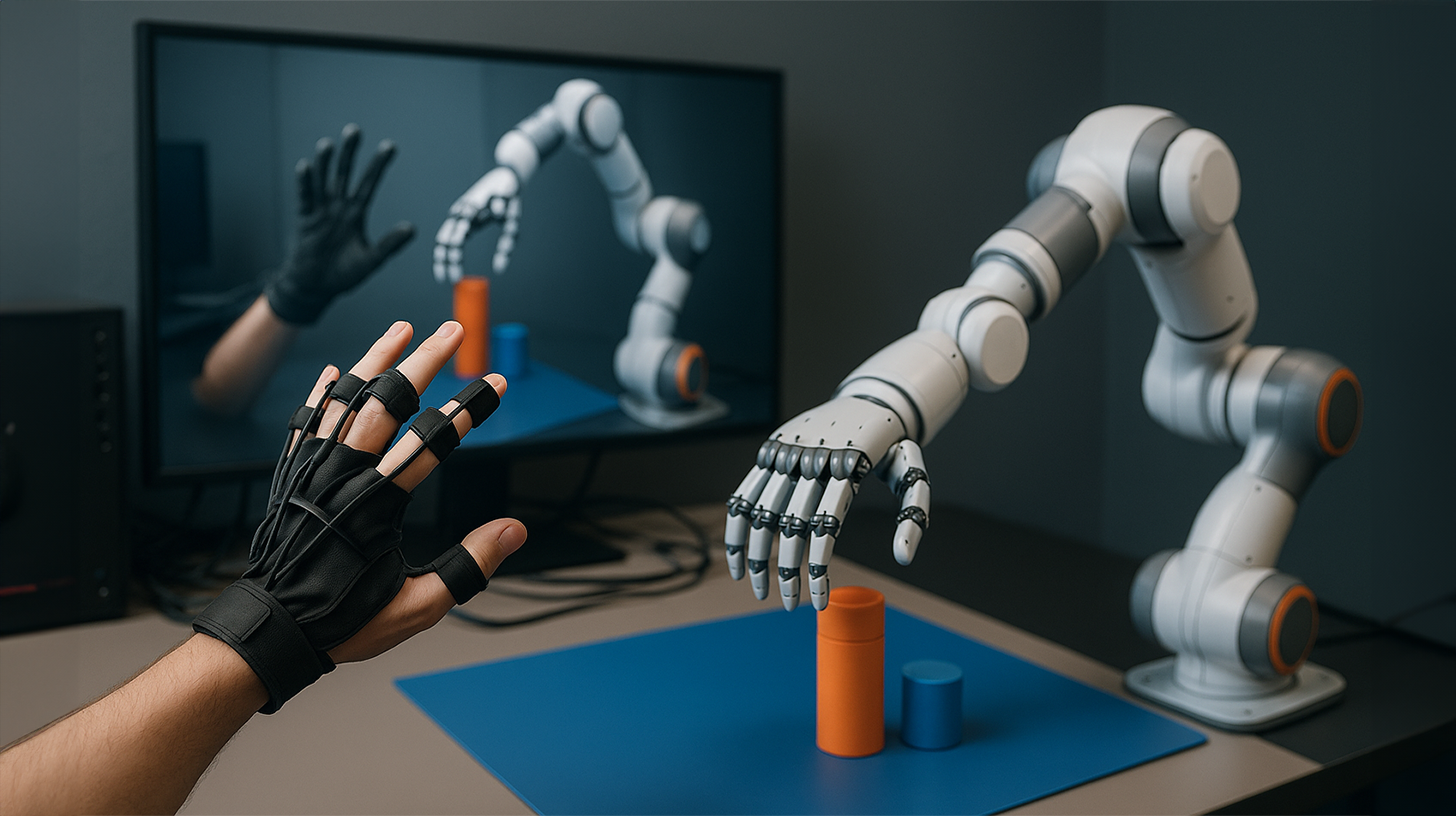
Teleoperatie van robots: Wanneer de menselijke hand de afstand overbrugt – Afbeelding: Xpert.Digital
Robots worden steeds slimmer, maar waarom hebben ze nog steeds menselijke hulp op afstand nodig?
Van Marsrovers tot diepzeemijnbouw: deze op afstand bestuurbare robots werken op plekken waar geen mens kan overleven
Stel je voor: een chirurg in Berlijn die een uiterst precieze operatie uitvoert op een patiënt in Tokio, zonder ooit een voet in de operatiekamer te zetten. Een robot verkent de diepte van de oceaan, terwijl de piloot veilig aan wal zit en elke beweging voelt alsof hij er zelf bij is. Wat klinkt als sciencefiction uit een ver verleden, is de fascinerende realiteit van teleoperatie – de technologie die mensen in staat stelt robots te besturen als een verlengstuk van hun eigen lichaam, zelfs over grote afstanden. In een tijdperk dat wordt gekenmerkt door kunstmatige intelligentie en autonomie, bewijst teleoperatie een fundamenteel principe: menselijke intuïtie, oordeelsvermogen en controle zijn onvervangbaar.
Maar telechirurgie is veel meer dan alleen een medisch wonder. Het is de onzichtbare kracht die het mogelijk maakt om rovers op Mars te besturen, grondstoffen te winnen uit ontoegankelijke mijnen of radioactief besmette rampgebieden te betreden. Deze uitgebreide analyse belicht niet alleen de indrukwekkende technologie achter deze revolutie. We duiken in de verrassende oorsprong ervan, die teruggaat tot de visionaire Nikola Tesla, analyseren cruciale uitdagingen zoals de gevreesde communicatievertraging die succes of mislukking bepaalt, en confronteren de diepgaande ethische vragen die verbonden zijn aan het op afstand besturen van levens en werk. Ga met ons mee op een reis die de grenzen tussen aanwezigheid en afwezigheid herdefinieert en onthult hoe de digitale duplicatie van de mensheid onze wereld voorgoed verandert.
De digitale duplicatie van mensen – Hoe teleoperatie grenzen overstijgt, de wetenschap vooruithelpt en conventies uitdaagt
De teleoperatie van robots vertegenwoordigt een van de meest fascinerende paradoxen van de moderne technologie: het stelt de menselijke operator in staat fysiek afwezig te zijn en tegelijkertijd met absolute aanwezigheid te handelen. Een chirurg in New York kan een operatie uitvoeren in Tokio. Een inspecteur blijft veilig terwijl zijn robotavatar afdaalt in radioactief besmette ruïnes. Een mijnbouwbedrijf exploiteert onderwatermijnen zonder ooit een voet in het water te zetten. Dit is geen sciencefiction, maar de huidige realiteit van een technologie die de klassieke grenzen tussen aanwezigheid en afwezigheid, tussen fysieke mogelijkheden en cognitieve controle, fundamenteel heeft verschoven.
In een wereld die gedomineerd wordt door automatisering, lijkt het paradoxaal dat teleoperatie – de directe menselijke besturing van machines op afstand – niet alleen overleeft, maar zelfs floreert. Deze constatering onthult echter een dieper inzicht in technologie: autonomie is waardevol, maar controle is essentieel. Teleoperatie is de ultieme belichaming van dit principe, een technologie die menselijke intelligentie, intuïtie en besluitvorming combineert met de pure fysieke kracht en ongevoeligheid van mechanische systemen. De markt voor teleoperatieve robotsystemen wordt geschat op ongeveer 890 miljoen dollar in 2025 en zal naar verwachting groeien tot meer dan 4 miljard dollar in 2032. Dit is niet alleen een teken van economische interesse, maar ook een bewijs van de fundamentele transformatie die deze technologie teweegbrengt in de moderne samenleving.
Historische oorsprong: Van Tesla's droom tot moderne realiteit
De geschiedenis van teleoperatie begint niet met computers, maar met een man wiens naam tegenwoordig vooral met elektriciteit wordt geassocieerd: Nikola Tesla. In de jaren 1890 voerde Tesla baanbrekende experimenten uit met draadloze afstandsbediening en ontdekte hij een fundamenteel principe dat ten grondslag ligt aan alle moderne teleoperatie. Tesla begreep dat radiogolven niet alleen informatie, maar ook commando's en besturing konden overbrengen. Zijn teleautomaton, een op afstand bestuurbare replica van een boot, demonstreerde in 1898 dat machines over grote afstanden als fysieke verlengstukken van de menselijke wil konden functioneren. Tesla ontving het Amerikaanse patent 613.809 voor deze uitvinding, een patent dat de intellectuele basis legde voor alle latere teleoperatiesystemen.
Toch bleven Tesla's visies decennialang grotendeels onverwezenlijkt. Pas na de Tweede Wereldoorlog bracht de praktische noodzaak de technologie verder. In 1945 ontwikkelde de Amerikaanse wetenschapper Raymond Goertz in de Argonne National Laboratories bij Chicago een master-slave telemanipulator voor het veilig hanteren van radioactief materiaal. Met dit apparaat konden werknemers achter een meterdikke betonnen muur zitten en radioactief materiaal door een raam manipuleren. Dit was de eerste praktische teleoperatierobot en markeerde de overgang van theoretische mogelijkheid naar industriële realiteit. Innovaties volgden elkaar in rap tempo op: elektrische servomotoren vervingen directe mechanische koppelingen, terwijl ingekapselde televisiesystemen en camera's operators in staat stelden hun werkpositie te kiezen en verschillende kijkhoeken te hebben.
In de jaren zestig verschoof de aandacht naar nieuwe gebieden: de ruimte en de diepzee. De marine van de VS, de Sovjet-Unie en Frankrijk raakte steeds meer geïnteresseerd in teleoperatoren, uitgerust met videocamera's gemonteerd op onderwatervoertuigen. De term "telerobot" ontstond in deze periode om ze te onderscheiden van traditionele teleoperatoren: telerobots beschikten over computersystemen die commando's konden ontvangen, opslaan en uitvoeren met behulp van sensoren en actuatoren. In de jaren zeventig brachten de onderzoekers Ferrell en Sheridan een revolutie teweeg in het veldwerk met het concept van "supervisiecontrole", waarbij de operator doelstellingen op hoog niveau communiceerde, die de computer vervolgens autonoom uitvoerde. Dit verminderde de werkdruk van de operator en de benodigde communicatiebandbreedte aanzienlijk.
Een andere mijlpaal was de ontwikkeling van voorspellende displays in de jaren 80, waardoor het mogelijk werd om een model van de robot op een computer te simuleren om vertragingen als gevolg van communicatievertraging te compenseren. Een hoogtepunt van deze ontwikkeling was de succesvolle demonstratie van de eerste telerobots in de ruimte aan boord van de NASA Space Shuttle door het Duitse Lucht- en Ruimtevaartcentrum (DLR) in 1993, met een communicatievertraging van 6 tot 7 seconden.
Chirurgische teleoperatie volgde een parallel pad. In de jaren negentig begonnen NASA's Ames Research Center en Stanford University met de ontwikkeling van het concept van telepresence in de chirurgie. Het AESOP-systeem van Computer Motion ontving in 1994 FDA-goedkeuring. In 2001 maakte het SOCRATES-systeem (eveneens van Computer Motion) wereldwijde samenwerking mogelijk door een chirurg in staat te stellen een robot te besturen vanaf een externe bedieningsconsole, terwijl hij realtime videobeelden van het operatiegebied en audiocommunicatie ontving. Deze ontwikkelingen legden de basis voor de moderne da Vinci-systemen die tegenwoordig het vakgebied domineren.
Architectuur en mechanismen: De technologische basisstructuur van teleoperatie
Een teleoperatiesysteem is niet zomaar een robot met een afstandsbediening. Het is een zeer complex samenspel van hardwarecomponenten, softwaresystemen en communicatieprotocollen die samen een naadloze uitbreiding van de menselijke wil creëren, zowel in ruimte als potentieel in tijd.
In de kern bestaan teleoperatiesystemen uit drie fundamentele elementen: het masterapparaat (ook wel het controlecentrum genoemd), het slaveapparaat of de robot op afstand, en het communicatiekanaal dat ze verbindt. Het masterapparaat is de interface tussen mens en machine. Dit kan een traditioneel bedieningspaneel zijn met joysticks en schakelaars, een virtual reality-headset met handtracking, een exoskelet dat de bewegingen van de operator registreert, of zelfs een brein-computerinterface die de hersenactiviteit van de operator interpreteert. Moderne AR-systemen gebruiken de HoloLens 2-headset voor realtime omgevingsdetectie, -verwerking en virtuele bediening.
De robot zelf is het ondergeschikte apparaat. Hij beschikt over actuatoren die de commando's van de master omzetten in fysieke bewegingen, en over sensoren die informatie over zijn omgeving verzamelen. Deze sensoren omvatten doorgaans camera's voor visuele feedback, afstandssensoren voor het vermijden van obstakels, kracht- en koppelsensoren en gespecialiseerde sensoren voor specifieke toepassingen, zoals thermometers voor inspecties of medische instrumenten voor operaties.
Het communicatiekanaal is het meest cruciale element en tegelijkertijd de achilleshiel van moderne teleoperatiesystemen. Bij lokale toepassingen kan dit een directe bekabelde verbinding zijn, waarbij de communicatievertraging in milliseconden wordt gemeten. Voor operaties over grotere afstanden, zoals bij ruimtemissies of onder water, kunnen glasvezelkabels, radioverbindingen of zelfs satellietverbindingen worden gebruikt, wat resulteert in aanzienlijk langere vertragingen. Het communicatieve feedbacksysteem is cruciaal: de operator moet niet alleen zien wat de robot ziet, maar ook voelen wat de robot voelt. Deze haptische feedback, die de sensatie van weerstand, textuur en kracht overbrengt, is met name belangrijk voor complexe taken zoals chirurgie of het manipuleren van fragiele objecten.
De technologische implementatie omvat verschillende lagen van besturingsarchitectuur. De eenvoudigste vorm is directe teleoperatie: elke beweging van de operator wordt direct vertaald in een overeenkomstige robotbeweging. Een meer geavanceerde vorm is begeleide teleoperatie, waarbij de operator doelstellingen op hoog niveau definieert en de robot, met behulp van lokale sensoren en computerbesturing, autonoom de paden en uitvoeringsdetails bepaalt. Nog complexer is geassisteerde teleoperatie, waarbij kunstmatige intelligentie de intenties van de operator voorspelt en passieve of actieve ondersteuning biedt.
De kinematica en dynamica van beide systemen – het exoskelet voor de menselijke arm en het robotsysteem voor het richten – moeten zorgvuldig worden gemodelleerd om een effectieve bidirectionele, continue en niet-lineaire mapping tussen de bewegings- en krachtruimte te creëren. Dit is met name belangrijk voor op exoskeletten gebaseerde systemen waarbij de gebruiker fysiek contact heeft met de hardware op afstand.
Een ander cruciaal technisch element is de integratie van augmented reality en virtuele omgevingen in de bedieningsinterface. AR-systemen stellen operators niet alleen in staat om het actuele beeld van de externe locatie te zien, maar ook om virtuele overlays te ontvangen van planningsgegevens, sensorinformatie en realtime waarschuwingen. Virtuele-realitysystemen die worden gebruikt bij complexe onderwatermijnenopruimingsoperaties creëren digitale 3D-replica's van de externe omgeving, waardoor operators hun acties vooraf kunnen plannen en optimaliseren.
De rol van 5G en edge computing in moderne teleoperatiesystemen kan niet genoeg benadrukt worden. 5G maakt ultralage latentie en een hogere bandbreedte mogelijk, wat cruciaal is voor realtime besturing en feedback. Edge computing, dat gegevensverwerking dichter bij de operationele locatie uitvoert, vermindert de netwerkbelasting en maakt complexere taken op afstand mogelijk.
🎯🎯🎯 Profiteer van de uitgebreide, vijfvoudige expertise van Xpert.Digital in één compleet servicepakket | Business Development, R&D, XR, PR & Optimalisatie van digitale zichtbaarheid


Profiteer van de uitgebreide, vijfvoudige expertise van Xpert.Digital in een compleet servicepakket | R&D, XR, PR & Optimalisatie van digitale zichtbaarheid - Afbeelding: Xpert.Digital
Xpert.Digital beschikt over diepgaande kennis van diverse sectoren. Hierdoor kunnen we strategieën op maat ontwikkelen die precies aansluiten op de behoeften en uitdagingen van uw specifieke marktsegment. Door continu markttrends te analyseren en ontwikkelingen in de sector te volgen, kunnen we proactief handelen en innovatieve oplossingen bieden. De combinatie van ervaring en expertise genereert toegevoegde waarde en geeft onze klanten een doorslaggevend concurrentievoordeel.
Meer informatie vindt u hier:
Teleoperatie: Hoe robots op afstand geneeskunde, de oceaan en Mars met elkaar verbinden
Actuele toepassingen: Waar teleoperatie de wereld vandaag de dag verandert
Moderne teleoperatietechnologie heeft zich ver buiten het oorspronkelijke domein van kernenergie en ruimtevaart verspreid. Het is de infrastructuur geworden waarop cruciale toepassingen in de geneeskunde, industrie, rampenbestrijding en daarbuiten zijn gebouwd.
De bekendste toepassing is wellicht teleoperatieve chirurgie. Het da Vinci-chirurgiesysteem van Intuitive Surgical is de industriestandaard geworden. Wereldwijd zijn er al meer dan 12 miljoen teleoperaties uitgevoerd en heeft het systeem meer dan 60.000 chirurgen opgeleid. Alleen al in 2023 werden er meer dan 2,2 miljoen operaties uitgevoerd met da Vinci-platforms, en de verwachting is dat dit aantal tegen eind 2024 de 2,5 miljoen zal overschrijden. Het systeem beschikt over een console van waaruit de chirurg werkt met een 3D-weergave van het operatiegebied, terwijl op afstand bestuurbare robotarmen instrumenten met micrometerprecisie geleiden. De voordelen zijn aanzienlijk: kleinere incisies, minder bloedverlies, sneller herstel en minder fysieke belasting voor de chirurg.
Sinds 2024 zijn er ook nieuwe systemen op de markt gekomen, zoals de Hugo RAS van Medtronic, gebaseerd op DLR-MIRO-technologie. Deze bieden een kosteneffectiever alternatief dat teleoperatieve chirurgie toegankelijker kan maken voor kleinere ziekenhuizen.
Een ander cruciaal toepassingsgebied is ruimteverkenning. NASA's Perseverance Marsrover wordt op afstand bestuurd door operators op aarde, met een communicatievertraging van 5 tot 20 minuten (afhankelijk van de posities van de aarde en Mars). Dit vereist semi-autonoom gedrag van de rover, waarbij de operator commando's op hoog niveau geeft, maar de rover zelf lokale navigatiebeslissingen neemt. Deze combinatie van teleoperatie en autonomie zal in toekomstige missies naar andere hemellichamen nog belangrijker worden.
Onderwatertoepassingen zijn aanzienlijk uitgebreid. Het VAMOS-project (Viable Alternative Mine Operating System), gefinancierd door de Europese Unie, ontwikkelt een op afstand bestuurd onderwatermijnsysteem met 3D VR-interfaces met hoge resolutie voor de operator. De systemen zijn via glasvezelkabels met hoge bandbreedte verbonden met het controlecentrum aan de oppervlakte.
In de robotica voor rampenbestrijding is teleoperatie van essentieel belang geworden. De DARPA Robotics Challenge demonstreerde het gebruik van teleoperatierobots in complexe rampscenario's, zoals de Fukushima-crisis, waar robots taken uitvoerden in omgevingen die te gevaarlijk waren voor mensen. Moderne systemen maken gebruik van stereoscopische displays op het hoofd en realtime 3D-omgevingsdetectie om operators een diepgaand inzicht te geven in de omgeving op afstand.
Logistiek en de bezorging van de laatste kilometers zijn ook steeds populairdere toepassingen. Tijdens demonstraties van Ericsson in Barcelona kon een chauffeur een autonome elektrische vrachtwagen besturen op meer dan 2000 kilometer afstand in Zweden. Op afstand bestuurbare robots werden ook ingezet om medische benodigdheden te vervoeren in twee stadions in Californië die waren omgebouwd tot COVID-19-behandelcentra.
Huidige uitdagingen: Wanneer technologie de fysieke grenzen bereikt
Ondanks aanzienlijke vooruitgang blijft teleoperatie geconfronteerd worden met fundamentele uitdagingen die de grenzen van wat technologisch mogelijk is, blootleggen.
Het grootste probleem is de communicatievertraging, oftewel latentie. Hoewel lokale teleoperatiesystemen vertragingen van enkele milliseconden kunnen hebben, neemt deze dramatisch toe met de afstand. Voor een operatie op de maan zou de communicatievertraging ongeveer 2 seconden heen en terug bedragen, terwijl deze voor operaties op Mars tot wel 40 minuten kan oplopen. Onderzoek heeft aangetoond dat de prestaties van teleoperaties stabiel blijven tot ongeveer 300 milliseconden, maar daarna beginnen af te nemen, waarbij fouten in padvolging en botsingen na 300 milliseconden sterk toenemen. Chirurgen presteren zelfs slechter bij vertragingen van meer dan 250-300 milliseconden, wat grote gevolgen heeft voor operaties op afstand.
De oplossing, waarbij voorspellende displays al in de jaren negentig werden ontwikkeld, werkte, maar simuleerde de toekomstige toestand van het externe systeem op basis van de commando's van de operator. Deze technieken hebben beperkingen, met name in geval van onverwachte omgevingsveranderingen of wanneer de robot op afstand weerstand ondervindt.
Een tweede fundamenteel probleem is haptische communicatie. Het verzenden van kracht, koppel en tactiele feedback via netwerken vereist hoge pakketsnelheden en is gevoelig voor pakketverlies en jitter, wat de systeemstabiliteit in gevaar brengt en de gebruikerservaring verslechtert. Conventionele internetverbindingen zijn vaak ontoereikend voor deze eisen, waardoor gespecialiseerde communicatieprotocollen en besturingsalgoritmen nodig zijn.
Een derde probleem is het situationeel bewustzijn van de operator. Een robot met camera's op het lichaam biedt een beperkt perspectief in vergelijking met een persoon ter plaatse die actief zijn gezichtsveld kan scannen en ruimtelijk kan rondkijken. Dit is met name problematisch in complexe of dynamische omgevingen. Hoewel AR- en VR-oplossingen dit kunnen helpen verminderen, kunnen ze leiden tot cognitieve overbelasting als er te veel informatie tegelijk wordt gepresenteerd.
De bandbreedte voor data is een andere beperking. Het verzenden van video met hoge resolutie, 3D-scans van lidar of andere sensoren kan de beschikbare netwerkcapaciteit snel uitputten, vooral bij onderwater- of ruimtemissies waar de bandbreedte beperkt is.
Beveiliging is een ander cruciaal aspect. De bronnen van fouten zijn talrijk: netwerkstoringen, onverwachte fysieke interacties en onvoorspelbare omgevingsomstandigheden. In kritieke toepassingen zoals chirurgie of rampenbestrijding kunnen fouten fataal zijn. Daarom is er steeds meer literatuur over robuuste besturingssystemen die vertragingen, pakketverlies en andere onzekerheden aankunnen.
Ethische en maatschappelijke controverses: De schaduwzijde van afstandsbediening
Hoewel teleoperatie technisch indrukwekkend is, roept het belangrijke ethische, juridische en maatschappelijke vragen op die tot nu toe slechts gedeeltelijk zijn beantwoord.
Bij telechirurgie staan vragen over geïnformeerde toestemming en patiëntautonomie centraal. Taalbarrières, uiteenlopende culturele opvattingen over robotchirurgie en verschillen in de gezondheidszorginfrastructuur bemoeilijken het ethische toezicht aanzienlijk. Landen verschillen sterk in hun medische praktijken, aansprakelijkheidsregelingen en normen voor gegevensbescherming, wat resulteert in een gefragmenteerd juridisch landschap. Momenteel bestaat er geen universele regelgeving voor deze procedures.
De kwestie van aansprakelijkheid is bijzonder gevoelig. Als er tijdens een telechirurgische ingreep een technische fout optreedt, is het vaak onduidelijk wie daarvoor verantwoordelijk is: de chirurg, de zorginstelling of de technologieleverancier. Bij grensoverschrijdende telechirurgie wordt deze onduidelijkheid nog versterkt door de verschillende rechtsstelsels van de betrokken landen.
Gegevensbescherming en gegevensbeveiliging zijn eveneens belangrijke aandachtspunten. Bij telechirurgie worden gevoelige patiëntgegevens over de grens verzonden, waardoor ze kwetsbaar zijn voor mogelijke beveiligingslekken en ongeautoriseerde toegang. Naleving van wetgeving inzake gegevensbescherming, zoals de AVG in Europa of HIPAA in de VS, is cruciaal.
Een ander belangrijk aspect is de kwestie van gelijke toegang. Hoewel telechirurgie de potentie heeft om de kloof in de gezondheidszorg tussen plattelands- en stedelijke bevolkingsgroepen en tussen landen met hoge en lage inkomens te overbruggen, is de realiteit vaak minder bemoedigend. De dure robotsystemen en de benodigde infrastructuur zijn voor veel landen en instellingen onbetaalbaar.
Bij militaire toepassingen en rampenbestrijding bestaan er zorgen over mogelijk misbruik. Op afstand bestuurbare drones en robotsystemen kunnen worden ingezet voor verkenning, bewaking of zelfs offensieve operaties, wat vragen oproept over internationale regelgeving en ethisch gebruik.
Nog minder onderzocht, maar steeds zorgwekkender, is de impact op de werkgelegenheid. Omdat teleoperatie het mogelijk maakt dat één operator meerdere robots op afstand bestuurt of hooggekwalificeerd werk uitbesteedt, kunnen arbeidsmarkten in bepaalde sectoren aanzienlijk worden ontwricht. Banen zouden kunnen verschuiven van locaties met hoge lonen naar locaties met lage lonen.
Toekomstige trends: De volgende stap in afstandsbediening
De toekomst van teleoperatie zal worden gevormd door verschillende samenlopende trends die potentieel een grote impact kunnen hebben.
Kunstmatige intelligentie en machinaal leren worden steeds vaker geïntegreerd in teleoperatiesystemen, niet om menselijke controle te vervangen, maar om deze te verbeteren. AI kan helpen bij routeplanning, obstakels voorspellen of zelfs routinematige deeltaken automatiseren, waardoor de menselijke operator zich kan concentreren op besluitvorming op een hoger niveau. Voorspellende modellen kunnen het gedrag van robotsystemen voorspellen en communicatievertragingen compenseren.
Hersenen-computerinterfaces (BCI's) vertegenwoordigen een compleet nieuwe grens. Hoewel traditionele interfaces zoals joysticks of sensoren relatief intuïtief zijn, zou het besturen van robots via direct geregistreerde hersengolven de gebruikerservaring drastisch kunnen veranderen. Onderzoek heeft al systemen aangetoond die hersenactiviteit met een nauwkeurigheid van ongeveer 80% kunnen vertalen naar robotcommando's. Een dergelijk systeem zou bijzonder waardevol kunnen zijn in omgevingen waar werknemers beperkte fysieke mobiliteit hebben, zoals op bouwplaatsen, onder water of in de ruimte.
5G- en toekomstige 6G-netwerken zullen de basisinfrastructuur vormen voor wereldwijde teleoperatie. De ultralage latentie en hogere bandbreedte van deze netwerken zullen operaties op afstand mogelijk maken met ongekende precisie en reactiesnelheid.
Virtuele realiteit en augmented reality worden voortdurend verder ontwikkeld om meer meeslepende en intuïtieve bedieningsinterfaces te creëren. Operators zullen steeds vaker virtueel "in" de externe locatie kunnen stappen en hun natuurlijke ruimtelijk inzicht gebruiken om de robot te besturen.
Een andere belangrijke trend is de integratie van zwermrobotica, waarbij meerdere robots samenwerken. Teleoperatie van een robotzwerm brengt unieke uitdagingen met zich mee, maar biedt ook mogelijkheden voor aanzienlijk verbeterde capaciteiten bij rampenbestrijding en verkenning.
De voortdurende daling van de kosten van robotica-hardware en -software zal teleoperatie toegankelijk maken voor een breder scala aan toepassingen en organisaties. Het Hugo-systeem biedt bijvoorbeeld een kosteneffectiever alternatief voor da Vinci.
Een andere veelbelovende trend is de combinatie van teleoperatie met autonome systemen. In plaats van volledige autonomie of volledige teleoperatie zouden hybride benaderingen de toekomst kunnen zijn, waarbij de robot autonoom eenvoudige taken of navigatie uitvoert, terwijl complexe beslissingen of onverwachte situaties worden doorverwezen naar een menselijke operator.
Tot slot neemt de internationale samenwerking op het gebied van teleoperatie toe. Het onderzoek naar internationale standaarden en beste praktijken zal toenemen, met name in sectoren zoals de geneeskunde, waar grensoverschrijdende samenwerking waarschijnlijk is.
De bepalende rol van teleoperatie in de toekomst van de beschaving
Teleoperatie is meer dan een technologisch trucje of een speciale oplossing voor grensgevallen. Het is een transformatieve technologie die de relatie tussen mens en machine, tussen lokale en mondiale aanwezigheid, en tussen risico en veiligheid fundamenteel verandert.
De technologie vindt zijn oorsprong in een simpele waarheid: er zijn banen die mensen niet kunnen uitvoeren omdat ze te gevaarlijk, te afgelegen, te nauwkeurig of te fysiek zwaar zijn. Teleoperatie lost dit probleem op door middel van abstractie. Het abstraheert de locatie van de handeling van de werkelijke locatie. Een operator in New York kan een robot in een besmette kernramp besturen met dezelfde veiligheid en controle alsof hij zich in een controlekamer bevindt.
De huidige toepassingen van teleoperatie in de chirurgie, ruimtevaart, onderwateroperaties en rampenbestrijding tonen de grote relevantie van deze technologie aan. Elk van deze gebieden bewijst dat teleoperatie niet alleen werkt, maar vaak de enige praktische oplossing is voor cruciale problemen.
De uitdagingen, met name de communicatievertraging en haptische feedback, zijn niet onoverkomelijk. Ze vereisen echter wel continue innovatie in communicatienetwerken, besturingsalgoritmen en gebruikersinterfaces. 5G en toekomstige netwerken zullen veel van deze uitdagingen verlichten.
De ethische bezwaren zijn niet minder reëel, maar ze zijn ook niet uniek voor teleoperatie. Het zijn variaties op universele vragen over technologie, toegang, verantwoordelijkheid en rechtvaardigheid. Doordachte regelgeving, internationale standaarden en een openbaar debat zullen noodzakelijk zijn.
In de toekomst zal teleoperatie waarschijnlijk niet volledig worden vervangen door autonomie, maar er eerder mee worden samengevoegd. Hybride systemen, waarin robots autonome mogelijkheden hebben maar menselijke operators inschakelen voor kritieke taken of afwijkingen, zouden wel eens de dominante architectuur kunnen worden.
Wat is de uiteindelijke conclusie? Teleoperatie is de belichaming van een fundamentele menselijke eigenschap: het vermogen om onze mogelijkheden uit te breiden tot voorbij de beperkingen van ons fysieke lichaam. Het is geen vervanging voor menselijkheid, maar een uitbreiding ervan. In een tijdperk van snelle automatisering en kunstmatige intelligentie blijft teleoperatie een bewijs van de blijvende relevantie en waarde van menselijke intelligentie, oordeelsvermogen en controle. Het zal geen nichegebied blijven, maar een steeds zichtbaarder en crucialer onderdeel worden van de moderne technologische infrastructuur. De markt zal groeien, de technologie zal verbeteren en de samenleving zal leren de kansen te benutten en de risico's te beheersen.
Uw wereldwijde partner voor marketing en bedrijfsontwikkeling
☑️ Onze zakelijke voertaal is Engels of Duits
☑️ NIEUW: Correspondentie in uw moedertaal!

Konrad Wolfenstein
Mijn team en ik staan graag tot uw beschikking als uw persoonlijke adviseur.
U kunt contact met mij opnemen door hier het contactformulier in te vullen door mij te bellen op +49 7348 4088 965. Mijn e-mailadres is wolfenstein@xpert.digital:of
Ik kijk uit naar ons gezamenlijke project.
☑️ Ondersteuning van het MKB op het gebied van strategie, advies, planning en implementatie
☑️ Opstellen of herzien van de digitale strategie en digitalisering
☑️ Uitbreiding en optimalisatie van internationale verkoopprocessen
☑️ Wereldwijde en digitale B2B-handelsplatformen
☑️ Pionier in bedrijfsontwikkeling / marketing / PR / beurzen
Onze wereldwijde expertise in de industrie en de economie op het gebied van bedrijfsontwikkeling, verkoop en marketing

Onze wereldwijde expertise in de industrie en economie op het gebied van bedrijfsontwikkeling, verkoop en marketing - Afbeelding: Xpert.Digital
Focusgebieden binnen de industrie: B2B, digitalisering (van AI tot XR), werktuigbouwkunde, logistiek, hernieuwbare energie en industrie
Meer informatie vindt u hier:
Een thematisch kenniscentrum met inzichten en expertise:
- Kennisplatform over mondiale en regionale economieën, innovatie en trends in specifieke sectoren
- Een verzameling analyses, inzichten en achtergrondinformatie over onze belangrijkste aandachtsgebieden
- Een plek voor expertise en informatie over actuele ontwikkelingen in het bedrijfsleven en de technologie
- Een informatiecentrum voor bedrijven die op zoek zijn naar informatie over markten, digitalisering en innovaties in de sector