機械工学における重機ロボットの静かな革命:AIが最強のロボットの決定要因となった理由 – クリエイティブイメージXpert.Digital
これまで以上に強力になり、さらに賢くなった。これが新しいスーパーロボットの本当の力だ。
### 工場の現場はもう忘れよう:巨大ロボットが建設現場や風力発電所を席巻中 ### もう檻は必要ない:何トンものロボットが人間の安全な仲間になる方法 ### 熟練労働者不足への解決策? 世界で最も過酷な仕事を担うロボットたち ### 巨人の激突:最高のロボットを作るのは力ではなくソフトウェア ###
強さの進化:高性能重作業ロボットの最新開発
大型ロボット分野は、単に積載量や到達範囲を拡大するだけにとどまらない、抜本的な変革期を迎えています。最新の開発は、知性、適応性、使いやすさ、そして新たなアプリケーションの開発を重視する包括的なアプローチへのパラダイムシフトを示しています。ソフトウェア、人工知能(AI)、そして高度なメカトロニクスが主要な価値創造の原動力となり、これらの強力なロボットは、動的な環境下において、多くの場合、人間の作業員と直接協働しながら、複雑な作業に取り組むことが可能になっています。主要なトレンドとしては、従来の産業用ロボットと協働システム(コボット)の境界がますます曖昧になっていること、建設や再生可能エネルギーといった分野への進出、そして総所有コスト(TCO)と持続可能性の重要性の高まりなどが挙げられます。これらの開発は、より強力であるだけでなく、よりスマートで、より柔軟で、よりアクセスしやすい次世代の大型ロボットを定義しつつあります。.
新世代の重作業ロボット:パワーと精度を再定義
大型ロボット市場は、最大積載量を競う純粋な競争から、用途に応じた性能と効率性が重視される多様化へと進化しています。大手メーカーは、パワー、スピード、コンパクトさ、そしてインテリジェントな設計を組み合わせることで、自社製品を差別化しています。.
現代のヘビーデューティークラスの定義:単なるパワー以上のもの
重荷重ロボットは、通常250kg以上の荷重、または4メートル以上のリーチを必要とする荷重を扱うように設計されています。自動車製造、機械工学、鋳造、そしてますます増加している建設業など、産業の基盤を成し、エンジンブロック、鉄骨、車体全体といった巨大な部品を運搬します。可搬重量の範囲は非常に広く、数百kgから現在の最高2,300kgまでをカバーしています。.
しかしながら、現代の重作業ロボットの評価は進化を遂げています。最大可搬重量は依然として重要な基準ですが、総合的な効率指標がますます重視されるようになっています。これには、可搬重量比、必要な設置面積、エネルギー消費量、そして高い慣性モーメントを持つ荷物を正確かつ動的に取り扱う能力などが含まれます。これらの基準は、総所有コスト(TCO)と、現代の柔軟な生産環境の要件に対するより深い理解を反映しています。.
競争環境と主力モデル(2024~2026年)
市場はKUKA、ファナック、ABB、安川電機といった既存企業が優勢を占める一方、中国のEstunのような新興企業も存在感を増しています。これらの企業の戦略は、単に積載量を最大限に高めるだけにとどまらず、顕著な差異を示しています。.
ファナックは、M-2000iAシリーズにより、超重荷重分野における揺るぎないマーケットリーダーの地位を維持しています。可搬重量2.3トンのM-2000iA/2300モデルは、世界最強の6軸多関節ロボットであり、車両シャーシ全体の持ち上げなど、最大限の強度が求められる作業に最適です。.
KUKAは、パフォーマンスの最適化戦略を追求しています。KR FORTEC ultraシリーズは最大800kgの吊り上げ能力を備えながら、非常に優れた可搬重量比とコンパクトな設計が特徴です。これは、重量を過度に増加させることなく剛性を高めるダブルアームシステムなどの革新的な設計により実現されています。パレタイジング用途向けには、KR 1000 titanシリーズが最大1,300kgの吊り上げ能力を備えたモデルを提供しています。.
ABBは、主力製品であるIRB 8700を同クラス最速ロボットと位置付けています。最大800kg(手首を傾斜させた場合は1,000kg)の可搬重量を備え、同等のモデルと比較してサイクルタイムを25%高速化します。また、軸ごとにモーターとギアボックスを1つずつ搭載するシンプルな機械設計により、メンテナンスの負担を軽減し、総所有コスト(TCO)を削減することで、信頼性の高さも強調しています。.
安川電機は、600kgの可搬質量を誇るMotoman MH600をはじめ、幅広い製品ラインナップを提供しています。パラレルジョイント設計により高い安定性と剛性を確保し、特に慣性モーメントの大きいワークのハンドリングに威力を発揮します。GPシリーズは高速アプリケーション向けに設計されています。.
Estunや川崎重工といった新興競合企業も市場に参入している。中国最大の産業用ロボットメーカーであるEstunは、可搬重量1,000kgのER 13300などのモデルを欧州で発売する予定だ。川崎重工は、可搬重量710kgのMXP710Lと、最大1,500kgまで対応可能なMシリーズを投入し、製品ラインナップを拡充している。.
これらの異なるアプローチは、大型ロボット市場が、最大の可搬重量をめぐる一元的な競争から、より差別化された競争環境へと進化したことを示しています。メーカーは現在、最大出力、限られたスペースでの効率性、最高速度など、顧客の具体的な要件に合わせてカスタマイズされた特殊な性能特性に基づいて競争しています。これにより、ユーザーは単に最も強力なモデルを選ぶのではなく、個々の生産条件に最適化されたソリューションを選択できるようになります。.
ロボットの巨人:最強の産業用ロボットの比較
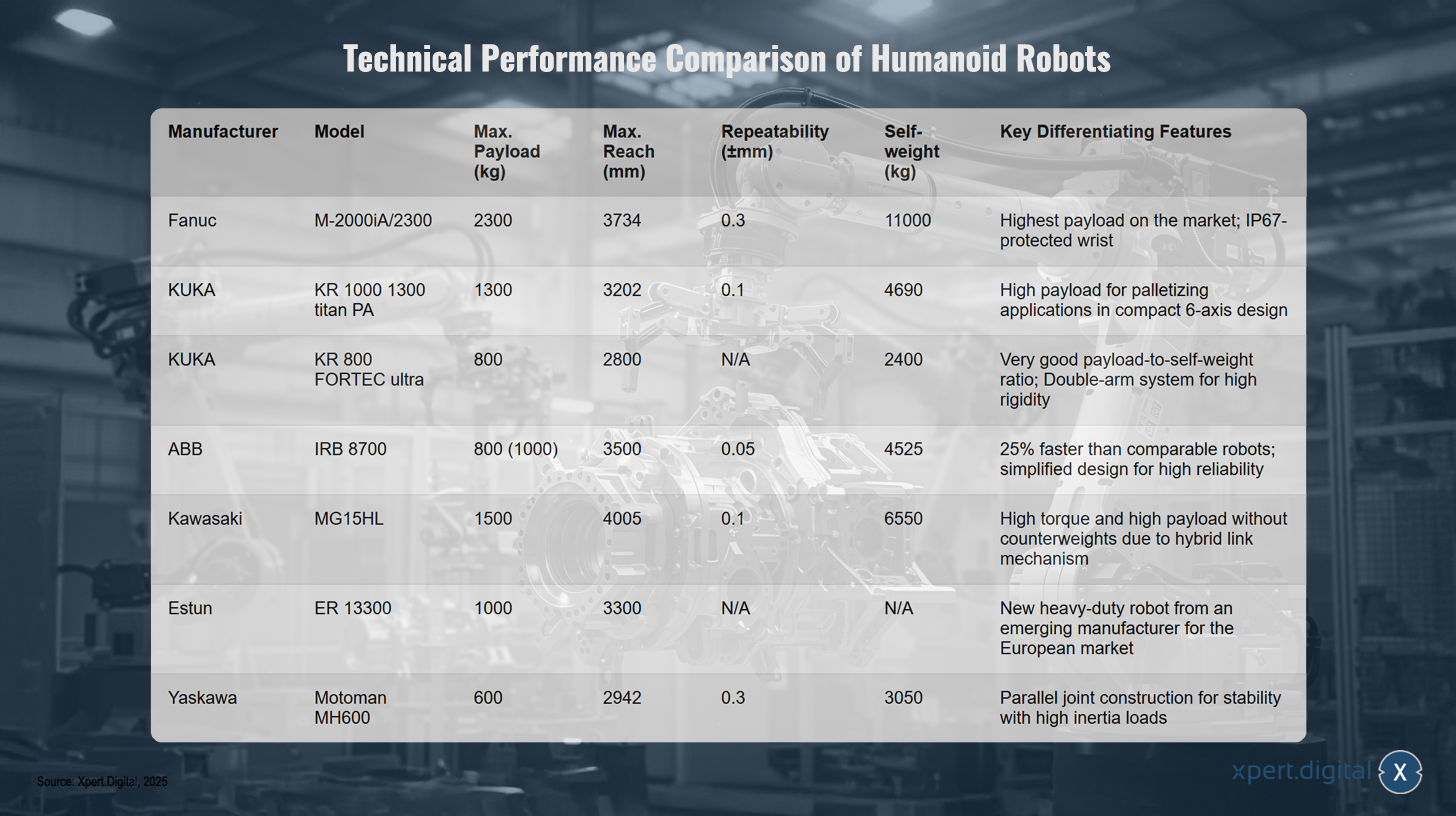
ロボットの巨人:最強の産業用ロボットの比較 – 画像:Xpert.Digital
産業用ロボットの世界には、その巨大な可搬容量と技術仕様で際立つ、印象的な巨大企業が存在します。ファナック、KUKA、ABB、川崎重工、エスタン、安川電機といったメーカーが、この市場セグメントでトップの座を競い合っています。.
Fanuc M-2000iA/2300は、2300kgという卓越した可搬重量とIP67保護等級の手首部を備えています。KUKAは、パレタイジング用途に最適な1300kgの可搬重量を備えたコンパクトな6軸設計のロボット、KR 1000 1300 titan PAを発表しました。ABB IRB 8700は、類似モデルと比較して25%高速な速度と、最大限の信頼性を実現するシンプルな設計で高い評価を得ています。.
川崎重工のMG15HLは、追加のカウンターウェイトなしで高いトルクと可搬重量を実現するハイブリッドリンク機構を採用しています。安川電機のMotoman MH600は、高慣性モーメントの負荷下でも安定性を保証する平行リンク設計が特徴です。.
注目すべき新製品として、欧州市場を席巻することを目指している重作業ロボット「Estun ER 13300」が挙げられます。これらのロボットは、産業オートメーションにおける技術の進歩と、大手メーカーの継続的なイノベーションを鮮やかに示しています。.
インテリジェンスエンジン:AIとソフトウェアが重要な差別化要素
重作業ロボットにおける最も重要な進歩は、もはや純粋に機械的な性質のものではありません。むしろ、ロボット工学と人工知能、そして高度なソフトウェアの融合こそが、これらの機械の能力を根本的に拡張し、その動作に革命をもたらしているのです。.
自動化から自律性へ:人工知能と機械学習の影響
AIと機械学習(ML)は、産業用ロボットを、固定された事前プログラム済みのツールから、認識、判断、学習が可能な適応型インテリジェントシステムへと変革しています。この変革は、現代の製造・物流プロセスにおける変動性と複雑性を管理する上で不可欠です。.
高度な知覚(「目」)
現代のロボットはもはや盲目的に行動するわけではありません。2Dおよび3Dビジョンシステム、LiDAR、ステレオカメラといった高度なセンサーシステムを搭載し、周囲の環境を包括的に理解します。この知覚能力は、物体認識、位置特定、セグメンテーションのためのディープラーニングアルゴリズムによって駆動されており、非構造化環境での使用を可能にしています。.
使用例 – ビンピッキング: KUKA.SmartBinPicking などのシステムは、高度な画像処理を使用して、コンテナ内にランダムに配置されたオブジェクトを識別し、その掴みポイントを決定して安全に除去します。これは、従来のルールベースのプログラミングでは事実上不可能なタスクです。.
ユースケース - 建設現場の検出:YOLO(You Only Look Once)ベースの物体認識モデルの開発研究が活発に行われています。これにより、ロボットは動的な建設現場における作業員、車両、建物構造物の識別が可能になり、複雑な環境下での自律動作の基本要件となります。.
インテリジェントなタスク処理(「脳」)
AIは見るだけでなく、行動にも役立ちます。MLモデルにより、ロボットは変化する状況にリアルタイムで適応して行動することができます。.
ユースケース – AIを活用したデパレタイジング:ファナックはAI制御のビジョンシステムを活用し、ロボットが様々なサイズや位置のカートンを混載したパレットを自律的にアンロードできるようにしています。このシステムは1分間に9個以上のカートンを処理できるため、非常に過酷な手作業を代替できます。.
ユースケース – AI支援溶接:NovAI™などの次世代システムは、マシンビジョンとAIを活用し、適応型リアルタイム溶接を実現します。溶接シームの追跡、ギャップ寸法や仮付け溶接への適応、溶接パラメータの動的補正などが可能です。これにより、部品公差のばらつきによりロボットによる制御が困難とされてきた工程を自動化し、造船などの重機建設業界における大きな進歩を実現します。.
使いやすさの革命:高度なソフトウェアで複雑さを簡素化
従来、産業用ロボットのプログラミングは、KRL(KUKA)やRAPID(ABB)といった独自のプログラミング言語に関する深い知識を必要とする高度に専門的な作業でした。そのため、参入障壁が高く、自動化ソリューションの導入が遅れていました。.
次世代オペレーティングシステム
大手メーカーは、ロボット操作を民主化するために設計された新しい直感的なオペレーティング システムを開発することで、このボトルネックに対応しています。.
KUKA iiQKA.OS:スマートフォンのように簡単に操作できるよう設計された、Webベースのユーザーインターフェース(iiQKA.UI)を備えた、最新のLinuxベースのオペレーティングシステムです。命令ベースのプログラミングをサポートし、仮想試運転を可能にするほか、サードパーティ製のアプリとハードウェアからなるエコシステム(「Robotic Republic」)の構築を目指しています。.
FANUC iHMI:「インテリジェント・ヒューマン・マシン・インターフェース」は、タッチスクリーンベースのグラフィカル・ユーザーインターフェースで、セットアップとトレーニング時間を大幅に短縮するように設計されています。サイクルタイムの見積もりや保守管理といった計画、編集、改善ツールを、ユーザーフレンドリーな単一のインターフェースに統合しています。.
プログラミングの民主化
トレンドは明らかにコードフリー、あるいはローコードへと移行しています。ドラッグ&ドロップ機能とグラフィカルなワークフローエディタを備えたビジュアルプログラミング環境が標準になりつつあります。オペレーターがロボットアームを手動で操作(マニュアルガイダンス)したり、Wandelbots Tracepenなどの外部ツールを使用してロボットにタスクを「デモンストレーション」したりする「ティーチング・バイ・デモンストレーション」方式は、プログラミングのハードルをさらに下げます。.
シミュレーションの力(デジタルツイン)
KUKA.SimやABB RobotStudioといったオフラインプログラミングおよびシミュレーションソフトウェアは、もはやなくてはならないツールとなっています。これらのソフトウェアにより、企業は物理的なハードウェアを発注する前に、ロボットセル全体を仮想的に設計、テスト、最適化することができます。この「バーチャルコミッショニング」により、実際のセットアップ時間が大幅に短縮され、衝突やアクセスの問題を早期に検出することでリスクを最小限に抑え、ハードウェアの調達と並行してプログラミングを行うことができます。.
これらの進展は、ロボティクスにおける根本的な変化を示唆しています。メーカーはもはやコントローラー付きのロボットアームを販売するだけでなく、完全なデジタルプラットフォームを構築しています。これらのプラットフォームには、オペレーティングシステム、アプリストア、パートナーネットワーク、クラウド接続が含まれます。KUKAは、サードパーティプロバイダー向けのオープンインターフェースを備えたiiQKAのパートナーエコシステム(「Robotic Republic」)を積極的に推進しています。同時に、Bosch RexrothのctrlX AUTOMATIONのようなプラットフォームは、統一されたインターフェースを介して、様々なブランド(ABB、KUKA、FANUC)のロボットを制御できるようにします。この進展は、デバイスの価値がアプリエコシステムによって大きく左右されるスマートフォン市場の変革を反映しています。したがって、競争環境は、純粋なハードウェア仕様から、ソフトウェアエコシステムの強力さとオープン性へと移行しています。ユーザーにとって、これは単一メーカーへの依存度の低減、イノベーションの加速、そしてより幅広い専用ソリューションへのアクセスを意味します。ロボットは、ソフトウェア定義の自動化ソリューションが構築されるハードウェアプラットフォームとなります。.
🎯🎯🎯 Xpert.Digitalの5つの専門知識を1つの包括的なサービスパッケージで活用しましょう | BD、R&D、XR、PR、デジタル可視性の最適化


Xpert.Digitalの5つの専門知識を包括的サービスパッケージで活用 | R&D、XR、PR、デジタル可視性の最適化 - 画像: Xpert.Digital
Xpert.Digitalは、様々な業界にわたる深い知識を有しています。これにより、お客様の特定の市場セグメントのニーズと課題に的確に合致した、カスタマイズされた戦略を策定することができます。市場トレンドを継続的に分析し、業界の動向をモニタリングすることで、先を見越した行動を取り、革新的なソリューションを提供することができます。経験と専門知識を組み合わせることで付加価値が生まれ、お客様に決定的な競争優位性を提供します。.
詳細はこちら:
新しいメカトロニクス:重作業ロボットが物理的限界をいかに打ち破るか
先進メカトロニクス:電力の物理的進化
ソフトウェアとAIの急速な進歩に伴い、大型ロボットの物理的形状も進化しています。この知能の向上を機械性能に反映させるには、設計、材料科学、エンドエフェクタ技術におけるイノベーションが不可欠です。.
デザインと素材の革新:より少ない質量でより高い性能
重要なトレンドの一つは、同等もしくはそれ以上の可搬重量を備えながら、より軽量でコンパクトなロボットの開発です。例えば、KUKA KR Fortecは前モデルより最大700kg軽量化され、KR FORTEC ultraシリーズはクラス最高の可搬重量比を誇ります。この軽量化により、基礎要件が緩和され、エネルギー消費が削減され、人員が密集したスペースが限られた生産施設への導入が可能になります。.
これは、高度な運動学コンセプトによって実現されています。KUKAの双腕システムとFanucの高剛性アーム設計により、高速・高荷重時の精度が向上し、振動が低減されます。Kawasakiのハイブリッドリンク機構により、かさばるカウンターウェイトが不要になり、ロボットの作業スペースが拡大します。.
もう一つの重要な側面はモジュール性です。KUKA(KR Quantec、Fortec、Fortec ultra)などのロボットシリーズでは、中央ハンドなどの共通コンポーネントの共有化が進んでいます。これにより、多様なロボット群を運用するお客様のメンテナンスが簡素化され、スペアパーツの在庫コストも削減されます。.
過酷な環境での使用を想定し、「鋳造用」や「衛生用」といった特殊な仕様が標準装備されています。これらのモデルは、IP67保護等級の手首部と本体、耐熱・耐腐食コーティング、食品グレードの潤滑剤を備えており、鋳造工場、鍛造工場、食品加工工場などでの使用が可能です。.
次世代エンドエフェクタ:ロボットの手
ロボットアームの先端に取り付けられるグリッパー(エンドエフェクタ)は、単純な空気圧クランプから複雑なメカトロニクスシステムへと進化を遂げています。適応機能を提供する高度なセンサーの搭載も増えています。依然として主に低荷重の用途で使用されていますが、ソフトロボティクスやバイオニクスの原理がグリッパー技術に影響を与えています。その目標は、より多様な形状や材質の物体を、より高い信頼性とより少ない力で取り扱うことです。重量物や複雑な物体については、精密な操作を可能にする多軸の完全駆動機構が開発されています。.
手首に取り付けられた力覚・トルクセンサーは、ロボットに「触覚」を与えます。これにより、部品の正確な接合、研削時の規定の力の適用、予期せぬ衝突への安全な対応といった繊細な作業が可能になります。.
センサーエコシステム:知覚と安全の基盤
現代の重作業ロボットは、豊富な内部および外部センサーのエコシステムに依存しています。モーターエンコーダーや関節部のトルクセンサーなどの内部センサーは、精密な動作制御に不可欠です。3Dカメラ、LiDAR、超音波センサーなどの外部センサーは、環境認識のためのデータを提供し、人とロボットの安全な協働を可能にします。統合された衝突・過負荷保護システムは、衝突や過負荷が発生した場合に緊急停止を作動させ、ロボットとワークピースの両方を保護します。これらのシステムはますます高度化しており、現在では空気圧で調整可能なトリガー閾値などの機能も提供しています。.
持続可能性と効率性:総所有コスト(TCO)に焦点を当てる
エネルギー効率は重要な設計目標となっています。軽量構造、ソフトウェア最適化された動作パス、省エネスタンバイモードなどにより、メーカーはロボットのエネルギー消費量を削減しています。これは運用コストの削減だけでなく、自動化ソリューションの環境負荷軽減にもつながります。ABBが追求しているような、軸ごとにモーターを1つだけ搭載する簡素化された機械設計やモジュール構造は、信頼性(平均故障間隔、MTBF)の向上と修理時間(平均修復時間、MTTR)の短縮につながり、全体的な運用コストをさらに削減します。.
メカトロニクスの進歩は、ソフトウェアとAIの発展と密接に絡み合っています。より剛性が高く、振動の少ないアーム構造(ハードウェアの改良)は、ロボットをより高速かつ正確に動作させるための高度なモーション制御ソフトウェア(ソフトウェアの改良)の前提条件です。AIベースの経路計画アルゴリズムは、まさにこの運動学において最もエネルギー効率の高い軌道を計算します。統合された力-トルクセンサーはリアルタイムのフィードバックを提供し、制御ソフトウェアは予期せぬ力に反応し、プロセスをより堅牢にします。このように、現代の大型ロボットの性能は、機械、センサー、ソフトウェアが密接に結びついたシステム全体の創発的な特性なのです。.
拡大する展望:大型ロボットの新たな応用分野
AI、ソフトウェア、メカトロニクスの技術進歩により、これまで手作業や固定的な自動化に依存していた産業でも、大型ロボットの活用が可能になっています。ロボットは管理された工場の現場を離れ、動的かつ非構造化された環境を征服しつつあります。.
自動化された建設現場
建設業界は、熟練労働者の不足、高い安全リスク、生産性向上へのプレッシャーの高まりなど、大きな課題に直面しています。その結果、建設会社の81%が今後10年以内にロボット導入を計画しています。.
用途:重荷重ロボットは、鋼材プロファイル、プレキャストコンクリート部材、モジュラー住宅ユニットなどの大型部品を取り扱います。大型部品の穴あけ、リベット打ち、締結など、自動化製造に使用されます。具体的な例としては、大規模な建設現場での穴あけやアンカー固定作業用に特別に開発されたFischer BauBotが挙げられます。ロボットには切削工具を装備することもでき、コンクリートや鋼材を現場で高精度に加工することができます。.
主要テクノロジー: この非構造化環境での成功は、材質や障害物を識別する AI ベースのオブジェクト認識と、堅牢なモバイル プラットフォームに大きく依存します。.
未来のエネルギー:再生可能エネルギー生産の自動化
再生可能エネルギーの大幅な拡大には、風力タービンブレードや太陽光発電所などの大型部品をより迅速かつコスト効率よく製造および設置することが必要です。.
風力エネルギー:風力タービンブレードの製造では、ロボットが後加工(トリミング、研磨、充填)に活用されており、品質向上と作業員の危険作業軽減に貢献しています。自動繊維配置(AFP)では、ロボットアームがカーボンファイバーまたはグラスファイバーのストリップを正確に配置することで、より軽量で強度の高いローターブレードを製造します。特殊なロボットシステムがブレード根元の加工(鋸引き、フライス加工、穴あけ)を行い、従来機と比較してサイクルタイムを最大50%短縮します。.
太陽エネルギー:Charge RoboticsやTerabaseといった企業は、太陽光発電所の建設現場で太陽光モジュールのセクション全体を自動で事前組み立て・設置する移動式「工場」を開発しており、生産性を2倍に高める可能性があります。AESの「Maximo」ロボットは、AI、LiDAR、マシンビジョンを活用し、太陽光パネルの重量物の持ち上げと組み立てを自動化し、時間とコストを最大50%削減します。ComauのHyperflexシステムは、セミトレーラーに搭載された移動式工場で、現場で太陽光トラッカーを直接組み立て・設置します。.
重工業の近代化:造船と航空宇宙
造船:伝統的に自動化が進んでいなかったこの業界では、移動型重作業ロボットの導入が始まっています。Comau社がフィンカンティエリ造船所と共同で開発したMR4Weldは、造船所の非構造化環境を移動しながら大型船体セクションの溶接作業を行う自律移動型溶接ロボットです。これにより、巨大な鉄骨構造物の組立に新たな柔軟性と効率性がもたらされます。.
航空宇宙: ここでは、最高の精度と再現性が求められる、翼や胴体部品などの大型航空機部品の穴あけ、リベット打ち、接合に高精度の大型ロボットが使用されます。.
循環型経済における役割
持続可能性の目標と EU 規制により、複雑な製品の効率的なリサイクルと再処理の必要性が高まっています。.
自動解体: 大型ロボットは、大型で重い製品の解体に最適です。.
電気自動車用バッテリー:重量が大きく、潜在的な危険性(電気的、化学的)があるため、ロボットによる電気自動車用バッテリーの解体は、安全かつ経済的なリサイクルにとって重要な要素です。研究プロジェクトでは、バッテリーモジュールとセルを自動的に分離するロボットセルの開発が進められています。.
大型電子機器とモーター:フラウンホーファー研究所は、AIとマシンビジョンを活用し、PC、洗濯機、電気モーターを自動分解し、銅や希土類磁石などの貴重な資源を回収するロボットシステムの開発に取り組んでいます。これは「都市鉱山」の実現に向けた重要な一歩です。.
これらの新たな応用分野には共通の特徴があります。それは、ロボットを工場現場という高度に構造化され予測可能な環境から、動的で非構造化、そしてしばしば過酷な「現場」へと移行させることです。この環境の変化は、AI、センサー技術、メカトロニクスにおける技術開発の主な原動力となっています。技術的な課題は、反復動作の最適化から不確実性の管理へと移行しています。将来の成功は、速度や精度の漸進的な向上よりも、環境認識、自律航行、適応型タスクプランニングにおけるブレークスルーに大きく依存するでしょう。.
当社のおすすめ: 🌍 無限のリーチ 🔗 つながり 🌐 多言語 💪 販売力: 💡 戦略に基づいた本物 🚀 革新と直感の融合


ローカルからグローバルへ:中小企業が巧みな戦略で世界市場を制覇 - 画像:Xpert.Digital
企業のデジタルプレゼンスが成功を左右する時代において、真にパーソナライズされ、広範囲に及ぶプレゼンスを構築することが課題となっています。Xpert.Digitalは、業界ハブ、ブログ、そしてブランドアンバサダーの交差点に位置する革新的なソリューションを提供します。コミュニケーションと販売チャネルの利点を単一のプラットフォームに統合し、18言語での配信を可能にします。パートナーポータルとの連携、Googleニュースへの記事掲載、そして約8,000人のジャーナリストと読者を擁するプレス配信リストにより、コンテンツのリーチと可視性を最大限に高めます。これは、外部セールス&マーケティング(SMarketing)において重要な要素となります。.
詳細はこちら:
成長、機会、障害:大型ロボットの戦略
協働の最前線:高荷重下での安全な人間とロボットの相互作用
一見矛盾しているように見える新たなトレンドとして、潜在的に致命的な力を発揮できるロボットに協調原理を適用するというものがあります。この開発により、重作業ロボットは孤立した機械から強力なチームメイトへと変貌を遂げつつあります。.
檻を超えて:コラボレーションのスペクトル
重作業ロボットを安全囲い内で操作するという従来の安全コンセプトは非効率であり、人間と機械の作業が厳密に分離されてしまいます。しかし、現代のヒューマン・ロボット・コラボレーション(HRC)は単一の概念ではなく、単純な共存(人がロボットの作業領域に入るとロボットが停止する)から密接な協働(人間とロボットが同時に同じワークピース上で作業する)まで、幅広い範囲を網羅しています。.
このアプローチの主な利点は、従来の軽量コボットとは異なり、協働型産業用ロボットは可搬重量、速度、精度に関する制限を受けないことです。そのため、産業用ロボットの性能と協働アプリケーションの柔軟性という、両方の長所を兼ね備えています。.
安全な大型MRKの主要技術
高度なセンサーとインテリジェントな制御機能を組み合わせることで、重作業ロボットとの安全な人間とロボットの協働が可能になります。.
高度な安全センサー:安全なヒューマン・ロボット・コラボレーション(HRC)の基盤は、人間の存在と意図を検知するシステム能力です。これは、安全認証を受けたレーザースキャナー、3Dカメラ、さらにはロボットの周囲に動的な多層保護フィールドを形成する圧力感知床によって実現されます。.
速度・距離監視(SSM):これは、ロボットの速度が人間との距離に反比例する重要な協働手法です。人が近づくとロボットは減速します。人が近づきすぎると、ロボットは安全に監視された状態で停止します。これにより、物理的な障壁のないスムーズで効率的なインタラクションが可能になります。.
パワー&フォースリミッティング(PFL):大型ロボットは慣性が大きいため、PFL制御は困難ですが、高度な制御システムと各関節に搭載されたトルクセンサーにより、大型ロボットでも特定のタスクにおいてフォースリミットモードで動作可能です。予期せぬ接触があった場合、ロボットは即座に停止します。この機能は、ハンドガイドや搬送タスクでよく使用されます。.
標準化とリスクアセスメント:安全なヒューマン・ロボット・コラボレーション(HRC)アプリケーションの実装は、EN ISO 10218や技術仕様ISO/TS 15066などの規格によって規制されています。基本的な要件は、アプリケーション全体(ロボット、グリッパー、ワークピース、環境)の慎重なリスクアセスメントを常に実施することです。本質的に安全なロボットであっても、危険なツールを扱う可能性があります。.
これらの発展は、「コボット」という用語の再定義につながっています。従来、この用語は小型、軽量、そして本質的に安全なロボットアームと同義でした。しかし、重作業用産業用ロボットへの協働機能の統合は、このパラダイムを打ち破りつつあります。「協働」という言葉は、名詞(ロボットの種類を表す「コボット」)から形容詞、あるいは一連の機能を表す「協働ロボットアプリケーション」へと進化しています。未来は、「コボット」と「産業用ロボット」の二者択一ではなく、適切な可搬重量と性能を備えた産業用ロボットを選択し、特定の用途に必要な協働安全機能を備えることにあります。これにより、重作業用組立や物流など、これまで人間と機械の緊密な協力が不可能だった分野に、人間とロボットの協働(HRC)の可能性が飛躍的に広がります。.
RaaSが解説:企業がロボット導入の障壁を下げる方法
重作業ロボット市場は、技術革新と新規分野への進出を背景に、持続的な成長が見込まれています。しかし、ロボット導入を成功させるには、企業は単なる技術評価にとどまらない戦略的な意思決定を行う必要があります。.
市場規模と成長予測
世界の産業用ロボット市場は、重要な成長分野です。市場規模の予測は分析の範囲と方法によって異なりますが、一貫してプラスの傾向を示しています。
- 分析では、2024 年の 339 億米ドルから 2030 年までに 605 億米ドルに成長すると予測されており、これは年平均成長率 (CAGR) 9.9% に相当します。.
- 別の調査では、2024年の169億米ドルから2029年には294億米ドル(CAGR 11.7%)に成長すると予測されています。.
- 3つ目の予測では、2024年の199億米ドルから2032年には555億米ドル(CAGR 14.2%)に成長すると予測されています。.
「重荷重ロボットプラットフォーム」の特定市場は、2024年には3億3,350万米ドルと推定され、2030年には4億4,600万米ドル(年平均成長率5.0%)に達すると予測されています。全体の数字との乖離は、重荷重ロボットが市場全体の中では価値集約型ではあるものの、平均よりも小さいセグメントであることを示しています。.
国際ロボット連盟(IFR)によると、世界の産業用ロボットの稼働在庫は2023年に過去最高の428万台に達し、前年比10%増加しました。2024年には一時的な市場縮小が見られましたが、2025年以降は長期的な成長傾向が回復すると予想されています。アジア、特に中国は依然として最大かつ最も急速に成長している市場であり、新規導入の70%を占めています。.
主要な成長要因と障害
成長の原動力:
- スキル不足と人口動態の変化: 多くの先進国では、有資格労働者の不足により、肉体的に過酷で反復的な作業の自動化が進んでいます。.
- インダストリー 4.0 とスマート マニュファクチャリング: 生産のネットワーク化とデジタル化には、中心となるコンポーネントとしてインテリジェントで柔軟なロボットが必要です。.
- 新たな分野の開発: 物流、建設、再生可能エネルギーなど、自動車分野以外の業界への導入が成長を牽引しています。.
- 持続可能性と国内回帰: ロボットは材料効率を向上させ、廃棄物を削減し、自国でのコスト効率の高い生産を可能にします。.
障害:
- 高額な初期投資: ロボット、その統合、および必要な周辺機器にかかるコストは、特に中小企業にとって大きな障害となります。.
- 統合の複雑さ: よりユーザーフレンドリーなインターフェースにもかかわらず、ロボットを既存のレガシー システムに統合し、相互運用性を確保することは依然として課題です。.
実施のための戦略的必須事項
大型ロボットの導入を検討している企業にとって、次のような戦略的考慮事項が重要です。
- 資本支出(Capex)からTCOとROIへの焦点の転換:投資判断は購入価格のみに基づいて行うべきではありません。エネルギー消費、保守、可用性を含む総所有コスト(TCO)と、スループットの向上、品質の向上、人件費の削減によってもたらされる投資収益率(ROI)の包括的な分析が不可欠です。.
- 新しいビジネス モデルの活用: Robotics-as-a-Service (RaaS) などのモデルにより、企業は資本投資を行うのではなく、運用費用としてロボットの機能をレンタルできるため、初期投資の障壁が低くなります。.
- 人材育成への投資:プログラミングを簡素化しても、有能な従業員の必要性がなくなるわけではありません。むしろ、求められるスキルは純粋なコードプログラミングから、プロセス最適化、システム監視、保守といったより高度なタスクへと移行します。企業は、これらのインテリジェントマシンを効果的に管理し、連携させるために、従業員のさらなるトレーニングに投資する必要があります。.
- ソフトウェアとエコシステムの優先順位付け:ロボットを選択する際には、メーカーのソフトウェアプラットフォーム、使いやすさ、そしてパートナーエコシステムの広さが重要な基準となります。強力なエコシステムは、事前に統合されたソリューションへのアクセスを提供し、変化する要件に対して投資を将来にわたって保護します。.
コンサルティング、計画、実装、プロジェクト管理など、あらゆる面でサポートいたします。
☑️ 戦略、コンサルティング、計画、実装における中小企業のサポート
☑️ デジタル戦略とデジタル化の策定または再調整
☑️ 国際販売プロセスの拡大と最適化
☑️ グローバル&デジタルB2B取引プラットフォーム
☑️ パイオニア事業開発

Konrad Wolfenstein
喜んであなたの個人アドバイザーを務めさせていただきます。.
下記の連絡フォームにご記入いただくか、 +49 7348 4088 965 。
私たちの共同プロジェクトを楽しみにしています。.
私に手紙を書いてください



Xpert.Digital - Konrad Wolfenstein
Xpert.Digital は、デジタル化、機械工学、物流/イントラロジスティクス、太陽光発電に重点を置いた業界のハブです。.
当社の 360° ビジネス開発ソリューションでは、新規事業からアフターセールスまで有名企業をサポートします。.
市場情報、マーケティング、マーケティング自動化、コンテンツ開発、PR、メールキャンペーン、パーソナライズされたソーシャルメディア、リード育成は、当社のデジタルツールの一部です。.
詳細については、 www.xpert.digital 、 www.xpert.solar 、 www.xpert.plus
連絡を取り合う