触覚ロボティクス:触覚を持つロボット:VulcanとMITによる触覚物体認識研究の新世代 – 画像:Xpert.Digital
特別なセンサーを必要としないMITの物体認識システムとAmazonのVulcanロボット
機械の触覚認識:物体認識における新たな基準の設定
ロボット工学の分野において、触覚センサーと認識システムの開発は極めて重要な進歩であり、機械が初めて周囲の環境を「見る」だけでなく「感じる」ことを可能にしました。この進歩は、Amazonの新型ロボット「Vulcan」とMITの革新的な物体認識システムに代表されます。どちらの技術もロボットの用途を飛躍的に拡大し、これまでは人間の自然な触覚知覚によってのみ可能であったタスクを可能にします。
に適し:


アマゾンのバルカンロボット:触覚ロボットの把持分野における画期的な進歩
機能と技術基盤
Amazonが開発したVulcanロボットは、物理人工知能分野における重要な技術的進歩を象徴しています。Amazon自身もこの開発を「ロボット工学と物理AIにおけるブレークスルー」と表現しています。このシステムは、物体を収納する「Stow」と、物体を取り出す「Pick」という2つの主要コンポーネントで構成されています。その優れた特徴は、周囲の環境を触覚的に認識する能力です。
Vulcanの触覚能力の技術的基盤は、ホッケーのパックのような形をした特殊な力覚センサーです。これにより、ロボットは物体を傷つけずに掴むためにどの程度の力を加えることができるかを「感じる」ことができます。AmazonのロボティクスAIディレクター、アダム・パーネス氏は、このアプローチの独自性を強調し、「Vulcanは物体を移動できる最初のロボットではありません。しかし、触覚、つまり物体にいつ、どのように接触するかを理解する能力によって、ワークフローと施設の最適化に新たな可能性が開かれます」と述べています。
商品を棚に仕分ける際、ヴァルカンはヘアアイロンに取り付けられた定規のような道具を使います。この「定規」を使って、他の商品を押しのけ、新しい商品のためのスペースを確保します。グリッパーアームは商品のサイズと形状に応じてグリップ力を調整し、一体型のコンベアベルトが商品をコンテナに運び込みます。商品を取り出す際、ヴァルカンは吸引グリッパーとカメラシステムを組み合わせて使用します。
現在の応用分野とパフォーマンス
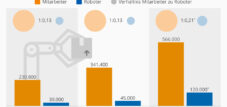
Vulcanロボットは現在、ハンブルク近郊のヴィンゼン(ドイツ)とワシントン州スポケーン(米国)の2つのAmazon物流センターで試験運用されています。ワシントン州では、6台のStow Vulcanロボットが稼働しており、既に50万点の商品を保管しています。ヴィンゼンでは、2台のPick Vulcanロボットが稼働しており、既に5万件の注文を処理しています。
このシステムの能力は驚異的です。Vulcanは現在、Amazonが提供する数百万点の商品の約75%を処理できます。ロボットが扱える最小の物体は、口紅やUSBメモリ程度の大きさです。特に印象的なのは、ロボットが物体をリアルタイムで識別する能力です。パーネス氏が説明するように、「ロボットが商品のすべての詳細を記憶することは不可能」です。
将来の計画と物流チェーンへの統合
Amazonは今後数年間でVulcanロボットの数を大幅に増やす計画です。今年は、ヴィンゼンのVulcanロボットの数が60台、ワシントンD.C.のVulcanロボットの数が50台に増加する予定です。長期的には、ヨーロッパとアメリカの物流センターにVulcanロボットを導入する予定です。
アマゾンの戦略の重要な要素の一つは、人間と機械の共存です。同社の「マスタープラン」では、人間と機械が隣り合って働くことを想定しています。ロボットは主に、はしごを使わずには届かない、あるいは無理に体を曲げる必要がある棚の商品を扱うことを目的としています。これにより、全体的な効率性が向上すると同時に、人間の従業員の作業負荷も軽減されると期待されています。
MITのハンドリングによる物体検出システム:特別なセンサーを使わないインテリジェントな「センシング」
物体認識への革新的なアプローチ
AmazonのVulcanと並行して、MIT、Amazon Robotics、ブリティッシュコロンビア大学の研究者たちは、ロボットに触覚能力を与えるための異なるアプローチを採用したシステムを開発しました。この技術により、ロボットは物体を手に取って軽く振るだけで、重さ、柔らかさ、中身などの特性を認識できるようになります。まるで人間が見慣れない物体を扱う時のように。
このアプローチの特別な点は、特別な触覚センサーを必要としないことです。代わりに、このシステムはほとんどのロボットに既に搭載されている関節エンコーダーを使用します。関節エンコーダーは、動作中の関節の回転位置と速度を検出するセンサーです。MITのポスドク研究員であり、この研究論文の筆頭著者であるピーター・イチェン・チェン氏は、このプロジェクトのビジョンについて次のように説明しています。「私の夢は、ロボットを世界に送り出し、物に触れたり動かしたり、相互作用するあらゆるものの特性を自ら発見できるようにすることです。」
技術機能とシミュレーションモデル
MITシステムの中核は、ロボットとその動きをシミュレートするモデルと、物体のダイナミクスを再現するモデルの2つで構成されています。MITのポスドク研究者であるChao Liu氏は、これらのデジタルツインの重要性を強調し、「現実世界の正確なデジタルレプリカは、私たちの手法の成功にとって非常に重要です」と述べています。
このシステムは「微分可能シミュレーション」と呼ばれる技術を用いており、質量や柔らかさといった物体の特性の小さな変化がロボットの関節の最終的な位置にどのような影響を与えるかをアルゴリズムが予測することを可能にします。シミュレーション結果がロボットの実際の動きと一致すると、システムは物体の正しい特性を特定したことになります。
この手法の主な利点はその効率性です。アルゴリズムは数秒以内に計算を実行し、ロボットの実際の動作軌跡さえあれば機能します。これにより、このシステムは特に費用対効果が高く、実世界でのアプリケーションに実用的となります。
応用の可能性と利点
開発された技術は、暗い地下室での物体の仕分けや、地震後に一部崩壊した建物内の瓦礫の撤去など、カメラがあまり効果的でない用途で特に役立つ可能性がある。
このアルゴリズムは、コンピュータービジョンや外部センサーに依存する一部の手法とは異なり、学習に大規模なデータセットを必要としないため、未知の環境や新しい物体に直面してもエラーが発生しにくくなります。これにより、システムは特に堅牢で汎用性に富んでいます。
ロボット工学における触覚センサーの幅広い研究展望
根本的な課題と現在の解決策
触覚を持つロボットの開発は、研究者にとって根本的な課題を突きつけています。人間の触覚システムは非常に複雑で繊細ですが、人工システムは技術的な手段を用いてこれを再現する必要があります。カリフォルニア大学バークレー校のロボット工学者、ケン・ゴールドバーグ氏は、この課題の複雑さを強調し、「人間の触覚は信じられないほど繊細で複雑であり、そのダイナミックレンジは広大です。ロボットは急速に進歩していますが、今後5~10年のうちに人間レベルの触覚センサーが登場するとは驚きです」と述べています。
こうした課題にもかかわらず、研究は大きく進歩しています。例えば、フラウンホーファーIFFは、人間の手を模倣した反応的な把持を可能にする触覚センサーシステムを開発しており、壊れやすい物体や柔軟な物体の取り扱いに最適です。センサーデータは、グリッパーの適応、部品と位置の認識、そしてプロセス監視に活用されます。
触覚ロボット分野における革新的な研究プロジェクト
Amazon と MIT による開発の他に、触覚ロボット センサーの分野では他にも重要な研究プロジェクトがあります。
マックス・プランク知能システム研究所は、高感度で触覚を検知する触覚センサー「Insight」を開発しました。同研究所の研究グループを率いるゲオルク・マルティウス氏は、このセンサーの性能を強調し、「革新的な筐体の機械設計、内部のカスタム設計による画像化システム、自動データ取得、そして最先端のディープラーニング手法により、卓越した性能を発揮しています」と述べています。このセンサーは非常に高感度で、重力に対する自身の向きさえも感知可能です。
もう一つの興味深いプロジェクトはDensePhysNetです。これは、一連の動的インタラクション(例えば、滑りや衝突)を能動的に実行し、視覚観測に基づく深層予測モデルを用いて、観測対象物の物理的特性を反映した高密度なピクセル単位の表現を学習するシステムです。シミュレーションと実世界環境の両方で行った実験により、学習された表現には豊富な物理情報が含まれており、摩擦や質量といった物理的特性を直接解読するために使用できることが示されています。
に適し:

触覚ロボットシステムの将来展望
マルチモーダルセンサーシステムの統合
触覚ロボットの未来は、様々な感覚様式の統合にあります。MITの研究者たちは既に、視覚や触覚といった感覚を統合する人工知能の学習に取り組んでいます。これらの様々な感覚様式がどのように相互作用するかを理解することで、ロボットは周囲の環境をより包括的に理解できるようになります。
MITチームは既に、物体検出手法とコンピュータービジョンを組み合わせ、さらに強力なマルチモーダルセンサーシステムの開発を計画しています。「この研究はコンピュータービジョンに取って代わるものではありません。どちらの手法にも長所と短所があります。しかし、今回の研究では、カメラがなくてもこれらの特性のいくつかを検出できることを示しました」とチェン氏は説明します。
応用分野の拡大と今後の展開
MITチームの研究者たちは、ソフトロボットなどのより複雑なロボットシステムや、液体のスロッシングや砂のような粒状媒体といったより複雑な物体への応用も検討したいと考えています。長期的には、この技術を用いてロボットの学習能力を向上させ、将来のロボットが新たな操作スキルを迅速に習得し、環境の変化に適応できるようにしたいと考えています。
Amazonは今後数年間でVulcanテクノロジーをさらに大規模に開発・展開する計画です。Vulcanを同社の既存の75万台の移動ロボット群と統合することで、物流業界に根本的な変革をもたらす可能性のある包括的な自動化コンセプトが実現します。
触覚学習:センサーがロボットに触覚を与えるとき
AmazonのVulcanやMITの物体認識システムに代表される触覚ロボットの開発は、ロボット工学における重要な転換点となっています。これらの技術により、ロボットはこれまで人間のみが担っていた、微細運動能力と触覚認識を必要とする作業を担うことが可能になります。
Amazonの専用センサーへの注力と、MITの既存のセンサーを触覚推論に利用するというコンセプトといった異なるアプローチは、この分野における研究の方向性の多様性を示しています。どちらのアプローチにも、それぞれ独自の強みと応用分野があります。
ロボットシステムへの触覚機能の統合が進むにつれ、物流、製造、医療など、多くの分野における複雑なタスクの自動化に新たな可能性が開かれています。ロボットが周囲の環境を見るだけでなく「感じる」能力は、ロボットと人間がより緊密かつ直感的に協働できる未来に大きく近づきます。
に適し: