно увеличили удельную мощность электродвигателей, сократив разрыв с гидравлическими системами. Электрические приводы характеризуются высокой эффективностью (75–80%), меньшим количеством компонентов и меньшими требованиями к техническому обслуживанию по сравнению с гидравлическими системами. Тенденция к использованию электрических приводов, даже в высокодинамичных роботах, таких как новый Atlas, свидетельствует о зрелости рынка, ориентированного на коммерческую целесообразность (эффективность, техническое обслуживание, стоимость), а не на максимальную производительность. Это ускорит их внедрение в промышленные и, возможно, потребительские приложения.
- Гидравлические приводы: Они обеспечивают более высокую мощность и лучший контроль крутящего момента, но могут быть очень громоздкими (например, оригинальный Atlas). Электрогидравлические приводы (ЭГП) предлагают решение этой проблемы, связанной с размерами. Гидравлические системы обладают высокой ударопрочностью, но имеют более низкую эффективность (40-55%) и требуют большего технического обслуживания.
- Пневматические приводы: они работают на основе сжимаемости газов; хорошо известным примером является мышца Маккиббена.
Например, компания Kawasaki разрабатывает «гидросервоприводную мышцу» — электрогидравлический актуатор, предназначенный для обеспечения высокой ударопрочности и удельной мощности для своего человекоподобного робота Kaleido. Решение Boston Dynamics сделать новый Atlas полностью электрическим свидетельствует о тенденции к коммерциализации и расширению области применения.
Сравнительный анализ технологий приводов для человекоподобных роботов
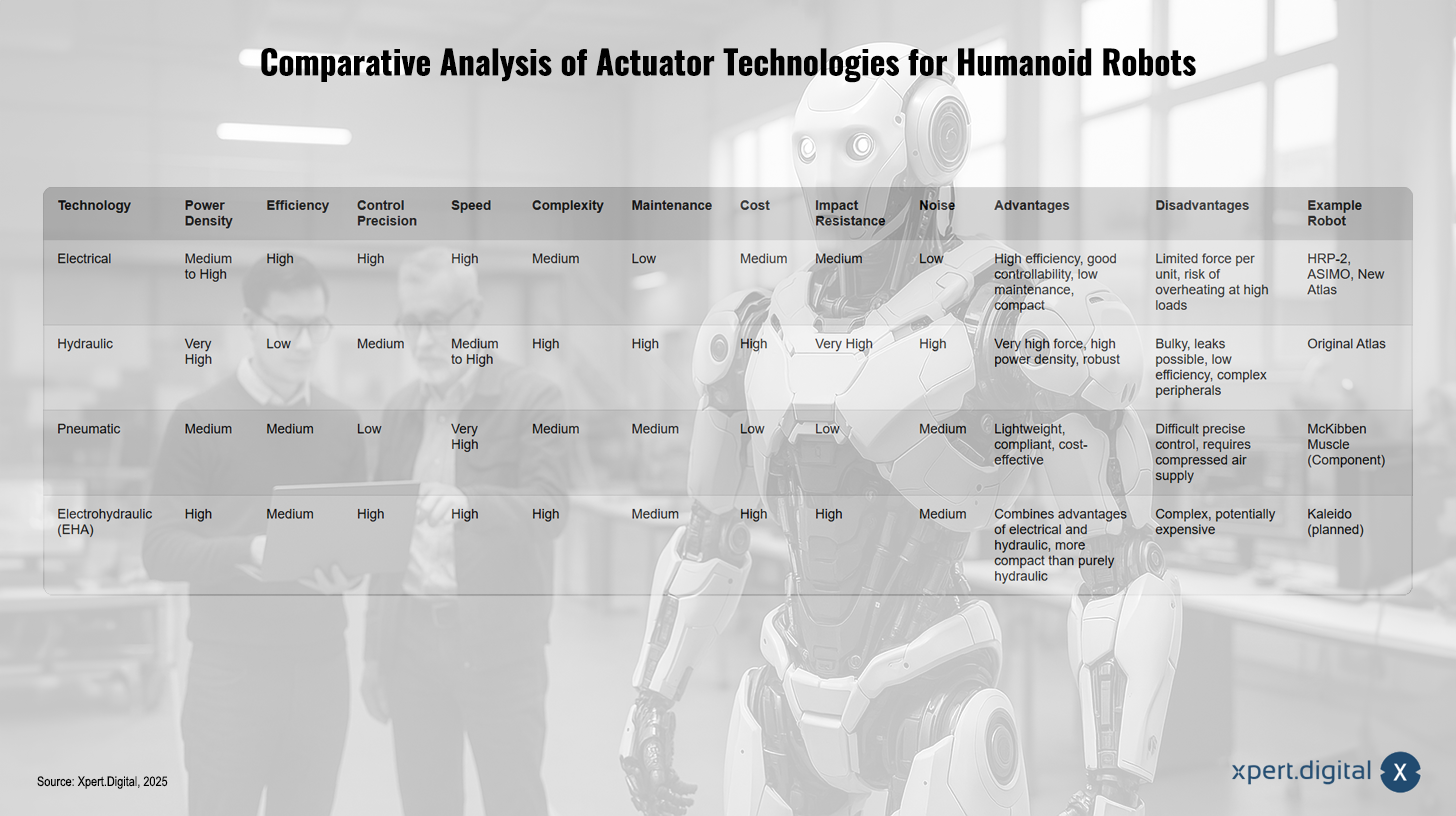
Сравнительный анализ технологий приводов для человекоподобных роботов – Изображение: Xpert.Digital
Сравнительный анализ технологий приводов для человекоподобных роботов показывает, что электрические приводы обладают высокой эффективностью, хорошей управляемостью, низкими требованиями к техническому обслуживанию и компактностью, но ограничены по максимальной силе и подвержены перегреву — примерами являются HRP-2, ASIMO и новый Atlas. Гидравлические приводы обеспечивают очень большую силу, высокую удельную мощность и надежность, но громоздки, неэффективны, склонны к утечкам и требуют сложной периферийной аппаратуры, как показал пример оригинального Atlas. Пневматические приводы привлекательны благодаря своей легкости, гибкости и экономичности, но их сложно точно контролировать и они требуют подачи сжатого воздуха; примером является мышца Маккиббена. Электрогидравлические приводы (ЭГП) сочетают в себе преимущества электрических и гидравлических приводов, более компактны, чем чисто гидравлические системы, но сложны и потенциально дороги, как в случае с планируемым Kaleido.
Материалы и конструктивное проектирование
Облегченные конструкции имеют решающее значение для гибкости, энергоэффективности и увеличения срока службы батарей человекоподобных роботов. Желательны высокое соотношение нагрузки к весу и высокая жесткость конструкции. Методы эволюционной структурной оптимизации (ESO) используются для значительного снижения веса каркасных конструкций (на 50,15% в одном исследовании) без ущерба для жесткости или вибрационных характеристик. В качестве материалов используются магниевые сплавы и полимерные смолы, как в ASIMO.
Энергетические системы (аккумуляторы)
Одной из самых больших проблем является электропитание. Широко используются литий-ионные (Li-ion) и литий-железо-фосфатные (LiFePO₄) батареи. Например, Tesla Optimus использует систему емкостью 2,3 кВт⋅ч и напряжением 52 В, а Unitree H1 — батарею емкостью 15 А·ч (0,864 кВт⋅ч). Батарея Valkyrie имеет емкость 1,8 кВт⋅ч и обеспечивает время работы около часа.
Ключевые проблемы заключаются в ограниченной плотности энергии, что приводит к короткому времени работы; высокой выходной мощности, необходимой для динамических процессов; низкой скорости зарядки (в промышленных приложениях часто требуется около 20 часов работы, тогда как в настоящее время это скорее 4-6 часов); и безопасности батарей в экстремальных условиях окружающей среды. Ожидается прогресс в полутвердотельных и твердотельных батареях, которые обещают более высокую плотность энергии (например, Xinwangda с 500 Вт·ч/кг, Farasis Energy с >330 Вт·ч/кг, REPT с >400 Вт·ч/кг). Технологии быстрой зарядки также имеют решающее значение.
Подходит для:

Сенсорные и системы восприятия
Гуманоидные роботы должны точно воспринимать окружающую среду, чтобы безопасно и эффективно взаимодействовать с ней. Восприятие играет фундаментальную роль в обеспечении беспрепятственного взаимодействия с людьми и окружающей средой. Полагаться исключительно на зрительные системы недостаточно для сложных манипуляций и безопасного взаимодействия в загроможденных или скрытых помещениях. Поэтому проприоцепция и тактильное восприятие становятся следующими важными направлениями в сенсорных технологиях для гуманоидных роботов. Ограничения зрительного восприятия в таких задачах, как захват скрытых объектов или приложение точных усилий, стимулируют значительные исследования и разработки в этих других сенсорных модальностях. Успехи в этих областях откроют новый уровень возможностей манипулирования.
Визуальные системы
Для мониторинга окружающей среды, обнаружения объектов и навигации используются камеры (RGB, камеры глубины), лидар, радар и ультразвуковые датчики. Tesla Optimus в значительной степени полагается на камеры (многокамерная система, аналогичная той, что используется в его транспортных средствах), в то время как Boston Dynamics Atlas использует лидар, датчики глубины и RGB-датчики. Valkyrie использует систему Carnegie Robotics Multisense SL (лазер, стерео, ИК-структурированный свет), а также дополнительные камеры для обнаружения опасностей.
Слуховые системы
Микрофоны используются для распознавания речи и записи окружающего шума.
Тактильные датчики
Это имеет решающее значение для манипулирования объектами, распознавания их свойств (форма, жесткость, мягкость) и безопасного взаимодействия. Включает в себя датчики силы, давления, крутящего момента, скольжения и температуры. Человеческая рука имеет приблизительно 17 000 тактильных рецепторов; воспроизведение этого количества представляет собой огромную проблему. Достижения включают в себя гибкие электронные оболочки (e-кожи) и передовые алгоритмы искусственного интеллекта. Такие компании, как Sanctuary AI (робот Phoenix), Meta AI (Digit 360 с технологией GelSight) и Университет Дьюка (SonicSense, использующий акустику), добиваются успехов в этой области. Тактильные датчики позволяют осуществлять захват вслепую, обнаруживать скольжение и избегать чрезмерного усилия, что особенно важно, поскольку многие современные роботизированные захваты по-прежнему представляют собой простые двухпальцевые системы или системы с присосками.
Проприоцепция
Это ощущение положения и движения собственного тела без визуальных или слуховых стимулов, и оно имеет решающее значение для надежного управления, особенно в мягких роботах. Даже для биологических систем это представляет собой проблему; современным роботам часто не хватает такой богатой обратной связи. Например, платформа KineSoft использует массивы датчиков деформации для оценки формы в мягких роботизированных руках.
Объединение данных с датчиков и оценка состояния
Объединение данных с нескольких датчиков (многосенсорное слияние) с использованием таких методов, как байесовские фильтры и методы оптимизации (максимум апостериорной вероятности, MAP), имеет решающее значение для надежной оценки внутреннего состояния и понимания внешней среды. В этом контексте машинное обучение все чаще предпочтительнее систем, основанных на правилах.
Архитектуры программного обеспечения, искусственного интеллекта и управления
Интеллект и поведение человекоподобных роботов определяются сложным программным обеспечением, передовыми моделями ИИ и сложными архитектурами управления. Разработка отдельных компонентов (исполнительных механизмов, датчиков, батарей) все больше определяется требованиями ИИ и систем управления на основе машинного обучения. Это создает замкнутый цикл обратной связи, в котором развитие ИИ требует более совершенного оборудования, а улучшенное оборудование позволяет создавать более сложные системы ИИ. Модели ИИ для сложных задач, таких как манипулирование всем телом или маневренное передвижение, требуют высокочувствительных исполнительных механизмов, плотной сенсорной обратной связи (особенно тактильной) и достаточной мощности. Подходы, основанные на машинном обучении, например, выигрывают от оборудования, разработанного для совместимости с машинным обучением (например, простой сбор данных, надежные датчики). Эта коэволюция необходима для преодоления существующих плато в производительности.
Передвижение и динамическое равновесие
Поддержание динамического равновесия основано на таких концепциях, как точка нулевого момента (ZMP). Модельно-предиктивное управление (MPC) и управление всем телом (WBC) являются популярными подходами для интеграции сложных моделей и генерации податливых движений. Выбор параметров остается сложной задачей, поскольку ручная настройка очень трудоемка. Методы, такие как DiffTune, используют дифференцируемое программирование для автоматической настройки. Методы обучения (например, обучение с подкреплением) применяются для двуногого передвижения и восстановления после падений.
Манипулирование и ловкость
Управление всем телом координирует множество степеней свободы для выполнения сложных задач. Воспроизведение тонкой моторики человека является важной областью исследований. Манипуляция всем телом, то есть использование любой части тела для взаимодействия, представляет собой серьезную проблему. Робот RoboPanoptes, например, использует зрение всего тела (21 камера) для обеспечения ловкости всего тела. Обучение на основе демонстраций человека (имитационное обучение) является ключевым подходом.
Навигация и взаимодействие с окружающей средой
Планирование траектории, предотвращение столкновений и обнаружение собственных столкновений имеют решающее значение для передвижения в сложных условиях. SLAM (одновременная локализация и картографирование) в сочетании с обучением с подкреплением (RL) используется для навигации мобильных роботов с целью повышения сходимости и уменьшения количества столкновений.
Взаимодействие человека и робота (ВРИ) и когнитивные способности
Языковые модели (LLM) и модели визуального языка (VLM) улучшают логическое мышление и понимание контекста у роботов, обеспечивая более естественное, диалого-ориентированное взаимодействие. Роботам наделяют «личностью» и любознательным поведением. К проблемам относятся неоднозначность языка, которая может приводить к ошибкам, и сложность сопоставления языка с физическими действиями. Тонкая настройка LLM на основе данных роботов (модели визуального языка и действий – VLA) является многообещающим подходом.
Парадигмы обучения и модели ИИ
Происходит переход от систем, основанных на правилах, к машинному обучению (МО) и глубокому обучению (ГО). Обучение с подкреплением (ПО) используется для развития двигательных навыков, как и имитационное обучение на основе демонстраций человека. Перенос навыков из симуляции в реальный мир имеет решающее значение для эффективного обучения; платформа ToddlerBot, например, была разработана с учетом совместимости с МО и сбора данных. Конечная цель — искусственный общий интеллект (ИОИ), который позволит роботам учиться, рассуждать и адаптироваться к широкому спектру задач, подобно людям, без предварительного программирования. «Черный ящик» некоторых передовых моделей ИИ, особенно в глубоком обучении, представляет собой проблему для критически важных приложений и отладки. Это требует новых подходов к объяснимости и верификации в системах управления человекоподобными роботами. Хотя ИИ открывает беспрецедентные возможности, сложность понимания того, как модели глубокого обучения принимают решения, является проблемой, особенно для роботов, которые тесно взаимодействуют с людьми или работают в опасных условиях. Отсутствие интерпретируемости может препятствовать сертификации безопасности и исправлению ошибок, а также стимулировать исследования в направлении более прозрачного ИИ или более надежных методов проверки.
🎯🎯🎯 Воспользуйтесь преимуществами обширного пятистороннего опыта Xpert.Digital в комплексном пакете услуг | BD, R&D, XR, PR и оптимизация цифровой видимости

Воспользуйтесь преимуществами обширного пятистороннего опыта Xpert.Digital в комплексном пакете услуг | НИОКР, XR, PR и оптимизация цифровой видимости — Изображение: Xpert.Digital
Xpert.Digital обладает глубокими знаниями различных отраслей. Это позволяет нам разрабатывать индивидуальные стратегии, которые точно соответствуют требованиям и задачам вашего конкретного сегмента рынка. Постоянно анализируя тенденции рынка и следя за развитием отрасли, мы можем действовать дальновидно и предлагать инновационные решения. Благодаря сочетанию опыта и знаний мы создаем добавленную стоимость и даем нашим клиентам решающее конкурентное преимущество.
Подробнее об этом здесь:
Коммерциализация и потенциал: рыночный прорыв человекоподобных роботов
Применение человекоподобных роботов (по отраслям, с акцентом на 2025 год)
Гуманоидные роботы все чаще находят применение в самых разных отраслях, поскольку их человекоподобная форма и растущие возможности делают их идеальными для задач, традиционно выполняемых людьми. К 2025 году ожидается значительный прогресс в тестировании и первоначальном внедрении, особенно в промышленных секторах, здравоохранении и нишевых приложениях. Человекоподобная форма — это палка о двух концах: хотя она облегчает интеграцию в человеческую среду и взаимодействие человека и робота (HRI), она также предъявляет высокие требования к ловкости и интеллекту, которые в настоящее время трудно выполнить. Это может привести к разочарованию, если возможности не оправдают антропоморфных обещаний. Человеческая рука обладает невероятной ловкостью, а человеческий интеллект отличается высокой адаптивностью. Современные роботы, несмотря на улучшения, по-прежнему испытывают трудности с точной манипуляцией и надежной работой в неструктурированной среде. Этот разрыв между внешним видом и реальной производительностью может негативно повлиять на принятие и воспринимаемые преимущества, если его не контролировать должным образом.
Подходит для:

Промышленная автоматизация (производство и логистика)
В сфере промышленной автоматизации человекоподобные роботы обещают оптимизировать сборочные линии, работы по техническому обслуживанию и контролю, а также логистические процессы.
Производство: человекоподобные роботы помогают работникам в выполнении точных задач, подъеме тяжелых грузов и монотонной работе.
- Пример из практики: BMW и Figure AI: Роботы Figure 02 используются на заводе BMW в Спартанбурге, Южная Каролина, для таких задач, как сборка шасси и транспортировка деталей. После первоначальных пилотных проектов в 2024 году, постоянное внедрение началось в начале 2025 года. Функциональные усовершенствования к ноябрю 2024 года привели к увеличению скорости перемещения на 400%, что позволило роботам устанавливать до 1000 компонентов в день. Figure AI планирует произвести от 100 000 до 200 000 единиц в течение следующих четырех лет (2025-2028).
- Пример из практики: Mercedes-Benz и Apptronik: робот Apollo помогает рабочим в производственном цехе.
- Tesla планирует использовать роботов Optimus для таких задач, как погрузка листового металла на своих заводах, и ожидается, что к 2025 году несколько тысяч таких роботов будут выполнять значимые задачи. BYD стремится к 2025 году развернуть 1500 человекоподобных роботов, а к 2026 году увеличить их количество до 20 000.
Логистика и складирование: человекоподобные роботы оптимизируют обработку материалов, управление запасами, а также процессы комплектации, упаковки и сортировки.
- Пример из практики: Amazon и Agility Robotics: Amazon тестирует робота Digit для обработки и переработки контейнеров в своих научно-исследовательских центрах и на складах. Робот Digit рассчитан на 8-часовые смены. Amazon также тестирует робота Apollo от компании Apptronik.
- Гуманоиды могут сократить трудозатраты человека при приемке и разгрузке товаров, хранении, комплектации заказов, упаковке, маркировке, отгрузке и погрузке, а также при управлении запасами.
- В начале 2025 года IDTechEx зафиксировала лишь ограниченное количество пилотных проектов (<100 человекоподобных роботов) на складах. Масштабное внедрение (тысячи единиц) не ожидается до конца 2025 года из-за 18-30-месячных циклов тестирования. Прорыв в логистике ожидается в 2026-2027 годах.
Наиболее успешные на сегодняшний день приложения, такие как Moxi в больничной логистике и Digit в обработке контейнеров на складах, сосредоточены на конкретных, повторяющихся задачах в относительно структурированной среде, а не на общей автономности. Это указывает на путь к более широкому внедрению: начать со специализированных задач, а затем обобщить их по мере развития технологии. Moxi осуществляет доставку, Digit перемещает контейнеры. Это четко определенные задачи. Такой подход контрастирует с концепцией универсальных роботов. Успех человекоподобных роботов, предназначенных для выполнения конкретных задач, обеспечивает окупаемость инвестиций и генерирует данные для улучшения общих возможностей, создавая позитивный цикл. Такой поэтапный подход более практичен, чем попытка с самого начала внедрить полноценные универсальные возможности.
Здравоохранение и уход за пожилыми людьми
В этом секторе человекоподобные роботы оказывают поддержку медицинскому персоналу, обеспечивают уход за пациентами, оказывают социальную поддержку и участвуют в реабилитационных мероприятиях.
Логистика в больницах: робот Moxi от Diligent Robotics используется более чем в 24 медицинских учреждениях и выполнил почти миллион доставок (лабораторных образцов, расходных материалов), значительно экономя время и расстояния, которые раньше приходилось преодолевать пешком. Окупаемость инвестиций очевидна: повышается эффективность и снижается уровень профессионального выгорания персонала. Модель «Робототехника как услуга» (RaaS) вероятно станет ключевым фактором внедрения в малых и средних предприятиях (МСП) и развертывания человекоподобных роботов в секторах, где высокие первоначальные инвестиции являются непреодолимым препятствием, тем самым демократизируя доступ к передовой робототехнике. Высокие затраты на приобретение являются серьезным барьером. Модель RaaS снижает барьер для входа, перекладывая затраты с капитальных вложений (Capex) на операционные расходы (Opex). Успех Moxi с этой моделью в здравоохранении демонстрирует ее прибыльность. По мере того, как человекоподобные роботы становятся более функциональными, RaaS может позволить небольшим компаниям или отделам использовать их без масштабных первоначальных инвестиций, потенциально ускоряя проникновение на рынок.
Уход за пожилыми людьми, общение и помощь: роботы, такие как Grace (Hanson Robotics), Pepper (SoftBank), Nadine, PARO, ElliQ, Temi и Toyota HSR, обеспечивают социальное взаимодействие, напоминания о приеме лекарств, мониторинг состояния здоровья и поддержку в повседневной жизни. Исследования демонстрируют позитивное вовлечение и эмоциональную поддержку.
Реабилитация: Гуманоидные роботы, такие как Бакстер и НАО, используются в качестве помощников в терапии для пациентов, перенесших инсульт, и детей, направляя их выполнение упражнений и поддерживая вовлеченность пациентов в процесс.
Хирургическая помощь: Хирургическая система Da Vinci обеспечивает поддержку во время малоинвазивных операций.
Исследование космоса и опасные среды
Космические исследования: поддержка астронавтов, проведение внекорабельной деятельности (ВКД), подготовка жилых модулей и техническое обслуживание МКС или будущих лунных/марсианских баз. Примеры включают робота NASA Robonaut 2 (первый человекоподобный робот в космосе), Valkyrie (разработанный для марсианских миссий) и роботов DLR Rollin' Justin, Agile Justin и TORO. Автономная работа имеет решающее значение из-за задержек связи. Модульная конструкция для возможности ремонта также важна (например, Valkyrie).
Опасные среды (ликвидация последствий стихийных бедствий, ядерная отрасль): навигация по опасной местности, поисково-спасательные операции, доставка гуманитарной помощи, обращение с токсичными материалами, поддержка тушения пожаров. Примеры: робот Atlas от Boston Dynamics (разработан для таких задач), робот Spot на АЭС Фукусима-Дайичи для разведки, измерения радиации и отбора проб обломков. На Фукусиме роботы используются для мониторинга, дезактивации и подготовки к удалению топливных отходов.
Персональная помощь и бытовые приложения
Гуманоидные роботы предназначены для выполнения домашних обязанностей (уборка, приготовление пищи, стирка), обеспечения безопасности и в будущем могут служить компаньонами. Эта область все еще находится на очень ранней стадии развития. Робот NEO Gamma от 1X Technologies был протестирован в домашних условиях для выполнения таких задач, как приготовление кофе и помощь в приготовлении пищи (с дистанционным управлением). Среди проблем — неструктурированная домашняя обстановка, безопасность, стоимость и необходимый общий интеллект.
Образование, развлечения и обслуживание клиентов
Образование: Интерактивные помощники преподавателей, персонализированное обучение, особенно по естественнонаучным и техническим дисциплинам, а также для учащихся с особыми потребностями. Робот Nao от SoftBank Robotics широко используется (более 13 000 единиц в более чем 70 странах) и применяется для обучения программированию, культурному наследию, математическим понятиям, а также для поддержки детей с аутизмом. Исследования показывают, что Nao повышает вовлеченность, но может иметь проблемы с удобством использования в шумной обстановке.
Развлечения: интерактивные ведущие, артисты в тематических парках, на мероприятиях и в СМИ. Ameca от Engineered Arts известна своей реалистичной мимикой. RoboThespian используется для театральных представлений. Ожидается значительный рост рынка гуманоидных роботов для развлечений.
Обслуживание клиентов и сфера гостеприимства: администраторы, информационные помощники, консьержи в розничной торговле, отелях и банках. Робот Pepper от SoftBank прошел тестирование в качестве робота-администратора в больницах и розничных магазинах.
Новые и нишевые приложения
Другие области применения включают военную и оборонную промышленность (разведка, обезвреживание боеприпасов, имитационные тренировки), а также сельское хозяйство и строительство.
Основные области применения и пригодность человекоподобных роботов (по состоянию на 2025 год)
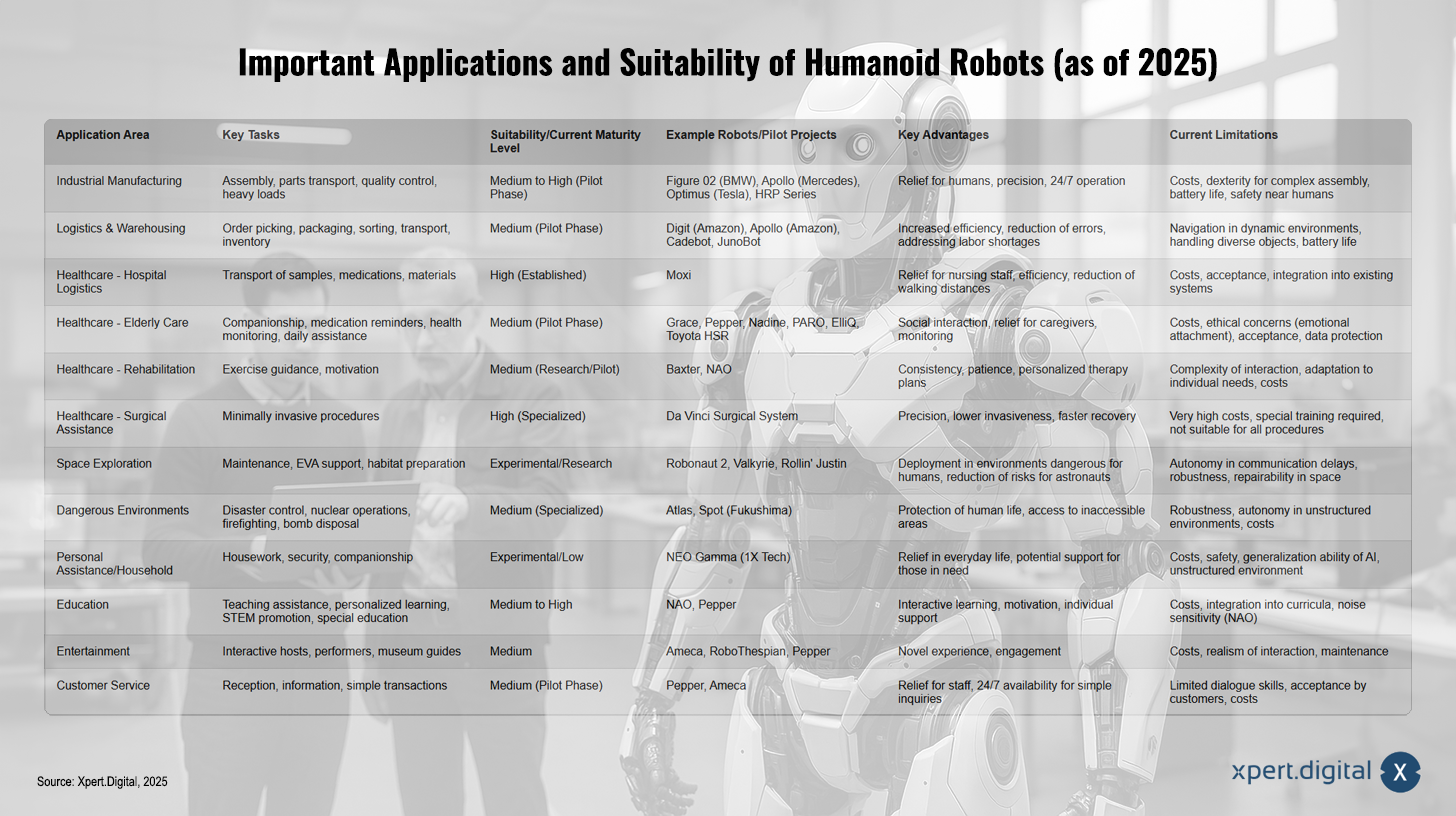
Основные области применения и пригодность человекоподобных роботов (по состоянию на 2025 год) – Xpert.Digital
Ключевые области применения и пригодность человекоподобных роботов в 2025 году охватывают множество сфер. В промышленном производстве роботы берут на себя такие задачи, как сборка, транспортировка деталей, контроль качества и перемещение тяжелых грузов. Благодаря таким проектам, как Figure 02 (BMW), Apollo (Mercedes), Optimus (Tesla) и серия HRP, они достигли среднего и высокого уровня зрелости, но все еще ограничены стоимостью, временем автономной работы и безопасностью при работе в непосредственной близости от людей. В логистике и складском хозяйстве человекоподобные роботы используются для комплектации заказов, сортировки и транспортировки. Примеры, такие как Digit и Apollo от Amazon, или Cadebot и JunoBot, демонстрируют многообещающие пилотные проекты, хотя остаются проблемы, такие как динамическая среда и работа с разнообразными объектами. В здравоохранении роботы в основном используются в больничной логистике, где такие модели, как Moxi, созданы для разгрузки медперсонала путем транспортировки образцов и лекарств. В уходе за пожилыми людьми человекоподобные роботы, такие как Grace и Pepper, помогают в повседневной жизни, но этические проблемы и вопросы конфиденциальности данных остаются препятствиями. В реабилитации, например, в виде мотивационных упражнений, роботы типа Baxter и NAO оказывают поддержку; однако для совершенствования взаимодействия необходимы дальнейшие исследования. Пионер в области хирургической помощи — это хирургическая система da Vinci, которая позволяет проводить малоинвазивные процедуры с высокой точностью, но подходит только для определенных задач и очень дорога.
В освоении космоса роботы, такие как Robonaut 2, Valkyrie и Rollin' Justin, используются для технического обслуживания и подготовки жилых модулей в опасных условиях, минимизируя риски для астронавтов. Однако остаются проблемы, касающиеся автономности, надежности и ремонтопригодности. В опасных условиях, таких как ликвидация последствий стихийных бедствий или ядерные сценарии, роботы, такие как Atlas и Spot, предоставляют необходимые услуги. Персональная помощь и ведение домашнего хозяйства остаются экспериментальными задачами с прототипами, такими как NEO Gamma, где стоимость, безопасность и гибкость в неструктурированных средах по-прежнему представляют собой препятствия. В образовании роботы, такие как NAO и Pepper, способствуют интерактивному обучению и персонализированной поддержке, в то время как стоимость и интеграция в учебную программу остаются проблемами. Системы, такие как Ameca и RoboThespian, также присутствуют в индустрии развлечений, предлагая новые возможности в качестве музейных гидов или артистов. В сфере обслуживания клиентов они предоставляют поддержку на ресепшене и информацию, предлагая преимущество круглосуточной доступности; однако ограниченные возможности диалога и приемлемость остаются проблемами. В целом, человекоподобные роботы демонстрируют огромный потенциал, но в настоящее время все еще сталкиваются с технологическими, финансовыми и социальными препятствиями для полной реализации своего потенциала.
Рыночная ситуация и коммерциализация (по состоянию на 2025 год)
Рынок человекоподобных роботов в 2025 году находится в динамичной фазе перехода от исследований и разработок к началу коммерческого использования. Все больше компаний, от устоявшихся технологических корпораций до гибких стартапов, стимулируют инновации и борются за долю рынка в этом перспективном секторе.
Ведущие компании и платформы для человекоподобных роботов
К числу наиболее видных игроков, движущих разработку и коммерциализацию человекоподобных роботов, относятся (примерно по состоянию на 2025 год):
- Tesla: С помощью Optimus Gen 2 компания Tesla планирует использовать его в собственном производстве, а также, возможно, для решения общих задач по оказанию помощи.
- Boston Dynamics: Электрический Atlas известен своей исключительной мобильностью и находится в стадии дальнейшей разработки для исследовательских целей, промышленной инспекции и оказания помощи при стихийных бедствиях.
- Figure AI: С моделями Figure 01, Figure 02 и анонсированной Figure 03 компания фокусируется на роботах общего назначения для промышленности и логистики, реализуя пилотные проекты, в том числе, в BMW.
- Компания Agility Robotics разработала робота Digit, специально предназначенного для логистических задач, и проводит его тестирование такими компаниями, как Amazon.
- Компания Apptronik: Apollo разрабатывается для промышленного применения и логистики, в партнерстве с ней участвуют такие компании, как Mercedes-Benz и Amazon.
- Компания Unitree Robotics предлагает более гибкие и экономичные решения для исследовательских, образовательных и легких промышленных задач, включая такие модели, как G1 и H1.
- Sanctuary AI: Робот Phoenix стремится к развитию когнитивных способностей и человекоподобного поведения для решения сложных задач в различных отраслях.
- 1X Technologies: NEO разработан для использования дома и для выполнения вспомогательных задач.
- PAL Robotics: Известный европейский производитель, предлагающий широкий ассортимент роботов (REEM, TIAGo, TALOS, ARI) для исследовательских, медицинских и сервисных применений.
- Honda: Хотя проект ASIMO был прекращен, наследие компании и ее фундаментальные исследования по-прежнему имеют важное значение для отрасли.
- Компания Engineered Arts: Ameca известна своими невероятно реалистичными выражениями лиц и интерактивными возможностями, в первую очередь для социального взаимодействия и обслуживания клиентов.
- UBTech Robotics: с такими моделями, как Walker X, для различных применений.
- NEURA Robotics: Робот 4NE-1 разработан для взаимодействия человека и робота в бытовых и промышленных условиях.
- DEEP Robotics: Dr01 — это надежный человекоподобный робот, предназначенный для выполнения высокоточных промышленных задач.
- Фурье-анализ: модель GR-1 используется в различных контекстах.
Наиболее перспективные платформы человекоподобных роботов (примерно к 2025 году)
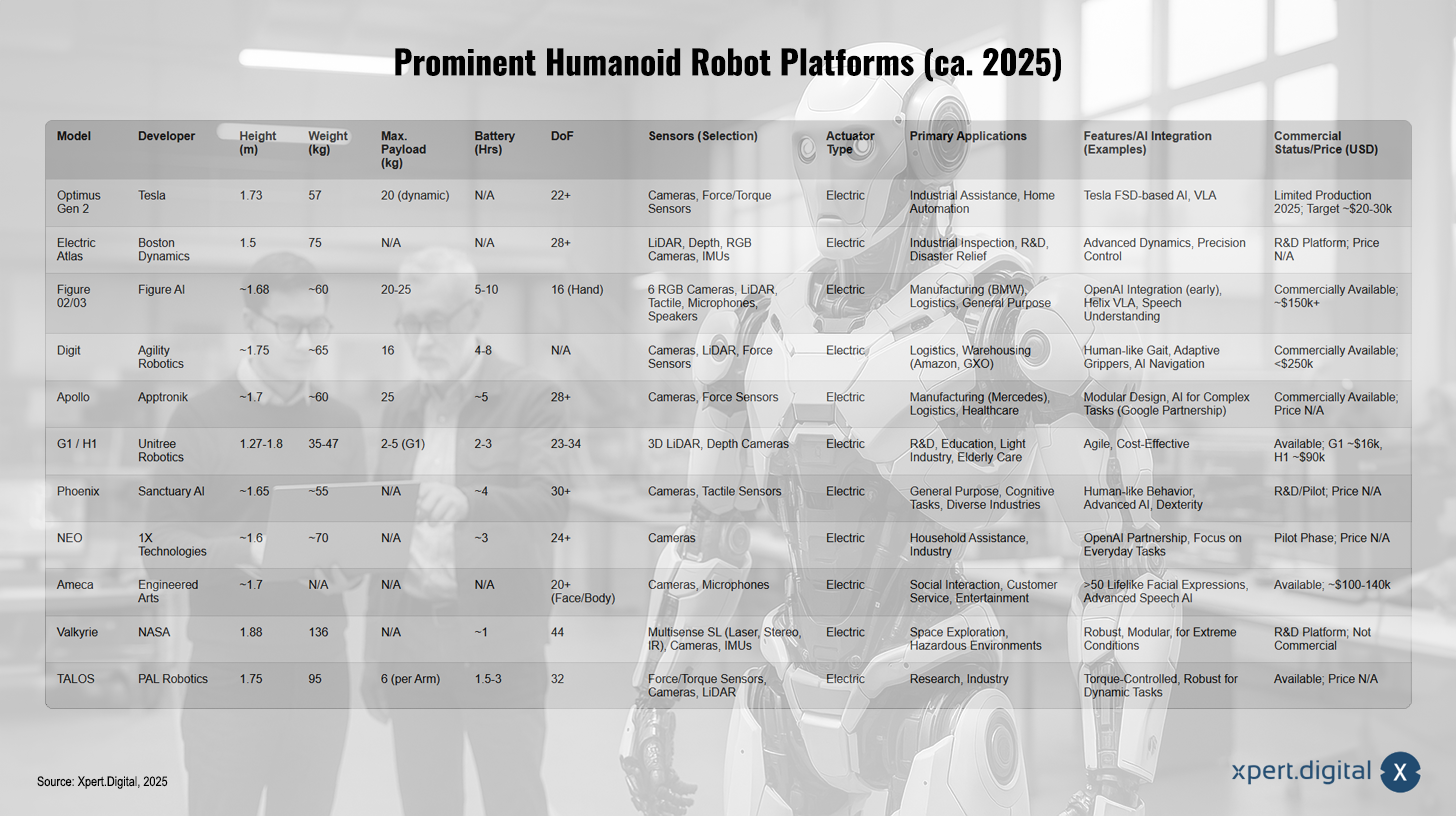
Основные платформы человекоподобных роботов (примерно 2025 год) – Изображение: Xpert.Digital
Примечание: Данные являются приблизительными или основаны на имеющейся информации (по состоянию на 1/2 квартал 2025 года). «н/д» = данные недоступны. DoF = степени свободы.
В 2025 году на рынке появятся выдающиеся человекоподобные роботы, представляющие собой впечатляющие модели, подходящие для промышленного, бытового и научного применения. Tesla Optimus Gen 2, высотой 1,73 м и с динамической грузоподъемностью до 20 кг, оснащен искусственным интеллектом на базе Tesla FSD. Планируется, что в 2025 году он будет выпущен ограниченным тиражом по цене от 20 000 до 30 000 долларов. Boston Dynamics лидирует с моделью Electric Atlas, отличающейся улучшенной динамикой и точным управлением, разработанной для промышленных инспекций и ликвидации последствий стихийных бедствий. Figure AI предлагает модель Figure 02/03, предназначенную для производства, логистики и общего назначения, использующую интеграцию с OpenAI и передовые технологии распознавания естественного языка, по цене более 150 000 долларов.
Робот Digit от Agility Robotics, цена которого составляет менее 250 000 долларов, отличается человекоподобной походкой и адаптивными захватами, что делает его идеальным для логистики и складского хозяйства. Робот Apollo от Apptronik, имеющий модульную конструкцию и разработанный для выполнения сложных задач с использованием ИИ, уже применяется в производстве и здравоохранении. Более доступные альтернативы, такие как Unitree Robotics G1, цена которого составляет около 16 000 долларов, предлагают маневренность и эффективность для легкой промышленности и образовательных учреждений. Робот Phoenix от Sanctuary AI выделяется своим человекоподобным поведением и передовым ИИ, а робот NEO от 1X Technologies отлично подходит для помощи по дому и выполнения повседневных задач. Оба робота все еще находятся на стадии пилотных испытаний.
Для социального взаимодействия и развлечений компания Engineered Arts предлагает робота Ameca с более чем 50 реалистичными выражениями лица, стоимость которого начинается от 100 000 долларов. NASA предлагает Valkyrie, робота, разработанного для экстремальных условий и исследования космоса, а TALOS от PAL Robotics, благодаря своей прочной конструкции с регулируемым крутящим моментом, идеально подходит для исследований и промышленности. Эти роботизированные платформы демонстрируют значительные достижения в области технологий, интеграции ИИ и гибкости, при этом каждая платформа адаптирована к конкретным требованиям и, таким образом, охватывает широкий спектр применений.
Тенденции в сфере инвестиций и финансирования
Сектор человекоподобной робототехники привлекает значительные венчурные инвестиции, при этом финансирование все чаще концентрируется в меньшем, но более крупном объеме. Примерами являются Figure AI, получившая 675 миллионов долларов в феврале 2024 года от таких инвесторов, как Nvidia, Джефф Безос, OpenAI и Microsoft; Physical Intelligence, привлекшая 400 миллионов долларов; и Apptronik, получившая 350 миллионов долларов (при поддержке Google). OpenAI также инвестировала 23,5 миллиона долларов в 1X Technologies. Глобальные инвестиции в стартапы, занимающиеся человекоподобной робототехникой, выросли с примерно 308 миллионов долларов в 2020 году до 1,1 миллиарда долларов в 2024 году. Инвесторов особенно привлекают гибкие, универсальные роботы с продвинутым искусственным интеллектом и их применение в быстрорастущих областях, таких как медицинская робототехника. Параллельно национальные инициативы, особенно в Китае («Сделано в Китае 2025», «14-й пятилетний план»), активно продвигают индустрию робототехники за счет государственной поддержки и развития прочных внутренних цепочек поставок.
Размер рынка, прогнозы роста и сегментация
Прогнозы роста рынка человекоподобных роботов неизменно оптимистичны, хотя точные цифры варьируются в зависимости от анализа. В целом, ожидается, что в 2024 году начнутся разработки передовых прототипов, в 2025 году – начало серийного производства, а в 2026 году – более широкое коммерческое признание. Этот широкий диапазон рыночных прогнозов отражает не только различия в методологиях, но и фундаментальную неопределенность в отношении скорости преодоления технологических препятствий (см. раздел 6) и достижения широкого общественного признания (см. раздел 7). Более оптимистичные прогнозы часто предполагают быстрые прорывы в области ИИ и снижение затрат. Окончательный размер рынка будет в значительной степени зависеть от развития этих факторов.
Краткий обзор прогнозов роста рынка человекоподобной робототехники
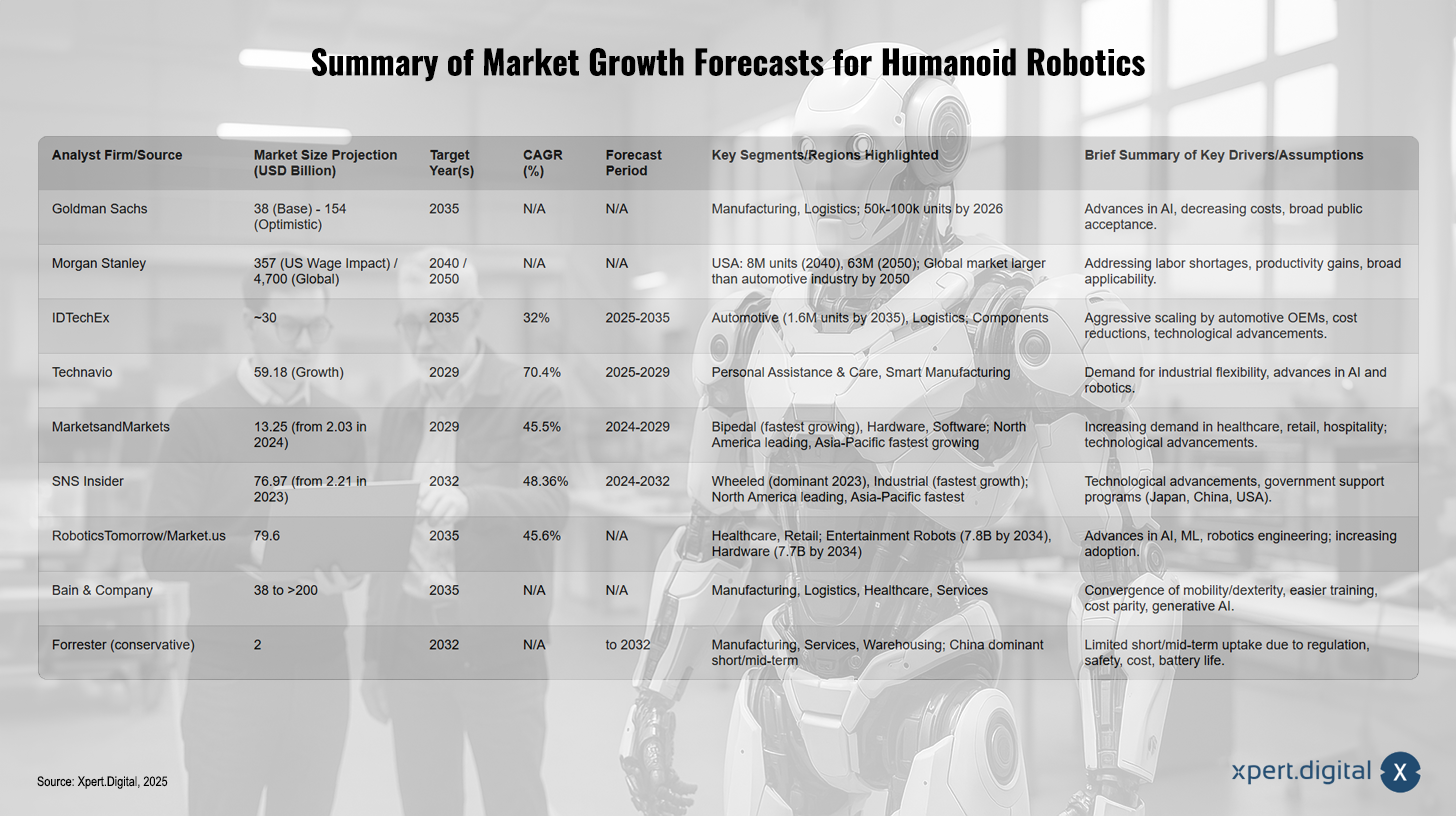
Краткий обзор прогнозов роста рынка человекоподобной робототехники – Xpert.Digital
Сегментация рынка:
- По компонентам: аппаратное обеспечение (датчики, исполнительные механизмы, источники энергии, системы управления) и программное обеспечение (на основе ИИ).
- В зависимости от мобильности: двуногие (преобладающие, адаптируемые для логистики, здравоохранения, образования) и колесные (устойчивые, более низкие затраты, для ровных поверхностей). Рынок двуногих роботов растет быстрее всего (среднегодовой темп роста 54,47% в 2023-2028 годах).
- По областям применения: промышленность (автомобильная, ведущая логистическая), персональная помощь и уход (значительный рост), исследования, образование, развлечения, поисково-спасательные службы, связи с общественностью, военная сфера.
- По регионам: в настоящее время лидирует Северная Америка, но ожидается, что Азиатско-Тихоокеанский регион (особенно Китай) продемонстрирует самый быстрый рост и потенциальное доминирование благодаря сильным цепочкам поставок и государственной поддержке. В Европе ожидается более медленное внедрение из-за трудового законодательства и профсоюзов. Геополитический аспект (лидерство США в области ИИ против доминирования Китая в цепочках поставок) может привести к региональным различиям в технологических стандартах, приоритетах применения и развитии рынка, потенциально создавая различные экосистемы человекоподобных роботов. США преуспевают в области ИИ и высокотехнологичной робототехники. Китай обладает сильной производственной базой и быстро разрабатывает собственные человекоподобные роботы, часто ориентируясь на разные основные рынки. Это может привести к расхождению путей развития: американские фирмы сосредоточатся на передовых возможностях, основанных на ИИ, а китайские фирмы будут использовать эффект масштаба в производстве и преимущества в стоимости. Торговая политика и проблемы национальной безопасности могут еще больше усугубить эти различия.
Прогнозы роста рынка человекоподобной робототехники показывают динамичное развитие, при этом различные аналитики высказывают разные мнения. Goldman Sachs оценивает рынок в диапазоне от 38 до 154 миллиардов долларов к 2035 году, называя ключевыми факторами достижения в области искусственного интеллекта (ИИ), снижение затрат и широкое общественное признание. Morgan Stanley прогнозирует, что к 2050 году мировой рынок превзойдет автомобильную промышленность, достигнув до 63 миллионов единиц по всему миру и оказав значительное влияние на заработную плату в США. IDTechEx ожидает ежегодного роста на 32% в период с 2025 по 2035 год, обусловленного технологическими достижениями и снижением затрат в автомобильном и логистическом секторах. Technavio прогнозирует объем рынка в 59,18 миллиардов долларов к 2029 году, определяя персональную помощь, уход за больными и интеллектуальное производство как ключевые сегменты роста благодаря достижениям в области ИИ и робототехники. MarketsandMarkets прогнозирует ежегодный рост на 45,5% до 2029 года, в первую очередь в Северной Америке и Азиатско-Тихоокеанском регионе, с растущим спросом в здравоохранении, розничной торговле и гостиничном бизнесе. SNS Insider подчеркивает важность государственных программ стимулирования и прогнозирует рост до 76,97 млрд долларов к 2032 году, при этом Северная Америка будет лидировать, а Азиатско-Тихоокеанский регион продемонстрирует самый быстрый рост. RoboticsTomorrow/Market.us ожидает объем в 79,6 млрд долларов к 2035 году, ускоренный достижениями в области искусственного интеллекта, машинного обучения и робототехники, с особыми перспективами в индустрии развлечений и аппаратного обеспечения. Bain & Company прогнозирует рынок от 38 млрд до более чем 200 млрд долларов к 2035 году и видит потенциал в таких областях, как производство, здравоохранение и генеративный искусственный интеллект. В отличие от этого, Forrester остается более консервативным, ожидая всего 2 млрд долларов к 2032 году из-за таких проблем, как регулирование, безопасность и эффективность батарей. В целом, рост обусловлен достижениями в области технологий, искусственного интеллекта и растущим спросом на автоматизацию, производительность и эффективность.
Бизнес-модели (например, RaaS)
Модель «Робототехника как услуга» (RaaS) набирает популярность. Она позволяет компаниям арендовать роботов вместо крупных первоначальных инвестиций, делая человекоподобных роботов доступными для малых и средних предприятий (МСП). Модели прямых продаж и лизинга преобразят промышленный ландшафт. Появление RaaS — это не просто модель финансирования, а стратегический фактор, который может значительно ускорить внедрение робототехники в МСП и развивающихся секторах за счет снижения барьеров для входа и, таким образом, расширения рыночной базы за пределы крупных корпораций. Высокие затраты на приобретение являются серьезным препятствием. RaaS преобразует инвестиционные затраты в операционные, делая передовую робототехнику более доступной. Это особенно актуально для МСП, которые не могут позволить себе крупные инвестиции. Если человекоподобные роботы смогут эффективно использоваться через RaaS, это может привести к гораздо более быстрому проникновению на рынок, чем если бы продажи осуществлялись исключительно на основе капитальных товаров, и потенциально превзойти некоторые консервативные прогнозы внедрения.
Динамика конкуренции и позиционирование на рынке
Конкуренция разворачивается между вертикально интегрированными разработчиками (например, Tesla, которая разрабатывает оборудование и ИИ собственными силами) и компаниями, которые полагаются на партнерские отношения (например, Figure AI первоначально с OpenAI, Apptronik с Google). США лидируют в обучении ИИ и высокотехнологичных приложениях, в то время как Китай доминирует в цепочках поставок, первоначально больше ориентируясь на развлечения и образование, но быстро догоняя в промышленном секторе. Согласно циклу ажиотажа Gartner, человекоподобные роботы вступили в фазу «инновационного триггера» в 2024 году, хотя их широкое внедрение может произойти еще не раньше чем через 10 лет. Forrester включил человекоподобных роботов в десятку ведущих новых технологий 2025 года и прогнозирует их разрушительное воздействие к 2030 году.
Наша рекомендация: 🌍 Безграничный охват 🔗 Сеть 🌐 Многоязычность 💪 Сильные продажи: 💡 Аутентичность и стратегия 🚀 Встреча инноваций 🧠 Интуиция

От местного к глобальному: МСП завоевывают глобальный рынок с помощью умных стратегий - Изображение: Xpert.Digital
В то время, когда цифровое присутствие компании определяет ее успех, задача состоит в том, как сделать это присутствие аутентичным, индивидуальным и масштабным. Xpert.Digital предлагает инновационное решение, которое позиционирует себя как связующее звено между отраслевым центром, блогом и представителем бренда. Он сочетает в себе преимущества каналов коммуникации и продаж на одной платформе и позволяет публиковать материалы на 18 разных языках. Сотрудничество с партнерскими порталами и возможность публикации статей в Новостях Google, а также список рассылки прессы, насчитывающий около 8000 журналистов и читателей, максимизируют охват и видимость контента. Это представляет собой важный фактор во внешних продажах и маркетинге (SMarketing).
Подробнее об этом здесь:
Следующая глава в робототехнике: трансформация человека в машину
Ключевые проблемы в человекоподобной робототехнике и ее будущее
Несмотря на стремительный прогресс и огромный потенциал, человекоподобная робототехника сталкивается с рядом серьезных технических, коммерческих и социальных проблем, которые необходимо преодолеть для обеспечения ее широкого и успешного внедрения.
Технические проблемы
Аппаратные ограничения:
- Время работы от батареи и удельная мощность: короткое время работы (часто всего 2-5 часов) и длительное время зарядки существенно ограничивают непрерывную работу. Высокая выходная мощность, необходимая для динамичных действий, является требовательной.
- Ловкость и манипуляция: Воспроизведение ловкости человеческой руки для выполнения мелких моторных задач и работы с различными предметами является серьезной проблемой. Существующие захватные устройства зачастую все еще слишком просты. Для этого необходимы передовые тактильные датчики.
- Производительность исполнительных механизмов: Достижение баланса между производительностью, скоростью, точностью, эффективностью и стоимостью исполнительных механизмов остается сложной задачей.
- Надежность и интеграция датчиков: обеспечение надежной работы датчиков в реальных условиях и эффективное объединение данных от различных типов датчиков представляют собой сложные задачи.
- Общая устойчивость и надежность: необходимо обеспечить стабильную работу роботов без частых сбоев в сложных, неструктурированных условиях.
Сложность программного обеспечения и искусственного интеллекта:
- Общий интеллект и логическое мышление: достижение человекоподобной адаптивности, навыков решения проблем и здравого смысла в разнообразных и непредсказуемых ситуациях является ключевой задачей. Современные системы ИИ все еще могут совершать «глупые ошибки». Задача «общего интеллекта» — это не просто техническая проблема ИИ, а тесно связанная с механической ловкостью и сенсорной остротой. Высокоинтеллектуальный робот с плохими физическими возможностями будет иметь ограниченное применение, и наоборот. Это требует подхода, основанного на совместном проектировании. Для того чтобы робот был действительно универсально применим, его ИИ должен уметь понимать и рассуждать в широком диапазоне задач и сред. Однако выполнение этих задач требует сложного физического взаимодействия — захвата различных объектов, навигации по сложной местности. Если ИИ может разработать план, но аппаратное обеспечение (руки, ноги, датчики) не может надежно его выполнить или точно воспринимать окружающую среду, интеллект бесполезен. Это подчеркивает необходимость тесной связи разработки ИИ и аппаратного обеспечения, а не их изолированного развития.
- Взаимодействие человека и робота (ВРИ): Создание естественного, интуитивно понятного и безопасного ВРИ, особенно для пользователей, не являющихся экспертами, — сложная задача. LLM-ы демонстрируют потенциал, но также вносят новые сложности.
- Эффективность обучения и перенос навыков из симуляции в реальный мир: разработка алгоритмов, способных эффективно осваивать сложные навыки при ограниченном объеме данных из реального мира и надежно переносить усвоенные модели поведения из симуляции на физических роботов, имеет решающее значение.
- Безопасность и предсказуемость: обеспечение безопасной работы автономных систем, особенно в непосредственной близости от людей, а также предсказуемость и проверяемость их поведения имеют первостепенное значение. «Черный ящик» некоторых моделей ИИ вызывает опасения в этом отношении.
Проблемы коммерциализации и масштабируемости
- Затраты: Высокая себестоимость единицы продукции (от 20 000 до более 150 000 долларов США в зависимости от модели и характеристик) и общие эксплуатационные расходы (включая обучение, техническое обслуживание и программное обеспечение) являются препятствием. Для некоторых низкоквалифицированных профессий приближается паритет затрат с человеческим трудом, но он еще не достигнут повсеместно. Высокая стоимость человекоподобных роботов является препятствием, но общая стоимость владения и ценностное предложение (включая такие факторы, как круглосуточная работа, безопасность при выполнении опасных задач и решение проблемы нехватки рабочей силы) в конечном итоге определят рентабельность инвестиций. Сосредоточение внимания только на цене единицы продукции недостаточно. Хотя робот за 100 000 долларов может показаться дорогим, его экономическая ценность может быть существенной, если он сможет заменить несколько смен людей, работать непрерывно, уменьшить количество ошибок и выполнять задачи, которые люди не могут или не хотят делать. Расчет рентабельности инвестиций должен быть комплексным, учитывая повышение производительности, снижение затрат на рабочую силу, повышение безопасности и увеличение операционной гибкости. Этот тонкий подход имеет решающее значение для компаний, рассматривающих возможность внедрения.
- Возврат инвестиций (ROI): Демонстрация четкого и убедительного показателя ROI для бизнеса, особенно по сравнению с существующей специализированной автоматизацией или человеческим трудом, является сложной задачей. Длительные циклы тестирования в таких отраслях, как логистика (18-30 месяцев), задерживают принятие решений.
- Производство и цепочка поставок: Масштабирование массового производства сложных человекоподобных роботов сталкивается с узкими местами, такими как ограниченная доступность высокоточных винтов. Существует зависимость от специализированных компонентов и глобальных цепочек поставок. Узкие места в производстве специализированных компонентов (например, высокоточных винтов, приводов) указывают на то, что сама цепочка поставок человекоподобных роботов может стать ключевой областью для инвестиций и инноваций. Это потенциально может привести к появлению новых производителей специализированных компонентов или вертикальной интеграции ведущими производителями роботов. Массовое производство человекоподобных роботов требует надежных поставок многих специализированных деталей. Если существующие цепочки поставок этих деталей (например, прецизионных винтов) не смогут удовлетворить растущий спрос, это ограничит общее производство человекоподобных роботов. Это создает возможности для новых компаний выйти на рынок в качестве поставщиков компонентов или для крупных игроков, таких как Tesla, для вертикальной интеграции производства компонентов с целью обеспечения поставок и контроля затрат.
- Интеграция в существующие рабочие процессы: адаптация роботов к существующим человекоориентированным средам и рабочим процессам без существенных дорогостоящих модификаций является необходимой.
- Общественное признание и доверие: Необходимо преодолеть опасения общества по поводу потери рабочих мест, безопасности, защиты данных и общего присутствия человекоподобных машин.
- Нормативно-правовые и стандартизационные препятствия: Отсутствуют четкие, глобально согласованные правила и стандарты безопасности для современных автономных человекоподобных роботов.
Ключевые технические и коммерческие проблемы в области человекоподобной робототехники
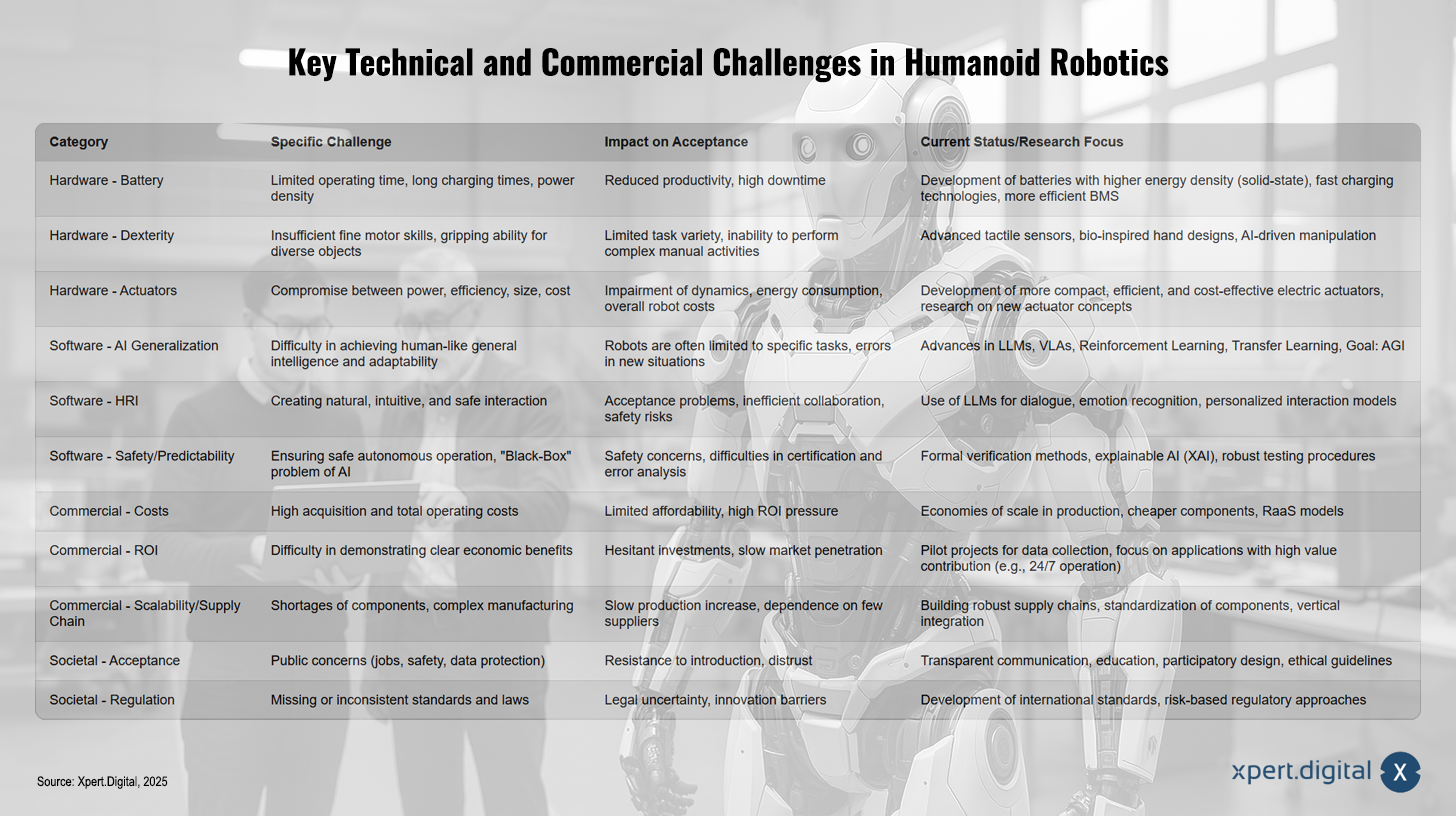
Ключевые технические и коммерческие проблемы в области человекоподобной робототехники – Изображение: Xpert.Digital
Ключевые технические и коммерческие проблемы в области человекоподобной робототехники охватывают различные категории, каждая из которых представляет собой специфические проблемы и влияет на принятие технологии. Проблемы, связанные с аппаратным обеспечением, включают ограниченный срок службы батарей и длительное время зарядки, что снижает производительность и приводит к значительным простоям. Решения включают разработку батарей с более высокой плотностью энергии и технологий быстрой зарядки. Другая проблема — недостаточная мелкая моторика и способность к захвату, что ограничивает диапазон выполняемых задач. Достижения в области тактильных датчиков и биоинспирированных конструкций рук предлагают потенциальные решения в этой области. Исполнительные механизмы также сталкиваются с проблемой баланса производительности, эффективности, размера и стоимости, что влияет на динамику и энергопотребление. В настоящее время разрабатываются новые концепции и более компактные исполнительные механизмы.
В программной части ключевой проблемой является обобщение искусственного интеллекта (ИИ), поскольку достижение человекоподобного интеллекта и адаптивности затруднительно. Отсутствие гибкости ограничивает роботов выполнением конкретных задач. Достижения в таких областях, как обучение с подкреплением и трансферное обучение, направлены на решение этих проблем. Для обеспечения естественного, интуитивно понятного и безопасного взаимодействия человека и робота (HRI) активно продвигается использование моделей ИИ, которые управляют диалогами и распознают эмоции. В то же время безопасность и предсказуемость в автономных системах являются актуальными проблемами, поскольку так называемая проблема «черного ящика» ИИ создает как проблемы безопасности, так и проблемы сертификации. В этом отношении необходимы объяснимый ИИ и надежные методы тестирования.
В коммерческом секторе высокие затраты на приобретение и сложность демонстрации четкой окупаемости инвестиций (ROI) представляют собой значительные препятствия. Эти проблемы сдерживают инвестиции и проникновение на рынок. Решениями могут быть более доступные компоненты, пилотные проекты для анализа стоимости и модели «робототехника как услуга» (RaaS). Проблемы масштабируемости и цепочки поставок, вызванные узкими местами в поставках компонентов и сложными производственными процессами, затрудняют быстрое увеличение объемов производства. В этом контексте ключевыми задачами являются надежные цепочки поставок и стандартизация компонентов.
Общественные опасения по поводу потери работы, безопасности и конфиденциальности данных влияют на общественное восприятие. Прозрачная коммуникация, просвещение и этические нормы могут помочь уменьшить предвзятость. Аналогично, отсутствие или непоследовательность регулирования представляют собой проблему, приводя к правовой неопределенности и препятствуя инновациям. Поэтому необходимы международные стандарты и основанные на оценке рисков подходы к регулированию для создания правовых рамок, которые соответствуют технологическому развитию.
Этические, социальные и управленческие последствия
Продолжающееся развитие и растущая распространенность человекоподобных роботов поднимают глубокие этические, социальные и нормативные вопросы. Они варьируются от влияния на рынок труда и безопасность до конфиденциальности данных, подотчетности и фундаментальных взаимоотношений между человеком и машиной. Этические дебаты все больше смещаются от вопроса о возможности их создания к вопросу о том, как ответственно их интегрировать. Это подразумевает растущее осознание их скорого появления и необходимость проактивного, а не реактивного управления. Предыдущие этические дискуссии часто носили спекулятивный характер. С появлением пилотных проектов и быстрым развитием ИИ вопросы становятся более практическими и актуальными. Такие источники, как [источник 1] и [источник 2], обсуждают конкретные вопросы, такие как подотчетность, предвзятость и конфиденциальность данных в контексте развертываемых систем. Этот сдвиг указывает на зрелость данной области и вовлеченность общества в краткосрочные последствия.
Основные этические проблемы
- Сокращение рабочих мест и экономические последствия: автоматизация задач, ранее выполняемых людьми, может привести к безработице или стагнации заработной платы, особенно в низкоквалифицированных секторах. Это требует программ переподготовки и систем социальной защиты.
- Безопасность и защита: Физическая безопасность людей, взаимодействующих с мощными автономными роботами, имеет первостепенное значение. Ситуация усугубляется рисками кибербезопасности и уязвимостью к атакам.
- Конфиденциальность и слежка: сбор данных роботами, оснащенными современными датчиками (камерами, микрофонами), в домах, на рабочих местах и в общественных местах вызывает серьезные опасения по поводу конфиденциальности данных. Особую обеспокоенность вызывают биометрическое отслеживание, распознавание лиц и анализ движений.
- Автономия, ответственность и подотчетность: определение ответственности в случаях, когда автономные роботы причиняют ущерб или совершают ошибки, является сложной задачей. «Черноящичный» характер принятия решений искусственным интеллектом еще больше усложняет ситуацию.
- Предвзятость: Системы искусственного интеллекта могут перенимать и сохранять предвзятость, заимствованную из обучающих данных, что может привести к несправедливому или дискриминационному обращению в таких областях, как здравоохранение или трудоустройство.
- Этика взаимодействия человека и робота (ВРИ):
- Обман и антропоморфизм: Роботы, которые выглядят как люди или проявляют эмоции, могут вводить пользователей в заблуждение или вызывать нездоровые привязанности.
- Эмоциональная зависимость: существует риск чрезмерной зависимости от роботов как от компаньонов или средств эмоциональной поддержки, особенно среди уязвимых групп населения (пожилые люди, дети).
- Замена человеческого взаимодействия: существуют опасения, что роботы могут сократить реальный человеческий контакт.
Эволюция этических норм для человекоподобных роботов, вероятно, будет отражать (и находиться под влиянием) продолжающихся дискуссий в области общей этики ИИ, но с добавлением сложности, связанной с физическим воплощением. Это физическое присутствие напрямую вызывает опасения по поводу безопасности и ответственности человека, которые отсутствуют в чисто программно-ориентированном ИИ. Многие этические принципы для ИИ (предвзятость, прозрачность, подотчетность) напрямую применимы к человекоподобным роботам. Однако физическое присутствие человекоподобного робота и его способность взаимодействовать с миром создают уникальные риски (физический вред) и динамику взаимодействия (эмоциональная привязанность). Поэтому этика человекоподобных роботов требует специализированного подхода, который основывается на общей этике ИИ, но также расширяет её.
Обзор этических и социальных проблем в человекоподобной робототехнике
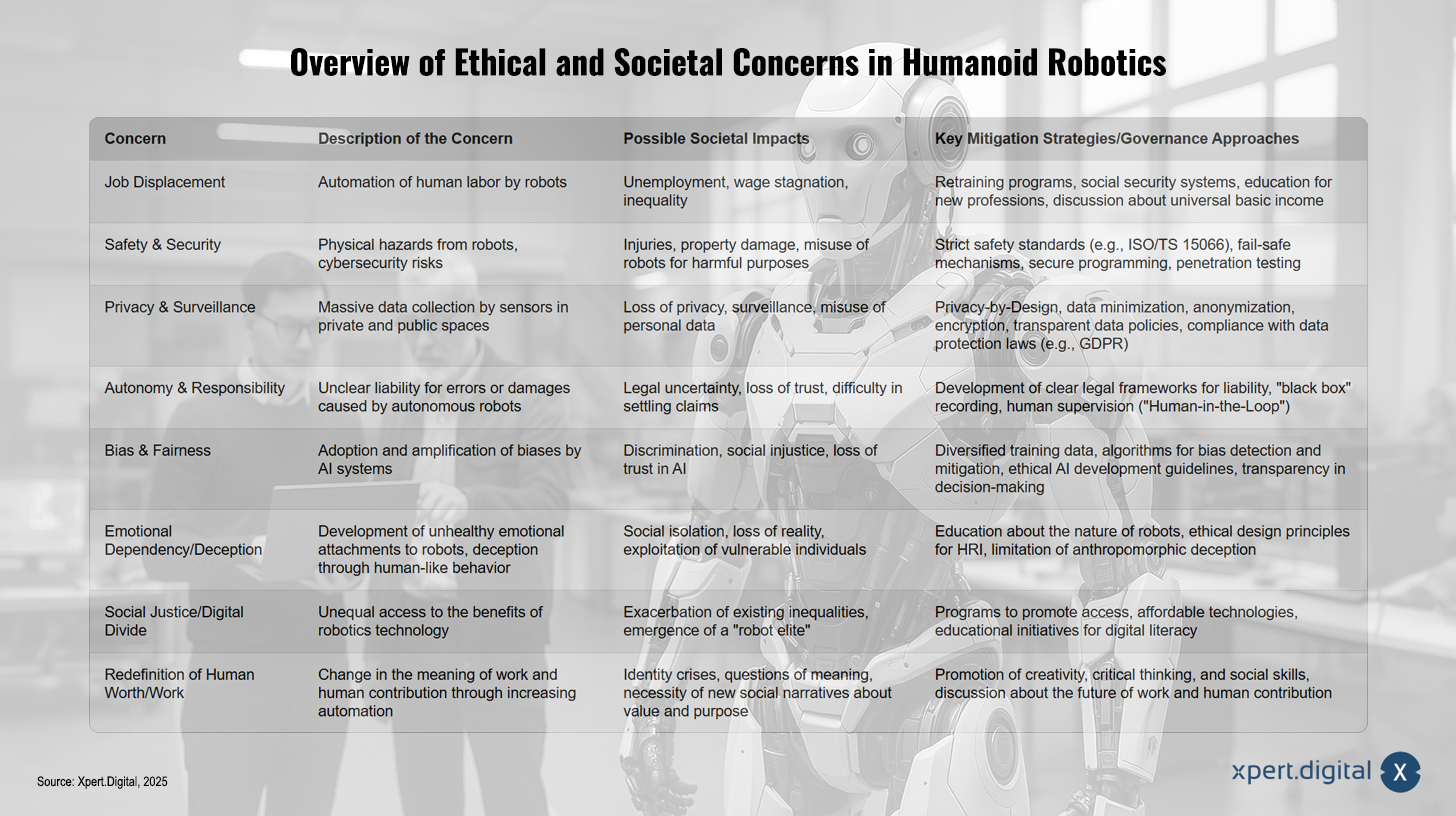
Обзор этических и социальных проблем в человекоподобной робототехнике – Изображение: Xpert.Digital
Этические и социальные проблемы, связанные с человекоподобной робототехникой, можно разделить на несколько категорий. Ключевым аспектом является потенциальное сокращение рабочих мест, которое может произойти в результате автоматизации человеческого труда роботами. Это может привести к безработице, стагнации заработной платы и росту неравенства. Предлагаемые контрмеры включают программы переподготовки, системы социальной защиты, образовательные инициативы для новых профессий и обсуждение универсального базового дохода. Другая проблема — безопасность, поскольку роботы могут представлять физическую опасность или быть использованы не по назначению из-за рисков кибербезопасности. Для предотвращения травм, повреждения имущества или вредного использования необходимы строгие стандарты безопасности, отказоустойчивые механизмы, защищенное программирование и всестороннее тестирование на проникновение.
Вопросы конфиденциальности и слежки приобретают все большее значение в связи с масштабным сбором данных роботизированными датчиками, поскольку это влечет за собой потерю конфиденциальности и риск неправомерного использования персональных данных. Меры защиты включают в себя обеспечение конфиденциальности на этапе проектирования, минимизацию данных, анонимизацию, шифрование, прозрачную политику в отношении данных и соблюдение законов о защите данных, таких как GDPR. Автономия и ответственность автономных роботов поднимают вопросы об ответственности в случае ошибок или ущерба, что может привести к правовой неопределенности, потере доверия и трудностям в урегулировании претензий. Четкие правовые рамки, записи «черного ящика» и человеческий контроль — также известный как «человек в контуре управления» — имеют важное значение.
Кроме того, существуют опасения относительно предвзятости и справедливости, поскольку системы ИИ могут перенимать и усиливать предрассудки, потенциально приводя к дискриминации и социальной несправедливости. Стратегии решения этих проблем включают в себя диверсифицированные обучающие данные, специализированные алгоритмы для обнаружения и смягчения предвзятости, этические принципы разработки ИИ и прозрачность в принятии решений. Эмоциональная зависимость или обман со стороны роботов также представляют собой проблему, особенно если они вводят людей в заблуждение, имитируя человекоподобное поведение и вызывая эмоциональную привязанность. В этом контексте крайне важно повышать осведомленность об истинной природе роботов, устанавливать этические принципы проектирования во взаимодействии человека и робота (HRI) и ограничивать стратегии антропоморфного обмана.
Дальнейшие социальные последствия касаются социальной справедливости и цифрового неравенства, поскольку неравный доступ к технологиям на основе робототехники может усугубить существующее неравенство и создать «роботизированную элиту». Образовательные инициативы, направленные на повышение цифровой грамотности, программы, поощряющие доступ к технологиям, и доступные по цене технологии являются подходящими контрмерами. Наконец, развитие автоматизации происходит в контексте переосмысления ценности человека и труда. Это может спровоцировать кризисы идентичности и вопросы смысла жизни, в то время как необходимы новые общественные представления о ценности и цели человеческой деятельности. Развитие креативности, критического мышления и социальных навыков, а также содействие открытому обсуждению будущего труда являются важными подходами к решению этих проблем.
Социальное воздействие
- Будущее работы: интеграция человекоподобных роботов приведет к трансформации должностных обязанностей, созданию новых профессий (например, обслуживание роботов, программирование ИИ, специалисты по этике) и подчеркнет необходимость непрерывного обучения. В то же время это открывает потенциал для значительного повышения производительности труда и экономического роста.
- Социальная справедливость и доступность: существует риск усугубления цифрового разрыва, если доступ к полезным роботизированным технологиям будет распределен неравномерно. В то же время роботы потенциально могут улучшить доступность для людей с ограниченными возможностями. Возникает потенциальный парадокс: хотя человекоподобные роботы разрабатываются для решения проблемы нехватки рабочей силы и выполнения нежелательных задач, их широкое внедрение может создать новые формы социальной стратификации, основанные на доступе к этим технологиям и контроле над ними. Это может углубить цифровой разрыв, если не будет обеспечено справедливое управление. Человекоподобные роботы обещают заполнить пробелы в рабочей силе, но их разработка и внедрение требуют значительных капиталовложений и экспертных знаний. Если доступ к этим инструментам повышения производительности останется ограниченным богатыми странами или крупными корпорациями, это может усугубить экономическое неравенство в глобальном масштабе и внутри общества. Преодоление цифрового разрыва становится еще более важным в эпоху передовой робототехники.
- Общественное восприятие и доверие: Формирование общественного доверия имеет решающее значение для принятия. Прозрачность в использовании данных, четкая коммуникация и решение вопросов безопасности и конфиденциальности являются важными факторами для этого. Культурные различия в ожиданиях от взаимодействия человека и робота, а также в отношении принятия роботов также играют свою роль.
- Переосмысление ценности и предназначения человека: по мере того, как роботы берут на себя все больше задач, общественные дискуссии о ценности человеческого труда, творчества и социальных отношений будут усиливаться.
Управление и регулирование
Для разработки и внедрения человекоподобных роботов необходимы надежные правовые и этические рамки. Существующие международные стандарты безопасности (например, ISO/TS 15066 для коллаборативных роботов) должны быть доработаны для более совершенных человекоподобных роботов. Крайне важны такие принципы, как прозрачность, справедливость, подотчетность, человеческий контроль и принцип непричинения вреда. Актуальны принципы защиты конфиденциальности на этапе проектирования и правила защиты данных (например, GDPR). Создание глобально гармонизированных правил представляет собой сложную задачу из-за различий в культурных ценностях и приоритетах. Закон ЕС об искусственном интеллекте служит примером регулирования, основанного на оценке рисков.
От заводского цеха до гостиной: гуманоидные роботы в меняющихся областях применения – Дорожная карта (2025-2035 годы и далее)
В ближайшие годы и десятилетия ожидается непрерывное и ускоренное развитие человекоподобной робототехники, обусловленное технологическими прорывами и растущим признанием на рынке. Однако путь к широкому внедрению не является линейным, а, вероятно, будет включать циклы ажиотажа, разочарования и, в конечном итоге, повышения производительности (аналогично циклу ажиотажа Gartner). Различные приложения будут развиваться с разной скоростью. Первые успехи в структурированных промышленных условиях будут иметь решающее значение для обеспечения финансирования и устойчивых исследований и разработок для более сложных, неструктурированных приложений. В настоящее время Gartner относит человекоподобных роботов к «триггеру инноваций», а Forrester отмечает их быстрое увеличение значимости. Исторически сложилось так, что внедрение технологий часто следует таким циклам. Первоначальное промышленное развертывание (автомобильная промышленность, логистика) обеспечит решающее подтверждение и доход. Если эти ранние приложения оправдают ожидания по рентабельности инвестиций, это подтолкнет к дальнейшим инвестициям, необходимым для решения более сложных задач в бытовых или высокоинтерактивных условиях, которые ожидаются позже.
Технологии следующего поколения
- Датчики: Ожидается непрерывный прогресс в области визуальных систем (более высокое разрешение, улучшенная обработка данных с помощью ИИ), тактильных датчиков (повышенная чувствительность, долговечность, экономичность) и проприоцепции. Ключевую роль сыграет мультимодальное слияние данных с различных датчиков.
- Приводы: Разрабатываются более энергоэффективные, компактные и быстродействующие электрические приводы. Потенциальные прорывы в области приводов для мягкой робототехники могут привести к созданию более гибких и безопасных интерфейсов «человек-робот».
- Материалы: Ведутся разработки более легких, прочных и долговечных материалов. В центре внимания также находятся самовосстанавливающиеся материалы и материалы со встроенными сенсорными функциями.
- Энергетические системы: Аккумуляторы с более высокой плотностью энергии (например, твердотельные батареи), более быстрым временем зарядки и усовершенствованными системами управления батареями (BMS) имеют решающее значение для увеличения времени работы и повышения безопасности.
- Искусственный интеллект и общий интеллект: Достижения в направлении искусственного общего интеллекта (AGI) позволят роботам осваивать более сложные задачи с меньшим объемом данных, мыслить абстрактно, глубоко понимать контекст и демонстрировать здравый смысл. Виртуальные обучающие зоны (VLA) и мультимодальные модели станут более совершенными. Долгосрочная перспектива AGI для гуманоидов потребует фундаментального переосмысления взаимоотношений человека и ИИ и потенциально приведет к новым формам сотрудничества, созависимости и даже социальным структурам, которые трудно предсказать с сегодняшней точки зрения. AGI подразумевает роботов с человекоподобным обучением и рассуждением. Когда гуманоиды достигнут этого, они станут не просто инструментами; они станут партнерами или даже автономными агентами. Это поднимает глубокие вопросы об их роли в обществе, их полномочиях по принятию решений и природе «работы» и «интеллекта». Необходимые социальные изменения будут гораздо более масштабными, чем те, которые требуются для нынешних узких применений ИИ.
Планируемые этапы и сроки внедрения
- Краткосрочная перспектива (2025-2027 гг.):
- В автомобильной и логистической отраслях растет число пилотных проектов. Tesla и BYD планируют ввести в эксплуатацию тысячи таких автомобилей в 2025-2026 годах.
- Первый коммерческий запуск для решения конкретных, четко определенных задач в этих секторах.
- Сосредоточьтесь на повышении надежности, снижении затрат и демонстрации очевидной окупаемости инвестиций в промышленных условиях.
- Ожидается, что использование человекоподобных роботов в логистике получит дальнейшее развитие в 2026-2027 годах.
- Среднесрочная перспектива (2028-2033):
- Расширение сферы применения на более сложные задачи в промышленных условиях.
- Более широкое признание в других сферах коммерческих услуг (розничная торговля, гостиничный бизнес) и в специализированных областях здравоохранения.
- Развитие моделей RaaS, повышающее доступность.
- Значительные улучшения в маневренности, времени автономной работы и возможностях искусственного интеллекта.
- Возможность ограниченного использования под наблюдением специалиста в домашних условиях/для оказания личной помощи при выполнении конкретных задач.
- Долгосрочная перспектива (2034-2040+):
- Широкое применение во многих отраслях и потенциально в частных домохозяйствах для выполнения общих задач по оказанию помощи.
- Гуманоидные роботы, способные принимать более автономные решения и работать в условиях высокой неструктурированности.
- Более тесная интеграция в человеческое общество, потенциально ведущая к значительным преобразованиям рынка труда и переосмыслению понятия труда.
- По прогнозам Morgan Stanley, к 2040 году в США будет 8 миллионов работающих человекоподобных роботов, а к 2050 году — 63 миллиона.
Трансформационный потенциал и долгосрочное видение
Гуманоидные роботы рассматриваются как универсальные инструменты, способные расширить возможности человека практически во всех секторах. Они потенциально могут решить основные социальные проблемы, такие как нехватка рабочей силы, старение населения и опасные виды труда, а также улучшить качество жизни. Многие считают, что наступил «момент iPhone» для робототехники, ведущий к массовому внедрению и новой эре сотрудничества человека и машины. Экономический потенциал огромен, с перспективой повышения производительности и роста ВВП. Долгосрочная перспектива включает в себя роботов, которые органично интегрированы в повседневную жизнь, выполняют широкий спектр задач и естественно взаимодействуют с людьми. Разработка «универсальных гуманоидов» — это стремление к «универсальному физическому интерфейсу». В случае его достижения это может превратить многие виды физического труда и специализированное роботизированное оборудование в товар, подобно тому как универсальные компьютеры превратили в товар специализированные вычислительные машины. Цель — робот, способный выполнять множество задач. Если одна гуманоидная платформа, благодаря передовому искусственному интеллекту и адаптируемому оборудованию, сможет выполнять задачи, которые в настоящее время требуют множества специализированных роботов или работников-людей, это будет представлять собой сдвиг парадигмы. Эта «универсальность» может привести к экономии за счет масштаба производства и значительно снизить потребность в различных видах специализированного автоматизированного оборудования, коренным образом трансформируя рынок робототехники и экономику труда.
Подходит для:

От научной фантастики к реальности: начинается эра человекоподобных роботов
Гуманоидная робототехника находится на решающем этапе своего развития. Благодаря значительным достижениям в области искусственного интеллекта, усовершенствованным аппаратным компонентам и растущему рыночному спросу, эти человекоподобные машины превращаются из простых объектов исследований в реальные решения для реальных проблем в промышленности, здравоохранении и других областях. Представление о роботах, беспрепятственно взаимодействующих с людьми и выполняющих задачи в созданной человеком среде, становится все ближе к реальности.
Анализ показал, что технологические основы, особенно в областях исполнительных механизмов, датчиков, источников питания и управления на основе искусственного интеллекта, быстро развиваются. В то же время сложность воспроизведения человеческой ловкости и интеллекта, высокие затраты, масштабируемость производства, а также обеспечение безопасности и надежности продолжают представлять собой серьезные проблемы. Рынок демонстрирует огромный потенциал роста, о чем свидетельствуют многочисленные прогнозы, но скорость широкого коммерческого внедрения будет зависеть от того, насколько эффективно будут преодолены эти препятствия.
Этические и социальные последствия имеют глубокий характер и требуют активного участия. Необходимо решать вопросы, связанные с потерей рабочих мест, защитой данных, ответственностью и безопасностью, а также более тонкие аспекты взаимодействия человека и робота и общественного признания. Ответственные инновации, основанные на широком сотрудничестве между промышленностью, научными кругами, правительством и общественностью, наряду с перспективным управлением, имеют решающее значение для обеспечения того, чтобы разработка и внедрение человекоподобных роботов служили общему благу.
В заключение, человекоподобные роботы обладают потенциалом для глубокой трансформации работы, общества и повседневной жизни в ближайшие десятилетия. Хотя путь от научной фантастики к повседневной реальности все еще полон трудностей, импульс прогресса неоспорим. Успешная интеграция этих технологий потребует баланса между технологическими амбициями, экономической целесообразностью и этической ответственностью. Ближайшие годы будут иметь решающее значение для определения того, удастся ли и как полностью реализовать этот трансформационный потенциал, при этом переход от специализированных приложений к более общим возможностям станет ключевым этапом.
Мы здесь для вас - советы - планирование - реализация - управление проектами
☑️ Поддержка МСП в разработке стратегии, консультировании, планировании и реализации.
☑️ Создание или корректировка цифровой стратегии и цифровизации.
☑️ Расширение и оптимизация процессов международных продаж.
☑️ Глобальные и цифровые торговые платформы B2B
☑️ Пионерское развитие бизнеса

Konrad Wolfenstein
Буду рад стать вашим личным консультантом.
Вы можете связаться со мной, заполнив контактную форму ниже, или просто позвонить мне по телефону +49 89 89 674 804 (Мюнхен) .
Я с нетерпением жду нашего совместного проекта.
Напиши мне

Xpert.Digital - Konrad Wolfenstein
Xpert.Digital — это промышленный центр с упором на цифровизацию, машиностроение, логистику/внутреннюю логистику и фотоэлектрическую энергетику.
С помощью нашего решения для развития бизнеса на 360° мы поддерживаем известные компании, начиная с нового бизнеса и заканчивая послепродажным обслуживанием.
Аналитика рынка, маркетинг, автоматизация маркетинга, разработка контента, PR, почтовые кампании, персонализированные социальные сети и привлечение потенциальных клиентов являются частью наших цифровых инструментов.
Дополнительную информацию можно узнать на сайте: www.xpert.digital - www.xpert.solar - www.xpert.plus
Оставаться на связи



















