Cicha rewolucja ciężkich robotów w inżynierii mechanicznej: Dlaczego sztuczna inteligencja jest obecnie decydującym czynnikiem w przypadku najpotężniejszych robotów – Creative image Xpert.Digital
Potężniejsze niż kiedykolwiek wcześniej – a teraz także sprytniejsze: oto, co naprawdę potrafią nowe superroboty
### Zapomnij o hali fabrycznej: Te roboty-giganty podbijają teraz place budowy i farmy wiatrowe ### Koniec z klatkami: Jak wielotonowe roboty stają się bezpiecznymi towarzyszami dla ludzi ### Odpowiedź na niedobór wykwalifikowanych pracowników? Te roboty przejmują najtrudniejsze prace na świecie ### Starcie tytanów: Nie siła, ale oprogramowanie decyduje, kto zbuduje najlepszego robota ###
Ewolucja siły: najnowsze osiągnięcia w dziedzinie wysokowydajnych robotów ciężkich
Sektor robotów ciężkich przechodzi głęboką transformację, wykraczającą daleko poza samo zwiększanie udźwigu i zasięgu. Najnowsze osiągnięcia wskazują na zmianę paradygmatu w kierunku holistycznego podejścia, które priorytetowo traktuje inteligencję, adaptacyjność, łatwość obsługi i rozwój nowych aplikacji. Oprogramowanie, sztuczna inteligencja (AI) i zaawansowana mechatronika stały się głównymi czynnikami napędzającymi wartość, umożliwiając tym potężnym maszynom wykonywanie złożonych zadań w dynamicznych środowiskach, często w bezpośredniej współpracy z ludźmi. Do kluczowych trendów należą: zacieranie się granic między tradycyjnymi robotami przemysłowymi a systemami współpracującymi (cobotami), ekspansja na sektory takie jak budownictwo i energetyka odnawialna oraz rosnące znaczenie całkowitego kosztu posiadania (TCO) i zrównoważonego rozwoju. Zmiany te definiują nową generację robotów ciężkich, które są nie tylko silniejsze, ale co ważniejsze, inteligentniejsze, bardziej elastyczne i bardziej dostępne.
Nowa generacja robotów o dużej wytrzymałości: Nowa definicja mocy i precyzji
Rynek robotów ciężkich ewoluuje od czystej rywalizacji o maksymalny udźwig w kierunku zróżnicowanego krajobrazu, w którym priorytetem jest wydajność i efektywność dostosowana do konkretnych zastosowań. Wiodący producenci wyróżniają swoje produkty połączeniem mocy, szybkości, kompaktowości i inteligentnej konstrukcji.
Definicja nowoczesnej klasy ciężkiej: coś więcej niż tylko surowa moc
Roboty o dużej wytrzymałości są projektowane do obsługi ładunków o masie zazwyczaj od 250 kg i/lub wymagających zasięgu ponad 4 metrów. Stanowią one podstawę takich branż jak przemysł motoryzacyjny, inżynieria mechaniczna, odlewnictwo i coraz częściej budownictwo, gdzie przenoszą masywne elementy, takie jak bloki silników, belki stalowe i całe nadwozia pojazdów. Zakres udźwigu jest ogromny i sięga od kilkuset kilogramów do obecnego szczytu 2300 kg.
Ocena nowoczesnych robotów ciężkich ewoluowała. Chociaż maksymalna ładowność pozostaje kluczowym kryterium, coraz większą uwagę przywiązuje się do holistycznych wskaźników efektywności. Należą do nich stosunek ładowności do masy, wymagana powierzchnia zabudowy, zużycie energii oraz możliwość precyzyjnego i dynamicznego operowania ładunkami o wysokim momencie bezwładności. Kryteria te odzwierciedlają głębsze zrozumienie całkowitego kosztu posiadania (TCO) oraz wymagań nowoczesnych, elastycznych środowisk produkcyjnych.
Krajobraz konkurencyjny i modele flagowe (2024-2026)
Na rynku dominują uznani gracze, tacy jak KUKA, Fanuc, ABB i Yaskawa, podczas gdy nowi konkurenci, tacy jak chiński Estun, zyskują coraz większe znaczenie. Strategie tych firm wykazują znaczną rozbieżność, wykraczającą poza samą maksymalizację ładowności.
Fanuc pozostaje niekwestionowanym liderem rynku w segmencie ultraciężkich robotów dzięki serii M-2000iA. Model M-2000iA/2300, o udźwigu 2,3 tony, to najmocniejszy na świecie 6-osiowy robot przegubowy i idealnie nadaje się do zadań wymagających absolutnie maksymalnej siły, takich jak podnoszenie kompletnych podwozi pojazdów.
Firma KUKA realizuje strategię optymalizacji wydajności. Seria KR FORTEC ultra oferuje udźwig do 800 kg, ale charakteryzuje się wyjątkowo dobrym stosunkiem udźwigu do masy oraz kompaktową konstrukcją. Osiągnięto to dzięki innowacyjnym rozwiązaniom konstrukcyjnym, takim jak system dwuramienny, który zwiększa sztywność bez nadmiernego wzrostu masy. Do zastosowań związanych z paletyzacją, seria KR 1000 titan oferuje modele o udźwigu do 1300 kg.
ABB pozycjonuje swojego flagowego robota IRB 8700 jako najszybszego robota w swojej klasie. Dzięki udźwigowi do 800 kg (lub 1000 kg z odchylonym nadgarstkiem) osiąga on o 25% krótszy czas cyklu niż porównywalne modele. ABB podkreśla również swoją niezawodność dzięki uproszczonej konstrukcji mechanicznej z tylko jednym silnikiem i przekładnią na oś, co ogranicza konserwację i obniża całkowity koszt posiadania.
Yaskawa oferuje szeroką gamę produktów, w tym model Motoman MH600 o udźwigu 600 kg. Jego równoległa konstrukcja przegubów zapewnia wysoką stabilność i sztywność, co jest szczególnie korzystne podczas przenoszenia elementów o wysokim momencie bezwładności. Seria GP została zaprojektowana do zastosowań wymagających dużej prędkości.
Na rynku pojawiają się również nowi konkurenci, tacy jak Estun i Kawasaki. Estun, największy chiński producent robotów przemysłowych, planuje wprowadzić na rynek europejski modele takie jak ER 13300 o udźwigu 1000 kg. Kawasaki rozszerza swoje portfolio o model MXP710L (710 kg) oraz serię M, która może udźwignąć do 1500 kg.
Te różne podejścia pokazują, że rynek robotów ciężkich ewoluował od jednowymiarowego wyścigu o najwyższy udźwig do bardziej zróżnicowanego krajobrazu konkurencyjnego. Producenci konkurują obecnie w oparciu o specjalistyczne parametry wydajnościowe, dostosowane do konkretnych wymagań klienta – czy to maksymalną siłę, wydajność w ograniczonej przestrzeni, czy maksymalną prędkość. Pozwala to użytkownikom wybrać rozwiązanie zoptymalizowane pod kątem indywidualnych warunków produkcyjnych, zamiast po prostu decydować się na najmocniejszy dostępny model.
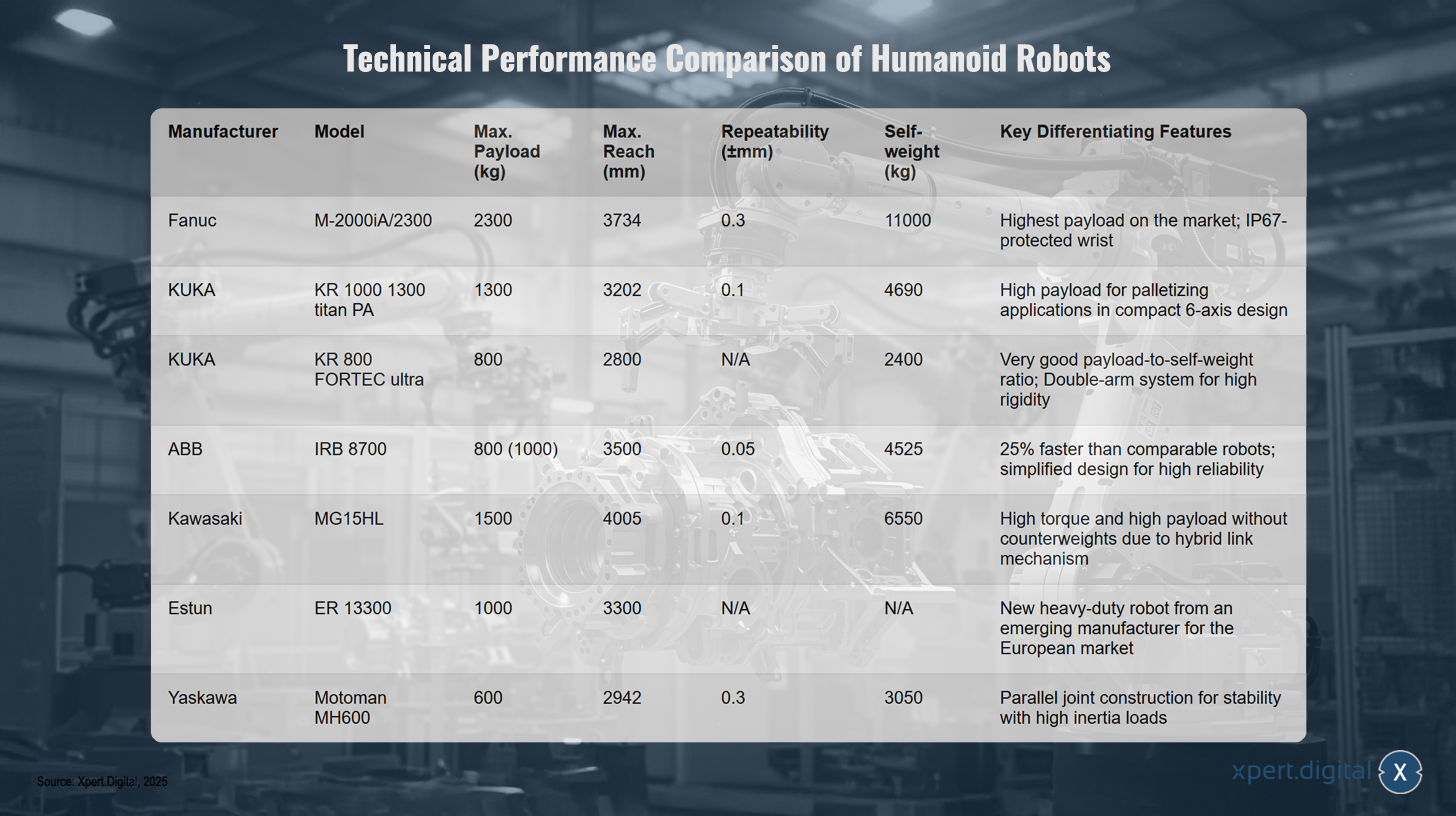
Giganci robotów: porównanie najpotężniejszych robotów przemysłowych
Giganci robotów: porównanie najpotężniejszych robotów przemysłowych – zdjęcie: Xpert.Digital
W świecie robotów przemysłowych istnieją imponujące giganty, które wyróżniają się ogromnym udźwigiem i specyfikacją techniczną. Producenci tacy jak Fanuc, KUKA, ABB, Kawasaki, Estun i Yaskawa walczą o pozycję lidera w tym segmencie rynku.
Robot Fanuc M-2000iA/2300 wyróżnia się wyjątkowym udźwigiem 2300 kg i nadgarstkiem o stopniu ochrony IP67. KUKA prezentuje KR 1000 1300 titan PA, robota o udźwigu 1300 kg, idealnego do paletyzacji i charakteryzującego się kompaktową, 6-osiową konstrukcją. ABB IRB 8700 wyróżnia się o 25% wyższą prędkością w porównaniu z podobnymi modelami oraz uproszczoną konstrukcją, zapewniającą maksymalną niezawodność.
Silnik Kawasaki MG15HL wykorzystuje hybrydowy mechanizm łączący, który umożliwia uzyskanie wysokiego momentu obrotowego i ładowności bez dodatkowych przeciwwag. Yaskawa Motoman MH600 imponuje równoległą konstrukcją układu łączącego, która gwarantuje stabilność pod obciążeniami o wysokim momencie bezwładności.
Ciekawym debiutantem jest Estun ER 13300, robot o dużej wytrzymałości, który ma szansę podbić rynek europejski. Roboty te w imponujący sposób demonstrują postęp technologiczny w dziedzinie automatyki przemysłowej i ciągłą innowacyjność wiodących producentów.
Silnik inteligencji: sztuczna inteligencja i oprogramowanie jako kluczowe cechy różnicujące
Najważniejsze postępy w dziedzinie robotów ciężkich nie mają już charakteru czysto mechanicznego. To połączenie robotyki ze sztuczną inteligencją i zaawansowanym oprogramowaniem, które fundamentalnie rozszerza możliwości tych maszyn i rewolucjonizuje ich działanie.
Od automatyzacji do autonomii: wpływ sztucznej inteligencji i uczenia maszynowego
Sztuczna inteligencja i uczenie maszynowe (ML) przekształcają roboty przemysłowe ze sztywnych, wstępnie zaprogramowanych narzędzi w adaptacyjne, inteligentne systemy zdolne do postrzegania, podejmowania decyzji i uczenia się. Ta transformacja ma kluczowe znaczenie dla zarządzania zmiennością i złożonością w nowoczesnych procesach produkcyjnych i logistycznych.
Zaawansowana percepcja („oczy”)
Współczesne roboty nie działają już na ślepo. Są wyposażone w wysoce zaawansowane systemy czujników, w tym systemy wizyjne 2D i 3D, LiDAR i kamery stereoskopowe, które umożliwiają im kompleksowe zrozumienie otoczenia. Ta zdolność percepcyjna jest napędzana przez algorytmy głębokiego uczenia się, które umożliwiają rozpoznawanie, lokalizację i segmentację obiektów, co w pierwszej kolejności umożliwia ich wykorzystanie w środowiskach nieustrukturyzowanych.
Przypadek użycia – pobieranie z pojemnika: Systemy takie jak KUKA.SmartBinPicking wykorzystują zaawansowane przetwarzanie obrazu do identyfikacji losowo ułożonych obiektów w pojemniku, określania ich punktów chwytania i bezpiecznego ich usuwania – zadanie, które jest praktycznie niemożliwe do wykonania przy użyciu tradycyjnego programowania opartego na regułach.
Przypadek użycia – Wykrywanie na placu budowy: Badania aktywnie rozwijają modele rozpoznawania obiektów oparte na technologii YOLO (You Only Look Once). Umożliwiają one robotom identyfikację pracowników, pojazdów i konstrukcji budynków na dynamicznych placach budowy, co jest fundamentalnym wymogiem autonomicznego działania w tak złożonych środowiskach.
Inteligentne zarządzanie zadaniami („mózg”)
Sztuczna inteligencja służy nie tylko do widzenia, ale i do działania. Modele uczenia maszynowego umożliwiają robotom dostosowywanie swoich działań do zmieniających się warunków w czasie rzeczywistym.
Przykład zastosowania – Depaletyzacja wspomagana sztuczną inteligencją: FANUC wykorzystuje systemy wizyjne sterowane sztuczną inteligencją, aby umożliwić robotom autonomiczne rozładowywanie palet mieszanych o różnych rozmiarach i pozycjach kartonów. Takie systemy mogą przetwarzać ponad dziewięć kartonów na minutę, zastępując w ten sposób niezwykle żmudną pracę ręczną.
Przykład zastosowania – Spawanie wspomagane sztuczną inteligencją: Systemy nowej generacji, takie jak NovAI™, wykorzystują wizję maszynową i sztuczną inteligencję do adaptacyjnego spawania w czasie rzeczywistym. Potrafią śledzić spoiny, dostosowywać się do wymiarów szczelin i spoin sczepnych oraz dynamicznie korygować parametry spawania. Automatyzuje to procesy, które wcześniej uznawano za zbyt niespójne dla robotyki ze względu na tolerancje komponentów i stanowi znaczący postęp w budownictwie ciężkim w branżach takich jak przemysł stoczniowy.
Rewolucja w łatwości obsługi: uproszczenie złożoności dzięki zaawansowanemu oprogramowaniu
Tradycyjnie programowanie robotów przemysłowych było zadaniem wysoce specjalistycznym, wymagającym dogłębnej znajomości zastrzeżonych języków programowania, takich jak KRL (KUKA) czy RAPID (ABB). Stanowiło to wysoką barierę wejścia i spowalniało wdrażanie rozwiązań automatyzacyjnych.
Systemy operacyjne nowej generacji
Wiodący producenci radzą sobie z tym wąskim gardłem, opracowując nowe, intuicyjne systemy operacyjne, mające na celu demokratyzację obsługi robotów.
KUKA iiQKA.OS: Nowoczesny system operacyjny oparty na systemie Linux z internetowym interfejsem użytkownika (iiQKA.UI), zaprojektowany tak, aby był równie łatwy w obsłudze, co smartfon. Obsługuje programowanie oparte na instrukcjach, umożliwia wirtualne uruchomienie i został zaprojektowany z myślą o wspieraniu całego ekosystemu aplikacji i sprzętu innych firm („Republika Robotyczna”).
FANUC iHMI: „Inteligentny interfejs człowiek-maszyna” to graficzny, oparty na ekranie dotykowym interfejs użytkownika, zaprojektowany w celu radykalnego skrócenia czasu konfiguracji i szkoleń. Integruje on narzędzia planowania, edycji i doskonalenia, takie jak szacowanie czasu cyklu i zarządzanie konserwacją, w jednym, przyjaznym dla użytkownika interfejsie.
Demokratyzacja programowania
Trend wyraźnie zmierza w kierunku interakcji bezkodowej lub z niskim kodem. Wizualne środowiska programistyczne z funkcją „przeciągnij i upuść” oraz graficznymi edytorami przepływu pracy stają się standardem. Metody „nauczania przez demonstrację”, w których operator ręcznie kieruje ramieniem robota podczas wykonywania ruchu (manualne sterowanie) lub używa zewnętrznych narzędzi, takich jak Wandelbots Tracepen, do „zademonstrowania” robotowi zadania, dodatkowo obniżają barierę programowania.
Siła symulacji (Cyfrowe bliźniaki)
Oprogramowanie do programowania i symulacji offline, takie jak KUKA.Sim czy ABB RobotStudio, stało się niezastąpionym narzędziem. Umożliwia ono firmom wirtualne projektowanie, testowanie i optymalizację kompletnych stanowisk robotycznych jeszcze przed zamówieniem fizycznego sprzętu. To „wirtualne uruchomienie” znacznie skraca rzeczywisty czas konfiguracji, minimalizuje ryzyko poprzez wczesne wykrywanie kolizji lub problemów z dostępnością oraz umożliwia programowanie równolegle z zakupem sprzętu.
Te zmiany wskazują na fundamentalną zmianę w robotyce. Producenci nie sprzedają już wyłącznie ramienia robota z kontrolerem, ale budują całe platformy cyfrowe. Platformy te obejmują systemy operacyjne, sklepy z aplikacjami, sieci partnerskie i łączność w chmurze. Firma KUKA aktywnie promuje ekosystem partnerski („Robotic Republic”) dla iiQKA z otwartymi interfejsami dla dostawców zewnętrznych. Jednocześnie platformy takie jak ctrlX AUTOMATION firmy Bosch Rexroth umożliwiają sterowanie robotami różnych marek (ABB, KUKA, FANUC) za pośrednictwem ujednoliconego interfejsu. Ten rozwój odzwierciedla transformację na rynku smartfonów, gdzie wartość urządzenia w dużej mierze zależy od jego ekosystemu aplikacji. Konkurencja przesuwa się zatem od czystych specyfikacji sprzętowych w stronę siły i otwartości ekosystemu oprogramowania. Dla użytkowników oznacza to mniejsze uzależnienie od jednego producenta, szybsze innowacje i dostęp do szerszej gamy specjalistycznych rozwiązań. Robot staje się platformą sprzętową, na której budowane jest rozwiązanie automatyzacji definiowanej programowo.
🎯🎯🎯 Skorzystaj z bogatej, pięciokrotnej wiedzy eksperckiej Xpert.Digital w ramach jednego kompleksowego pakietu usług | BD, R&D, XR, PR i optymalizacja widoczności cyfrowej


Skorzystaj z bogatej, pięciokrotnej wiedzy specjalistycznej Xpert.Digital w ramach kompleksowego pakietu usług | Badania i rozwój, XR, PR i optymalizacja widoczności cyfrowej — Zdjęcie: Xpert.Digital
Xpert.Digital posiada dogłębną wiedzę z różnych branż. Pozwala nam to opracowywać strategie dopasowane do indywidualnych potrzeb i wyzwań konkretnego segmentu rynku. Dzięki ciągłej analizie trendów rynkowych i monitorowaniu rozwoju branży, możemy działać proaktywnie i oferować innowacyjne rozwiązania. Połączenie doświadczenia i wiedzy specjalistycznej generuje wartość dodaną i zapewnia naszym klientom zdecydowaną przewagę konkurencyjną.
Więcej informacji tutaj:
Nowa mechatronika: Jak roboty o dużej wytrzymałości przekraczają granice fizyczne
Zaawansowana mechatronika: fizyczna ewolucja mocy
Wraz z szybkim postępem w oprogramowaniu i sztucznej inteligencji, ewoluuje również fizyczna forma ciężkich robotów. Innowacje w projektowaniu, materiałoznawstwie i technologii efektorów końcowych mają kluczowe znaczenie dla przełożenia tej zwiększonej inteligencji na wydajność mechaniczną.
Innowacje w projektowaniu i materiałach: większa wydajność przy mniejszej masie
Kluczowym trendem jest rozwój robotów lżejszych i bardziej kompaktowych, oferujących ten sam lub nawet większy udźwig. Na przykład KUKA KR Fortec jest nawet o 700 kg lżejszy od swojego poprzednika, a seria KR FORTEC ultra może pochwalić się wiodącym w swojej klasie stosunkiem udźwigu do masy. Ta redukcja masy zmniejsza wymagania dotyczące fundamentów, zmniejsza zużycie energii i umożliwia wdrożenie w gęsto zaludnionych i ograniczonych przestrzennie zakładach produkcyjnych.
Jest to możliwe dzięki zaawansowanym koncepcjom kinematycznym. System dwuramienny firmy KUKA i niezwykle sztywna konstrukcja ramion firmy Fanuc zwiększają precyzję i redukują drgania przy dużych prędkościach i dużych obciążeniach. Hybrydowy mechanizm łączący Kawasaki eliminuje potrzebę stosowania dużych przeciwwag, zwiększając tym samym przestrzeń roboczą robota.
Kolejnym ważnym aspektem jest modułowość. Serie robotów, takie jak te firmy KUKA (KR Quantec, Fortec, Fortec ultra), coraz częściej korzystają ze wspólnych komponentów, takich jak centralne dłonie. Upraszcza to konserwację i obniża koszty magazynowania części zamiennych dla klientów korzystających ze zróżnicowanej floty robotów.
Do zastosowań w ekstremalnych warunkach, specjalistyczne wersje, takie jak „Foundry” lub „Hygienic”, są teraz standardem. Modele te charakteryzują się nadgarstkami i korpusami o stopniu ochrony IP67, powłokami odpornymi na temperaturę i korozję oraz smarami dopuszczonymi do kontaktu z żywnością, co umożliwia ich stosowanie w odlewniach, kuźniach i zakładach przetwórstwa spożywczego.
Efektory końcowe nowej generacji: ręce robota
Chwytaki na końcu ramienia robota, zwane efektorami końcowymi, ewoluują od prostych zacisków pneumatycznych do złożonych systemów mechatronicznych. Są one coraz częściej wyposażone w zaawansowane czujniki zapewniające funkcjonalność adaptacyjną. Chociaż nadal znajdują zastosowanie głównie w aplikacjach o mniejszym udźwigu, zasady miękkiej robotyki i bioniki wpływają na technologię chwytaków. Celem jest obsługa większej różnorodności kształtów obiektów i materiałów z większą niezawodnością i mniejszą siłą. W przypadku ciężkich i złożonych obiektów opracowywane są wieloosiowe, w pełni napędzane mechanizmy, które umożliwiają precyzyjną manipulację.
Czujniki siły i momentu obrotowego zamontowane na nadgarstku zapewniają robotowi „zmysł dotyku”. Umożliwiają mu one wykonywanie delikatnych zadań, takich jak precyzyjne łączenie elementów, przykładanie określonej siły podczas szlifowania lub bezpieczne reagowanie na nieoczekiwane kolizje.
Ekosystem czujników: podstawa percepcji i bezpieczeństwa
Nowoczesne roboty o dużej wytrzymałości opierają się na bogatym ekosystemie czujników wewnętrznych i zewnętrznych. Czujniki wewnętrzne, takie jak enkodery silników i czujniki momentu obrotowego w przegubach, są niezbędne do precyzyjnego sterowania ruchem. Czujniki zewnętrzne, takie jak kamery 3D, LiDAR i czujniki ultradźwiękowe, dostarczają danych do percepcji otoczenia i umożliwiają bezpieczną współpracę człowieka z robotem. Zintegrowane systemy ochrony przed kolizją i przeciążeniem mogą uruchomić zatrzymanie awaryjne w przypadku kolizji lub nadmiernego obciążenia, chroniąc w ten sposób zarówno robota, jak i obrabiany element. Systemy te stają się coraz bardziej zaawansowane i oferują obecnie funkcje takie jak pneumatycznie regulowane progi wyzwalania.
Zrównoważony rozwój i wydajność: skupienie się na całkowitym koszcie posiadania (TCO)
Efektywność energetyczna stała się kluczowym celem projektowania. Dzięki lekkiej konstrukcji, zoptymalizowanym programowo ścieżkom ruchu i energooszczędnym trybom czuwania, producenci zmniejszają zużycie energii przez swoje roboty. To nie tylko obniża koszty operacyjne, ale także zmniejsza wpływ rozwiązania automatyzacji na środowisko. Uproszczone konstrukcje mechaniczne, takie jak te stosowane przez ABB, z tylko jednym silnikiem na oś, oraz modułowa konstrukcja przekładają się na wyższą niezawodność (średni czas między awariami, MTBF) i krótszy czas naprawy (średni czas do naprawy, MTTR), co dodatkowo obniża ogólne koszty operacyjne.
Postęp w mechatronice jest ściśle powiązany z rozwojem oprogramowania i sztucznej inteligencji (AI). Sztywniejsza, mniej podatna na drgania konstrukcja ramienia (ulepszenie sprzętu) jest warunkiem wstępnym dla zaawansowanego oprogramowania do sterowania ruchem (ulepszenie oprogramowania), które umożliwia robotowi szybsze i bardziej precyzyjne poruszanie się. Algorytmy planowania ścieżki oparte na AI mogą następnie obliczyć najbardziej energooszczędną trajektorię dla właśnie tej kinematyki. Zintegrowane czujniki siły i momentu obrotowego z kolei zapewniają sprzężenie zwrotne w czasie rzeczywistym, umożliwiając oprogramowaniu sterującemu reagowanie na nieprzewidziane siły i zwiększanie niezawodności procesu. Wydajność nowoczesnego robota o dużej wytrzymałości jest zatem wyłaniającą się cechą całego systemu, w którym mechanika, czujniki i oprogramowanie są nierozerwalnie ze sobą powiązane.
Rozszerzone horyzonty: nowe obszary zastosowań dla robotyki ciężkiej
Postęp technologiczny w dziedzinie sztucznej inteligencji, oprogramowania i mechatroniki umożliwia wykorzystanie robotów o dużej wytrzymałości w branżach, które wcześniej opierały się na pracy ręcznej lub sztywnej automatyzacji. Roboty opuszczają kontrolowane hale fabryczne i podbijają dynamiczne i nieustrukturyzowane środowiska.
Zautomatyzowany plac budowy
Branża budowlana stoi przed ogromnymi wyzwaniami z powodu niedoboru wykwalifikowanych pracowników, wysokiego ryzyka związanego z bezpieczeństwem i rosnącej presji na produktywność. W rezultacie 81% firm budowlanych planuje wprowadzenie robotów w ciągu najbliższych dziesięciu lat.
Zastosowania: Roboty o dużej wytrzymałości obsługują masywne elementy, takie jak profile stalowe, prefabrykaty betonowe i modułowe jednostki mieszkalne. Są wykorzystywane w zautomatyzowanej produkcji, na przykład do wiercenia, nitowania i mocowania dużych elementów. Konkretnym przykładem jest Fischer BauBot, który został opracowany specjalnie do prac wiertniczych i kotwiących na dużych placach budowy. Roboty mogą być również wyposażone w narzędzia tnące, aby obrabiać elementy betonowe i stalowe na miejscu z wysoką precyzją.
Kluczowe technologie: Sukces w tym niestrukturyzowanym środowisku w dużej mierze zależy od opartego na sztucznej inteligencji rozpoznawania obiektów w celu identyfikacji materiałów i przeszkód, a także od solidnych, mobilnych platform.
Energia przyszłości: Automatyzacja w produkcji energii odnawialnej
Gwałtowny rozwój odnawialnych źródeł energii wymaga szybszej i bardziej ekonomicznej produkcji oraz instalacji dużych podzespołów, takich jak łopaty turbin wiatrowych i elektrownie słoneczne.
Energetyka wiatrowa: W produkcji łopat turbin wiatrowych roboty są wykorzystywane do obróbki końcowej (przycinania, szlifowania, wypełniania), co poprawia jakość i odciąża pracowników od niebezpiecznych zadań. W technologii automatycznego układania włókien (AFP) ramiona robota precyzyjnie układają paski włókna węglowego lub szklanego, aby uzyskać lżejsze i mocniejsze łopaty wirnika. Specjalne systemy robotyczne przetwarzają nasady łopat (piłowanie, frezowanie, wiercenie) i skracają czas cyklu nawet o 50% w porównaniu z maszynami konwencjonalnymi.
Energia słoneczna: Firmy takie jak Charge Robotics i Terabase opracowują mobilne „fabryki”, które automatycznie montują wstępnie i instalują całe sekcje modułów słonecznych bezpośrednio na placach budowy farm fotowoltaicznych, co potencjalnie podwaja wydajność. Robot „Maximo” firmy AES wykorzystuje sztuczną inteligencję, technologię LiDAR i system wizyjny do automatyzacji podnoszenia i montażu ciężkich paneli słonecznych, skracając czas i koszty nawet o 50%. System Hyperflex firmy Comau to mobilna fabryka umieszczona w naczepie, która montuje i instaluje trackery słoneczne bezpośrednio w terenie.
Modernizacja przemysłu ciężkiego: Budownictwo okrętowe i lotnictwo
Budownictwo okrętowe: Ta tradycyjnie słabo zautomatyzowana branża zaczyna wykorzystywać mobilne roboty o dużej wytrzymałości. MR4Weld, opracowany przez Comau we współpracy ze stocznią Fincantieri, to autonomiczny, mobilny robot spawalniczy, zdolny do poruszania się po nieustrukturyzowanym środowisku stoczni w celu wykonywania prac spawalniczych na dużych sekcjach kadłuba. Zapewnia to nową elastyczność i wydajność w montażu masywnych konstrukcji stalowych.
Lotnictwo i kosmonautyka: W tym przypadku do wiercenia, nitowania i łączenia dużych podzespołów samolotów, takich jak skrzydła i części kadłuba, wykorzystuje się niezwykle precyzyjne roboty o dużej wytrzymałości, gdzie wymagana jest najwyższa dokładność i powtarzalność.
Zamknięcie obiegu: rola w gospodarce o obiegu zamkniętym
Cele zrównoważonego rozwoju i przepisy UE zwiększają potrzebę efektywnego recyklingu i ponownego przetwarzania złożonych produktów.
Automatyczny demontaż: Roboty o dużej wytrzymałości idealnie nadają się do demontażu dużych i ciężkich produktów.
Akumulatory pojazdów elektrycznych: Ze względu na dużą masę i potencjalne zagrożenia (elektryczne, chemiczne), demontaż akumulatorów pojazdów elektrycznych wspomagany robotem jest kluczowym czynnikiem dla bezpiecznego i ekonomicznego recyklingu. Projekty badawcze opracowują ogniwa robotyczne, które automatycznie oddzielają moduły i ogniwa akumulatorowe.
Duża elektronika i silniki: Instytut Fraunhofera pracuje nad systemami robotycznymi, które wykorzystują sztuczną inteligencję i wizję maszynową do automatycznego demontażu komputerów, pralek i silników elektrycznych w celu odzyskania cennych materiałów, takich jak miedź i magnesy ziem rzadkich. To ważny krok w kierunku ustanowienia „górnictwa miejskiego”.
Te nowe obszary zastosowań mają wspólną cechę: przenoszą robota z wysoce ustrukturyzowanego, przewidywalnego środowiska hali fabrycznej do dynamicznego, nieustrukturyzowanego i często surowego „pola”. Ta zmiana środowiska jest głównym motorem rozwoju technologicznego w dziedzinie sztucznej inteligencji, technologii czujników i mechatroniki. Wyzwanie techniczne przenosi się z optymalizacji powtarzalnych ruchów na zarządzanie niepewnością. Przyszły sukces będzie zależał mniej od stopniowej poprawy szybkości lub precyzji, a bardziej od przełomowych odkryć w zakresie percepcji otoczenia, autonomicznej nawigacji i adaptacyjnego planowania zadań.
Nasza rekomendacja: 🌍 Nieograniczony zasięg 🔗 Połączony 🌐 Wielojęzyczny 💪 Siła sprzedaży: 💡 Autentyczność ze strategią 🚀 Innowacja spotyka się z 🧠 Intuicją


Od lokalnego do globalnego: MŚP podbijają rynek światowy dzięki sprytnej strategii - Zdjęcie: Xpert.Digital
W czasach, gdy cyfrowa obecność firmy decyduje o jej sukcesie, wyzwaniem jest stworzenie autentycznej, spersonalizowanej i dalekosiężnej obecności. Xpert.Digital oferuje innowacyjne rozwiązanie, które łączy w sobie funkcje centrum branżowego, bloga i ambasadora marki. Łączy zalety kanałów komunikacji i sprzedaży na jednej platformie, umożliwiając publikację w 18 różnych językach. Współpraca z portalami partnerskimi oraz możliwość publikowania artykułów w Google News i lista dystrybucyjna prasy obejmująca około 8000 dziennikarzy i czytelników maksymalizują zasięg i widoczność treści. Stanowi to kluczowy czynnik w sprzedaży zewnętrznej i marketingu (SMarketing).
Więcej informacji tutaj:
Rozwój, możliwości, przeszkody: strategie dla robotyki ciężkiej
Granica współpracy: bezpieczna interakcja człowieka z robotem przy dużym obciążeniu
Pojawiającym się i pozornie sprzecznym trendem jest stosowanie zasad współpracy do robotów zdolnych do wywierania potencjalnie śmiercionośnej siły. Ten rozwój przekształca ciężkie roboty z odizolowanych maszyn w potężnych towarzyszy broni.
Poza klatką: spektrum współpracy
Tradycyjna koncepcja bezpieczeństwa, polegająca na obsłudze ciężkich robotów w specjalnych obudowach, jest nieefektywna i prowadzi do sztywnego podziału między zadaniami wykonywanymi przez człowieka i maszynę. Współczesna współpraca człowieka z robotem (HRC) nie jest jednak jednolitą koncepcją, lecz spektrum obejmującym od prostego współistnienia (robot zatrzymuje się, gdy człowiek wchodzi w jego obszar roboczy) do ścisłej współpracy (człowiek i robot pracują jednocześnie nad tym samym elementem).
Główną zaletą tego podejścia jest to, że w przeciwieństwie do tradycyjnych, lekkich robotów współpracujących, przemysłowe roboty współpracujące nie podlegają ograniczeniom dotyczącym udźwigu, prędkości ani precyzji. Oferują zatem to, co najlepsze z obu światów: wydajność robota przemysłowego i elastyczność aplikacji współpracujących.
Kluczowe technologie dla bezpiecznego transportu ciężkiego MRK
Bezpieczna współpraca człowieka z robotem w przypadku robotów o dużej wytrzymałości jest możliwa dzięki połączeniu zaawansowanych czujników i inteligentnych funkcji sterowania.
Zaawansowane czujniki bezpieczeństwa: Podstawą bezpiecznej współpracy człowieka z robotem (HRC) jest zdolność systemu do wykrywania obecności i intencji człowieka. Jest to możliwe dzięki certyfikowanym skanerom laserowym, kamerom 3D, a nawet podłogom czułym na nacisk, które tworzą dynamiczne, wielowarstwowe pola ochronne wokół robota.
Monitorowanie prędkości i separacji (SSM): To kluczowa metoda współpracy, w której prędkość robota jest odwrotnie proporcjonalna do odległości od człowieka. Gdy człowiek się zbliża, robot zwalnia. Jeśli człowiek podejdzie zbyt blisko, robot zatrzymuje się w bezpiecznym, monitorowanym miejscu. Umożliwia to płynną i efektywną interakcję bez barier fizycznych.
Ograniczanie mocy i siły (PFL): Chociaż jest to trudne ze względu na dużą bezwładność ciężkich robotów, zaawansowane systemy sterowania i czujniki momentu obrotowego w każdym przegubie pozwalają nawet dużym robotom pracować w trybie ograniczonej siły podczas wykonywania niektórych zadań. Zatrzymują się natychmiast po nieoczekiwanym kontakcie. Funkcja ta jest często wykorzystywana do prowadzenia ręcznego lub zadań związanych z przenoszeniem.
Standaryzacja i ocena ryzyka: Wdrażanie bezpiecznych aplikacji współpracy człowiek-robot (HRC) jest regulowane normami takimi jak EN ISO 10218 oraz specyfikacją techniczną ISO/TS 15066. Podstawowym wymogiem jest zawsze staranna ocena ryzyka dla całego zastosowania – tj. robota, chwytaka, obrabianego przedmiotu i otoczenia. Nawet robot, który jest z natury bezpieczny, może obsługiwać niebezpieczne narzędzie.
Te zmiany prowadzą do redefinicji terminu „cobot”. Tradycyjnie termin ten był synonimem małych, lekkich i z natury bezpiecznych ramion robotycznych. Integracja funkcjonalności współpracy z ciężkimi robotami przemysłowymi przełamuje ten paradygmat. „Współpracujący” ewoluuje z rzeczownika (rodzaju robota, „cobota”) do przymiotnika lub zestawu funkcji („aplikacja robota współpracującego”). Przyszłość nie leży w binarnym wyborze między „cobotem” a „robotem przemysłowym”, ale w wyborze robota przemysłowego o odpowiednim udźwigu i wydajności, który następnie zostanie wyposażony w funkcje bezpieczeństwa niezbędne do konkretnego zastosowania. To radykalnie rozszerza potencjał współpracy człowieka z robotem (HRC) na obszary wcześniej niedostępne dla ścisłej współpracy człowieka z maszyną, takie jak montaż ciężkich maszyn czy logistyka.
RaaS wyjaśnia: Jak firmy mogą obniżyć barierę wejścia dla robotów
Rynek robotów ciężkich jest gotowy na stały wzrost, napędzany innowacjami technologicznymi i ekspansją na nowe sektory. Jednak skuteczne wdrożenie wymaga od firm podejmowania strategicznych decyzji wykraczających poza samą ocenę technologii.
Wielkość rynku i prognozy wzrostu
Globalny rynek robotyki przemysłowej to znaczący i rozwijający się sektor. Prognozy wielkości rynku różnią się w zależności od zakresu i metodologii analizy, ale konsekwentnie wskazują na pozytywny trend
- Pewna analiza prognozuje wzrost z 33,9 mld USD w 2024 r. do 60,5 mld USD w 2030 r., co odpowiada średniorocznej stopie wzrostu (CAGR) wynoszącej 9,9%.
- Inne badanie przewiduje wzrost z 16,9 mld USD (2024 r.) do 29,4 mld USD do 2029 r. (CAGR 11,7%).
- Trzecia prognoza przewiduje wzrost z 19,9 mld USD (2024 r.) do 55,5 mld USD do 2032 r. (CAGR 14,2%).
Wartość rynku „ciężkich platform robotycznych” oszacowano na 333,5 mln USD w 2024 r., z prognozą na 446 mln USD do 2030 r. (CAGR 5,0%). Rozbieżność z ogólnymi danymi pokazuje, że roboty ciężkie stanowią segment rynku o wysokiej wartości, ale o mniejszym niż przeciętny udziale.
Według Międzynarodowej Federacji Robotyki (IFR), globalny zasób robotów przemysłowych osiągnął rekordowy poziom 4,28 miliona sztuk w 2023 roku, co stanowi wzrost o 10% w porównaniu z rokiem poprzednim. Chociaż w 2024 roku nastąpiła tymczasowa recesja rynku, oczekuje się, że długoterminowy trend wzrostowy powróci od 2025 roku. Azja, a w szczególności Chiny, pozostają największym i najszybciej rozwijającym się rynkiem, na który przypada 70% nowych instalacji.
Kluczowe czynniki wzrostu i przeszkody
Czynniki napędzające wzrost:
- Niedobór wykwalifikowanych pracowników i zmiany demograficzne: W wielu krajach uprzemysłowionych brak wykwalifikowanych pracowników powoduje automatyzację zadań wymagających dużej sprawności fizycznej i powtarzalnych czynności.
- Przemysł 4.0 i inteligentna produkcja: Sieciowanie i digitalizacja produkcji wymagają inteligentnych i elastycznych robotów jako centralnych komponentów.
- Rozwój nowych sektorów: Wzrost jest w coraz większym stopniu napędzany wejściem do branż spoza sektora motoryzacyjnego, takich jak logistyka, budownictwo i energia odnawialna.
- Zrównoważony rozwój i reshoring: Roboty zwiększają efektywność wykorzystania materiałów, redukują ilość odpadów i umożliwiają opłacalną produkcję we własnym kraju.
Przeszkody:
- Wysokie początkowe nakłady inwestycyjne: Koszty robota, jego integracji i niezbędnych urządzeń peryferyjnych stanowią poważną przeszkodę, zwłaszcza dla małych i średnich przedsiębiorstw (MŚP).
- Złożoność integracji: Mimo bardziej przyjaznych dla użytkownika interfejsów, integrowanie robotów z istniejącymi systemami starszej generacji i zapewnienie interoperacyjności może nadal stanowić wyzwanie.
Strategiczne wymogi wdrożenia
Dla firm rozważających wykorzystanie robotów ciężkich, kluczowe znaczenie mają następujące kwestie strategiczne:
- Przeniesienie punktu ciężkości z nakładów inwestycyjnych (Capex) na całkowity koszt posiadania (TCO) i zwrot z inwestycji (ROI): Decyzje inwestycyjne nie powinny opierać się wyłącznie na cenie zakupu. Niezbędna jest kompleksowa analiza całkowitego kosztu posiadania (TCO) – obejmującego zużycie energii, konserwację i dostępność – a także zwrotu z inwestycji (ROI) – wynikającego z wyższej przepustowości, lepszej jakości i niższych kosztów pracy.
- Wykorzystanie nowych modeli biznesowych: Modele takie jak Robotics-as-a-Service (RaaS) obniżają początkową barierę inwestycyjną, umożliwiając firmom wynajmowanie możliwości robotów w formie kosztu operacyjnego, zamiast dokonywania inwestycji kapitałowej.
- Inwestowanie w rozwój personelu: Uproszczenie programowania nie eliminuje potrzeby zatrudniania wykwalifikowanych pracowników. Zamiast tego przesuwa wymagane umiejętności z samego programowania kodu na zadania wyższego rzędu, takie jak optymalizacja procesów, monitorowanie systemów i konserwacja. Firmy muszą inwestować w dalsze szkolenia swoich pracowników, aby skutecznie zarządzać tymi inteligentnymi maszynami i współpracować z nimi.
- Priorytetowe traktowanie oprogramowania i ekosystemów: Przy wyborze robota kluczowymi kryteriami powinny być platforma programowa producenta, łatwość obsługi oraz szeroki zakres ekosystemu partnerskiego. Silny ekosystem zapewnia dostęp do wstępnie zintegrowanych rozwiązań i zabezpiecza inwestycję przed zmieniającymi się wymaganiami.
Jesteśmy tu dla Ciebie - Doradztwo - Planowanie - Wdrażanie - Zarządzanie Projektami
☑️ Wsparcie dla MŚP w zakresie strategii, doradztwa, planowania i wdrażania
☑️ Tworzenie lub reorganizacja strategii cyfrowej i digitalizacji
☑️ Rozszerzenie i optymalizacja procesów sprzedaży międzynarodowej
☑️ Globalne i cyfrowe platformy handlowe B2B
☑️ Rozwój pionierskiego biznesu

Konrad Wolfenstein
Chętnie będę pełnić rolę Twojego osobistego doradcy.
Możesz się ze mną skontaktować wypełniając formularz kontaktowy poniżej lub po prostu dzwoniąc pod numer +49 7348 4088 965 .
Nie mogę się doczekać naszego wspólnego projektu.
Napisz do mnie



Xpert.Digital - Konrad Wolfenstein
Xpert.Digital to centrum przemysłowe skupiające się na cyfryzacji, inżynierii mechanicznej, logistyce/intralogistyce i fotowoltaice.
Dzięki naszemu rozwiązaniu 360° Business Development wspieramy renomowane firmy od pozyskiwania nowych klientów po obsługę posprzedażową.
Nasze narzędzia cyfrowe obejmują analizę rynku, smarketing, automatyzację marketingu, tworzenie treści, PR, kampanie mailingowe, spersonalizowane media społecznościowe i pielęgnowanie potencjalnych klientów.
Więcej informacji znajdziesz na stronach: www.xpert.digital - www.xpert.solar - www.xpert.plus
Kontaktować się