
Ingázó vs. robot | Ingázó rendszerek vs. autonóm robotok: A jövő domináns raktári rendszereinek átfogó elemzése
Xpert előzetes kiadás

Available in 27 languages 📢
Az Xpert.Digital előnyben részesítése a Google-benⓘMegjelent: 2025. július 19. / Frissítve: 2025. július 19. – Szerző: Konrad Wolfenstein

Automatizált raktár robotokkal – Kép: Xpert.Digital
Autonóm robotok vagy transzfer rendszerek? Transzformatív raktártechnológia: Melyik stratégia biztosít versenyelőnyt a vállalatok számára?
Az automatizálás forradalma az intralogisztikában
Az intralogisztika, a modern gazdaság idegrendszere, mélyreható átalakuláson megy keresztül. Az a kérdés, hogy melyik raktárrendszer fogja uralni a jövőt – a strukturált, áteresztőképességre optimalizált ingajárat-rendszer vagy a rugalmas, autonóm robot –, sokkal több, mint egy technikai vita. Kulcsfontosságú stratégiai döntéssé vált, amely meghatározza a vállalatok versenyképességét, ellenálló képességét és jövőbeli életképességét egy egyre ingatagabb világban.
Alkalmas:

Miért olyan kulcsfontosságú a „repülőgép kontra robot” vita a mai ipar jövője szempontjából?
Három alapvető erő hajtja kérlelhetetlenül ezt a fejlődést.
- Először is, az e-kereskedelem exponenciális növekedése örökre újraértelmezte az ügyfelek elvárásait. Az azonnali elérhetőség, az aznapi kiszállítás és a hibamentes rendelésfeldolgozás iránti igény óriási nyomást gyakorol a raktárakra és az elosztóközpontokra.
- Másodszor, a képzett és általános munkaerő tartós hiánya számos iparosodott országban drámaian súlyosbítja a helyzetet. A képzett személyzet megtalálása és megtartása az ismétlődő és fizikailag megterhelő raktári munkákhoz az egyik legnagyobb működési akadálytá válik.
- Harmadszor, a növekvő üzemeltetési, energia- és ingatlanköltségek arra kényszerítik a vállalatokat, hogy hatékonyabban használják ki a tereiket, és a legapróbb részletekig optimalizálják a folyamatokat.
Ezzel a háttérrel az automatizálás már nem lehetőség, hanem szükségszerűség. A globális raktárautomatizálási piac tükrözi ezt a sürgősséget: a 2024-es becsült 26,5 milliárd dolláros értékkel és a 2034-ig várhatóan több mint 15,9%-os összetett éves növekedési ütemmel (CAGR) ez az egyik legdinamikusabb technológiai szektor. Figyelemre méltó azonban, hogy e gyors növekedés ellenére a világ összes raktárának mintegy 80%-a még mindig túlnyomórészt manuálisan működik. Ez a hatalmas kiaknázatlan potenciál képezi azt a csatateret, ahol az ingajárati rendszerek és az autonóm mobil robotok (AMR-ek) versengenek a dominanciáért.
E két technológiai filozófia közötti választás a vállalat stratégiai irányáról szóló döntés. Ez a modern ellátási láncokban rejlő alapvető feszültséget tükrözi: a költséghatékonyság iránti igény, amelyet a nagymértékben optimalizált, kiszámítható folyamatok révén érnek el, és az agilitás iránti igény, amelyet a maximálisan alkalmazkodó, rugalmas működés biztosít. Az ingajárati rendszerek a strukturált hatékonyság fizikai megtestesítői, amelyeket a maximális tárolási sűrűség és a legnagyobb áteresztőképesség érdekében terveztek egy fix infrastruktúrán belül. Az automatizált ingajárati rendszerek (AMR) ezzel szemben az adaptív rugalmasságot testesítik meg, amelyeket a dinamikus, folyamatosan változó környezetekben való eligazodásra hoztak létre. Egy ingajárati rendszerbe befektető vállalat egy olyan jövőre fogad, ahol a termékkínálata és a rendelési szerkezete elég stabil ahhoz, hogy profitáljon ebből a szélsőséges optimalizálásból. Egy automatizált ingajárati rendszereket választó vállalat egy változékonysággal és kiszámíthatatlansággal teli jövőre számít, ahol a gyors alkalmazkodás képessége a döntő versenyelőny. A technológiai döntés így a vállalat saját piacára vonatkozó stratégiai előrejelzésének tükröződésévé válik.
Az alapvető technológiák meghatározása és működése
Mit jelent pontosan egy ingajárati rendszer, és mik a fő alkotóelemei?
A szállítórendszer egy rendkívül dinamikus, számítógéppel vezérelt automatizált kisméretű alkatrészraktár (AS/RS), amelyet szabványosított rakodási egységek, például konténerek, kartonok vagy tálcák gyors és hatékony tárolására, áthelyezésére és visszakeresésére terveztek. Ez egy összetett mechatronikai rendszer, amely messze túlmutat a "szállítószalag" leegyszerűsített analógiáján. Egy ilyen rendszer teljesítménye és hatékonysága a főbb komponenseinek pontos interakciójából adódik:
- Állványrendszer: A rendszer statikus gerincét egy nagy sűrűségű acélszerkezet alkotja, amely tárolócsatornákat képez a rakodóegységek számára. Ezeket az állványokat úgy tervezték, hogy maximalizálják a rendelkezésre álló magasság kihasználását, és elérhetik a 20 méternél nagyobb, egyes esetekben akár a 30 méteres magasságot is.
- Ingaszállító járművek: Ezek az igazi igáslovak. Önvezető járművek, amelyek vízszintesen mozognak síneken egyetlen polcszinten belül. Teleszkópos villákkal vagy hasonló teheremelő eszközökkel felszerelve felveszik a rakományegységeket a polcokról, és a folyosó végére szállítják azokat.
- Liftek/emelőgépek: Ezek az alapvető alkatrészek biztosítják a függőleges kapcsolatot. Ezek szállítják a rakodóegységeket, vagy – egyes rendszerarchitektúrákban – magukat a szállítókocsikat a különböző állványszintek és az előzóna között, amely általában szállítószalag-technológiából áll. Teljesítményük gyakran kritikus tényező a rendszer teljes áteresztőképessége szempontjából.
- Szállítószalag-technológia: Görgős vagy szalagos szállítószalagok összekapcsolt hálózata alkotja a külvilággal való kapcsolatot. Ez szállítja az árukat a tárolóállomástól a liftekhez, a liftektől pedig a további folyamatokhoz, például a komissiózási, csomagolási vagy szállítási munkaállomásokhoz.
- Irányítás és szoftver (WMS/WCS/MFS): A teljes működés „agya”. Egy magasabb szintű raktárkezelő szoftver (WMS), vagy egy speciális raktárirányító rendszer (WCS) vagy anyagáramlási rendszer (MFS) koordinálja az összes egyes mozgást. Kezeli a tárolási helyeket, optimalizálja a szállítókocsik és liftek mozgási stratégiáit, és biztosítja a zökkenőmentes integrációt a vállalat átfogó informatikai környezetével, például a vállalati erőforrás-tervezési (ERP) rendszerrel.
Melyek az ingajárati rendszerek alapvető típusai, és hogyan különböznek felépítésükben és alkalmazásukban?
A transzferrendszer-technológia figyelemre méltó fejlődésen ment keresztül, a merev, egydimenziós architektúráktól a rendkívül rugalmas, háromdimenziós rendszerek felé haladva. Ez a fejlődés közvetlen válasz a nagyobb rugalmasság és skálázhatóság iránti növekvő piaci igényekre.
- Egyszintes szállítókocsi: Ez a klasszikus architektúra, ahol minden szállítókocsi véglegesen egyetlen állványszinthez és folyosóhoz van hozzárendelve. Az áteresztőképességet a szintenkénti szállítókocsik száma és a lift kapacitása határozza meg. A skálázhatóságot elsősorban további folyosók hozzáadásával érik el. Erre példák az SSI Flexi és Cuby rendszerek.
- Többszintes szállítókocsi: Ez a változat, amelyet gyakran a klasszikus tároló- és visszakereső gép (SRM) és a szállítókocsi hibridjeként írnak le, egy integrált emelőmechanizmus segítségével több szintet is kiszolgálhat egy folyosón belül. Ez csökkenti az állványszerkezet bonyolultságát és költségeit, és vonzó ár-teljesítmény arányt kínál közepes és nagy áteresztőképességű alkalmazásokhoz. Erre példa a Schäfer Lift & Run (SLR) rendszer.
- Sávváltó / 3D-s kocsik: Jelentős evolúciós ugrás. Ezek a kocsik nemcsak vízszintesen tudnak mozogni a folyosón belül, hanem folyosókat is tudnak váltani. Ez teljesen szétválasztja a teljesítményt (kocsik száma) a tárolási kapacitástól (polchelyek száma). Egy vállalat akár néhány kocsival is elkezdhet, és könnyen bővítheti a kínálatot a növekvő igények szerint. Továbbá lehetővé teszik az áruk 100%-os sorrendjének létrehozását, amelyet közvetlenül a rendszeren belül lehet visszakeresni, potenciálisan kiküszöbölve a további válogatási folyamatok szükségességét. A KNAPP Evo Shuttle 2D kiemelkedő példa erre a kocsitípusra.
- Kúszórobotok / kocka tárolórendszerek: Ez a forradalmi fejlesztés szakít a hagyományos ingajárati architektúrával. Itt a robotok vagy egy rácsos kereten haladnak sűrűn egymásra rakott konténerek felett (pl. AutoStore), vagy közvetlenül fel-le másznak az állványzaton (pl. Exotec Skypod). Ezek a 3D rendszerek teljesen kiküszöbölik a külön folyosók és liftek szükségességét, ami rendkívül nagy tárolási sűrűséget és rugalmasságot eredményez.
- Raklapszállító kocsik: Speciális kategória a teljes raklapok nagy sűrűségű tárolására. Ezek a robusztus szállítókocsik mély tárolócsatornákban működnek, és gyakran használják hűtőházakban vagy puffertárolásra a termelésben.
Ez a technológiai fejlődés az ingajáratok világában figyelemre méltó. Azt mutatja, hogy a gyártók felismerték a rugalmasabb AMR-ek jelentette kihívást, és aktívan próbálják integrálni az AMR-szerű jellemzőket – például a folyosók közötti váltás vagy a háromdimenziós működés képességét – nagy sűrűségű tárolási paradigmájukba. Ennek eredményeként az egykor egyértelmű határok elmosódnak, és a mai legfejlettebb „ingajárati rendszerek” lényegében specializált, vertikálisan orientált AMR-rendszerek, amelyek egy meghatározott struktúrán belül működnek.
Mit jelent a „robot” egy raktári környezetben, és mi a lényegi különbség az autonóm mobil robotok (AMR) és a vezető nélküli szállítórendszerek (AGV-k) között?
A raktározás kontextusában alapvető fontosságú a „robot” általános kifejezés, valamint a specifikus technológiák, az AGV (automatizált, irányított járművek) és az AMR (autonóm mobil robot) közötti különbségtétel. Bár mindkettő szállítóeszköz, alapvetően eltérő navigációs filozófiákon alapulnak.
- AGV (Automated Guided Vehicle): Ez a régebbi, bevált technológia. Az AGV-k „irányított” járművek. Fix, fizikailag vagy virtuálisan meghatározott útvonalakat követnek, amelyeket a padlóba helyezett mágnescsíkok, színes vonalak, reflektorokra irányított lézerszkennerek vagy más irányító rendszerek határoznak meg. Intelligenciájuk korlátozott: ha egy AGV akadályba ütközik, megáll és megvárja, amíg az út újra szabaddá válik. A megvalósítás összetett, gyakran szerkezeti módosításokat igényel az infrastruktúrában, és az így létrejövő rendszer merev. Az útvonal bármilyen megváltoztatása jelentős erőfeszítést igényel.
- AMR (Autonóm Mobil Robot): Ez egy újabb, sokkal intelligensebb és rugalmasabb technológia. Az AMR-ek „autonóm” járművek. Nem igényelnek külső irányítást. Ehelyett digitális térképet készítenek a környezetükről, és szabadon navigálnak, hasonlóan egy önvezető autóhoz. Fejlett érzékelőik segítségével valós időben érzékelik az akadályokat, például embereket, targoncákat vagy felügyelet nélkül hagyott raklapokat, és dinamikusan terveznek egy alternatív útvonalat azok elkerülésére. Bevezetésük gyors, nem igényel szerkezeti módosításokat, és maximális rugalmasságot kínálnak.
Miközben a technológiai határok egyre inkább elmosódnak, mivel az AGV-k egyre intelligensebb funkciókkal is fel vannak szerelve, az alapvető különbség továbbra is fennáll: az AGV egy előre meghatározott útvonalat követ, míg az AMR intelligensen navigál egy szabadon bejárható térben. Ezért a következő elemzés egyértelműen a rugalmas AMR-ekre összpontosít, mint a strukturált ingajárati rendszerek valódi technológiai megfelelőire.
Hogyan navigálnak és működnek az AMR-ek egy dinamikus raktári környezetben, hogy önállóan elvégezhessék a feladataikat?
Az AMR-ek autonómiája és rugalmassága a térképezés, az érzékelők és az intelligens szoftverek rendkívül kifinomult kölcsönhatásán alapul. A folyamat több lépésre osztható:
- Térképezés: Mielőtt egy automatizált raktárgép (AMR) megkezdhetné a munkáját, létre kell hozni a raktár digitális térképét. Ez vagy „offline” módon történik, amikor egy robot manuálisan vezeti át a környezetet az adatok gyűjtése érdekében, vagy „online” módon, amikor a robot valós időben, működés közben készíti el és finomítja a térképet.
- Lokalizáció (SLAM): A helymeghatározáshoz az AMR a SLAM (Simultaneous Localization and Mapping) nevű technológiát használja. A robot folyamatosan összehasonlítja az érzékelőiből származó adatokat a tárolt térképpel, hogy valós időben, nagy pontossággal meghatározza saját pozícióját és tájolását.
- Érzékelők: Az AMR-ek különféle érzékelőkkel vannak felszerelve, amelyek átfogó, 360 fokos áttekintést nyújtanak a környezetükről:
- LiDAR (fényérzékelés és távolságmérés): A lézerszkennerek fényimpulzusokat bocsátanak ki, és mérik azok visszaverődését, hogy a környezet pontos pontfelhőjét hozzák létre. Ez az elsődleges technológia a távoli akadályok feltérképezésére és észlelésére.
- 3D kamerák: Vizuális adatokat és mélységinformációkat rögzítenek, ami javítja a tárgyfelismerést. Gyakran használják őket finom pozicionálásra is QR-kódok vagy más jelölések leolvasásával a padlón vagy a polcokon.
- IMU (inerciális mérőegység): Egy inerciális mérőrendszer, amely méri a gyorsulást és a forgási sebességet, és segít a robotnak nyomon követni saját mozgását az érzékelőfrissítések között.
- Navigáció és akadályok elkerülése: A flottakezelő rendszer rendel egy úti célt az AMR-hez (pl. "hajtás az 5-ös csomagkiadó állomásra"). A robot ezután kiszámítja az optimális útvonalat. Az út során érzékelők folyamatosan figyelik az utat. Ha váratlan akadályt észlel, az AMR nem egyszerűen megáll, hanem elemzi a helyzetet, és másodperc töredéke alatt tervez egy kerülőutat, hogy elérje úti célját.
- Mesterséges intelligencia (MI) és gépi tanulás (ML): Fejlett algoritmusok dolgoznak a háttérben, értelmezik a szenzoroktól érkező hatalmas adatmennyiséget, a legbiztonságosabb és leghatékonyabb útvonaltervezési döntéseket hozzák meg, és a folyamatos tanulás révén javítják a robot navigációs teljesítményét.
Az Ön intralogisztikai szakértői

Magasraktárak és automatizált tárolórendszerek teljes körű megoldásainak tanácsadása, tervezése és megvalósítása - Kép: Xpert.Digital
Bővebben itt:
Shuttle vs. AMR: Intelligens robotok vagy klasszikus shuttle rendszerek?
Közvetlen rendszer-összehasonlítás – Többdimenziós elemzés
Hogyan teljesítenek az ingajárati rendszerek és az automatizált mobil robotok (AMR) egy közvetlen teljesítmény-összehasonlításban az átviteli sebesség és a sebesség tekintetében?
A teljesítmény, amelyet az átviteli sebességgel (pl. óránkénti tárolási és visszakeresési sebesség) mérnek, az egyik legfontosabb megkülönböztető jellemző a két rendszerfilozófia között.
A transzfer rendszereket az alapoktól kezdve rendkívül nagy áteresztőképességre tervezték egy meghatározott környezetben. Architektúrájukat úgy tervezték, hogy párhuzamos mozgásokat hajtson végre. Míg több tucat transzfer mozog vízszintesen a megfelelő szinteken egyidejűleg, a liftek függőleges irányban függetlenül működnek. A vízszintes és függőleges szállítási útvonalak szétválasztása hatalmas csúcsteljesítményt tesz lehetővé. A vezető rendszerek óránként és folyosónként több mint 1000 dupla ciklus (egy betárolás és egy visszakeresés) áteresztőképességet érhetnek el. Ez teszi a transzfer rendszereket vitathatatlan "sprinterré" a nagy gyakoriságú, ismétlődő betárolási és visszakeresési feladatokhoz egy fix struktúrában.
Az autonóm mobil robotok (AMR-ek) hagyományos formájukban nem elsősorban a lehető legkisebb térben maximális áteresztőképességre vannak optimalizálva. Erősségük az áruk rugalmas és hatékony szállításában rejlik változó és gyakran nagy távolságokon, dinamikus környezetben. Míg egyetlen AMR akár 4 m/s sebességet is elérhet, egy flotta teljes áteresztőképessége számos tényezőtől függ: az útvonalak összetettségétől, más robotok vagy emberek forgalmának nagyságától, az állomások közötti távolságtól és az általános rendelési struktúrától. Inkább "maratoni futókhoz" hasonlítanak, amelyek alkalmazkodnak a változó körülményekhez.
A technológiák fent említett konvergenciája azonban itt is megmutatkozik. Az úgynevezett kockatároló rendszerek, mint például az Exotec Skypod, amelyek mászórobotokon alapulnak, kifejezetten az automatizált mobil robotok (AMR) rugalmasságának és a nagyon nagy áteresztőképességnek az ötvözésére szolgálnak. Az összekapcsolt komissiózó állomásokon akár óránként 400 komissiózási művelet is elérhető állomásonként. Ezek a hibrid megközelítések egyre inkább megkérdőjelezik a hagyományos „inga = nagy áteresztőképesség” és az „AMR = nagy rugalmasság” dichotómiát.
Alkalmas:

Melyik rendszer kínál nagyobb tárolási sűrűséget és használja ki hatékonyabban a rendelkezésre álló helyet?
A tárolási sűrűség hagyományosan kulcsfontosságú érv, és a transzfer rendszerek egyik területe. Az emelkedő ingatlan- és telekárak világában a térfogatkihasználás maximalizálása kulcsfontosságú gazdasági tényező.
A szállítórendszerek páratlan tárolási sűrűséget kínálnak. A folyosók számának minimalizálásával és a teljes rendelkezésre álló, akár 30 méteres vagy annál nagyobb épületmagasság kihasználásával a tárolóhely rendkívül tömörödik. Az olyan technikák, mint a konténerek dupla vagy többszörös mélységű tárolása a csatornákon belül, tovább maximalizálják a kapacitást egy adott alapterületen.
A klasszikus formájukban lévő automatizált tárolók (AMR), amelyek széles polcok között szállítanak árut, természetesen szélesebb mozgási utakat igényelnek, és nem tudják olyan hatékonyan kihasználni a függőleges dimenziót. Optimalizálásuk nem a statikus tárolási sűrűségre, hanem a dinamikus folyamathatékonyságra összpontosít.
Azonban még ebben a szakterületen is elmosódnak a világos határok. A fent említett kocka alakú tárolórendszerek (mint például az AutoStore vagy az Exotec Skypod) rendkívül nagy tárolási sűrűséget érnek el azáltal, hogy a konténereket polcok nélkül, közvetlenül egymásra rakják, a robotok pedig felülről férnek hozzá a szükséges konténerhez. Ezek a rendszerek egy kompakt raktár sűrűségét ötvözik a robotok rugalmasságával. További fejlesztés a kúszó AMR-ek (Automated Climbing Robots, ACR), amelyek képesek magas szabványos polcok kiszolgálására, így jelentősen javítják a függőleges térkihasználást a tisztán földi járművekhez képest.
Mennyire rugalmasak és skálázhatóak a két rendszer a változó üzleti igényekhez és a szezonális csúcsidőszakokhoz képest?
A rugalmasság és a skálázhatóság az automatikus mobil architektúrák (AMR) jellemzői, és gyakran döntő érvet jelentenek a volatilis piacokon való alkalmazásuk mellett.
Az AMR-ek maximális rugalmasságot és skálázhatóságot kínálnak:
- Skálázhatóság: A nagyobb rendelési mennyiségekhez való alkalmazkodás rendkívül egyszerű. Az áteresztőképesség növelése érdekében további robotokat lehet egyszerűen hozzáadni a meglévő flottához. Ez a folyamat perceken vagy órákon belül elvégezhető a működés megszakítása nélkül. A tárolókapacitás bővíthető további állványok telepítésével, teljesen függetlenül az áteresztőképességtől (azaz a robotok számától).
- Rugalmasság: Az AMR-ek szoftveresen definiáltak. Új útvonalak, további munkaállomások vagy teljesen megváltoztatott folyamatfolyamatok azonnal megvalósíthatók szoftverfrissítésekkel. A rendszer fizikai módosítások nélkül alkalmazkodik az új raktárelrendezéshez vagy a változó követelményekhez. Ez ideális megoldássá teszi őket a rendkívül dinamikus környezetekhez, mint például az e-kereskedelem vagy a harmadik fél logisztikája (3PL), ahol a rendelési mennyiségek és struktúrák jelentősen ingadoznak.
