Robotica tattile: Robot con il senso del tatto: la nuova generazione di Vulcan e la ricerca del MIT sul riconoscimento tattile degli oggetti – Immagine: Xpert.Digital
Il sistema di riconoscimento degli oggetti del MIT senza sensori speciali e il robot Vulcan di Amazon
Percezione tattile per le macchine: stabilire nuovi standard nel riconoscimento degli oggetti
Nel campo della robotica, lo sviluppo di sensori tattili e sistemi di riconoscimento rappresenta un progresso cruciale, consentendo per la prima volta alle macchine non solo di vedere l'ambiente circostante, ma anche di "sentirlo". Questo sviluppo è esemplificato dal nuovo robot Vulcan di Amazon e dall'innovativo sistema di riconoscimento degli oggetti del MIT. Entrambe le tecnologie ampliano significativamente le applicazioni dei robot e permettono di svolgere compiti che in precedenza potevano essere eseguiti solo dagli esseri umani con la loro naturale percezione aptica.
Correlato a questo:


Il robot Vulcan di Amazon: una svolta nel campo della presa tattile dei robot
Fondamenti funzionali e tecnologici
Il robot Vulcan, sviluppato da Amazon, rappresenta un significativo progresso tecnologico nel campo dell'intelligenza artificiale applicata al mondo fisico. Amazon stessa descrive lo sviluppo come una "svolta nella robotica e nell'IA fisica". Il sistema è composto da due componenti principali: "Stow" per immagazzinare gli oggetti e "Pick" per prelevarli. La sua caratteristica distintiva è la capacità di percepire l'ambiente circostante attraverso il tatto.
La base tecnologica delle capacità tattili di Vulcan consiste in speciali sensori di forza e coppia, a forma di disco da hockey, che permettono al robot di "percepire" quanta forza può applicare per afferrare un oggetto senza danneggiarlo. Adam Parness, Direttore dell'IA robotica di Amazon, sottolinea l'unicità di questo approccio: "Vulcan non è il nostro primo robot in grado di spostare oggetti. Ma con il suo senso del tatto, ovvero la sua capacità di capire quando e come entra in contatto con un oggetto, apre nuove possibilità per ottimizzare flussi di lavoro e impianti.".
Per smistare gli oggetti sugli scaffali, Vulcan utilizza uno strumento simile a un righello attaccato a una piastra per capelli. Con questo "righello", sposta gli altri oggetti per fare spazio a quelli nuovi. I bracci prensili regolano la loro forza di presa a seconda delle dimensioni e della forma dell'oggetto, mentre dei nastri trasportatori integrati spingono l'oggetto nel contenitore. Per prelevare gli oggetti, Vulcan utilizza una pinza a ventosa in combinazione con un sistema di telecamere.
Aree di applicazione e prestazioni attuali
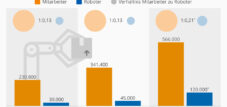
Il robot Vulcan è attualmente in fase di test in due centri logistici di Amazon: a Winsen, vicino ad Amburgo (Germania) e a Spokane, Washington (USA). A Washington, sei robot Stow Vulcan sono in funzione e hanno già stoccato con successo mezzo milione di articoli. A Winsen, due robot Pick Vulcan sono operativi e hanno già elaborato 50.000 ordini.
Le capacità del sistema sono notevoli: Vulcan è attualmente in grado di gestire circa il 75% dei milioni di prodotti offerti da Amazon. La dimensione minima degli oggetti che il robot può manipolare è all'incirca equivalente a un rossetto o a una chiavetta USB. Particolarmente impressionante è la capacità del robot di identificare gli oggetti in tempo reale, poiché sarebbe "impossibile per lui conoscere a memoria tutte le caratteristiche specifiche degli articoli", come spiega Parness.
Progetti futuri e integrazione nella catena logistica
Amazon prevede di aumentare significativamente il numero di robot Vulcan nei prossimi anni. Quest'anno, si prevede che il numero di Vulcan a Winsen salirà a 60 e a Washington a 50. Il piano a lungo termine prevede di distribuire i robot nei centri logistici in tutta Europa e negli Stati Uniti.
Un aspetto fondamentale della strategia di Amazon è la coesistenza tra esseri umani e macchine. Il "piano strategico" dell'azienda prevede che uomini e macchine lavorino fianco a fianco. I robot sono principalmente destinati a movimentare quei prodotti sugli scaffali che gli esseri umani non possono raggiungere senza una scala o che richiederebbero di piegarsi eccessivamente. Si prevede che ciò porti a una maggiore efficienza complessiva, riducendo al contempo il carico di lavoro dei dipendenti.
Sistema di rilevamento di oggetti tramite manipolazione del MIT: "Rilevamento" intelligente senza sensori speciali
Approccio innovativo al riconoscimento degli oggetti
Parallelamente al Vulcan di Amazon, i ricercatori del MIT, di Amazon Robotics e dell'Università della British Columbia hanno sviluppato un sistema che adotta un approccio diverso per dotare i robot di capacità tattili. Questa tecnologia consente ai robot di riconoscere le proprietà di un oggetto, come il peso, la morbidezza o il contenuto, semplicemente sollevandolo e scuotendolo delicatamente, proprio come fanno gli esseri umani quando maneggiano oggetti sconosciuti.
La particolarità di questo approccio è che non richiede sensori tattili specifici. Il sistema utilizza invece gli encoder articolari già presenti nella maggior parte dei robot, sensori che rilevano la posizione e la velocità di rotazione delle articolazioni durante il movimento. Peter Yichen Chen, ricercatore post-dottorato al MIT e autore principale dell'articolo, spiega la visione alla base del progetto: "Il mio sogno sarebbe quello di mandare i robot nel mondo in modo che possano toccare e spostare oggetti e scoprire autonomamente le proprietà di tutto ciò con cui interagiscono".
Funzionalità tecnica e modelli di simulazione
Il nucleo del sistema del MIT è costituito da due modelli di simulazione: uno che simula il robot e i suoi movimenti e uno che replica le dinamiche dell'oggetto. Chao Liu, un altro ricercatore post-dottorato del MIT, sottolinea l'importanza di questi gemelli digitali: "Una replica digitale accurata del mondo reale è davvero essenziale per il successo del nostro metodo".
Il sistema utilizza una tecnica chiamata "simulazione differenziabile", che consente all'algoritmo di prevedere come piccole variazioni nelle proprietà di un oggetto, come la massa o la morbidezza, influenzeranno la posizione finale delle articolazioni del robot. Una volta che la simulazione corrisponde ai movimenti reali del robot, il sistema ha identificato le proprietà corrette dell'oggetto.
Un vantaggio fondamentale di questo metodo è la sua efficienza: l'algoritmo può eseguire i calcoli in pochi secondi e richiede solo una traiettoria di movimento reale del robot per funzionare. Questo rende il sistema particolarmente conveniente e pratico per applicazioni reali.
Potenziale applicativo e vantaggi
La tecnologia sviluppata potrebbe rivelarsi particolarmente utile in applicazioni in cui le telecamere sono meno efficaci, come ad esempio la selezione di oggetti in uno scantinato buio o la rimozione di detriti in un edificio parzialmente crollato dopo un terremoto.
Poiché l'algoritmo non richiede un ampio set di dati per l'addestramento, a differenza di alcuni metodi che si basano sulla visione artificiale o su sensori esterni, è meno soggetto a errori quando si confronta con ambienti sconosciuti o nuovi oggetti. Questo rende il sistema particolarmente robusto e versatile.
Il più ampio panorama della ricerca sui sensori tattili nella robotica
Sfide fondamentali e soluzioni attuali
Lo sviluppo di robot dotati di senso del tatto pone ai ricercatori sfide fondamentali. Mentre il sistema tattile umano è estremamente complesso e ricco di sfumature, i sistemi artificiali devono replicarlo utilizzando mezzi tecnologici. Ken Goldberg, esperto di robotica presso l'Università della California, Berkeley, sottolinea la complessità di questo compito: "Il senso del tatto umano è incredibilmente ricco di sfumature e complesso, con una vasta gamma dinamica. Sebbene i robot stiano facendo rapidi progressi, sarei sorpreso di vedere sensori tattili a un livello umano nei prossimi cinque o dieci anni".
Nonostante queste sfide, la ricerca sta compiendo progressi significativi. Ad esempio, il Fraunhofer IFF sta sviluppando sistemi di sensori tattili che consentono una presa reattiva, imitando la mano umana e ideali per la manipolazione di oggetti fragili o flessibili. I dati dei sensori vengono utilizzati per l'adattamento della pinza, il riconoscimento dei componenti e della posizione e il monitoraggio dei processi.
Progetti di ricerca innovativi nel campo della robotica tattile
Oltre agli sviluppi di Amazon e MIT, ci sono altri importanti progetti di ricerca nel campo dei sensori tattili per robot:
L'Istituto Max Planck per i Sistemi Intelligenti ha sviluppato un sensore aptico chiamato Insight, in grado di rilevare il tocco con elevata sensibilità. Georg Martius, responsabile di un gruppo di ricerca presso l'istituto, sottolinea le prestazioni del sensore: "Il nostro sensore dimostra prestazioni eccezionali grazie all'innovativo design meccanico del suo involucro, al sistema di imaging interno progettato su misura, all'acquisizione automatica dei dati e ai metodi di deep learning all'avanguardia". Il sensore è così sensibile da poter persino percepire il proprio orientamento rispetto alla gravità.
Un altro progetto interessante è DensePhysNet, un sistema che esegue attivamente una sequenza di interazioni dinamiche (ad esempio, scivolamenti e collisioni) e utilizza un modello predittivo approfondito sulle sue osservazioni visive per apprendere rappresentazioni dense, pixel per pixel, che riflettono le proprietà fisiche degli oggetti osservati. Esperimenti sia in simulazione che in ambienti reali dimostrano che le rappresentazioni apprese contengono ricche informazioni fisiche e possono essere utilizzate direttamente per decodificare proprietà fisiche degli oggetti come attrito e massa.
Correlato a questo:

Prospettive future per i sistemi robotici tattili
Integrazione di sistemi di sensori multimodali
Il futuro della robotica tattile risiede nell'integrazione di diverse modalità sensoriali. I ricercatori del MIT stanno già lavorando per insegnare all'intelligenza artificiale a combinare sensi come la vista e il tatto. Comprendendo come queste diverse modalità sensoriali interagiscono, i robot possono sviluppare una comprensione più olistica del loro ambiente.
Il team del MIT sta già pianificando di combinare il proprio metodo di rilevamento degli oggetti con la visione artificiale per creare un sistema di sensori multimodale ancora più potente. "Questo lavoro non mira a sostituire la visione artificiale. Entrambi i metodi hanno i loro vantaggi e svantaggi. Ma qui abbiamo dimostrato che possiamo già identificare alcune di queste proprietà anche senza una telecamera", spiega Chen.
Aree di applicazione ampliate e sviluppi futuri
I ricercatori del team del MIT intendono inoltre esplorare applicazioni con sistemi robotici più complessi, come i robot morbidi, e oggetti più complessi, tra cui liquidi che si muovono o mezzi granulari come la sabbia. A lungo termine, sperano di utilizzare questa tecnica per migliorare l'apprendimento dei robot, consentendo ai robot del futuro di sviluppare rapidamente nuove capacità di manipolazione e di adattarsi ai cambiamenti del loro ambiente.
Amazon prevede di sviluppare e implementare ulteriormente la tecnologia Vulcan su larga scala nei prossimi anni. L'integrazione di Vulcan con l'attuale flotta aziendale di 750.000 robot mobili suggerisce un concetto di automazione completo che potrebbe trasformare radicalmente il settore della logistica.
Apprendimento tattile: quando i sensori danno ai robot il senso del tatto
Lo sviluppo di robot dotati di senso del tatto, esemplificato da Vulcan di Amazon e dal sistema di riconoscimento degli oggetti del MIT, segna una svolta cruciale nella robotica. Queste tecnologie consentono ai robot di svolgere compiti che in precedenza erano di esclusiva competenza umana, poiché richiedono capacità motorie fini e comprensione tattile.
I diversi approcci – l'attenzione di Amazon sui sensori specializzati e l'idea del MIT di utilizzare sensori esistenti per l'inferenza tattile – dimostrano la diversità degli orientamenti di ricerca in questo campo. Entrambi gli approcci hanno i loro punti di forza e ambiti di applicazione specifici.
Con la crescente integrazione delle capacità tattili nei sistemi robotici, si aprono nuove opportunità per l'automazione di compiti complessi nella logistica, nella produzione, nella sanità e in molti altri settori. La capacità dei robot non solo di vedere, ma anche di "sentire" l'ambiente circostante, ci avvicina significativamente a un futuro in cui robot e umani potranno collaborare in modo ancora più stretto e intuitivo.
Correlato a questo: