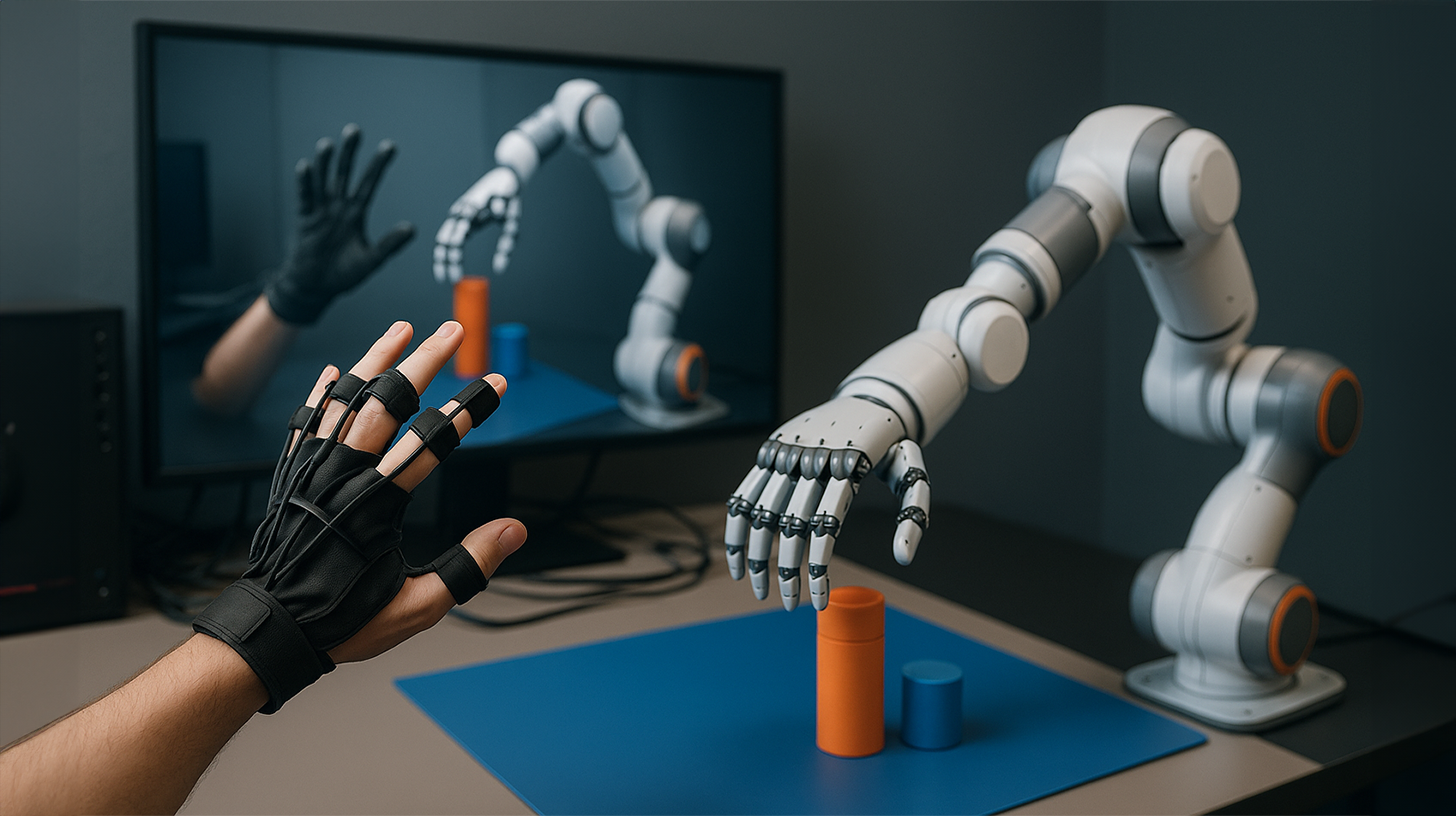
ロボットの遠隔操作:人間の手が距離を克服するとき – 画像:Xpert.Digital
ロボットはますます賢くなっているが、それでもなお、遠隔操作による人間の手を必要とする理由は何だろうか。
火星探査車から深海採掘まで:これらの遠隔操作ロボットは、人間が生存できない場所で活動している。
ベルリンの外科医が、手術室に足を踏み入れることなく、東京の患者に非常に精密な手術を行う様子を想像してみてください。操縦者が安全な岸辺に座り、まるでその場にいるかのようにロボットのあらゆる動きを感じながら、深海を探査する様子を想像してみてください。遠いSFのように聞こえるかもしれませんが、遠隔操作という魅力的な現実がここにあります。遠隔操作とは、人間が広大な距離を隔てて、まるで自分の体の延長のようにロボットを操ることを可能にする技術です。人工知能と自律性が特徴的な時代において、遠隔操作は根本的な原則を証明しています。それは、人間の直感、判断力、そして制御能力はかけがえのないものであるということです。.
しかし、遠隔手術は単なる医学的驚異にとどまりません。それは、火星探査車を操縦したり、アクセス困難な鉱山から資源を採掘したり、放射能汚染された災害地帯に踏み込んだりすることを可能にする、目に見えない力なのです。この包括的な考察では、この革命を支える驚異的な技術を明らかにするだけでなく、先見の明のあるニコラ・テスラにまで遡るその驚くべき起源を探り、成否を左右する恐ろしい通信遅延などの重要な課題を分析し、遠隔で生命や仕事をコントロールすることに伴う深刻な倫理的問題にも向き合います。存在と不在の境界を再定義し、人類のデジタル複製が私たちの世界をいかに永遠に変えていくのかを明らかにする旅に、ぜひご参加ください。.
人間のデジタル複製 ― 遠隔操作はいかにして境界を克服し、科学を進歩させ、慣習に挑戦するのか
ロボットの遠隔操作は、現代技術における最も魅力的なパラドックスの一つと言えるでしょう。それは、人間の操作者が物理的にその場にいなくても、同時に絶対的な存在感をもって操作できるという点です。ニューヨークの外科医が東京で手術を行う。検査官は安全な場所にいながら、ロボットのアバターが放射能汚染された遺跡に潜入する。鉱山会社は、水に足を踏み入れることなく水中鉱山を操業する。これはSFではなく、存在と不在、身体能力と認知制御といった従来の境界線を根本的に覆した技術の、まさに現実なのです。.
自動化が主流の現代社会において、遠隔操作(機械を人間が直接遠隔で制御する技術)が生き残り、繁栄しているのは逆説的に思えるかもしれない。しかし、この事実は技術に対するより深い理解を示している。すなわち、自律性は価値あるものだが、制御は不可欠であるということだ。遠隔操作はまさにこの原理を体現する技術であり、人間の知性、直感、意思決定能力を、機械システムの持つ物理的な力と無感覚さに融合させたものだ。遠隔操作ロボットシステムの市場規模は、2025年には約8億9000万ドルと推定され、2032年には40億ドル以上に成長すると予測されている。これは単なる経済的な関心の表れではなく、この技術が現代社会にもたらす根本的な変革の証でもある。.
歴史的起源:テスラの夢から現代の現実へ
遠隔操作の歴史はコンピュータから始まるのではなく、現在では主に電気と結びついている人物、ニコラ・テスラから始まる。1890年代、テスラは無線遠隔操作に関する画期的な実験を行い、現代の遠隔操作の根底にある基本原理を認識した。テスラは、電波が情報だけでなく、命令や制御も伝達できることを理解していた。遠隔操作可能なボートのレプリカである彼の「テレオートマトン」は、1898年に、機械が人間の意思を物理的に拡張し、遠隔地でも機能できることを実証した。テスラはこの発明で米国特許第613,809号を取得し、この特許はその後のすべての遠隔操作システムの知的基盤を築いた。.
しかし、テスラの構想は数十年間ほとんど実現されなかった。第二次世界大戦後になって初めて、実用的な必要性が技術の進歩を促した。1945年、シカゴ近郊のアルゴンヌ国立研究所で、アメリカ人科学者レイモンド・ゴーツは、放射性物質を安全に取り扱うためのマスタースレーブ型遠隔操作ロボットを開発した。この装置により、作業員は厚さ1メートルのコンクリート壁の後ろに座って、窓越しに放射性物質を操作することができた。これは最初の実用的な遠隔操作ロボットであり、理論上の可能性から産業上の現実への移行を象徴するものであった。技術革新は加速し、直接的な機械的連結部は電気サーボモーターに置き換えられ、密閉型テレビシステムとカメラによって、作業員は作業位置を選択したり、さまざまな視野角で作業したりできるようになった。.
1960年代、関心は宇宙空間や深海といった新たな領域へと移った。アメリカ、ソ連、フランスの海軍は、水中車両に搭載されたビデオカメラを備えた遠隔操作装置にますます関心を寄せるようになった。この時期に、従来の遠隔操作装置と区別するために「テレロボット」という用語が生まれた。テレロボットは、センサーとアクチュエーターを用いてコマンドを受信、保存、実行できるコンピュータシステムを備えていた。1970年代には、研究者のフェレルとシェリダンが「監視制御」の概念でフィールドワークに革命をもたらした。これは、オペレーターが高レベルの目標を伝え、コンピュータがそれを自律的に実行するというもので、オペレーターの作業負荷と通信帯域幅の要件を大幅に削減した。.
もう一つの画期的な出来事は、1980年代に予測表示技術が開発されたことである。これにより、通信遅延による遅れを補うために、ロボットのモデルをコンピュータ上でシミュレーションすることが可能になった。この技術開発のハイライトは、1993年にドイツ航空宇宙センター(DLR)がNASAのスペースシャトルに搭載した初の宇宙用遠隔操作ロボットの実証実験に成功したことであり、その際の通信遅延は6~7秒であった。.
外科手術における遠隔操作も、これと並行して発展を遂げた。1990年代、NASAエイムズ研究センターとスタンフォード大学は、外科手術における遠隔操作の概念開発に着手した。コンピュータ・モーション社のAESOPシステムは1994年にFDAの承認を取得した。2001年には、同じくコンピュータ・モーション社製のSOCRATESシステムが登場し、外科医が遠隔操作コンソールからロボットを操作しながら、手術部位のリアルタイム映像と音声通信を受信することで、グローバルな連携を可能にした。これらの開発は、今日この分野を席巻する最新のda Vinciシステムの基礎を築いたのである。.
アーキテクチャとメカニズム:遠隔操作の技術的基本構造
遠隔操作システムは、単にリモコンを備えたロボットではありません。それは、ハードウェアコンポーネント、ソフトウェアシステム、通信プロトコルが高度に複雑に相互作用することで、人間の意思を空間、そして場合によっては時間を超えてシームレスに拡張するシステムです。.
遠隔操作システムの中核は、マスターデバイス(制御ステーションとも呼ばれる)、スレーブデバイス(遠隔ロボット)、およびそれらを接続する通信チャネルという3つの基本要素から構成されます。マスターデバイスは、人間と機械の間のインターフェースです。これは、ジョイスティックとスイッチを備えた従来の制御パネル、ハンドトラッキング機能を備えた仮想現実ヘッドセット、オペレーターの動きを捉える外骨格、あるいはオペレーターの脳活動を解釈する脳コンピューターインターフェースなど、様々な形態があります。最新のARベースのシステムでは、HoloLens 2ヘッドセットを使用して、リアルタイムの環境センシング、処理、および仮想制御を実現しています。.
ロボット本体はスレーブデバイスです。マスターから受け取ったコマンドを物理的な動きに変換するアクチュエータと、周囲の環境に関する情報を収集するセンサーを備えています。これらのセンサーには通常、視覚フィードバック用のカメラ、障害物回避用の距離センサー、力・トルクセンサー、そして検査用温度計や手術用医療機器など、特定の用途向けの特殊センサーが含まれます。.
通信チャネルは、現代の遠隔操作システムにおいて最も重要な要素であると同時に、最大の弱点でもあります。ローカルなアプリケーションでは、通信遅延がミリ秒単位で測定される直接有線接続が利用できます。宇宙ミッションや水中など、より長距離の操作では、光ファイバーケーブル、無線、あるいは衛星リンクが使用されることがありますが、その場合、遅延は大幅に長くなります。コミュニケーションフィードバックシステムは非常に重要です。オペレーターは、ロボットが見ているものを見るだけでなく、ロボットが感じているものも感じなければなりません。抵抗、質感、力といった感覚を伝えるこの触覚フィードバックは、手術や壊れやすい物体の操作といった複雑な作業において特に重要です。.
技術的な実装は、複数の制御アーキテクチャ層から構成されます。最も単純な形態は直接遠隔操作で、オペレーターのあらゆる動作がロボットの対応する動作に直接変換されます。より高度な形態は監視型遠隔操作で、オペレーターが高レベルの目標を定義し、ロボットはローカルセンサーとコンピュータ制御の助けを借りて、経路と実行の詳細を自律的に決定します。さらに複雑なのが支援型遠隔操作で、人工知能がオペレーターの意図を予測し、受動的または能動的な支援を提供します。.
人間の腕に装着する外骨格システムと標的ロボットシステムの両方について、運動学と動力学を慎重にモデル化し、動作空間と力空間の間で効果的な双方向、連続的、非線形なマッピングを作成する必要があります。これは、オペレーターが遠隔ハードウェアと物理的に接触する外骨格ベースのシステムにおいて特に重要です。.
もう一つの重要な技術的要素は、拡張現実(AR)と仮想環境(VR)を制御インターフェースに統合することです。ARベースのシステムにより、オペレーターは遠隔地の現在の画像を見るだけでなく、計画データ、センサー情報、リアルタイムアラートなどの仮想オーバーレイを受け取ることができます。複雑な水中機雷除去作業で使用される仮想現実システムは、遠隔地のデジタル3Dレプリカを作成し、オペレーターが事前に計画を立てて行動を最適化できるようにします。.
現代の遠隔操作システムにおける5Gとエッジコンピューティングの役割は、いくら強調してもしすぎることはありません。5Gは超低遅延と高帯域幅を実現し、リアルタイム制御とフィードバックに不可欠です。エッジコンピューティングは、操作現場に近い場所でデータ処理を行うことで、ネットワーク負荷を軽減し、より複雑な遠隔操作を可能にします。.
🎯🎯🎯 Xpert.Digitalの5つの専門知識を1つの包括的なサービスパッケージで活用しましょう | BD、R&D、XR、PR、デジタル可視性の最適化


Xpert.Digitalの5つの専門知識を包括的サービスパッケージで活用 | R&D、XR、PR、デジタル可視性の最適化 - 画像: Xpert.Digital
Xpert.Digitalは、様々な業界にわたる深い知識を有しています。これにより、お客様の特定の市場セグメントのニーズと課題に的確に合致した、カスタマイズされた戦略を策定することができます。市場トレンドを継続的に分析し、業界の動向をモニタリングすることで、先を見越した行動を取り、革新的なソリューションを提供することができます。経験と専門知識を組み合わせることで付加価値が生まれ、お客様に決定的な競争優位性を提供します。.
詳細はこちら:
遠隔操作:遠隔ロボットが医療、海洋、そして火星を結びつける方法
現在の応用例:遠隔操作が今日世界を変えている分野
現代の遠隔操作技術は、当初の原子力エネルギーや宇宙開発の領域をはるかに超えて普及している。医療、産業、災害救援など、様々な分野における重要なアプリケーションの基盤となっているのだ。.
おそらく最もよく知られている応用例は、遠隔手術でしょう。Intuitive Surgical社のda Vinciサージカルシステムは、業界標準となっています。世界中で1,200万件以上の遠隔手術が実施され、このシステムは世界中で6万人以上の外科医のトレーニングに活用されてきました。2023年だけでも、da Vinciプラットフォームを使用した手術は220万件を超え、2024年末までに250万件を超える見込みです。このシステムは、外科医が手術野の3Dビューを見ながら操作するコンソールを備え、遠隔操作のロボットアームがマイクロメートル単位の精度で器具を誘導します。そのメリットは大きく、切開部の縮小、出血量の減少、回復の迅速化、そして外科医の身体的負担の軽減などが挙げられます。.
2024年以降、DLR-MIRO技術に基づいたメドトロニック社のHugo RASなどの新しいシステムも市場に投入され、より費用対効果の高い代替手段を提供することで、小規模病院でも遠隔手術をより利用しやすくする可能性を秘めている。.
もう一つの重要な応用分野は宇宙探査です。NASAの火星探査車パーセベランスは、地球上のオペレーターによって遠隔操作されていますが、通信遅延は5分から20分(地球と火星の位置関係によって異なる)です。そのため、探査車には半自律的な動作が求められます。つまり、オペレーターは高レベルのコマンドを与えますが、探査車は局所的なナビゲーション判断を自ら行います。このような遠隔操作と自律性の組み合わせは、将来の他の天体探査ミッションにおいて、さらに重要になるでしょう。.
水中での応用は著しく拡大している。欧州連合の資金援助を受けたVAMOS(Viable Alternative Mine Operating System:実行可能な代替鉱山操業システム)プロジェクトでは、オペレーター向けに高解像度3D VRベースのインターフェースを備えた遠隔操作式水中採掘システムを開発している。これらのシステムは、高帯域幅の光ファイバーケーブルを介して地上の制御ステーションに接続される。.
災害対応ロボットにおいて、遠隔操作は生命線となっている。DARPAロボティクス・チャレンジでは、福島原発事故のような複雑な災害シナリオにおいて、遠隔操作ロボットが人間にとって危険すぎる環境で作業を行う様子が実証された。最新のシステムは、立体視ヘッドマウントディスプレイとリアルタイム3D環境センシングを活用し、オペレーターに遠隔地の環境を臨場感たっぷりに把握させる。.
物流やラストマイル配送も、ますます人気が高まっている用途の一つです。エリクソンがバルセロナで行ったデモンストレーションでは、運転手が2,000キロメートル以上離れたスウェーデンから自律走行型電気トラックを制御することに成功しました。また、カリフォルニア州の2つのスタジアムが新型コロナウイルス感染症の治療センターに転用された際、遠隔操作ロボットが医療物資の運搬にも使用されました。.
現在の課題:技術が物理的な限界に直面するとき
著しい進歩が見られるものの、遠隔操作は依然として、技術的に可能なことの限界を示す根本的な課題に直面している。.
最も深刻な問題は、通信遅延、つまりレイテンシです。ローカルの遠隔操作システムでは遅延は数ミリ秒程度ですが、距離が離れるにつれて劇的に増加します。月面手術の場合、通信遅延は往復で約2秒ですが、火星での手術では最大40分にも達する可能性があります。研究によると、遠隔操作のパフォーマンスは約300ミリ秒までは安定していますが、それ以降は低下し始め、300ミリ秒を超えると経路追跡エラーや衝突エラーが急激に増加します。外科医は実際には250~300ミリ秒を超える遅延でパフォーマンスが低下し、これは遠隔手術にとって重大な意味を持ちます。.
1990年代に開発された予測表示技術は、確かに機能したが、オペレーターのコマンドに基づいて遠隔システムの将来の状態をシミュレーションするものであった。これらの技術には限界があり、特に予期せぬ環境変化や遠隔ロボットが抵抗に遭遇した場合などに顕著である。.
2つ目の根本的な問題は、触覚通信です。力、トルク、触覚フィードバックをネットワーク経由で送信するには、高いパケットレートが必要となり、パケット損失やジッターが発生しやすくなります。これはシステムの安定性を損ない、ユーザーのパフォーマンスを低下させます。従来のインターネット接続ではこれらの要件を満たすことができない場合が多く、専用の通信プロトコルと制御アルゴリズムが必要となります。.
3つ目の問題は、オペレーターの状況認識能力です。身体にカメラを装着したロボットは、現場で積極的に視野をスキャンし、空間的に周囲を見渡せる人間と比べて、限られた視点しか持ち合わせていません。これは、複雑な環境や動的な環境では特に問題となります。ARやVRソリューションはこの問題を軽減するのに役立ちますが、情報が多すぎると認知過負荷を引き起こす可能性があります。.
データ帯域幅もまた制約要因の一つです。高解像度ビデオや、ライダーなどのセンサーからの3Dスキャンデータを送信すると、特に帯域幅が限られている水中や宇宙ミッションでは、利用可能なネットワーク容量をあっという間に使い果たしてしまう可能性があります。.
セキュリティもまた重要な課題です。エラーの原因は多岐にわたり、ネットワーク障害、予期せぬ物理的相互作用、予測不可能な環境条件などが挙げられます。手術や災害対応といった重要な場面では、エラーは致命的となる可能性があります。そのため、遅延、パケット損失、その他の不確実性に対応できる堅牢な制御システムに関する研究がますます増えています。.
倫理的・社会的な論争:遠隔操作の暗黒面
遠隔操作は技術的には素晴らしいものの、倫理的、法的、社会的な重大な問題を提起しており、それらはこれまで部分的にしか解決されていない。.
遠隔手術においては、インフォームド・コンセントと患者の自律性に関する問題が中心的な課題となる。言語の壁、ロボット手術に対する文化的な認識の違い、医療インフラの格差などが、倫理的監督を著しく複雑化させている。各国の医療慣行、責任体制、データ保護基準は大きく異なり、結果として法制度は断片化している。現状では、これらの手術を規制する統一的な法律は存在しない。.
責任の所在に関する問題は特にデリケートである。遠隔手術中に技術的なエラーが発生した場合、誰が責任を負うのか(執刀医、医療機関、技術提供者など)が不明確な場合が多い。国境を越えた遠隔手術においては、各国の法管轄が異なるため、この曖昧さはさらに深刻化する。.
データ保護とデータセキュリティは、さらに重要な懸念事項です。遠隔手術では、機密性の高い患者情報が国境を越えて送信されるため、セキュリティ侵害や不正アクセスのリスクにさらされます。欧州のGDPRや米国のHIPAAといったデータ保護法を遵守することが不可欠です。.
もう一つの重要な側面は、公平なアクセスという問題です。遠隔手術は、農村部と都市部、高所得国と低所得国の間の医療格差を埋める可能性を秘めていますが、現実は必ずしもそうではありません。高価なロボットシステムや必要なインフラは、多くの国や医療機関にとって手の届かないものです。.
軍事用途や災害救援用途においては、悪用の可能性が懸念されている。遠隔操作型ドローンやロボットシステムは、偵察、監視、さらには攻撃作戦にも使用される可能性があり、国際的な規制や倫理的な使用に関する問題が提起されている。.
さらに研究が進んでいないものの、ますます懸念されているのが、雇用への影響である。遠隔操作によって、一人のオペレーターが複数の遠隔ロボットを制御したり、高度なスキルを要する作業を外部委託したりすることが可能になるため、特定の分野の労働市場は大きく混乱する可能性がある。高賃金地域から低賃金地域へと雇用が移転する可能性もある。.
未来のトレンド:リモートコントロールの新たな地平
遠隔操作の未来は、変革をもたらす可能性のあるいくつかの収束するトレンドによって形作られるだろう。.
人工知能と機械学習は、人間の制御を置き換えるのではなく、それを強化する目的で、遠隔操作システムにますます統合されつつあります。AIは経路計画を支援したり、障害物を予測したり、定型的なサブタスクを自動化したりすることで、人間のオペレーターがより高度な意思決定に集中できるようになります。予測モデルはロボットシステムの挙動を予測し、通信遅延を補正することができます。.
脳波インターフェース(BCI)は、全く新しい分野を切り開くものです。ジョイスティックやセンサーといった従来のインターフェースは比較的直感的ですが、脳波を直接捉えてロボットを制御することで、ユーザーエクスペリエンスは劇的に変化する可能性があります。すでに研究では、脳活動をロボットのコマンドに約80%の精度で変換できるシステムが実証されています。このようなシステムは、建設現場、水中、宇宙空間など、作業者の身体的な動きが制限される環境で特に有用となるでしょう。.
5Gおよび将来の6Gネットワークは、グローバルな遠隔操作の基盤となるインフラを構築する。これらのネットワークの超低遅延と高帯域幅により、かつてない精度と応答性を備えた遠隔操作が可能になる。.
仮想現実(VR)と拡張現実(AR)は、より没入感があり直感的な操作インターフェースを実現するために開発が続けられています。オペレーターは、遠隔地へ仮想的に「足を踏み入れ」、自身の空間認識能力を駆使してロボットを誘導できるようになるでしょう。.
もう一つの重要なトレンドは、複数のロボットが協調して動作する群ロボットの統合です。ロボット群の遠隔操作は特有の課題を伴いますが、同時に災害対応や探査における能力を大幅に向上させる可能性も秘めています。.
ロボットのハードウェアとソフトウェアのコストが継続的に低下することで、遠隔操作はより幅広い用途や組織で利用可能になるだろう。例えば、Hugoシステムは、da Vinciよりも費用対効果の高い代替手段を提供する。.
もう一つの有望なトレンドは、遠隔操作と自律システムの組み合わせです。完全な自律性や完全な遠隔操作ではなく、ハイブリッドなアプローチが将来の主流となる可能性があります。つまり、ロボットは単純な作業やナビゲーションを自律的に処理し、複雑な判断や予期せぬ事態が発生した場合は人間のオペレーターが対応するというものです。.
最後に、遠隔操作における国際協力は拡大している。特に医療など、国境を越えた協力が期待される分野では、国際標準やベストプラクティスに関する研究が増加するだろう。.
文明の未来における遠隔操作の決定的な役割
遠隔操作は、単なる技術的な仕掛けや、特殊なケースへの解決策にとどまるものではありません。それは、人間と機械の関係、地域的な存在とグローバルな存在の関係、そしてリスクとセキュリティの関係を根本的に変える革新的な技術です。.
この技術は、ある単純な真実から生まれたものです。それは、危険すぎる、遠隔地すぎる、精密すぎる、あるいは肉体的に過酷すぎるといった理由で、人間には実行できない仕事が存在するということです。遠隔操作は、抽象化によってこの問題を解決します。つまり、行動の場所を、行動の場所から抽象化するのです。ニューヨークにいるオペレーターは、まるで制御室にいるかのように、汚染された原子力発電所のメルトダウン現場でロボットを安全に操作することができます。.
外科手術、宇宙開発、水中作業、災害対応などにおける遠隔操作の現在の応用例は、この技術の極めて重要な意義を示している。これらの分野はいずれも、遠隔操作が有効であるだけでなく、重大な問題に対する唯一の現実的な解決策となる場合が多いことを証明している。.
通信遅延や触覚フィードバックといった課題は、克服不可能なものではありません。しかし、通信ネットワーク、制御アルゴリズム、ヒューマンインターフェースにおける継続的なイノベーションが不可欠です。5Gや将来のネットワークは、これらの課題の多くを軽減するでしょう。.
倫理的な懸念は確かに存在するが、遠隔操作に限った問題ではない。これらは、技術、アクセス、責任、公平性といった普遍的な問題のバリエーションと言える。慎重な規制、国際基準、そして開かれた公開討論が必要となるだろう。.
将来を見据えると、遠隔操作は完全な自律操作に取って代わられるのではなく、むしろそれと融合していく可能性が高い。ロボットが自律的な能力を持ちながらも、重要な作業や異常事態においては人間のオペレーターに介入するハイブリッドシステムが、主流のアーキテクチャとなるかもしれない。.
最終的な結論は何でしょうか?遠隔操作は、人間の基本的な能力、すなわち肉体の限界を超えて能力を拡張する能力を具現化したものです。それは人間性を代替するものではなく、むしろ人間性を拡張するものです。急速な自動化と人工知能の時代において、遠隔操作は人間の知性、判断力、そして制御能力の永続的な重要性と価値を証明するものです。それはニッチな分野にとどまらず、現代の技術インフラにおいてますます目立ち、重要な部分を占めるようになるでしょう。市場は成長し、技術は向上し、社会はその機会を活用し、リスクに対処する方法を学ぶでしょう。.
グローバルマーケティングとビジネス開発のパートナー
☑️ 当社のビジネス言語は英語またはドイツ語です。
☑️ 新機能: 母国語での対応!

Konrad Wolfenstein
私と私のチームは、あなたの個人アドバイザーとして喜んでお手伝いさせていただきます。.
こちらの問い合わせフォームにご記入いただくかwolfenstein@xpert.digital。、 +49 7348 4088 965までお電話ください。メールアドレスはです
私たちの共同プロジェクトを楽しみにしています。.
☑️ 戦略、コンサルティング、計画、実装における中小企業のサポート
☑️ デジタル戦略とデジタル化の策定または再調整
☑️ 国際販売プロセスの拡大と最適化
☑️ グローバル&デジタルB2B取引プラットフォーム
☑️ パイオニア事業開発 / マーケティング / PR / 見本市
ビジネス開発、販売、マーケティングにおける世界的な業界と経済の専門知識

ビジネス開発、販売、マーケティングにおける当社のグローバルな業界および経済に関する専門知識 - 画像: Xpert.Digital
業界重点分野:B2B、デジタル化(AIからXRまで)、機械工学、物流、再生可能エネルギー、産業
詳細はこちら:
洞察と専門知識を提供するテーマ別ハブ:
- 世界および地域の経済、イノベーション、業界特有のトレンドを網羅した知識プラットフォーム
- 当社の主要重点分野に関する分析、洞察、背景情報のコレクションです。
- ビジネスとテクノロジーの最新動向に関する専門知識と情報を提供する場所
- 市場、デジタル化、業界のイノベーションに関する情報を探している企業のためのハブ。