Taktilis robotika: Tapintással rendelkező robotok: A Vulcan és az MIT haptikus tárgyfelismerési kutatásának új generációja – Kép: Xpert.Digital
Az MIT speciális érzékelők nélküli tárgyfelismerő rendszere és az Amazon Vulcan robotja
Gépek tapintásos érzékelése: Új mércét állít fel a tárgyfelismerésben
A robotika területén a tapintásérzékelő és felismerő rendszerek fejlesztése döntő előrelépést jelent, mivel lehetővé teszi a gépek számára, hogy ne csak lássák a környezetüket, hanem „érezzék” is azt. Ezt a fejlődést példázza az Amazon új Vulcan robotja és az MIT innovatív tárgyfelismerő rendszere. Mindkét technológia jelentősen kibővíti a robotok alkalmazási lehetőségeit, és olyan feladatokat tesz lehetővé, amelyeket korábban az emberek csak természetes tapintásos érzékelésükkel tudtak elvégezni.
Ehhez kapcsolódóan:


Az Amazon Vulcan robotja: Áttörés a tapintható robotfogás területén
Működési és technológiai alapok
Az Amazon által fejlesztett Vulcan robot jelentős technológiai előrelépést jelent a fizikai mesterséges intelligencia területén. Maga az Amazon is „áttörésként” írja le a fejlesztést a robotikában és a fizikai MI-ben. A rendszer két fő komponensből áll: a „Stow” a tárgyak tárolására és a „Pick” a visszakeresésükre. Kiemelkedő tulajdonsága, hogy tapinthatóan érzékeli a környezetét.
A Vulcan tapintási képességeinek technológiai alapját speciális, hokikorong alakú erő-nyomaték érzékelők alkotják, amelyek lehetővé teszik a robot számára, hogy „megérezze”, mekkora erőt tud kifejteni egy tárgy megragadásához anélkül, hogy az károsodna. Adam Parness, az Amazon robotikai mesterséges intelligencia igazgatója hangsúlyozza ennek a megközelítésnek az egyediségét: „A Vulcan nem az első robotunk, amely tárgyakat tud mozgatni. De a tapintásérzékével – azzal a képességével, hogy megérti, mikor és hogyan érintkezik egy tárggyal – új lehetőségeket nyit meg a munkafolyamatok és a létesítmények optimalizálására.”.
A tárgyak polcokra helyezéséhez a Vulcan egy hajvasalóra szerelt vonalzóhoz hasonló eszközt használ. Ezzel a „vonalzóval” félretolja a többi tárgyat, hogy helyet csináljon az újaknak. A megfogó karok a tárgy méretétől és alakjától függően állítják be a fogás erősségét, míg az integrált szállítószalagok a tárgyat a tartályba mozgatják. A tárgyak kiemeléséhez a Vulcan egy tapadókorongos megfogót használ egy kamerarendszerrel kombinálva.
Jelenlegi alkalmazási területek és teljesítmény
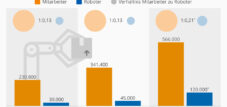
A Vulcan robotot jelenleg két Amazon logisztikai központban tesztelik: a Hamburg melletti Winsenben (Németország) és a washingtoni Spokane-ben (USA). Washingtonban hat Stow Vulcan robot működik, és már félmillió tételt tároltak sikeresen. Winsenben két Pick Vulcan robot dolgozik, és már 50 000 rendelést dolgoztak fel.
A rendszer képességei figyelemre méltóak: a Vulcan jelenleg az Amazon által kínált több millió termék körülbelül 75 százalékát képes kezelni. A robot által manipulálható legkisebb tárgy nagyjából egy rúzs vagy egy USB-kulcs méretű. Különösen lenyűgöző a robot azon képessége, hogy valós időben képes azonosítani a tárgyakat, mivel „lehetetlen lenne számára, hogy fejből ismerje a termékek minden részletét” – magyarázza Parness.
Jövőbeli tervek és integráció a logisztikai láncba
Az Amazon azt tervezi, hogy az elkövetkező években jelentősen növeli a Vulcan robotok számát. Idén a winseni Vulcanok száma várhatóan 60-ra, Washingtonban pedig 50-re nő. A hosszú távú terv az, hogy a robotokat Európa-szerte és az Egyesült Államokban telepítsék logisztikai központokba.
Az Amazon stratégiájának egyik kulcsfontosságú aspektusa az emberek és a gépek együttélése. A vállalat „mesterterve” szerint az emberek és a gépek egymás mellett dolgoznak. A robotok elsősorban azoknak a polcokon lévő termékeknek a kezelésére szolgálnak, amelyeket az emberek létra nélkül nem tudnak elérni, vagy amelyek túlzott hajolgatást igényelnének. Ez várhatóan nagyobb összhatékonysághoz vezet, miközben egyidejűleg csökkenti az emberi alkalmazottak munkaterhelését.
Az MIT tárgyérzékelő rendszere kezelésen keresztül: Intelligens "érzékelés" speciális érzékelők nélkül
Innovatív megközelítés a tárgyfelismerésben
Az Amazon Vulcanjával párhuzamosan az MIT, az Amazon Robotics és a British Columbia Egyetem kutatói kifejlesztettek egy olyan rendszert, amely más megközelítést alkalmaz a robotok tapintási képességeinek felruházásában. Ez a technológia lehetővé teszi a robotok számára, hogy felismerjék egy tárgy tulajdonságait, például a súlyát, puhaságát vagy tartalmát, egyszerűen azáltal, hogy felveszik és finoman megrázzák – hasonlóan ahhoz, ahogyan az emberek teszik, amikor ismeretlen tárgyakat kezelnek.
Ennek a megközelítésnek az a különlegessége, hogy nincs szükség speciális tapintásérzékelőkre. Ehelyett a rendszer a legtöbb robotban már meglévő ízületi kódolókat használja – olyan érzékelőket, amelyek mozgás közben érzékelik az ízületek forgási helyzetét és sebességét. Peter Yichen Chen, az MIT posztdoktora és a kutatási cikk vezető szerzője a projekt mögött álló víziót magyarázza: „Az álmom az lenne, hogy robotokat küldjek ki a világba, hogy megérinthessenek és mozgathassanak dolgokat, és önállóan felfedezhessék mindennek a tulajdonságait, amivel kölcsönhatásba lépnek.”.
Műszaki funkcionalitás és szimulációs modellek
Az MIT rendszer magját két szimulációs modell alkotja: az egyik a robotot és annak mozgását szimulálja, a másik pedig a tárgy dinamikáját másolja le. Chao Liu, egy másik MIT posztdoktor, hangsúlyozza ezeknek a digitális ikreknek a fontosságát: „A való világ pontos digitális másolata nagyon fontos a módszerünk sikeréhez.”.
A rendszer egy „differenciálható szimulációnak” nevezett technikát alkalmaz, amely lehetővé teszi az algoritmus számára, hogy megjósolja, hogyan befolyásolják egy tárgy tulajdonságainak, például a tömegének vagy a puhaságának apró változásai a robot ízületeinek végső helyzetét. Amint a szimuláció megegyezik a robot tényleges mozgásaival, a rendszer azonosította a tárgy helyes tulajdonságait.
A módszer egyik fő előnye a hatékonysága: az algoritmus másodpercek alatt elvégezheti a számításokat, és a működéshez csak a robot valós mozgáspályájára van szükség. Ez különösen költséghatékonysá és praktikussá teszi a rendszert a valós alkalmazásokhoz.
Alkalmazási lehetőségek és előnyök
A kifejlesztett technológia különösen hasznos lehet olyan alkalmazásokban, ahol a kamerák kevésbé hatékonyak, például tárgyak válogatásakor egy sötét pincében vagy törmelékeltakarításkor egy részben összeomlott épületben egy földrengés után.
Mivel az algoritmus betanításához nem szükséges nagy adathalmaz – ellentétben néhány olyan módszerrel, amelyek számítógépes látást vagy külső érzékelőket használnak –, kevésbé hajlamos a hibákra, amikor ismeretlen környezettel vagy új objektumokkal találkozik. Ez különösen robusztussá és sokoldalúvá teszi a rendszert.
A robotikában használt tapintásérzékelők szélesebb körű kutatási területe
Alapvető kihívások és jelenlegi megoldások
A tapintásérzékkel rendelkező robotok fejlesztése alapvető kihívások elé állítja a kutatókat. Míg az emberi tapintási rendszer rendkívül összetett és árnyalt, a mesterséges rendszereknek technológiai eszközökkel kell ezt lemásolniuk. Ken Goldberg, a Kaliforniai Egyetem, Berkeley robotikusa hangsúlyozza e feladat összetettségét: „Az emberi tapintási érzék hihetetlenül árnyalt és összetett, hatalmas dinamikus tartománnyal. Miközben a robotok gyorsan fejlődnek, meglepődnék, ha a következő öt-tíz évben emberi szintű tapintási érzékelőket látnék.”.
Ezen kihívások ellenére jelentős előrelépés történik a kutatásban. Például a Fraunhofer IFF olyan tapintásérzékelő rendszereket fejleszt, amelyek lehetővé teszik a reaktív megfogást, utánozzák az emberi kezet, és ideálisak törékeny vagy rugalmas tárgyak kezelésére. Az érzékelőadatokat a megfogó adaptálására, az alkatrész- és pozíciófelismerésre, valamint a folyamatfelügyeletre használják.
Innovatív kutatási projektek a tapintható robotika területén
Az Amazon és az MIT fejlesztései mellett más jelentős kutatási projektek is folynak a tapintható robotérzékelők területén:
A Max Planck Intelligens Rendszerek Intézete kifejlesztett egy Insight nevű haptikus érzékelőt, amely nagy érzékenységgel érzékeli az érintést. Georg Martius, az intézet kutatócsoportjának vezetője hangsúlyozza az érzékelő teljesítményét: „Érzékelőnk kiemelkedő teljesítményt nyújt a ház innovatív mechanikai kialakításának, a benne található egyedi tervezésű képalkotó rendszernek, az automatikus adatgyűjtésnek és a legmodernebb mélytanulási módszereknek köszönhetően.” Az érzékelő olyan érzékeny, hogy még a saját gravitációhoz viszonyított orientációját is képes érzékelni.
Egy másik érdekes projekt a DensePhysNet, egy olyan rendszer, amely aktívan végrehajt dinamikus interakciók sorozatát (pl. csúszás és ütközés), és mély prediktív modellt használ a vizuális megfigyelései felett, hogy sűrű, pixelenkénti reprezentációkat tanuljon, amelyek tükrözik a megfigyelt objektumok fizikai tulajdonságait. A szimulációban és a valós környezetben végzett kísérletek azt mutatják, hogy a tanult reprezentációk gazdag fizikai információkat tartalmaznak, és közvetlenül felhasználhatók olyan fizikai objektumok tulajdonságainak dekódolására, mint a súrlódás és a tömeg.
Ehhez kapcsolódóan:

A tapintható robotrendszerek jövőbeli kilátásai
Multimodális érzékelőrendszerek integrációja
A tapintható robotika jövője a különböző érzékszervi modalitások integrációjában rejlik. Az MIT kutatói már dolgoznak azon, hogy a mesterséges intelligenciát megtanítsák az olyan érzékszervek kombinálására, mint a látás és a tapintás. Azzal, hogy megértik, hogyan hatnak egymásra ezek a különböző érzékszervi modalitások, a robotok holisztikusabb képet alakíthatnak ki környezetükről.
Az MIT csapata már tervezi, hogy a tárgydetektálási módszerüket számítógépes látássérültekkel kombinálják, hogy egy még hatékonyabb multimodális érzékelőrendszert hozzanak létre. „Ez a munka nem próbálja meg lecserélni a számítógépes látást. Mindkét módszernek megvannak a maga előnyei és hátrányai. De itt megmutattuk, hogy ezek közül a tulajdonságok közül néhányat már kamera nélkül is felfedezhetünk” – magyarázza Chen.
Kibővített alkalmazási területek és jövőbeli fejlesztések
Az MIT kutatócsapata a komplexebb robotikai rendszerekkel, például lágy robotokkal és összetettebb tárgyakkal, például lötyögő folyadékokkal vagy szemcsés közegekkel, például homokkal végzett alkalmazások lehetőségét is fel kívánja tárni. Hosszú távon azt remélik, hogy ezt a technikát felhasználhatják a robotok tanulásának javítására, lehetővé téve a jövő robotjai számára, hogy gyorsan új manipulációs készségeket sajátítsanak el, és alkalmazkodjanak a környezetük változásaihoz.
Az Amazon a következő években a Vulcan technológia további fejlesztését és nagyobb léptékű bevezetését tervezi. A Vulcan integrálása a vállalat meglévő, 750 000 mobil robotból álló flottájával egy átfogó automatizálási koncepciót sugall, amely alapvetően átalakíthatja a logisztikai ágazatot.
Tapintási tanulás: Amikor az érzékelők tapintási érzetet adnak a robotoknak
Az Amazon Vulcanja és az MIT tárgyfelismerő rendszere által példázott tapintásérzékkel rendelkező robotok kifejlesztése döntő fordulópontot jelent a robotikában. Ezek a technológiák lehetővé teszik a robotok számára, hogy olyan feladatokat is ellássanak, amelyek korábban kizárólag az emberek felségterülete voltak, mivel ezek finommotoros készségeket és tapintási megértést igényelnek.
A különböző megközelítések – az Amazon specializált érzékelőkre való összpontosítása és az MIT koncepciója, amely a meglévő érzékelőket használja a haptikus következtetéshez – jól mutatják a kutatási irányok sokszínűségét ezen a területen. Mindkét megközelítésnek megvannak a maga sajátos erősségei és alkalmazási területei.
A tapintási képességek robotikai rendszerekbe való egyre növekvő integrációjával új lehetőségek nyílnak meg az összetett feladatok automatizálására a logisztikában, a gyártásban, az egészségügyben és számos más területen. A robotok azon képessége, hogy nemcsak látják, hanem „érzik” is a környezetüket, jelentős lépéssel közelebb visz minket egy olyan jövőhöz, amelyben a robotok és az emberek még szorosabban és intuitívabban tudnak együttműködni.
Ehhez kapcsolódóan: