ロボットを備えた自動倉庫 – 画像: Xpert.Digital
自律ロボットかシャトルシステムか?変革型倉庫テクノロジー:企業の競争優位性を確保する戦略は?
イントラロジスティクスにおける自動化革命
現代経済の神経系とも言えるイントラロジスティクスは、今、大きな変革期を迎えています。将来、どの倉庫システムが主流となるのか――構造化され、スループットが最適化されたシャトルシステムか、それとも柔軟性と自律性を備えたロボットか――という問題は、単なる技術的な議論をはるかに超えるものです。これは、ますます不安定化する世界において、企業の競争力、回復力、そして将来の存続を左右する、極めて重要な戦略的決定となっています。.
これに関連して:


「シャトル vs. ロボット」の議論が今日の産業の将来にとってなぜそれほど重要なのでしょうか?
この発展を力強く推進しているのは、3 つの基本的な力です。.
- まず、eコマースの急激な成長は、顧客の期待を永遠に再定義しました。即時の在庫確保、当日配送、そしてエラーのない注文処理への需要は、倉庫や配送センターに計り知れないプレッシャーをかけています。.
- 第二に、多くの先進国における熟練労働者および一般労働者の慢性的な不足が、状況を劇的に悪化させています。反復的で肉体的に過酷な倉庫作業に従事できる有能な人材の確保と確保は、業務運営における最大の課題の一つとなっています。.
- 第三に、運営費、エネルギー費、不動産費の上昇により、企業はスペースをより効率的に使用し、細部に至るまでプロセスを最適化する必要に迫られています。.
このような背景から、自動化はもはや選択肢ではなく、必要不可欠なものとなっています。世界の倉庫自動化市場は、この緊急性を如実に反映しています。2024年には推定265億米ドルの市場規模に達し、2034年までの年平均成長率(CAGR)は15.9%を超えると予測されており、最もダイナミックなテクノロジーセクターの一つとなっています。しかしながら、驚くべきことに、この急速な成長にもかかわらず、世界中の倉庫の約80%は依然として主に人力で運営されています。この膨大な未開拓のポテンシャルこそが、シャトルシステムと自律移動ロボット(AMR)が覇権を争う戦場となっています。.
これら2つの技術哲学の選択は、企業の戦略的方向性に関する決定です。これは、現代のサプライチェーンにおける根本的な緊張関係、すなわち、高度に最適化された予測可能なプロセスによるコスト効率の向上と、最大限の適応性と柔軟性を備えたオペレーションによる俊敏性への要求との間の葛藤を反映しています。シャトルシステムは、構造化された効率性を物理的に体現したものであり、固定されたインフラストラクチャ内で最大のストレージ密度と最高のスループットを実現するように設計されています。一方、AMRは、動的で絶えず変化する環境に対応できるように設計された、適応性の高い柔軟性を体現しています。シャトルシステムに投資する企業は、製品構成と受注構造が十分に安定し、この極端な最適化の恩恵を受けることができる未来に賭けています。AMRを選択する企業は、変動性と予測不可能性に満ちた未来を見据えており、迅速な適応能力が決定的な競争優位性となります。したがって、技術決定は、自社の市場に対する企業の戦略的予測を反映するものとなります。.
コアテクノロジーの定義と機能
シャトル システムとは具体的に何を意味し、その中核となるコンポーネントは何ですか?
シャトルシステムは、コンテナ、カートン、トレイなどの標準化された積荷ユニットを迅速かつ効率的に保管、移動、取り出しするために設計された、高度に動的なコンピュータ制御の自動小型部品倉庫(AS/RS)です。これは、「コンベアベルト」という単純なアナロジーをはるかに超える複雑なメカトロニクスシステムです。このシステムの性能と効率は、コアコンポーネントの精密な相互作用によって実現されます。
- ラックシステム:システムの静的バックボーンは、積載ユニットの保管チャネルを形成する高密度鋼構造です。これらのラックは、利用可能な高さを最大限に活用するように設計されており、高さは20メートル以上、場合によっては30メートルに達することもあります。.
- シャトル(車両):まさに主力車両です。棚1段内をレール上を水平移動する自律走行車両です。伸縮式フォークなどの荷役装置を備え、棚から荷物をピックアップし、通路の端まで搬送します。.
- リフト/ホイスト:これらの必須コンポーネントは垂直方向の接続を提供します。積載ユニット、またはシステム構成によってはシャトル自体を、異なるラックレベルとプレゾーン(通常はコンベア技術で構成)の間で搬送します。これらの性能は、システム全体のスループットにとって重要な要素となることがよくあります。.
- コンベア技術:ローラーコンベアまたはベルトコンベアの連結ネットワークが外部とのインターフェースを形成します。このネットワークは、商品を保管ステーションからエレベーターへ、そしてエレベーターからピッキング、梱包、出荷作業場などの下流工程へと搬送します。.
- 制御・ソフトウェア(WMS/WCS/MFS):オペレーション全体の「頭脳」です。上位レベルの倉庫管理ソフトウェア(WMS)、または専用の倉庫管理システム(WCS)、あるいはマテリアルフローシステム(MFS)が、あらゆる動きを調整します。保管場所の管理、シャトルやリフトの移動戦略の最適化、そしてERP(エンタープライズ・リソース・プランニング)システムなどの企業全体のITシステムとのシームレスな統合を実現します。.
シャトル システムの基本的なタイプは何ですか? また、それらのアーキテクチャとアプリケーションはどのように異なりますか?
シャトルシステム技術は、硬直した1次元アーキテクチャから高度に柔軟な3次元システムへと飛躍的な進化を遂げてきました。この開発は、より高い柔軟性と拡張性を求める市場の需要の高まりに直接応えたものです。.
- シングルレベル・シャトル:これは、各シャトルが単一のラックレベルと通路に恒久的に割り当てられる典型的なアーキテクチャです。スループットは、各レベルあたりのシャトル数とエレベーターの容量によって決まります。拡張性は主に通路を追加することで実現されます。例としては、SSI FlexiシステムやCubyシステムが挙げられます。.
- 多段式シャトル:このタイプは、従来のSRM(保管・検索機械)とシャトルのハイブリッドとも呼ばれ、一体型の昇降機構により通路内の複数の階層に対応できます。これにより、ラック構造の複雑さとコストが軽減され、中~高スループットのアプリケーションにおいて魅力的な価格性能比を実現します。一例として、Schäfer Lift & Run(SLR)システムが挙げられます。.
- レーンチェンジ/3Dシャトル:飛躍的な進化を遂げたシャトルです。これらのシャトルは、通路内を水平に移動するだけでなく、通路の切り替えも行えます。これにより、パフォーマンス(シャトルの数)と保管容量(ラックの数)が完全に切り離されます。企業は数台のシャトルから始めて、需要の増加に合わせて容易に増設することができます。さらに、システム内で直接取り出す商品の100%の順序付けが可能になり、下流の仕分けプロセスが不要になる可能性があります。KNAPP Evo Shuttle 2Dは、このタイプのシャトルの代表的な例です。.
- クライミングロボット/キューブ型ストレージシステム:この革新的な開発は、従来のシャトル構造を打破するものです。ロボットは、高密度に積み重ねられたコンテナ上のグリッドフレーム上を移動(例:AutoStore)、またはラック構造上を直接昇降(例:Exotec Skypod)します。これらの3Dシステムは、独立した通路やリフトを一切必要とせず、極めて高い保管密度と柔軟性を実現します。.
- パレットシャトル:パレット全体を高密度に保管するための特殊なカテゴリーです。これらの堅牢なシャトルは、深い保管チャネルで動作し、冷蔵施設や生産工程のバッファ保管によく使用されます。.
シャトル業界におけるこの技術革新は目覚ましいものがあります。これは、メーカーがより柔軟なAMRの課題を認識し、通路変更や3次元的な運用といったAMR特有の特性を自社の高密度保管パラダイムに積極的に取り入れようとしていることを示しています。その結果、かつては明確だった境界線は曖昧になりつつあり、今日の最先端の「シャトルシステム」は、基本的に定義された構造内で動作する、特殊化された垂直指向のAMRシステムとなっています。.
倉庫における「ロボット」とは何でしょうか。また、自律移動ロボット (AMR) と無人搬送システム (AGV) の決定的な違いは何でしょうか。
倉庫管理の文脈において、「ロボット」という一般的な用語と、AGV(無人搬送車)やAMR(自律移動ロボット)といった特定の技術との区別は根本的に重要です。どちらも資材を輸送しますが、そのナビゲーション原理は根本的に異なります。.
- AGV(無人搬送車):これは古くから確立されている技術です。AGVは「誘導型」車両です。床面の磁気テープ、色付きの線、反射板を狙ったレーザースキャナー、その他の誘導システムによって事前に設定された、物理的または仮想的に定義された固定経路を走行します。AGVの知能は限られており、障害物に遭遇すると停止し、経路が再び開けるまで待機します。導入は複雑で、多くの場合、インフラの構造変更が必要となり、結果としてシステムは固定的なものになります。経路を変更するには、多大な労力を要します。.
- AMR(自律移動ロボット):これはより新しく、はるかにインテリジェントで柔軟性の高い技術です。AMRは「自律型」車両です。外部からの誘導を必要としません。周囲のデジタルマップを作成し、自動運転車のように自由に移動できます。高度なセンサーを用いて、人、フォークリフト、放置されたパレットなどの障害物をリアルタイムで検知し、それらを回避するための代替ルートを動的に計画します。導入は迅速で、構造変更を必要とせず、最大限の柔軟性を提供します。.
AGVがよりインテリジェントな機能を搭載するにつれて、技術的な境界はますます曖昧になっていますが、本質的な違いは変わりません。AGVはあらかじめ定義された経路を辿りますが、AMRは自由に移動可能な空間をインテリジェントにナビゲートします。したがって、以下の分析では、構造化シャトルシステムの真の技術的代替として、柔軟なAMRに焦点を当てます。.
AMR は動的な倉庫環境をどのように移動および操作し、自律的にタスクを実行するのでしょうか?
AMRの自律性と柔軟性は、マッピング、センサー、そしてインテリジェントソフトウェアの高度な相互作用に基づいています。このプロセスはいくつかのステップに分けられます。
- マッピング:AMRが作業を開始する前に、倉庫のデジタルマップを作成する必要があります。これは、ロボットを手動で操作して環境内を移動させ、データを収集する「オフライン」と、ロボットが動作中にリアルタイムでマップを作成・修正する「オンライン」のいずれかで行われます。.
- 自己位置推定(SLAM):AMRは、自身の位置を把握するために、SLAM(Simultaneous Localization and Mapping:同時自己位置推定と地図作成)と呼ばれる技術を採用しています。ロボットはセンサーからのデータを保存された地図と継続的に比較することで、自身の位置と向きをリアルタイムかつ高精度に特定します。.
- センサー: AMR には、周囲の 360 度全体を把握できるさまざまなセンサーが搭載されています。
- LiDAR(光検出・測距):レーザースキャナーは光パルスを発射し、その反射を測定することで、周囲の環境の正確な点群データを作成します。これは、遠くにある障害物をマッピングし、検知するための主要な技術です。.
- 3Dカメラ:視覚データと奥行き情報を取得し、物体認識能力を向上させます。また、床や棚に貼られたQRコードなどのマーキングを読み取ることで、精密な位置決めを行うためにもよく使用されます。.
- IMU (慣性計測装置): 加速度と回転速度を測定し、センサーの更新間でロボットが自身の動きを追跡できるようにする慣性計測システム。.
- ナビゲーションと障害物回避:フリートマネジメントシステムがAMRに目的地を割り当てます(例:「荷物ステーション5まで運転」)。ロボットは最適なルートを計算します。走行中はセンサーが経路を継続的に監視します。予期せぬ障害物を検知した場合、AMRは単に停止するのではなく、状況を分析し、目的地まで到達できるよう瞬時に迂回ルートを計画します。.
- 人工知能 (AI) と機械学習 (ML): 高度なアルゴリズムがバックグラウンドで動作し、センサーからの膨大な量のデータを解釈して、最も安全で効率的なルート計画を決定し、時間の経過に伴う継続的な学習を通じてロボットのナビゲーション パフォーマンスを向上させます。.
イントラロジスティクスの専門家

高層倉庫および自動保管システム向けの包括的なソリューションのコンサルティング、計画、実装 - 画像: Xpert.Digital
詳細はこちら:
シャトル vs. AMR: インテリジェント ロボットか従来のシャトル システムか?
直接システム比較 - 多次元分析
スループットと速度に関する直接的なパフォーマンス比較では、シャトル システムと AMR のパフォーマンスはどのようになりますか?
スループット (1 時間あたりの保存と取得など) によって測定されるパフォーマンスは、2 つのシステム哲学を区別する重要な特徴の 1 つです。.
シャトルシステムは、特定の環境下で極めて高いスループットを実現するために、徹底的に設計されています。そのアーキテクチャは、動作を並列化するように設計されています。数十台のシャトルがそれぞれの階層で同時に水平方向に移動する一方で、リフトは垂直方向に独立して動作します。このように水平方向と垂直方向の搬送経路を分離することで、極めて高いピークパフォーマンスを実現します。最先端のシステムは、1時間あたり1,000回以上のダブルサイクル(保管と取り出しを1回ずつ)のスループットを実現できます。これにより、シャトルシステムは、固定構造内で高頻度かつ反復的な保管・取り出し作業において、紛れもなく「スプリンター」と言えるでしょう。.
従来の自律移動ロボット(AMR)は、最小限のスペースで最大のスループットを実現することを主眼に置いて最適化されているわけではありません。その強みは、動的な環境下において、様々な距離、多くの場合長距離にわたって、柔軟かつ効率的に貨物を輸送できることにあります。1台のAMRは最大4m/sの速度に達することができますが、群全体のスループットは、ルートの複雑さ、他のロボットや人間の通行量、ステーション間の距離、そして全体的な発注構造など、多くの要因に左右されます。AMRは、変化する状況に適応する「マラソンランナー」のようなものです。.
しかし、前述の技術の融合は、ここでも顕著です。Exotec Skypodのような、クライミングロボットをベースとしたいわゆるキューブ型ストレージシステムは、AMRの柔軟性と非常に高いスループットを融合させるよう明確に設計されています。接続されたピッキングステーションでは、ステーションごとに最大400ピッキング/時というスループットを実現できます。こうしたハイブリッドなアプローチは、「シャトル=高スループット」と「AMR=高い柔軟性」という従来の二分法にますます挑戦しつつあります。.
これに関連して:


より高いストレージ密度を提供し、利用可能なスペースをより効率的に使用するシステムはどれですか?
ストレージ密度は伝統的に重要な議論であり、シャトルシステムの領域です。不動産価格と土地価格が高騰する世界において、容積利用率を最大化することは、経済にとって極めて重要な要素です。.
シャトルシステムは比類のない保管密度を実現します。通路数を最小限に抑え、建物の高さを最大30メートル以上まで活用することで、保管スペースを極めてコンパクトに抑えます。また、チャネル内にコンテナを二重または多層に収納するなどの技術により、限られた設置面積でさらに収容能力を最大化します。.
従来型のAMRは、間隔の広い棚間で商品を搬送するため、必然的に移動経路が広くなり、垂直方向のスペースを効率的に活用できません。AMRの最適化は、静的な保管密度ではなく、動的なプロセス効率に重点を置いています。.
しかし、この分野においても明確な境界線は曖昧になりつつあります。前述のキューブ型ストレージシステム(AutoStoreやExotec Skypodなど)は、棚を使わずにコンテナを直接積み重ね、ロボットが上から必要なコンテナにアクセスすることで、極めて高い保管密度を実現します。コンパクトな倉庫の密度とロボットの柔軟性を兼ね備えています。さらに発展したクライミングAMR(自動クライミングロボット、ACR)は、高さのある標準棚にも対応できるため、地上走行型の車両と比較して垂直方向のスペース利用率を大幅に向上させます。.
変化するビジネス要件や季節的なピークに関して、2 つのシステムはどの程度柔軟で拡張可能ですか?
柔軟性と拡張性は AMR の特徴であり、不安定な市場において AMR が使用される決定的な理由となることがよくあります。.
AMR は最大限の柔軟性と拡張性を提供します。
- 拡張性:注文量の増加への対応は驚くほど簡単です。スループットを向上させるには、既存のロボット群にロボットを追加するだけです。このプロセスは、業務を中断することなく、数分または数時間で完了します。保管容量は、スループット(つまりロボットの数)には全く依存せず、棚を追加することで拡張できます。.
- 柔軟性:AMRはソフトウェア定義です。新しいルート、ワークステーションの追加、あるいはプロセスフローの全面的な変更も、ソフトウェアアップデートによって即座に実装できます。システムは、物理的な変更を一切行わずに、新しい倉庫レイアウトや変化する要件に適応します。そのため、eコマースやサードパーティロジスティクス(3PL)など、注文量や構造が大きく変動する非常に動的な環境に最適なソリューションです。.
シャトル システムは伝統的にはるかに堅牢です。
- 拡張性:現代のシャトルシステムは原理的にはモジュール式で拡張可能ですが、そのプロセスははるかに複雑です。スループットを向上させるために通路にシャトルを追加したり、ラック通路全体を拡張して保管容量を拡張したりすることも可能です。しかし、このような拡張は大規模な建設プロジェクトであり、綿密な計画と多額の投資が必要となり、場合によっては一部または完全な運用停止が必要になります。.
- 柔軟性:ラック通路、レール、リフトといった基本的なインフラは固定されており、ピッキングゾーンの移転など、マテリアルフローの根本的な変更は非常に困難でコストもかかります。システムは特定の最適化されたプロセス向けに設計されているため、根本的な変更への適応が困難です。.
資本支出 (CAPEX)、運用経費 (OPEX)、実装時間の点でシステムはどのように異なりますか?
総所有コスト (TCO) と実装速度を分析すると、根本的に異なるビジネス モデルが明らかになり、投資決定にとって重要になります。.
- 初期投資(CAPEX):
- シャトルシステム:初期投資額は非常に高額です。車両本体だけでなく、高精度の鋼構造、強力なリフト、数キロメートルに及ぶコンベア技術、そして複雑な制御技術からなる大規模なインフラもコストに含まれます。.
- AMR:初期投資が大幅に削減されます。既存のインフラ内で動作するため、高額で複雑な改修は不要です。企業は数台のロボットからなる小規模なフリートから始め、事業の成長に合わせて投資額を徐々に調整することができます(「Pay-As-You-Grow(成長に合わせた投資)」)。ハードウェアをレンタルする「Robot-as-a-Service(RaaS)」などのモデルも定着しつつあり、CAPEX(設備投資)のハードルをさらに下げ、コストを変動運用費(OPEX)に転換できます。.
- 実施時間:
- シャトルシステム:シャトルプロジェクトの実施は、計画、製造、設置、試運転まで、数か月、あるいは数年かかることもある長期にわたるプロセスです。設置作業は、必然的に運用に大きな混乱をもたらします。.
- AMR:導入は非常に迅速です。環境をマッピングした後、ロボットは数日または数週間以内に稼働を開始でき、多くの場合、既存の業務と並行して稼働させることも可能です。この迅速な導入により、投資回収期間(ROI)が大幅に短縮され、多くの場合1年未満で実現可能です。.
- 運営費(OPEX):
- シャトルシステム:高い効率性と人員削減により、長期的には非常に費用対効果の高いシステムとなります。しかし、複雑なシステム全体の維持管理は困難で、費用もかさむ可能性があります。最新のシャトルは、従来の保管・回収機械に比べてエネルギー効率が大幅に向上しています。.
- AMR:ロボット1台あたりのメンテナンスコストは比較的低いですが、大規模な運用となると、メンテナンスとバッテリー管理にかかる全体的な労力を考慮する必要があります。最新のリチウムイオンバッテリーとインテリジェントな自動充電サイクルにより、エネルギー消費量と運用コストを抑えられます。.
これらの技術を支える財務モデルは、その技術的特性と同じくらい多様です。シャトルシステムは、高度な投資安全性と将来の需要の正確な予測を必要とする、従来型の長期的かつ大規模なプロジェクトです。一方、AMR、特にRaaSモデルは、機敏な資金調達と運用支出へのパラダイムシフトを象徴しています。AMRにより、企業は自動化を固定資産ではなく、拡張可能なサービスとして捉えることができます。この財務上の柔軟性は、多くの企業にとって技術そのものと同様に破壊的な変化をもたらし、中小企業が業界の大企業と競争できるようにすることで、高度な物流自動化へのアクセスを民主化します。.
基準の詳細な比較: シャトルシステムと自律移動ロボット (AMR)
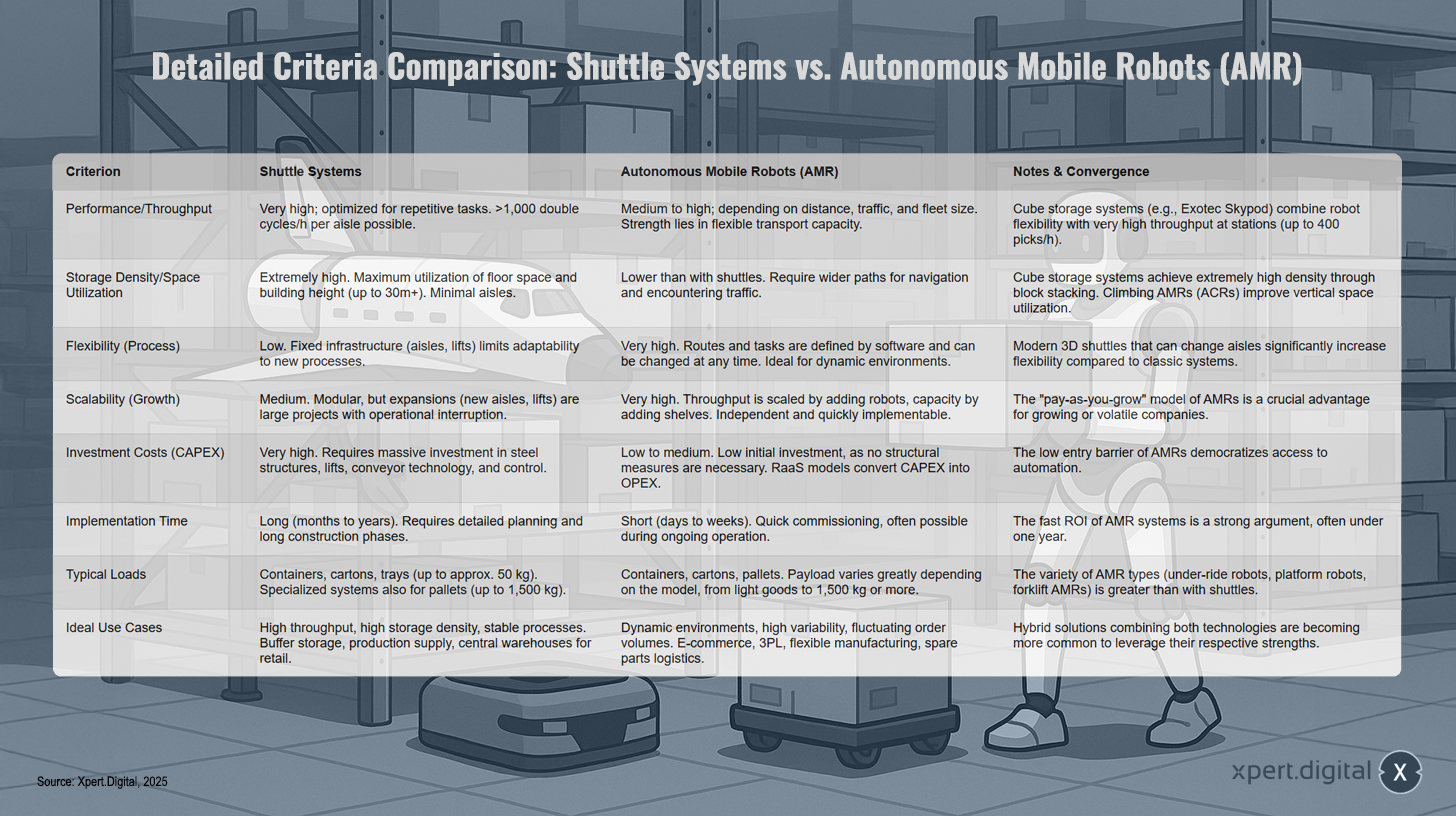
基準の詳細な比較:シャトルシステム vs. 自律移動ロボット(AMR) – 画像:Xpert.Digital
シャトルシステムと自律移動ロボット(AMR)を比較すると、倉庫技術における興味深い進歩が明らかになります。どちらのシステムにもそれぞれ長所と短所があり、用途に応じて適切な評価を行う必要があります。.
シャトルシステムは、1時間あたり1,000ダブルサイクルを超える極めて高いスループットと、高さ30メートルまでの最大スペース利用率を誇ります。安定した反復的な大量処理に最適です。しかし、投資コストは高額であり、固定されたインフラストラクチャによって柔軟性が制限されます。.
対照的に、自律移動ロボットはプロセスの柔軟性に優れています。経路とタスクはソフトウェアによって迅速に調整できるため、動的な環境に最適です。導入時間は短く、初期投資も大幅に抑えられます。キューブ型収納システムなどの最新のアプローチは、すでに両技術の融合を実証しています。.
シャトルシステムとAMRのどちらを選択するかは、具体的なビジネス要件によって異なります。シャトルシステムは高スループットとストレージ密度に理想的ですが、AMRは柔軟性と迅速な拡張性を求める方に適しており、両方のテクノロジーの利点を組み合わせたハイブリッドソリューションを選択する企業も増えています。.
オペレーションの頭脳 – ソフトウェア、制御、統合
シャトル システムの制御においてソフトウェアはどのような役割を果たし、既存の IT 環境 (WMS/WMS) にどのように統合されますか?
インテリジェントなソフトウェア層がなければ、シャトルシステムは単なる「ダムメタル」の集合体でしかありません。その真の潜在能力は、システムのデジタルブレインとの相互作用によってのみ発揮されます。この役割は通常、倉庫管理ソフトウェア(WMS)と、その基盤となるマテリアルフローシステム(MFS)または倉庫管理システム(WCS)の組み合わせによって実現されます。.
このソフトウェアのタスクは多岐にわたり、パフォーマンスにとって重要です。
- 倉庫ロケーション管理:ソフトウェアは、新しく入荷した商品に最適な保管場所をリアルタイムで決定します。基準としては、アクセス頻度(ABC分析)、注文ごとの商品のグループ化、通路の均等利用などが挙げられます。.
- 注文と順序管理:上位ERPシステムから注文を受け取り、ハードウェアの個別の輸送オーダーに分解します。これにより、下流工程(梱包など)に最適な順序でアイテムが取り出されるようになります。.
- ハードウェア制御:ソフトウェアはオーケストラの指揮者のような役割を果たします。個々のシャトル、リフト、そしてコンベアシステムの各セグメントに特定の移動コマンドを送信し、それらの動きを同期させることで、スムーズで効率的な材料の流れを確保します。.
- リアルタイム在庫管理:すべての動きが記録されるため、システムは秒単位の継続的な在庫管理を提供します。在庫レベルは常に100%透明です。.
既存のIT環境への統合が成功の鍵となります。WMS/MFSと企業のERP(エンタープライズ・リソース・プランニング)システムとのシームレスな連携が不可欠です。標準化されたインターフェース(API)は、注文データ、マスターデータ、在庫情報の交換を容易にし、顧客の注文から出荷までの継続的な情報フローを保証します。.
なぜ車両管理ソフトウェアは AMR に不可欠なのでしょうか。また、どのようなインテリジェントな AI ベースの機能を提供するのでしょうか。
WMSが物流プロセスの「何を」「いつ」行うかを定義する戦略レベルを表すとすれば、フリート管理ソフトウェアは、AMRフリートの「誰が」「どのように」をリアルタイムで決定する戦術的インテリジェンスです。単一のAMRは単なるツールであり、集中管理のないフリートは完全な混乱に陥るでしょう。.
車両管理ソフトウェアは不可欠であり、さまざまな高度にインテリジェントな機能を提供します。
- 交通管理:航空管制と同様に、このソフトウェアは倉庫内のすべてのロボットのルートを調整します。衝突を防止し、交差点での通行権を規制し、交通の流れを動的に制御することで渋滞を防止します。.
- インテリジェントなタスク割り当て:WMSから新しい輸送オーダーを受信すると、フリート管理ソフトウェアがタスクに最適なロボットを決定します。AIベースのアルゴリズムは、ロボットの現在位置、バッテリーの充電レベル、現在の作業負荷、オーダーの優先度など、さまざまな要素をリアルタイムで考慮します。.
- AIベースのルート計画:このソフトウェアは、最短ルートだけでなく、最も効率的なルートも計算します。交通渋滞を予測して回避したり、道路が通行止めになった場合に代替ルートを探したり、車両全体の資材フローを最適化して輸送時間を最小限に抑えたりすることができます。.
- 周辺機器の統合:現代のフリートマネージャーは、ロボット自体を制御するだけでなく、ロボットと周囲の環境との相互作用も調整します。ゲートを自動的に開閉したり、エレベーターを呼び出したり、ロボットアームやベルトコンベアへの商品の搬送を調整したりすることも可能です。.
- 自動エネルギー管理: ソフトウェアは各ロボットの充電レベルを監視し、バッテリーレベルが低くなると、24 時間 365 日の動作を確保するために、ロボットを適切なタイミングで最も近い利用可能な充電ステーションに自動的に送信します。.
重要な進歩の一つは、VDA 5050のようなメーカーに依存しない通信規格の開発です。この規格をサポートするフリートマネージャーは、異なるメーカーの車両で構成される異機種混在のフリートを管理できます。これにより、企業はそれぞれのタスクに最適なロボットを自由に選択できるようになり、単一サプライヤーへの長期的な依存(「ベンダーロックイン」)を回避できます。.
これらの複雑なシステムを既存の運用プロセスに相互運用性とシームレスな統合を実現する上での最大の課題は何でしょうか?
高度な自動化ソリューションの導入は、単なる技術の枠をはるかに超えた複雑な取り組みです。課題は、技術的な側面と組織的な側面に分けられます。.
- 技術的な課題:
- システムの互換性とインターフェース:最大の技術的ハードルは、ERP、WMS、MFS、フリート管理といった異なるソフトウェアレイヤー間のシームレスな通信を確保することです。そのため、システム間の通信を可能にするために、特別なミドルウェアの使用や、カスタマイズされたアプリケーション・プログラミング・インターフェース(API)の複雑な開発が必要になることがよくあります。.
- データの調和: ERP システムからの注文が最終的に倉庫内での正しい物理的な移動につながるように、データ形式とプロトコルはシステム間で正しく「変換」され、標準化される必要があります (データ マッピング)。.
- ネットワークインフラ:特にAMRは、極めて安定性、包括性、そして高性能なWi-Fi接続に依存しています。多くの既存の倉庫では、ネットワークがこれらの要件に対応しておらず、高額なアップグレードが必要になります。.
- セキュリティ:統合では、物理的セキュリティとデジタルセキュリティの両方を保証する必要があります。これには、緊急停止回路や防火システムなどの既存のセキュリティシステムへの接続に加え、車両全体を麻痺させる可能性のあるサイバー攻撃からネットワーク全体を保護することが含まれます。.
- 組織上の課題:
- 従業員の受容と変革管理:ロボット導入は、従業員の間で失業への不安を引き起こす可能性があります。そのため、プロジェクトを成功させるには、オープンなコミュニケーション戦略、従業員の早期の関与、そして機械の操作に必要な新しいスキル(例:車両監視、メンテナンス)を育成するための包括的な研修プログラムが必要です。.
- プロセス・リエンジニアリング:最大の投資収益率は、単に人間を機械に置き換えるだけでは得られません。真の成功は、自動化の独自の機能を最大限に活用するために、プロセスチェーン全体を根本的に再設計することにあります。そのためには、ワークフロー、パフォーマンス指標、そして経営理念の見直しが必要です。.
- 初期投資:メリットはあるものの、特に包括的なシャトルシステムの場合、コストは多くの中規模企業にとって大きな障壁となります。小規模なパイロットプロジェクトから始める、段階的に拡張する、RaaSファイナンスモデルを活用するなどの戦略が、この障壁を克服するのに役立ちます。.
経験から、最大の課題は技術的なものではなく、組織的なものであることが多いことが分かっています。自動化プロジェクトは単なるITプロジェクトではなく、抜本的なビジネス変革プロジェクトです。新しいテクノロジーを古い手動プロセスに「プラグイン」するだけでは、その潜在能力を最大限に引き出すことはできません。テクノロジーを触媒として活用し、オペレーションモデル全体を再構築する企業が勝利を収めるでしょう。.
🎯🎯🎯 Xpert.Digitalの5つの専門知識を1つの包括的なサービスパッケージで活用しましょう | BD、R&D、XR、PR、デジタル可視性の最適化


Xpert.Digitalの5つの専門知識を包括的サービスパッケージで活用 | R&D、XR、PR、デジタル可視性の最適化 - 画像: Xpert.Digital
Xpert.Digitalは、様々な業界にわたる深い知識を有しています。これにより、お客様の特定の市場セグメントのニーズと課題に的確に合致した、カスタマイズされた戦略を策定することができます。市場トレンドを継続的に分析し、業界の動向をモニタリングすることで、先を見越した行動を取り、革新的なソリューションを提供することができます。経験と専門知識を組み合わせることで付加価値が生まれ、お客様に決定的な競争優位性を提供します。.
詳細はこちら:
シャトル vs. AMR – ハイブリッド システム: 今後 10 年間の物流成功の鍵となるか?
市場、プレーヤー、将来の動向
現在の市場状況はどのようなもので、倉庫自動化にはどのような成長予測がありますか?
倉庫自動化市場は、eコマース、オムニチャネル小売、そして世界的な労働力不足といった不可逆的なトレンドに牽引され、爆発的な成長を遂げています。データは、この業界が成長を遂げている明確な姿を描き出しています。
- 市場規模と成長:世界市場は2024年に265億米ドルに達すると推定されています。予測では、2034年までの期間における年平均成長率(CAGR)は15.9%を超える高い成長が見込まれています。特に欧州では、2024年の49億米ドルから2029年には95億9000万米ドルへと成長し、年平均成長率(CAGR)は14.4%に達すると見込まれています。北米でも同様の傾向が見られ、米国市場は2030年までに2倍以上に拡大すると予測されています。.
- 市場浸透率:これらの目覚ましい成長率にもかかわらず、その潜在能力はまだ尽きたわけではありません。現在、世界中の倉庫のうち高度に自動化されているのはわずか5%程度と推定されています。さらに15%はベルトコンベアなどの部分的なソリューションを採用していますが、圧倒的多数の80%は依然として大部分が手動で操作されています。この自動化レベルの低さは、シャトルシステムやAMRなどの技術の将来的な大きな成長の可能性を示しています。.
- 地域別注力分野:ヨーロッパ、特にドイツは、世界有数のロボット密度を誇り、OEMやシステムインテグレーターにとってのホットスポットとなっています。同時に、中央ヨーロッパおよび東ヨーロッパは、将来的に急成長が見込まれる市場と考えられています。米国、特に中規模企業においては、自動化への追い上げが強く求められており、これが同地域の力強い成長を牽引しています。.
これに関連して:


シャトルおよび AMR システムの主要プロバイダーはどの企業ですか?
競争環境は多様化しています。シャトルシステム分野では、大手の老舗イントラロジスティクスプロバイダーが優勢を占め、多くの場合、完全なターンキーソリューションを提供しています。一方、AMR市場はよりダイナミックで細分化されており、既存の産業企業と、高度に専門化された機敏なロボット工学のスタートアップ企業が混在しています。.
- シャトル システムの主要プロバイダー (多くの場合、全体的なソリューションの一部として):
- 大福 (日本)
- SSIシェーファー(ドイツ)
- Dematic(ドイツのKionグループ傘下)
- ナップ(オーストリア)
- TGWロジスティクスグループ(オーストリア)
- ヴァンダーランデ (オランダ、豊田自動織機の一部)
- Mecalux(スペイン)
- Swisslog(スイスのKUKA AG傘下)
- WITRON Logistics + Informatics(ドイツ)
- AMRシステムの主要プロバイダー(専門分野による選択):
- 物品対人輸送 / クライミングロボット: Exotec (フランス)、Geek+ (中国)、Hai Robotics (中国)。.
- 人対物 / 協働ロボット: Locus Robotics (米国)、Mobile Industrial Robots (MiR、Teradyne 傘下、デンマーク)。.
- 産業用 AMR およびフリート管理: KUKA (ドイツ)、ABB (スイス/スウェーデン)、DS AUTOMOTION (SSI Schäfer の一部、オーストリア)。.
全体的に、市場集中度は「中程度」と評価されており、これはプレーヤー間の健全かつ革新主導の競争を示しています。.
ハイブリッド システム、AI、協働ロボットなどのどのような技術トレンドが次世代の倉庫システムを形作るのでしょうか?
倉庫自動化の開発は絶えず進化しています。いくつかの重要なトレンドが次世代のシステムを決定づけ、今日の可能性の限界をさらに押し広げるでしょう。.
- ハイブリッドシステムと融合:異なるシステム間の厳格な分離は解消されつつあります。未来は、それぞれの強みをインテリジェントに組み合わせた統合型ハイブリッドソリューションにあります。典型的なシナリオとしては、高密度シャトルまたはキューブ型ストレージシステムを倉庫に使用し、それを柔軟な自動誘導車両(AGV)に接続して、分散型の人間工学に基づいたピッキングステーションや、複数の保管・生産エリア間で商品を搬送します。これにより、固定されたコンベア技術を回避し、密度と柔軟性の両方を最大限に高めることができます。.
- ユビキタスな人工知能(AI)と機械学習(ML):AIはニッチな機能から、倉庫管理全体に不可欠な要素へと進化しています。無人搬送車(AGV)の単純なルート計画にとどまらず、AIはグローバルなプロセス最適化にも活用されています。例えば、需要のピークを予測し、リソースを積極的に調整する予測分析、予測された注文に基づいて商品を動的に再配置するインテリジェントな在庫最適化、運用データを分析することでシステム全体を継続的に改善する適応型学習アルゴリズムなどが挙げられます。.
- 人間とロボットの協働とコボット:倉庫から人間が消えることはありませんが、その役割は肉体労働から監視、制御、そして問題解決へと移行します。協働ロボット(コボット)と自動誘導車両(AGV)は、人間と並んで安全かつ効率的に作業するために開発されています。人間と機械が協力して注文品をピッキングする、人間工学に基づいた「Goods-to-Person(商品から人へ)」または「Goods-to-Robot(商品からロボットへ)」ワークステーションが標準になりつつあります。.
- モノのインターネット(IoT)と完全なコネクティビティ:未来の倉庫は完全にネットワーク化されています。棚、機械、ロボット、そして積載ユニット自体に搭載されたセンサーが、リアルタイムのデータを絶えず提供します。このデータはAIシステムによって活用され、倉庫のデジタルツインを作成し、かつてない精度で物理プロセスを制御・最適化します。.
- 持続可能性とエネルギー効率:エネルギーコストの上昇と社会的圧力を踏まえ、持続可能性は重要な設計基準となりつつあります。相互にエネルギーを供給できるAutoStoreのロボットや、エネルギー効率の高いシャトルドライブなど、エネルギー消費量が少ないシステムの重要性が高まっています。最適化された返品プロセスを通じて循環型経済を促進することも、重要な側面となりつつあります。.
イントラロジスティクスの将来動向とその影響
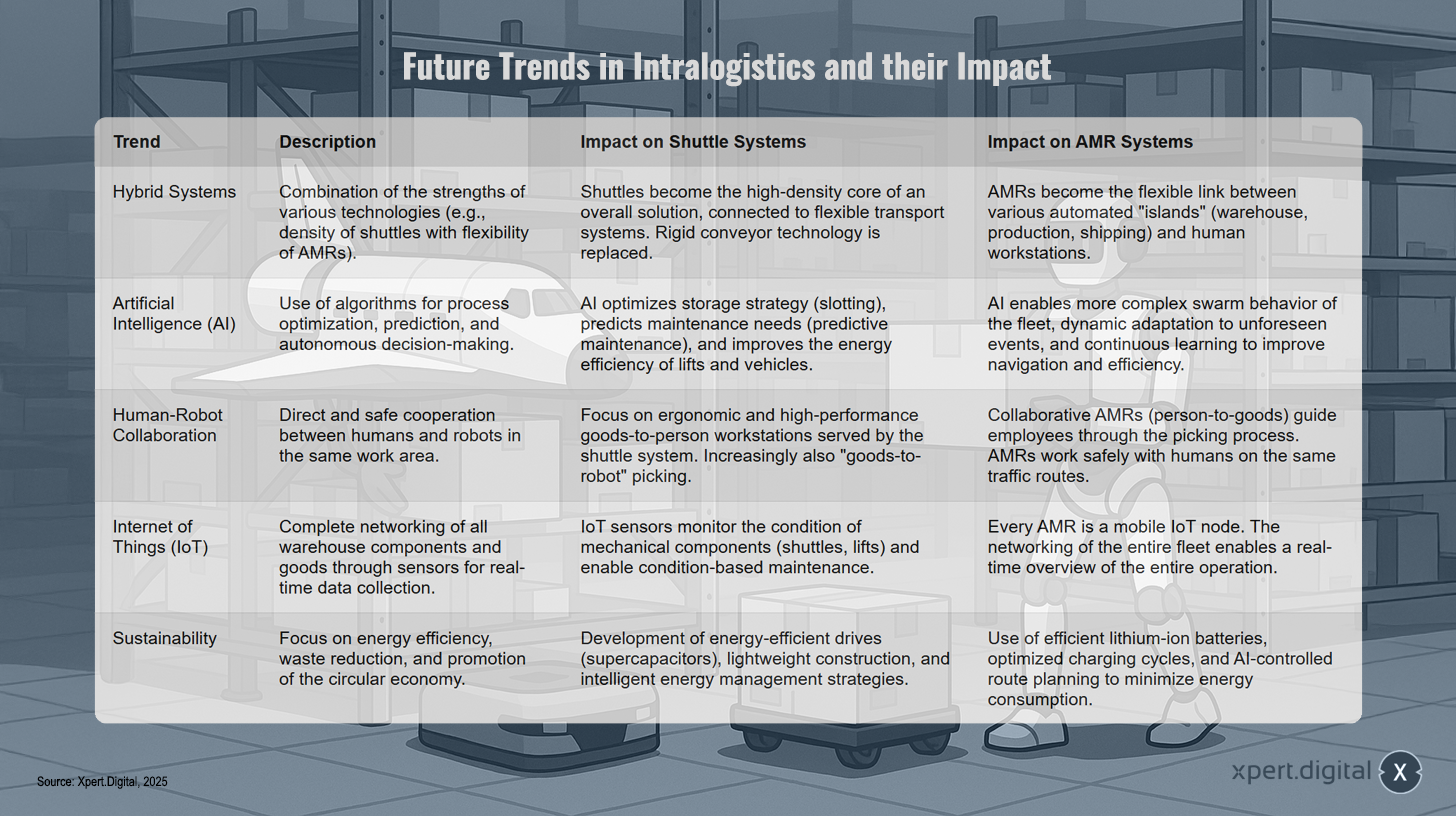
イントラロジスティクスの将来動向とその影響 – 画像: Xpert.Digital
イントラロジスティクスの未来は、物流システムのパフォーマンスと効率に革命をもたらすいくつかの重要なトレンドによって形作られるでしょう。ハイブリッドシステムは、様々な技術の長所を組み合わせた重要な戦略です。シャトルシステムは包括的なソリューションの高密度な中核を形成し、自律移動ロボット(AMR)は異なる自動化エリア間の柔軟なリンクとして機能します。.
人工知能(AI)はプロセス最適化において重要な役割を果たします。在庫管理戦略の改善や予知保全だけでなく、ロボット群のより複雑な群行動も可能にします。ロボットが人間の従業員と安全かつ人間工学的に連携して作業を行う、人とロボットの協働はますます重要になっています。.
モノのインターネット(IoT)は、倉庫内のあらゆるコンポーネントをリアルタイムで接続し、包括的な透明性を実現します。すべてのロボットがモバイルデータハブとなり、情報の交換と分析を行います。同時に、持続可能性の重要性も高まっています。エネルギー効率の高い駆動装置、最適化されたバッテリー技術、そしてAIを活用したルートプランニングは、イントラロジスティクスにおける環境負荷の最小化を目指しています。.
これらの傾向は、イントラロジスティクスの将来が、ネットワーク化、インテリジェンス、持続可能性を特徴とし、人間とテクノロジーがこれまで以上に密接に連携するようになることを示しています。.
競争ではなく共存 ― 将来を支配するのはどのシステムでしょうか?
したがって、1 つのシステムが他のシステムに取って代わることになるのでしょうか、それとも、共存とハイブリッド ソリューションの未来に向かっているのでしょうか。
技術、その性能特性、コスト構造、そして将来のトレンドを詳細に分析した結果、一つのことが明らかになりました。「シャトル vs. ロボット」という問いは、どちらかのシステムが他方に置き換わることを意味するのであれば、誤った問いです。単一の技術が全てを支配するという考えは、よりシンプルな時代の遺物です。倉庫自動化の未来は、単一の勝者によって形作られるのではなく、アプリケーションに特化したインテリジェントな共存と、技術の融合によって形作られるのです。.
完全な置き換えは起こりません。むしろ、それぞれのコアとなる強みが最も活かされる応用分野において、それぞれのシステムが普及していくでしょう。
- シャトルシステム(およびキューブストレージなどのさらなる発展形)は、最大限の保管密度と極めて高い予測可能なスループットが決定的な基準となる用途において、今後も主流であり続けるでしょう。これは、産業におけるバッファストレージ、高性能生産ラインの供給、食品小売業における大規模中央倉庫、あるいはeコマースのフルフィルメントにおける高回転商品の保管などに適用されます。.
- 自律移動ロボット(AMR)は、柔軟性、迅速な拡張性、そして動的なプロセスへの適応性が極めて重要となるあらゆる分野で優位性を発揮するでしょう。これには、注文プロファイルが大きく変動する不安定なeコマース環境、顧客や要件が頻繁に変化するサードパーティロジスティクス(3PL)、そして柔軟なモジュール型生産コンセプトなどが含まれます。.
しかし、最も重要かつ決定的なトレンドは、テクノロジーの融合とハイブリッドシステムの出現です。未来の最も効率的な物流センターは、シャトルやAMRのいずれかに依存せず、両方の長所を組み合わせた統合型かつ包括的なソリューションを基盤とします。したがって、特定のハードウェア技術が優位に立つことはありません。イントラロジスティクスの未来をめぐる競争において真の勝者は、ソフトウェア・エコシステムです。シャトル、AMR、コボット、コンベア技術、手動ワークステーションといった異機種混在のテクノロジーをシームレスに統合し、高効率、柔軟、かつレジリエンスの高いシステムを構築できるインテリジェンスこそが、決定的な競争優位性となるでしょう。.
産業の将来は、インテリジェントで柔軟性のあるハイブリッドな自動化エコシステムが主流となり、特定のタスクに適したハードウェアの選択と、優れたソフトウェアによる完璧な統合が成功を左右することになります。.


Xpert.Plus 倉庫最適化 - 高床式倉庫とパレット倉庫:コンサルティングと計画
コンサルティング、計画、実装、プロジェクト管理など、あらゆる面でサポートいたします。
☑️ 当社のビジネス言語は英語またはドイツ語です。
☑️ 新機能: 母国語での対応!

Konrad Wolfenstein
私と私のチームは、あなたの個人アドバイザーとして喜んでお手伝いさせていただきます。.
こちらの問い合わせフォームにご記入いただくかwolfenstein@xpert.digital。、 +49 7348 4088 965までお電話ください。メールアドレスはです
私たちの共同プロジェクトを楽しみにしています。.