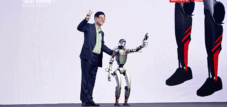
Sistemul TWIST: Tehnologia de captare a mișcării (MoCap) revoluționează controlul roboților umanoizi – Imagine: Xpert.Digital
Sistem teleoperat de imitație a întregului corp: Interacțiunea om-robot în timp real va schimba robotica
Mișcări umane pentru roboți: Potențialul sistemului TWIST
Oamenii de știință au realizat un progres semnificativ în dezvoltarea sistemelor de teleoperare pentru roboții umanoizi. Prin utilizarea tehnologiei de captare a mișcării, roboții umanoizi pot efectua acum mișcări asemănătoare oamenilor în timp real. Această inovație permite un control precis și intuitiv al roboților, reprezentând un pas important către dezvoltarea roboților cu dexteritate a întregului corp. Deosebit de remarcabil este noul sistem TWIST (Teleoperated Whole-Body Imitation System), care transmite mișcările complete ale corpului unei persoane către un robot, inaugurând astfel o nouă eră a interacțiunii om-robot.
Legat de asta:


Fundamentele teleoperației bazate pe captarea mișcării
Teleoperarea se referă la controlul de la distanță al mașinilor și are o importanță deosebită în domeniul roboticii. Sistemele telerobotice sunt utilizate atunci când spațiul de lucru este prea îndepărtat, prea mic, prea mare sau prea periculos pentru oameni. Decuplarea spațială dintre om (operator) și robot (teleoperator) permite aplicații în diverse domenii, cum ar fi chirurgia minim invazivă, dezamorsarea bombelor și aplicațiile spațiale.
Tehnologia de captare a mișcării (MoCap) stă la baza sistemelor moderne de teleoperare. Această tehnologie permite înregistrări și simulări detaliate ale mișcării umane, permițând digitalizarea indivizilor sau a grupurilor întregi de oameni. Mișcările captate sunt procesate inteligent și pot fi folosite pentru a anima corpurile și mișcările acestora.
Cum funcționează tehnologia de captare a mișcării
Tehnologia de captare a mișcării urmărește și înregistrează cu precizie mișcările corpului unor persoane reale folosind un costum special echipat cu markeri și sisteme optice. Acest proces colectează date despre mișcare din toate părțile corpului – nu doar din brațe, mâini, picioare și tălpi, ci și din trunchi, șolduri și cap. Aceste date complete sunt apoi transformate în comenzi pe care roboții umanoizi le pot executa folosind inteligența artificială (IA).
Sistemul TWIST: O descoperire revoluționară în teleoperarea roboților
Sistemul TWIST, dezvoltat la Universitatea Stanford și la Universitatea Simon Fraser, reprezintă un progres semnificativ în teleoperarea roboților umanoizi. Acesta combină tehnologia de captare a mișcării cu metode de învățare prin consolidare și învățare prin imitație.
„Ne dorim ca umanoizii să posede același nivel de dexteritate a întregului corp ca oamenii”, explică Yanjie Ze, autorul principal al studiului TWIST. „Imaginați-vă o bucătărie dezordonată. Oamenii pot ține lucruri cu ambele mâini și își pot folosi picioarele pentru a muta obstacole, cum ar fi un coș de pe podea. De asemenea, oamenii pot deschide ușa cu părțile laterale ale corpului sau cu coatele. Ne dorim ca umanoizii să poată face același lucru imitând direct oamenii.”
Implementarea tehnică a TWIST
Sistemul TWIST cuprinde trei componente esențiale:
- Achiziția de date și retargetarea: Prin retargetarea offline și online, mișcările umane sunt adaptate pentru robot. Acest lucru se realizează prin transmiterea optimizată a pozițiilor și orientărilor articulațiilor 3D, orientarea corpului și plasarea picioarelor fiind, de asemenea, ajustate în timp real.
- Antrenarea controlerului în simulare: TWIST utilizează o abordare în două etape cu o metodologie „profesor-elev”:
- Controlerul „Profesor” are acces privilegiat la mișcările de referință viitoare, ceea ce îi permite să planifice mișcări mai line.
- Controlerul „elev” este antrenat printr-o combinație de învățare prin consolidare (RL) și clonare comportamentală (BC) și poate accesa doar informațiile curente despre mișcare.
- Controler pentru întregul corp: Controlerul antrenat permite robotului să utilizeze toate gradele de libertate, menținând în același timp echilibrul. Acest lucru are ca rezultat mișcări mai naturale și mai asemănătoare cu cele umane.
În testele efectuate cu robotul umanoid G1 de la Unitree, cercetătorii au descoperit că acesta a fost suficient pentru a capta mișcările întregului corp și a le transfera cu precizie către articulațiile robotului, asigurându-se că mișcările diferitelor membre au fost coordonate.
Legat de asta:

Provocări în teleoperarea umanoidă
Dezvoltarea sistemelor de teleoperare pentru roboții umanoizi prezintă cercetătorilor mai multe provocări complexe:
Eliminarea decalajului de întruchipare
O provocare cheie este reducerea „decalajului de întruchipare” – diferențele anatomice dintre oameni și roboți. Deoarece roboții au proporții, configurații articulare și proprietăți fizice diferite față de oameni, un transfer direct al mișcărilor umane nu este ușor posibil.
Echilibrul și coordonarea întregului corp
Urmărirea întregului corp prin intermediul tehnologiei umanoide necesită nu doar controlul precis al articulațiilor individuale, ci și menținerea dinamică a echilibrului în timpul mișcărilor complexe. Sistemele convenționale de teleoperare se concentrează adesea doar pe mișcări izolate, cum ar fi locomoția sau manipularea, în timp ce TWIST permite mișcări coordonate ale întregului corp.
Latență și feedback senzorial
Sistemele de teleoperare trebuie să depășească probleme precum latența (întârzierea temporală) și limitările feedback-ului senzorial. Acești factori pot afecta sincronizarea acțiunilor umane cu răspunsurile robotice.
Diverse aplicații ale teleoperației prin captarea mișcării
Teleoperarea roboților umanoizi bazată pe captarea mișcării deschide numeroase posibilități de aplicare:
Situații periculoase și operațiuni de salvare
În medii periculoase, roboții teleoperați pot fi utilizați în locul oamenilor, de exemplu în eliminarea muniției explozive (EOD). Între 2015 și 2020, numai în Regatul Unit au existat aproximativ 2.000 de operațiuni EOD anual, ceea ce subliniază necesitatea unor alternative sigure.
Sarcini complexe de manipulare
Roboții umanoizi pot efectua sarcini complexe de manipulare prin teleoperare, de exemplu în medii nestructurate, cum ar fi bucătării sau ateliere. Capacitatea lor de a coordona utilizarea întregului corp, inclusiv brațele, mâinile, picioarele și tălpile, oferă avantaje cruciale în acest context.
Robotică socială și expresivitate
Pentru roboții sociali umanoizi, capacitatea de a efectua mișcări expresive este esențială. Sistemul OCRA (Algoritm de Retargetare Personalizabil bazat pe Optimizare), dezvoltat la MPI, permite maparea mișcării în timp real între diferite lanțuri cinematice, rezultând mișcări intuitive și asemănătoare cu cele umane.
Abordări alternative și compararea diferitelor sisteme
Pe lângă TWIST, există diverse alte abordări pentru teleoperarea bazată pe captarea mișcării:
Sisteme bazate pe IMU
Unii cercetători utilizează sisteme de captare a mișcării bazate pe IMU (Inertial Measurement Unit), care sunt portabile și mai puțin costisitoare decât sistemele optice. Această tehnologie este utilizată, de exemplu, pentru teleoperarea sarcinilor de locomanipulare, care combină locomoția și manipularea.
Abordări bazate pe rețele neuronale
O abordare alternativă folosește rețele neuronale pentru a învăța o corelare între datele senzorilor de la costumul de captare a mișcării și pozițiile unghiulare ale actuatoarelor robotului. Această metodă nu necesită un model analitic sau matematic prealabil al robotului și, prin urmare, poate fi aplicată la diverse perechi om-robot.
Sisteme pentru anumite părți ale corpului
Pe lângă sistemele de teleoperare a întregului corp, există și sisteme specializate care se concentrează pe anumite părți ale corpului, cum ar fi captarea mișcării cu două mâini. Aceste sisteme joacă un rol important în controlul precis al roboților bimanuali bionici pentru sarcini delicate de manipulare.
Legat de asta:


Progrese recente și perspective de viitor
Dezvoltarea sistemelor de teleoperare pentru roboții umanoizi progresează rapid. Pe lângă TWIST, cercetătorii au prezentat recent și alte sisteme inovatoare:
H2O: De la om la umanoid
Sistemul H2O permite teleoperarea în timp real a unui robot complet umanoid folosind doar o cameră RGB. Acesta utilizează un cadru bazat pe RL și un proces „sim-to-data” pentru a filtra și selecta mișcările potrivite pentru roboții umanoizi.
Teleoperare cu suport de realitate augmentată
Cercetătorii investighează, de asemenea, modul în care realitatea augmentată (AR) poate susține teleoperarea bazată pe captura de mișcare. Prin vizualizarea unei referințe virtuale a brațului uman alături de brațul robotului, utilizatorii pot înțelege mai bine maparea mișcării.
Inteligența artificială și captura de mișcare: viitorul interacțiunii om-robot
Teleoperarea roboților umanoizi bazată pe captarea mișcării a avansat considerabil în ultimii ani. Sisteme precum TWIST reprezintă un pas semnificativ înainte, permițând roboților să efectueze mișcări complete, asemănătoare celor umane, în timp real.
Combinația dintre tehnologia de captare a mișcării și metodele avansate de inteligență artificială, cum ar fi învățarea prin consolidare și clonarea comportamentului, deschide noi posibilități pentru interacțiunea om-robot. Roboții umanoizi pot efectua acum nu doar mișcări izolate, ci și acțiuni coordonate ale întregului corp, permițând o dexteritate și o expresivitate sporite.
În viitor, aceste tehnologii ar putea extinde semnificativ utilizarea roboților umanoizi în medii periculoase, pentru sarcini complexe de manipulare și în contexte sociale. Îmbunătățirea continuă a preciziei, robusteții și ușurinței în utilizare a sistemelor de teleoperare va contribui la reducerea și mai mult a decalajului dintre capacitățile umane și execuția robotică.
Legat de asta:
Partenerul dumneavoastră global de marketing și dezvoltare a afacerilor
☑️ Limba noastră de afaceri este engleza sau germana
☑️ NOU: Corespondență în limba ta maternă!

Konrad Wolfenstein
Eu și echipa mea suntem bucuroși să vă fim la dispoziție în calitate de consilier personal.
Mă puteți contacta completând formularul de contact de aici wolfenstein@xpert.digital:sau pur și simplu sunându-mă la +49 7348 4088 965. Adresa mea de e-mail este
Aștept cu nerăbdare proiectul nostru comun.