A transzfer rendszerek hagyományosan sokkal merevebbek:
- Skálázhatóság: Míg a modern ingajáratos rendszerek elvileg modulárisak és skálázhatóak, a folyamat lényegesen összetettebb. További ingajáratok adhatók hozzá a folyosókhoz az áteresztőképesség növelése érdekében, vagy teljes állványfolyosók bővíthetők a tárolási kapacitás növelése érdekében. Az ilyen bővítések azonban jelentős építési projektek, amelyek alapos tervezést, jelentős beruházást és gyakran a működés részleges vagy teljes leállítását igénylik.
- Rugalmasság: Az állványfolyosók, sínek és liftek alapvető infrastruktúrája rögzített. Az anyagáramlás alapvető megváltoztatása, például egy komissiózási zóna áthelyezése, rendkívül nehéz és költséges. A rendszer egy adott, optimalizált folyamathoz van tervezve, és nehezen alkalmazkodik az alapvető változásokhoz.
Miben különböznek a rendszerek a tőkekiadások (CAPEX), az üzemeltetési költségek (OPEX) és a megvalósítási idő tekintetében?
A teljes birtoklási költség (TCO) és a bevezetés sebességének elemzése alapvetően eltérő üzleti modelleket tár fel, és kulcsfontosságú a befektetési döntések szempontjából.
- Kezdeti befektetés (CAPEX):
- Ingázó rendszerek: Ezek nagyon magas kezdeti beruházást igényelnek. A költségek nemcsak magukat a járműveket tartalmazzák, hanem egy hatalmas infrastruktúrát is, amely nagy precizitású acélszerkezetből, nagy teljesítményű emelőkből, kilométernyi szállítószalag-technológiából és komplex vezérlőtechnológiából áll.
- Automatizált robotrobotok (AMR): Jelentősen alacsonyabb kezdeti beruházást igényelnek. Mivel a meglévő infrastruktúrán belül mozognak, nincs szükség drága és összetett módosításokra. A vállalatok egy kisebb, mindössze néhány robotból álló flottával kezdhetnek, és fokozatosan igazíthatják beruházásaikat az üzleti növekedéshez („fizetés a növekedésed alapján”). Az olyan modellek, mint a „Robot-as-a-Service” (RaaS), ahol a hardvert bérlik, szintén egyre inkább elterjednek, tovább csökkentve a CAPEX korlátot, és a költségeket változó működési költségekké (OPEX) alakítva.
- Megvalósítási idő:
- Transzferrendszerek: Egy transzferprojekt megvalósítása hosszadalmas folyamat, amely a tervezéstől és gyártástól a telepítésig és üzembe helyezésig több hónapig vagy akár évekig is eltarthat. A telepítés elkerülhetetlenül jelentős működési zavarokhoz vezet.
- AMR-ek: A megvalósítás rendkívül gyors. A környezet feltérképezése után a robotok gyakran néhány napon vagy héten belül üzembe helyezhetők, sőt, akár a folyamatban lévő műveletekkel párhuzamosan is. Ez a gyors telepítés jelentősen gyorsabb megtérülést (ROI) eredményez, ami sok esetben kevesebb, mint egy év is lehet.
- Üzemeltetési költségek (OPEX):
- Átrakós rendszerek: Magas hatékonyságuk és csökkentett személyzeti igényük miatt hosszú távon nagyon költséghatékonyak lehetnek. Az összetett rendszer karbantartása azonban igényes és költséges lehet. A modern átrakós rendszerek lényegesen energiahatékonyabbak, mint a régebbi tároló- és visszakereső gépek.
- AMR-ek: A robotonkénti karbantartási költségek viszonylag alacsonyak, de egy nagy flotta esetében figyelembe kell venni a karbantartás és az akkumulátor-kezelés összráfordítását. A modern lítium-ion akkumulátorok és az intelligens, automatizált töltési ciklusok alacsonyan tartják az energiafogyasztást és az üzemeltetési ráfordítást.
Ezen technológiák mögött meghúzódó pénzügyi modellek ugyanolyan változatosak, mint a műszaki jellemzőik. Az ingajárati rendszerek hagyományos, hosszú távú, nagyszabású projekteket képviselnek, amelyek magas fokú befektetési biztonságot és a jövőbeli kereslet pontos előrejelzését igénylik. Az AMR-ek ezzel szemben, különösen az RaaS modellekkel, paradigmaváltást jelentenek az agilis finanszírozás és az operatív kiadások felé. Lehetővé teszik a vállalatok számára, hogy az automatizálást skálázható szolgáltatásnak, ne pedig lekötött eszköznek tekintsék. Ez a pénzügyi rugalmasság sok vállalat számára ugyanolyan diszruptív, mint maga a technológia, demokratizálva a fejlett logisztikai automatizáláshoz való hozzáférést azáltal, hogy lehetővé teszi a kisebb és középvállalkozások számára, hogy versenyezzenek az iparági óriásokkal.
A kritériumok részletes összehasonlítása: transzfer rendszerek vs. autonóm mobil robotok (AMR)
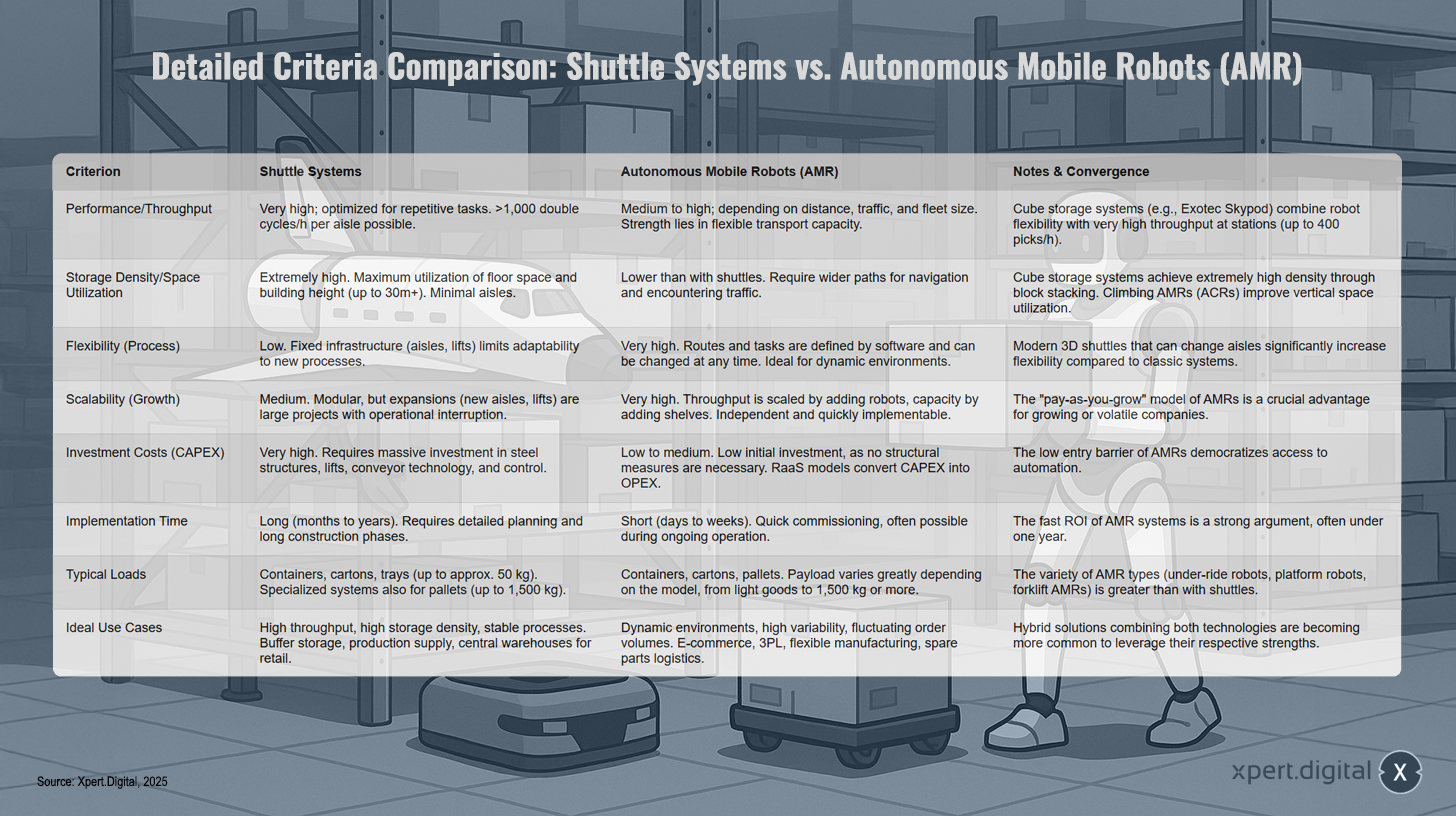
A kritériumok részletes összehasonlítása: transzfer rendszerek vs. autonóm mobil robotok (AMR) – Kép: Xpert.Digital
A transzferrendszerek és az autonóm mobil robotok (AMR) összehasonlítása lenyűgöző fejlődést tár fel a raktártechnológiában. Mindkét rendszernek megvannak a maga erősségei és gyengeségei, amelyeket az alkalmazástól függően eltérően kell súlyozni.
Az ingajárati rendszerek rendkívül magas, óránként több mint 1000 dupla ciklust képes áteresztőképességgel és akár 30 méteres magasságig terjedő maximális helykihasználással tűnnek ki. Ideálisak stabil, ismétlődő, nagy volumenű folyamatokhoz. A beruházási költségek azonban jelentősek, a rugalmasságot pedig a fix infrastruktúra korlátozza.
Ezzel szemben az autonóm mobil robotok figyelemre méltó folyamatrugalmasságot kínálnak. Útvonalaik és feladataik szoftveresen gyorsan adaptálhatók, így tökéletesek a dinamikus környezetekhez. A megvalósítási idő rövid, és a kezdeti beruházások jelentősen alacsonyabbak. A modern megközelítések, mint például a kockatároló rendszerek, már bizonyítják, hogyan konvergálhat a két technológia.
A shuttle rendszerek és az AMR-ek közötti választás az adott üzleti igényektől függ: a shuttle rendszerek ideálisak a nagy áteresztőképesség és tárolási sűrűség érdekében, míg az AMR-ek a rugalmasság és a gyors skálázhatóság miatt a jobb választást jelentik. A vállalatok egyre inkább a hibrid megoldásokat választják, hogy ötvözzék a két technológia előnyeit.
A működés agya – szoftver, vezérlés és integráció
Milyen szerepet játszik a szoftver a transzfer rendszerek vezérlésében, és hogyan integrálódik a meglévő informatikai környezetbe (WMS/WMS)?
Intelligens szoftverréteg nélkül egy transzfer rendszer csupán egy „buta fém” gyűjteménye. Valódi potenciálja csak a rendszer digitális agyával való interakció révén bontakozik ki. Ezt a szerepet jellemzően egy raktárkezelő szoftver (WMS) és egy mögöttes anyagáramlási rendszer (MFS) vagy raktárirányító rendszer (WCS) kombinációja tölti be.
A szoftver feladatai sokrétűek és kulcsfontosságúak a teljesítmény szempontjából:
- Raktári helygazdálkodás: A szoftver valós időben dönti el, hogy melyik tárolási hely az optimális egy újonnan érkező tétel számára. A kritériumok magukban foglalhatják a hozzáférési gyakoriságot (ABC-elemzés), a tételek csoportosítását egy rendeléshez, vagy a folyosók egyenletes kihasználását.
- Rendelés- és sorrendkezelés: A rendszer a magasabb szintű ERP rendszertől fogadja a megrendeléseket, és azokat egyedi szállítási megrendelésekre bontja a hardverekhez. Biztosítja, hogy a tételek az optimális sorrendben kerüljenek kigyűjtésre a további folyamatokhoz (pl. csomagolás).
- Hardvervezérlés: A szoftver a zenekar karmestere. Ez küldi el a specifikus mozgásparancsokat minden egyes szállítóeszköznek, minden emelőnek és a szállítószalag-rendszer minden szegmensének, és szinkronizálja mozgásukat az anyagáramlás zavartalan és hatékony biztosítása érdekében.
- Valós idejű készletnyilvántartás: Mivel minden egyes mozgás rögzítésre kerül, a rendszer folyamatos, másodpercről másodpercre történő készletnyilvántartást kínál. A készletszint mindenkor 100%-ban átlátható.
A meglévő IT-környezetbe való integráció kulcsfontosságú a sikerhez. A WMS/MFS és a vállalat vállalatirányítási (ERP) rendszere közötti zökkenőmentes kommunikáció elengedhetetlen. A szabványosított interfészek (API-k) megkönnyítik a rendelési adatok, a törzsadatok és a készletinformációk cseréjét, garantálva a folyamatos információáramlást az ügyfélrendeléstől a szállítmányig.
Miért nélkülözhetetlen a flottakezelő szoftver az automatizált mobil életjárművek (AMR) számára, és milyen intelligens, mesterséges intelligencia alapú funkciókat kínál?
Ha a raktárkezelő szoftver (WMS) azt a stratégiai szintet képviseli, amely meghatározza a logisztikai folyamatok „mit” és „mikor” kérdését, akkor a flottakezelő szoftver az a taktikai intelligencia, amely valós időben dönti el, hogy egy AMR flotta „ki” és „hogyan” feladatokat lát el. Egyetlen AMR csak egy eszköz; egy központi irányítás nélküli flotta tiszta káosz lenne.
A flottakezelő szoftver nélkülözhetetlen, és számos rendkívül intelligens funkciót kínál:
- Forgalomirányítás: A légiforgalmi irányításhoz hasonlóan a szoftver koordinálja a raktárban lévő összes robot útvonalát. Megakadályozza az ütközéseket, szabályozza a kereszteződésekben az elsőbbséget, és a forgalom áramlásának dinamikus szabályozásával megakadályozza a torlódásokat.
- Intelligens feladatelosztás: Amikor új szállítási megbízás érkezik a raktárkezelő rendszerből (WMS), a flottakezelő szoftver eldönti, hogy melyik robot a legalkalmasabb a feladatra. A mesterséges intelligencia alapú algoritmusok valós időben számos tényezőt vesznek figyelembe: a robotok aktuális helyzetét, akkumulátoruk töltöttségi szintjét, aktuális munkaterhelésüket és a megbízás prioritását.
- MI-alapú útvonaltervezés: A szoftver nem csak a legrövidebb útvonalat számítja ki, hanem a leghatékonyabbat is. Képes előre jelezni és elkerülni a forgalmi dugókat, alternatív útvonalakat találni, ha az utak lezárulnak, és optimalizálni a teljes flotta anyagáramlását a szállítási idők minimalizálása érdekében.
- Perifériás eszközök integrációja: A modern flottamenedzserek nemcsak magukat a robotokat irányítják, hanem a környezetükkel való interakciójukat is összehangolják. Automatikusan kinyithatják a kapukat, hívhatják a lifteket, vagy koordinálhatják az áruk robotkarokra és szállítószalagokra történő átadását.
- Automatikus energiagazdálkodás: A szoftver figyeli az egyes robotok töltöttségi szintjét, és automatikusan a legközelebbi elérhető töltőállomásra küldi azokat, amikor az akkumulátor töltöttségi szintje alacsony, így biztosítva a 24/7-es működést.
Egy kulcsfontosságú előrelépés a gyártófüggetlen kommunikációs szabványok, például a VDA 5050 kidolgozása. Az ezt a szabványt támogató flottamenedzserek különböző gyártók járműveinek heterogén flottáit tudják irányítani. Ez szabadságot ad a vállalatoknak, hogy minden feladathoz a legjobb robotot válasszák, és megakadályozza a hosszú távú függőséget egyetlen beszállítótól („szállítói függőség”).
Melyek a legnagyobb kihívások ezen összetett rendszerek interoperabilitásának és a meglévő működési folyamatokba való zökkenőmentes integrációjának elérésében?
A fejlett automatizálási megoldások bevezetése összetett vállalkozás, amely messze túlmutat a puszta technológián. A kihívások technikai és szervezési szempontokra oszthatók.
- Technikai kihívások:
- Rendszerkompatibilitás és interfészek: A legnagyobb technikai akadály a különböző szoftverrétegek – ERP, WMS, MFS és flottamenedzsment – közötti zökkenőmentes kommunikáció biztosítása. Ez gyakran speciális köztes szoftverek használatát vagy testreszabott alkalmazásprogramozási interfészek (API-k) komplex fejlesztését igényli, hogy a rendszerek kommunikálni tudjanak egymással.
- Adatharmonizáció: Az adatformátumokat és protokollokat helyesen kell „lefordítani” és szabványosítani a rendszerek között (adatleképezés), hogy az ERP rendszerből származó megrendelés végül a raktárban a helyes fizikai mozgáshoz vezessen.
- Hálózati infrastruktúra: Az AMR-ek különösen rendkívül stabil, átfogó és nagy teljesítményű Wi-Fi kapcsolatra támaszkodnak. Sok meglévő raktárban a hálózat nincs ezekhez a követelményekhez tervezve, és költséges fejlesztéseket igényel.
- Biztonság: Az integrációnak garantálnia kell mind a fizikai, mind a digitális biztonságot. Ez magában foglalja a meglévő biztonsági rendszerekhez, például a vészleállító áramkörökhöz és a tűzvédelmi rendszerekhez való csatlakozást, valamint a teljes hálózat védelmét a kibertámadásokkal szemben, amelyek egy egész flottát megbéníthatnak.
- Szervezeti kihívások:
- Munkavállalói elfogadás és változásmenedzsment: A robotok bevezetése félelmeket kelthet a munkaerőben a munkahely elvesztésétől. Egy sikeres projekthez ezért nyílt kommunikációs stratégiára, a munkavállalók korai bevonására és átfogó képzési programokra van szükség a gépekkel való munkavégzéshez szükséges új készségek elsajátításához (pl. flottafelügyelet, karbantartás).
- Folyamat-újratervezés: A befektetés legnagyobb megtérülését nem lehet egyszerűen egy ember géppel való helyettesítésével elérni. Az igazi siker a teljes folyamatlánc alapvető újratervezésében rejlik, hogy teljes mértékben kihasználhassuk az automatizálás egyedi lehetőségeit. Ehhez újra kell gondolni a munkafolyamatokat, a teljesítménymutatókat és a vezetési filozófiákat.
- Kezdeti befektetés: Az előnyök ellenére a költségek, különösen az átfogó transzferrendszerek esetében, jelentős akadályt jelentenek sok középvállalkozás számára. Az olyan stratégiák, mint a kis kísérleti projektekkel való kezdés, a fokozatos méretezés vagy a RaaS finanszírozási modellek alkalmazása, segíthetnek leküzdeni ezt az akadályt.
A tapasztalat azt mutatja, hogy a legnagyobb kihívások gyakran nem technikaiak, hanem szervezési jellegűek. Egy automatizálási projekt nem egyszerűen informatikai projekt, hanem egy mélyreható üzleti átalakítási projekt. Azok a vállalatok, amelyek csupán megpróbálják az új technológiát a régi, manuális folyamatokba „beilleszteni”, nem fogják kiaknázni a benne rejlő teljes potenciált. A nyertesek azok lesznek, akik a technológiát katalizátorként használják fel a teljes működési modelljük újragondolására.
🎯🎯🎯 Profitáljon az Xpert.Digital széleskörű, ötszörös szakértelméből egy átfogó szolgáltatáscsomagban | BD, K+F, XR, PR és digitális láthatóság optimalizálása

Profitáljon az Xpert.Digital széleskörű, ötszörös szakértelméből egy átfogó szolgáltatáscsomagban | K+F, XR, PR és digitális láthatóság optimalizálása - Kép: Xpert.Digital
Az Xpert.Digital mélyreható ismeretekkel rendelkezik a különböző iparágakról. Ez lehetővé teszi számunkra, hogy személyre szabott stratégiákat dolgozzunk ki, amelyek pontosan az Ön konkrét piaci szegmensének követelményeihez és kihívásaihoz igazodnak. A piaci trendek folyamatos elemzésével és az iparági fejlemények követésével előrelátóan tudunk cselekedni és innovatív megoldásokat kínálni. A tapasztalat és a tudás ötvözésével hozzáadott értéket generálunk, és ügyfeleink számára meghatározó versenyelőnyt biztosítunk.
Bővebben itt:
Ingázók vs. automatizált mobil robotok – Hibrid rendszerek: A logisztikai siker kulcsa a következő évtizedben?
Piac, szereplők és jövőbeli trendek
Hogyan néz ki a jelenlegi piaci környezet, és milyen növekedési előrejelzések léteznek a raktárautomatizálás terén?
A raktárautomatizálási piac robbanásszerű növekedést mutat, amelyet az e-kereskedelem, az omnichannel kiskereskedelem és a globális munkaerőhiány visszafordíthatatlan trendjei hajtanak. Az adatok egyértelmű képet festenek egy felemelkedőben lévő iparágról:
- Piac mérete és növekedése: A globális piac becslések szerint 2024-re eléri a 26,5 milliárd USD-t. Az előrejelzések lenyűgöző, több mint 15,9%-os összetett éves növekedési ütemet (CAGR) jósolnak a 2034-ig tartó időszakra. Különösen Európában a 2024-es 4,9 milliárd USD-ről 2029-re 9,59 milliárd USD-re várható a növekedés, ami 14,4%-os éves összetett növekedési ütemet jelent. Hasonló dinamika figyelhető meg Észak-Amerikában is, ahol az amerikai piac várhatóan több mint kétszeresére nő 2030-ra.
- Piaci penetráció: Ezen lenyűgöző növekedési adatok ellenére a potenciál messze nincs kimerítve. Becslések szerint világszerte a raktáraknak csak mintegy 5%-a magas szinten automatizált. További 15% részleges megoldásokat, például szállítószalagokat használ, míg a túlnyomó többség, 80% még mindig nagyrészt manuálisan működik. Ez az alacsony automatizálási szint hatalmas jövőbeli növekedési potenciált jelez az olyan technológiák számára, mint az ingajárati rendszerek és az AMR-ek.
- Regionális fókuszterületek: Európa, és különösen Németország, a világ egyik legmagasabb robotsűrűségével büszkélkedhet, és az OEM-ek és rendszerintegrátorok gócpontja. Ugyanakkor Közép- és Kelet-Európát gyorsan növekvő jövőbeli piacnak tekintik. Az USA-ban, különösen a középvállalkozások nagy szegmensében, jelentős az automatizálás terén való felzárkózás, ami ott is erős növekedést generál.
Alkalmas:

Mely cégek a vezető ingajárati és AMR rendszerek szállítói?
A versenykörnyezet heterogén. Az ingajárati rendszerek szektorában a nagy, bevált intralogisztikai szolgáltatók dominálnak, gyakran komplett, kulcsrakész megoldásokat kínálva. Az automatizált robotikai (AMR) piac dinamikusabb és széttagoltabb, vegyesen jelen van a befutott ipari vállalatok és a magasan specializált, agilis robotikai startupok között.
- A transzfer rendszerek vezető szolgáltatói (gyakran az átfogó megoldások részeként):
- DAIFUKU (Japán)
- SSI Schäfer (Németország)
- Dematic (a Kion Group része, Németország)
- KNAPP (Ausztria)
- TGW Logisztikai Csoport (Ausztria)
- Vanderlande (a Toyota Industries része, Hollandia)
- Mecalux (Spanyolország)
- Swisslog (a KUKA AG része, Svájc)
- WITRON Logisztika + Informatika (Németország)
- AMR rendszerek vezető szolgáltatói (specializáció szerint kiválasztva):
- Áruk a személyhez / Mászórobotok: Exotec (Franciaország), Geek+ (Kína), Hai Robotics (Kína).
- Személy-áru / Együttműködő robotok: Locus Robotics (USA), Mobile Industrial Robots (MiR, a Teradyne része, Dánia).
- Ipari AMR-ek és flottakezelés: KUKA (Németország), ABB (Svájc/Svédország), DS AUTOMOTION (az SSI Schäfer része, Ausztria).
Összességében a piaci koncentráció „közepesnek” minősül, ami egészséges és innovációvezérelt versenyre utal a szereplők között.
Milyen technológiai trendek, mint például a hibrid rendszerek, a mesterséges intelligencia és a kobotok, fogják alakítani a raktári rendszerek következő generációját?
A raktárautomatizálás fejlesztései folyamatosan fejlődnek. Számos kulcsfontosságú trend fogja meghatározni a rendszerek következő generációját, és tovább feszegetni a ma elérhető lehetőségek határait.
- Hibrid rendszerek és konvergencia: A különböző rendszervilágok közötti szigorú elkülönülés feloldódik. A jövő az integrált, hibrid megoldásoké, amelyek intelligensen ötvözik erősségeiket. Egy tipikus forgatókönyv egy nagy sűrűségű ingajáratos vagy kocka alakú tárolórendszer használatát foglalja magában a raktározáshoz, és azt rugalmas, automatizált vezetésű járművekhez (AGV-k) való csatlakoztatásával szállítják az árukat a decentralizált, ergonomikus komissiózó állomásokra vagy a különböző raktár- és termelési területek között. Ez elkerüli a merev szállítószalag-technológiát, és maximalizálja mind a sűrűséget, mind a rugalmasságot.
- Mindenütt jelenlévő mesterséges intelligencia (MI) és gépi tanulás (ML): A MI a résfunkcióból a teljes raktárgazdálkodás szerves részévé fejlődik. Az automatizált vezetésű járművek (AGV) egyszerű útvonaltervezésén túl globális folyamatoptimalizálásra is használják: prediktív elemzés a keresleti csúcsok előrejelzésére és az erőforrások proaktív kiigazítására, intelligens készletoptimalizálás, amely dinamikusan áthelyezi a tételeket az előre jelzett rendelések alapján, valamint adaptív tanulási algoritmusok, amelyek folyamatosan fejlesztik a teljes rendszert az operatív adatok elemzésével.
- Ember-robot együttműködés és kobotok: Az emberek nem tűnnek el a raktárakból, de szerepük a kézi munkáról a felügyeletre, az irányításra és a problémamegoldásra helyeződik át. Együttműködő robotokat (kobotokat) és automatizált vezetésű járműveket (AGV-ket) fejlesztenek, hogy biztonságosan és hatékonyan dolgozhassanak az emberek mellett. Az ergonomikus „áruk a személyhez” vagy „áruk a robothoz” munkaállomások, ahol az emberek és a gépek kéz a kézben szedik össze a rendeléseket, egyre inkább szabvánnyá válnak.
- Dolgok Internete (IoT) és teljes körű konnektivitás: A jövő raktára teljes mértékben hálózatba van kötve. A polcokon, gépeken, robotokon és magukon a rakodóegységeken található érzékelők folyamatosan valós idejű adatokat szolgáltatnak. Ezeket az adatokat a mesterséges intelligencia rendszerek használják fel a raktár digitális ikertestvérének létrehozására, valamint a fizikai folyamatok példátlan pontosságú vezérlésére és optimalizálására.
- Fenntarthatóság és energiahatékonyság: A növekvő energiaköltségek és a társadalmi nyomás fényében a fenntarthatóság egyre fontosabb tervezési kritériummá válik. Az alacsony energiafogyasztású rendszerek, mint például az AutoStore egymást energiával ellátó robotjai, vagy az energiahatékony ingajáratok, egyre nagyobb jelentőséget kapnak. A körforgásos gazdaság előmozdítása az optimalizált visszaküldési folyamatokon keresztül szintén kulcsfontosságú szemponttá válik.
Az intralogisztika jövőbeli trendjei és azok hatása
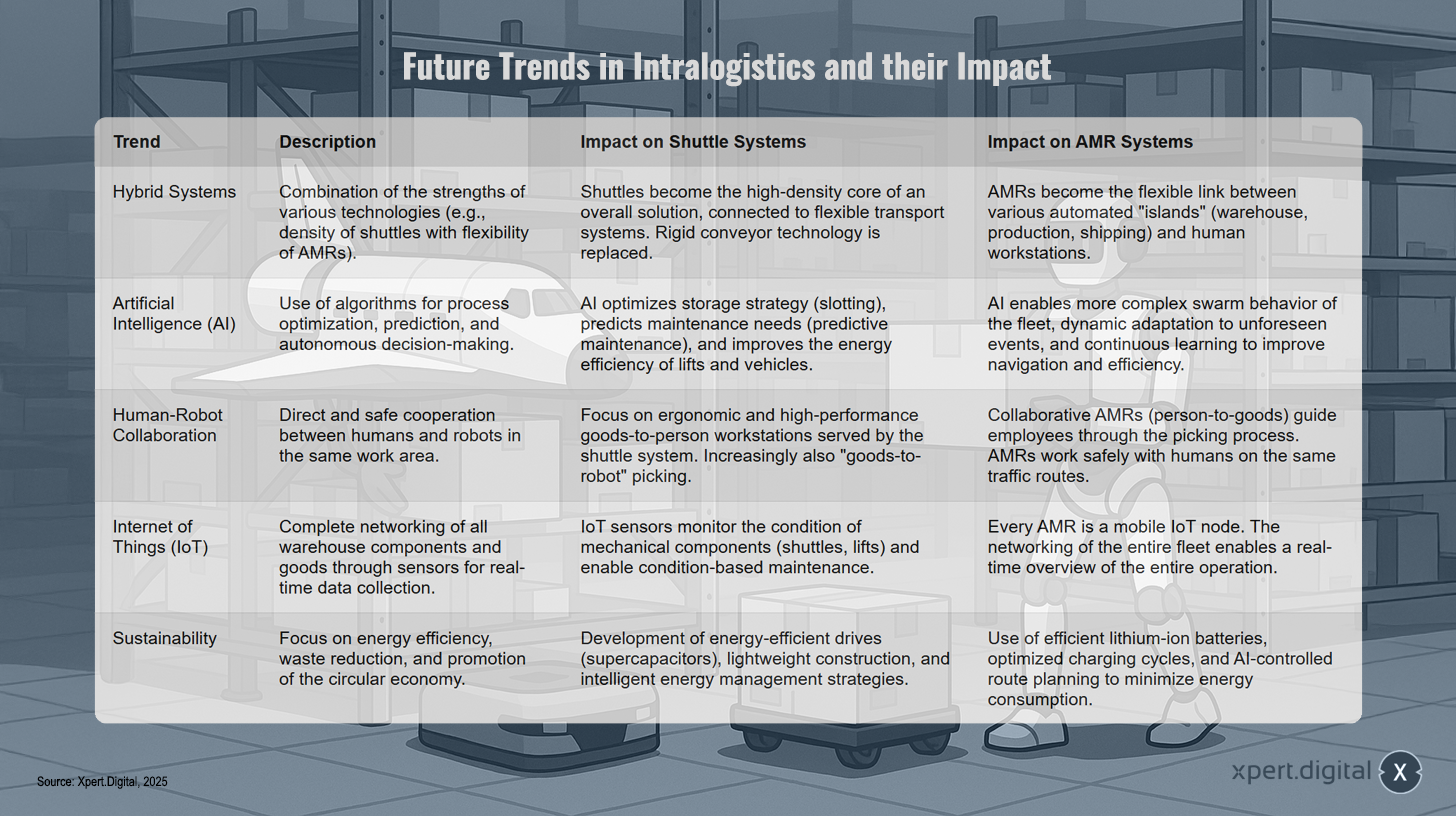
Jövőbeli trendek az intralogisztikában és azok hatása – Kép: Xpert.Digital
Az intralogisztika jövőjét számos jelentős trend fogja alakítani, amelyek forradalmasítják a logisztikai rendszerek teljesítményét és hatékonyságát. A hibrid rendszerek kulcsfontosságú stratégiát képviselnek, egyesítve a különböző technológiák erősségeit. Az ingajárati rendszerek egy átfogó megoldás nagy sűrűségű magját alkotják, míg az autonóm mobil robotok (AMR) rugalmas kapcsolatként működnek majd a különböző automatizált területek között.
A mesterséges intelligencia (MI) kulcsszerepet játszik a folyamatok optimalizálásában. Nemcsak a készletgazdálkodási stratégiák és a prediktív karbantartás fejlesztését teszi lehetővé, hanem a robotflották összetettebb rajviselkedését is. Az ember-robot együttműködés egyre fontosabbá válik, ahol a robotok biztonságosan és ergonomikusan dolgoznak az emberi alkalmazottak mellett.
A dolgok internete (IoT) valós időben összekapcsolja az összes raktári komponenst, átfogó átláthatóságot teremtve. Minden robot mobil adatközponttá válik, amely információkat cserél és elemez. Ugyanakkor a fenntarthatóság egyre nagyobb jelentőségre tesz szert. Az energiahatékony hajtások, az optimalizált akkumulátortechnológiák és a mesterséges intelligencia által vezérelt útvonaltervezés célja az intralogisztika ökológiai lábnyomának minimalizálása.
Ezek a trendek azt mutatják, hogy az intralogisztika jövőjét a hálózatépítés, az intelligencia és a fenntarthatóság fogja jellemezni, ahol az ember és a technológia egyre szorosabban fog együttműködni.
Együttélés a verseny helyett – Melyik rendszer fogja uralni a jövőt?
Vajon az egyik rendszer kiszorítja-e a másikat, vagy az együttélés és a hibrid megoldások jövője felé haladunk?
A technológiák, teljesítményjellemzőik, költségszerkezetük és jövőbeli trendjeik mélyreható elemzése után egy dolog világossá válik: a „shuttle kontra robot” kérdés téves, ha azt sugallja, hogy az egyik rendszert a másik váltja fel. Az egyetlen, mindent uraló technológia gondolata egyszerűbb időkből maradt fenn. A raktárautomatizálás jövőjét nem egyetlen győztes fogja alakítani, hanem az intelligens, alkalmazásspecifikus együttélés és a technológiák egyre növekvő konvergenciája.
Nem lesz teljes elmozdulás. Ehelyett a rendszerek azokon az alkalmazási területeken fognak érvényesülni, ahol az alapvető erősségeiket a legjobban kihasználják:
- Az ingajáratos rendszerek (és azok további fejlesztései, mint például a kockatárolók) továbbra is dominánsak lesznek, ahol a maximális tárolási sűrűség és a rendkívül magas, kiszámítható áteresztőképesség a döntő kritérium. Ez vonatkozik az iparban a puffertárolásra, a nagy teljesítményű gyártósorok ellátására, az élelmiszer-kiskereskedelmi szektor nagy központi raktáraira vagy az e-kereskedelem gyorsan forgó tételeinek teljesítésénél.
- Az autonóm mobil robotok (AMR) minden olyan területen bizonyítják majd dominanciájukat, ahol a rugalmasság, a gyors skálázhatóság és a dinamikus folyamatokhoz való alkalmazkodóképesség kiemelkedő fontosságú. Ilyenek például a változékony e-kereskedelmi környezetek erősen ingadozó rendelési profilokkal, a harmadik féltől származó logisztika (3PL) gyakran változó ügyfelekkel és követelményekkel, valamint a rugalmas, moduláris gyártási koncepciók.
A legfontosabb és legmeghatározóbb trend azonban a technológiák konvergenciája és a hibrid rendszerek megjelenése. A jövő leghatékonyabb logisztikai központjai nem ingajáratokra vagy automatizált mobil robotokra (AMR) fognak támaszkodni, hanem integrált, átfogó megoldásokra, amelyek mindkét világ legjavát ötvözik. A dominanciát ezért nem egy adott hardvertechnológia fogja gyakorolni. Az intralogisztika jövőjéért folyó verseny igazi győztese a szoftverökoszisztéma. Az az intelligencia, amely képes a heterogén technológiákat – ingajáratokat, AMR-eket, kobotokat, szállítószalag-technológiát és manuális munkaállomásokat – zökkenőmentesen egy rendkívül hatékony, rugalmas és ellenálló egésszé összehangolni, jelenti majd a döntő versenyelőnyt.
Az ipar jövőjét az intelligens, rugalmas és hibrid automatizálási ökoszisztémák fogják uralni, ahol a megfelelő hardver kiválasztása az adott feladathoz, valamint annak tökéletes integrációja a kiváló szoftverek segítségével fogja meghatározni a sikert.

Xpert.Plus raktároptimalizálás – magasraktárak, például raklapraktárak tanácsadás és tervezés
Ott vagyunk Önért - tanácsadás - tervezés - kivitelezés - projektmenedzsment
☑️ Üzleti nyelvünk angol vagy német
☑️ ÚJ: Levelezés az Ön nemzeti nyelvén!

Konrad Wolfenstein
Szívesen szolgálok Önt és csapatomat személyes tanácsadóként.
Felveheti velem a kapcsolatot az itt található kapcsolatfelvételi űrlap kitöltésével , vagy egyszerűen hívjon a +49 89 89 674 804 (München) . Az e-mail címem: wolfenstein ∂ xpert.digital
Nagyon várom a közös projektünket.


















