Tactiele robotica: Robots met tastzin: De nieuwe generatie uit onderzoek van Vulcan en MIT naar haptische objectherkenning – Afbeelding: Xpert.Digital
Het objectherkenningssysteem van MIT zonder speciale sensoren en de Vulcan-robot van Amazon
Haptische waarneming voor machines: nieuwe normen in objectherkenning
In de robotica is de ontwikkeling van tactiele sensoren en herkenningssystemen een cruciale doorbraak. Machines kunnen hierdoor voor het eerst niet alleen hun omgeving zien, maar deze ook 'voelen'. Voorbeelden hiervan zijn de nieuwe Vulcan-robot van Amazon en het innovatieve objectherkenningssysteem van MIT. Beide technologieën breiden de toepassingsmogelijkheden van robots aanzienlijk uit en maken taken mogelijk die voorheen alleen door mensen met hun natuurlijke tastzin konden worden uitgevoerd.
Dit is hiermee gerelateerd:


Amazons Vulcan-robot: een doorbraak op het gebied van tactiele robotgrijptechnologie
Functionele en technologische fundamenten
De Vulcan-robot, ontwikkeld door Amazon, vertegenwoordigt een belangrijke technologische vooruitgang op het gebied van fysieke kunstmatige intelligentie. Amazon zelf omschrijft de ontwikkeling als een "doorbraak in robotica en fysieke AI". Het systeem bestaat uit twee hoofdcomponenten: "Stow" voor het opbergen van objecten en "Pick" voor het ophalen ervan. Een opvallend kenmerk is het vermogen om de omgeving tactiel waar te nemen.
De technologische basis voor Vulcans tactiele mogelijkheden bestaat uit speciale kracht-koppelsensoren, in de vorm van een ijshockeypuck, waarmee de robot kan "voelen" hoeveel kracht hij kan uitoefenen om een object vast te pakken zonder het te beschadigen. Adam Parness, directeur Robotics AI bij Amazon, benadrukt het unieke van deze aanpak: "Vulcan is niet onze eerste robot die objecten kan verplaatsen. Maar met zijn tastzin – zijn vermogen om te begrijpen wanneer en hoe hij in contact komt met een object – opent hij nieuwe mogelijkheden voor het optimaliseren van werkprocessen en faciliteiten.".
Om artikelen op de schappen te sorteren, gebruikt Vulcan een hulpmiddel dat lijkt op een liniaal die aan een stijltang is bevestigd. Met deze "liniaal" duwt hij andere artikelen opzij om ruimte te maken voor nieuwe. De grijparmen passen hun grijpkracht aan de grootte en vorm van het artikel aan, terwijl geïntegreerde transportbanden het artikel in de container duwen. Om artikelen eruit te halen, gebruikt Vulcan een zuiggrijper in combinatie met een camerasysteem.
Huidige toepassingsgebieden en prestaties
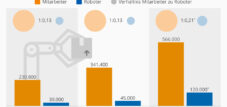
De Vulcan-robot wordt momenteel getest in twee logistieke centra van Amazon: in Winsen bij Hamburg (Duitsland) en in Spokane, Washington (VS). In Washington zijn zes Stow Vulcan-robots in gebruik die al een half miljoen artikelen succesvol hebben opgeslagen. In Winsen werken twee Pick Vulcan-robots die al 50.000 bestellingen hebben verwerkt.
De mogelijkheden van het systeem zijn opmerkelijk: Vulcan kan momenteel ongeveer 75 procent van de miljoenen producten die Amazon aanbiedt verwerken. Het kleinste object dat de robot kan manipuleren is ongeveer zo groot als een lippenstift of een usb-stick. Bijzonder indrukwekkend is het vermogen van de robot om objecten in realtime te identificeren, aangezien het "onmogelijk zou zijn voor de robot om alle details van de artikelen uit het hoofd te kennen", zoals Parness uitlegt.
Toekomstplannen en integratie in de logistieke keten
Amazon is van plan het aantal Vulcan-robots de komende jaren aanzienlijk te verhogen. Dit jaar zal het aantal Vulcans in Winsen naar verwachting stijgen tot 60 en in Washington tot 50. Het langetermijnplan is om de robots in te zetten in logistieke centra in heel Europa en de VS.
Een belangrijk aspect van Amazons strategie is de samenwerking tussen mens en machine. Het 'masterplan' van het bedrijf voorziet in een situatie waarin mens en machine zij aan zij werken. De robots zijn voornamelijk bedoeld voor het hanteren van producten in de schappen die mensen zonder ladder niet kunnen bereiken of waarvoor ze zich flink moeten bukken. Dit zal naar verwachting leiden tot een hogere algehele efficiëntie en tegelijkertijd de werkdruk voor de medewerkers verlagen.
MIT's objectdetectiesysteem door middel van manipulatie: intelligente "waarneming" zonder speciale sensoren
Innovatieve benadering van objectherkenning
Parallel aan Amazons Vulcan hebben onderzoekers van MIT, Amazon Robotics en de University of British Columbia een systeem ontwikkeld dat robots op een andere manier haptische vaardigheden geeft. Deze technologie stelt robots in staat om eigenschappen van een object te herkennen, zoals gewicht, zachtheid of inhoud, simpelweg door het op te pakken en zachtjes te schudden – net zoals mensen doen bij het hanteren van onbekende objecten.
Het bijzondere aan deze aanpak is dat er geen speciale tastsensoren nodig zijn. In plaats daarvan gebruikt het systeem de gewrichtsencoders die al in de meeste robots aanwezig zijn – sensoren die de rotatiepositie en -snelheid van de gewrichten tijdens beweging detecteren. Peter Yichen Chen, postdoc aan MIT en hoofdauteur van het onderzoekspaper, legt de visie achter het project uit: "Mijn droom is om robots de wereld in te sturen zodat ze dingen kunnen aanraken en verplaatsen en zelfstandig de eigenschappen van alles waarmee ze in contact komen kunnen ontdekken.".
Technische functionaliteit en simulatiemodellen
De kern van het MIT-systeem bestaat uit twee simulatiemodellen: een model dat de robot en zijn bewegingen simuleert, en een model dat de dynamiek van het object nabootst. Chao Liu, eveneens een postdoc aan MIT, benadrukt het belang van deze digitale tweelingen: "Een nauwkeurige digitale replica van de echte wereld is essentieel voor het succes van onze methode.".
Het systeem maakt gebruik van een techniek genaamd "differentieerbare simulatie", waarmee het algoritme kan voorspellen hoe kleine veranderingen in de eigenschappen van een object, zoals massa of zachtheid, de uiteindelijke positie van de gewrichten van de robot zullen beïnvloeden. Zodra de simulatie overeenkomt met de werkelijke bewegingen van de robot, heeft het systeem de juiste eigenschappen van het object geïdentificeerd.
Een belangrijk voordeel van deze methode is de efficiëntie: het algoritme kan de berekeningen binnen enkele seconden uitvoeren en heeft alleen een realistische bewegingsroute van de robot nodig om te functioneren. Dit maakt het systeem bijzonder kosteneffectief en praktisch voor toepassingen in de praktijk.
Toepassingsmogelijkheden en voordelen
De ontwikkelde technologie zou met name nuttig kunnen zijn in toepassingen waar camera's minder effectief zijn, zoals het sorteren van objecten in een donkere kelder of het opruimen van puin in een gedeeltelijk ingestort gebouw na een aardbeving.
Omdat het algoritme, in tegenstelling tot sommige methoden die afhankelijk zijn van computervisie of externe sensoren, geen grote dataset nodig heeft voor training, is het minder gevoelig voor fouten in onbekende omgevingen of bij nieuwe objecten. Dit maakt het systeem bijzonder robuust en veelzijdig.
Het bredere onderzoekslandschap op het gebied van tactiele sensoren in de robotica
Fundamentele uitdagingen en huidige oplossingen
De ontwikkeling van robots met tastzin stelt onderzoekers voor fundamentele uitdagingen. Hoewel het menselijke tastvermogen extreem complex en genuanceerd is, moeten kunstmatige systemen dit met behulp van technologische middelen nabootsen. Ken Goldberg, roboticus aan de Universiteit van Californië, Berkeley, benadrukt de complexiteit van deze taak: "Het menselijke tastvermogen is ongelooflijk genuanceerd en complex, met een enorm dynamisch bereik. Hoewel robots snelle vooruitgang boeken, zou het me verbazen als we binnen vijf tot tien jaar tastsensoren op menselijk niveau zouden zien.".
Ondanks deze uitdagingen wordt er aanzienlijke vooruitgang geboekt in het onderzoek. Zo ontwikkelt het Fraunhofer IFF bijvoorbeeld tactiele sensorsystemen die reactief grijpen mogelijk maken, de menselijke hand nabootsend, en ideaal zijn voor het hanteren van fragiele of flexibele objecten. De sensorgegevens worden gebruikt voor het aanpassen van de grijper, het herkennen van componenten en posities, en het bewaken van processen.
Innovatieve onderzoeksprojecten op het gebied van tactiele robotica
Naast de ontwikkelingen van Amazon en MIT zijn er nog andere belangrijke onderzoeksprojecten op het gebied van tactiele robotsensoren:
Het Max Planck Instituut voor Intelligente Systemen heeft een haptische sensor ontwikkeld, genaamd Insight, die aanrakingen zeer gevoelig detecteert. Georg Martius, hoofd van een onderzoeksgroep aan het instituut, benadrukt de prestaties van de sensor: "Onze sensor presteert uitstekend dankzij het innovatieve mechanische ontwerp van de behuizing, het speciaal ontworpen beeldvormingssysteem aan de binnenkant, de automatische data-acquisitie en de modernste deep learning-methoden." De sensor is zo gevoelig dat hij zelfs zijn eigen oriëntatie ten opzichte van de zwaartekracht kan waarnemen.
Een ander interessant project is DensePhysNet, een systeem dat actief een reeks dynamische interacties uitvoert (bijvoorbeeld schuiven en botsen) en een diepgaand voorspellend model gebruikt op basis van visuele waarnemingen om dichte, pixel-gebaseerde representaties te leren die de fysieke eigenschappen van waargenomen objecten weerspiegelen. Experimenten in zowel simulatie- als reële omgevingen tonen aan dat de geleerde representaties rijke fysieke informatie bevatten en direct kunnen worden gebruikt om fysieke objecteigenschappen zoals wrijving en massa te decoderen.
Dit is hiermee gerelateerd:

Toekomstperspectieven voor tactiele robotsystemen
Integratie van multimodale sensorsystemen
De toekomst van tactiele robotica ligt in de integratie van verschillende zintuiglijke modaliteiten. Onderzoekers van MIT werken al aan het trainen van kunstmatige intelligentie om zintuigen zoals zicht en tastzin te combineren. Door te begrijpen hoe deze verschillende zintuiglijke modaliteiten op elkaar inwerken, kunnen robots een meer holistisch begrip van hun omgeving ontwikkelen.
Het MIT-team is al van plan hun objectdetectiemethode te combineren met computervisie om een nog krachtiger multimodaal sensorsysteem te creëren. "Dit werk is niet bedoeld om computervisie te vervangen. Beide methoden hebben hun voor- en nadelen. Maar we hebben hier aangetoond dat we sommige van deze eigenschappen al kunnen identificeren, zelfs zonder camera", legt Chen uit.
Uitgebreidere toepassingsgebieden en toekomstige ontwikkelingen
Het onderzoeksteam van MIT wil ook toepassingen verkennen met complexere robotsystemen, zoals softrobots, en complexere objecten, waaronder klotsende vloeistoffen of korrelige materialen zoals zand. Op de lange termijn hopen ze deze techniek te gebruiken om het leervermogen van robots te verbeteren, waardoor toekomstige robots snel nieuwe manipulatievaardigheden kunnen ontwikkelen en zich kunnen aanpassen aan veranderingen in hun omgeving.
Amazon is van plan om de Vulcan-technologie de komende jaren verder te ontwikkelen en op grotere schaal in te zetten. De integratie van Vulcan met de bestaande vloot van 750.000 mobiele robots van het bedrijf duidt op een alomvattend automatiseringsconcept dat de logistieke sector fundamenteel zou kunnen veranderen.
Tactiel leren: Wanneer sensoren robots een tastzin geven
De ontwikkeling van robots met tastzin, zoals Amazons Vulcan en het objectherkenningssysteem van MIT, markeert een cruciaal keerpunt in de robotica. Deze technologieën stellen robots in staat taken uit te voeren die voorheen uitsluitend door mensen werden gedaan, omdat ze fijne motoriek en tastzin vereisen.
De verschillende benaderingen – Amazons focus op gespecialiseerde sensoren en MIT's concept om bestaande sensoren te gebruiken voor haptische inferentie – tonen de diversiteit aan onderzoeksrichtingen in dit vakgebied aan. Beide benaderingen hebben hun specifieke sterke punten en toepassingsgebieden.
Door de toenemende integratie van tactiele mogelijkheden in robotsystemen ontstaan nieuwe kansen voor de automatisering van complexe taken in de logistiek, productie, gezondheidszorg en vele andere sectoren. Het vermogen van robots om niet alleen te zien, maar ook hun omgeving te 'voelen' brengt ons een belangrijke stap dichter bij een toekomst waarin robots en mensen nog nauwer en intuïtiever kunnen samenwerken.
Dit is hiermee gerelateerd: