A nagy teherbírású robotok csendes forradalma a gépészetben: Miért a mesterséges intelligencia a döntő tényező a legerősebb robotok kiválasztásában – Creative image Xpert.Digital
Erősebb, mint valaha – és most már okos is: Erre képesek az új szuperrobotok
### Felejtsd el a gyárakat: Ezek a robotóriások most meghódítják az építkezéseket és a szélerőműveket ### Nincs szükség többé ketrecekre: Hogyan válnak a többtonnás robotok biztonságos csapattársakká az emberek számára ### A megoldás a szakképzett munkaerő hiányára? Ezek a robotok veszik át a világ legnehezebb munkáit ### A titánok összecsapása: Nem az erő, hanem a szoftver dönti el, hogy ki építi a legjobb robotot ###
Az erő evolúciója: Legújabb fejlesztések a nagy teljesítményű, nehéz teherbírású robotok terén
A nehézgép-robot szektor mélyreható átalakuláson megy keresztül, amely messze túlmutat a hasznos teher és a hatótávolság növelésén. A legújabb fejlemények paradigmaváltást mutatnak egy holisztikus megközelítés felé, amely az intelligenciát, az alkalmazkodóképességet, a felhasználóbarát jelleget és az új alkalmazások fejlesztését helyezi előtérbe. A szoftverek, a mesterséges intelligencia (MI) és a fejlett mechatronika váltak az elsődleges értékteremtő tényezőkké, lehetővé téve ezeknek a nagy teljesítményű gépeknek, hogy dinamikus környezetekben komplex feladatokat oldjanak meg, gyakran közvetlen együttműködésben az emberi munkavállalókkal. A főbb trendek közé tartozik a hagyományos ipari robotok és az együttműködő rendszerek (kobotok) közötti határok egyre növekvő elmosódása, az olyan ágazatokba való terjeszkedés, mint az építőipar és a megújuló energia, valamint a teljes birtoklási költség (TCO) és a fenntarthatóság növekvő fontossága. Ezek a fejlemények határozzák meg a nehézgép-robotok következő generációját, amelyek nemcsak erősebbek, de ami még fontosabb, intelligensebbek, rugalmasabbak és könnyebben hozzáférhetők.
A nagy teherbírású robotok új generációja: Újraértelmezi az erőt és a pontosságot
A nagy teherbírású robotok piaca a maximális hasznos teherért folytatott tiszta versenyből egy diverzifikált környezetté fejlődik, ahol az alkalmazásspecifikus teljesítmény és hatékonyság kerül középpontba. A vezető gyártók a teljesítmény, a sebesség, a kompakt méret és az intelligens tervezés kombinációjával különböztetik meg termékeiket.
A modern nehézgépjármű-kategória meghatározása: Több, mint nyers erő
A nagy teherbírású robotokat jellemzően 250 kg-tól kezdődő és/vagy 4 méternél nagyobb kinyúlást igénylő terhek kezelésére tervezték. Olyan iparágak gerincét alkotják, mint az autóipar, a gépészet, az öntödék és egyre inkább az építőipar, ahol hatalmas alkatrészeket, például motorblokkokat, acélgerendákat és teljes járműkarosszériákat mozgatnak. A hasznos teherbírás skálája hatalmas, több száz kilogrammtól a jelenlegi csúcsig, 2300 kg-ig terjed.
A modern nagy teherbírású robotok értékelése azonban sokat fejlődött. Míg a maximális hasznos teher továbbra is kulcsfontosságú kritérium, egyre inkább a holisztikus hatékonysági mutatók kerülnek előtérbe. Ezek közé tartozik a hasznos teher/tömeg arány, a szükséges helyigény, az energiafogyasztás, valamint a nagy tehetetlenségi nyomatékú terhek pontos és dinamikus kezelésének képessége. Ezek a kritériumok a teljes birtoklási költség és a modern, rugalmas termelési környezetek követelményeinek mélyebb megértését tükrözik.
Versenyképes környezet és zászlóshajó modellek (2024-2026)
A piacot olyan elismert szereplők uralják, mint a KUKA, a Fanuc, az ABB és a Yaskawa, miközben az új versenytársak, mint például a kínai Estun, egyre nagyobb jelentőségre tesznek szert. Ezen vállalatok stratégiái figyelemre méltó eltérést mutatnak, amely túlmutat a hasznos teherbírás maximalizálásán.
A Fanuc továbbra is vitathatatlan piacvezető az ultra-nehéz szegmensben az M-2000iA sorozatával. Az M-2000iA/2300 modell 2,3 tonna teherbírásával a világ legerősebb 6 tengelyes csuklós robotja, és ideálisan alkalmas az abszolút maximális szilárdságot igénylő feladatokhoz, például komplett járműalvázak emeléséhez.
A KUKA az optimalizált teljesítmény stratégiáját követi. Míg a KR FORTEC ultra sorozat akár 800 kg-os teherbírást is kínál, kivételesen jó teherbírás-tömeg arány és kompakt kialakítás jellemzi. Ezt olyan innovatív tervezési jellemzőknek köszönhetően érik el, mint a dupla karú rendszer, amely a súly túlzott növelése nélkül növeli a merevséget. Palettázási alkalmazásokhoz a KR 1000 titan sorozat akár 1300 kg-os teherbírású modelleket kínál.
Az ABB az IRB 8700 zászlóshajó robotját kategóriájának leggyorsabb robotjaként pozicionálja. Akár 800 kg-os (vagy döntött csuklóval 1000 kg-os) teherbírásával állítólag 25%-kal gyorsabb ciklusidőket ér el, mint a hasonló modellek. Az ABB a megbízhatóságát is hangsúlyozza az egyszerűsített mechanikai kialakítás révén, amelyben tengelyenként csak egy motor és sebességváltó található, ami csökkenti a karbantartási igényt és a teljes birtoklási költséget.
A Yaskawa széles portfóliót kínál, amely magában foglalja a 600 kg teherbírású Motoman MH600-at. Párhuzamos illesztéseinek kialakítása nagy stabilitást és merevséget biztosít, ami különösen előnyös nagy tehetetlenségi nyomatékú munkadarabok kezelésekor. A GP sorozat nagy sebességű alkalmazásokhoz készült.
Olyan feltörekvő versenytársak is megjelennek a piacon, mint az Estun és a Kawasaki. Az Estun, Kína legnagyobb ipari robotgyártója, olyan modellek bevezetését tervezi Európában, mint az 1000 kg hasznos teherbírású ER 13300. A Kawasaki bővíti portfólióját az MXP710L (710 kg) és az M-sorozattal, amely akár 1500 kg-ot is képes kezelni.
Ezek a különböző megközelítések azt mutatják, hogy a nagy teherbírású robotok piaca az egydimenziós versenytől a legnagyobb hasznos teherért egy differenciáltabb versenykörnyezetté fejlődött. A gyártók ma már a konkrét ügyféligényekhez igazított, speciális teljesítményjellemzők alapján versenyeznek – legyen szó maximális erőről, hatékonyságról zárt térben vagy maximális sebességről. Ez lehetővé teszi a felhasználók számára, hogy az egyedi termelési körülményeikhez optimalizált megoldást válasszák, ahelyett, hogy egyszerűen a legerősebb elérhető modellt választanák.
Robotóriások: A legerősebb ipari robotok összehasonlítása
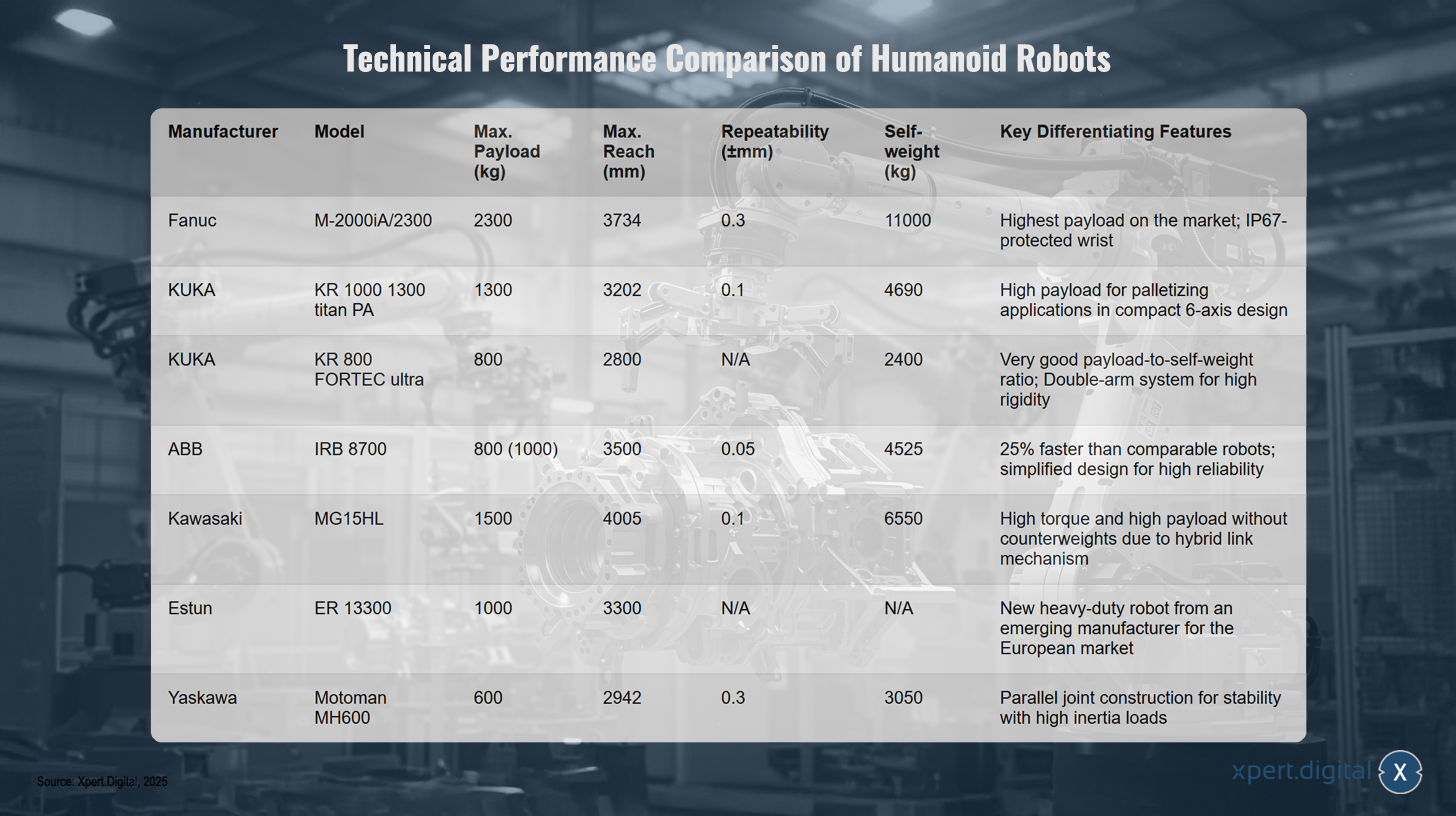
Robotóriások: A legerősebb ipari robotok összehasonlítása – Kép: Xpert.Digital
Az ipari robotok világában számos lenyűgöző óriás tűnik ki hatalmas teherbírásukkal és műszaki specifikációikkal. Olyan gyártók, mint a Fanuc, a KUKA, az ABB, a Kawasaki, az Estun és a Yaskawa versengenek a vezető pozícióért ebben a piaci szegmensben.
A Fanuc M-2000iA/2300 kivételes, 2300 kg-os teherbírásával tűnik ki, és IP67-es védelemmel ellátott csuklóval is rendelkezik. A KUKA bemutatja a KR 1000 1300 titan PA robotot, amely 1300 kg-os teherbírással rendelkezik, ideális palettázási alkalmazásokhoz, és kompakt, 6 tengelyes kialakítással büszkélkedhet. Az ABB IRB 8700 a hasonló modellekhez képest 25%-kal nagyobb sebességgel és a maximális megbízhatóság érdekében egyszerűsített kialakítással rendelkezik.
A Kawasaki MG15HL hibrid lengőkaros mechanizmust használ, amely nagy nyomatékot és hasznos teherbírást tesz lehetővé további ellensúlyok nélkül. A Yaskawa Motoman MH600 lenyűgöző párhuzamos lengőkaros kialakításával tűnik ki, amely stabilitást garantál nagy tehetetlenségi nyomatékú terhelések esetén is.
Egy érdekes újdonság az Estun ER 13300, egy nagy teherbírású robot, amely az európai piac meghódítására törekszik. Ezek a robotok lenyűgözően demonstrálják az ipari automatizálás technológiai fejlődését és a vezető gyártók folyamatos innovációját.
Az intelligencia motorja: MI és szoftver, mint kulcsfontosságú megkülönböztető jellemzők
A nagy teherbírású robotok terén elért legjelentősebb fejlesztések már nem pusztán mechanikai jellegűek. Inkább a robotika, a mesterséges intelligencia és a fejlett szoftverek fúziója az, ami alapvetően bővíti ezen gépek képességeit és forradalmasítja működésüket.
Az automatizálástól az autonómiáig: A mesterséges intelligencia és a gépi tanulás hatása
A mesterséges intelligencia és a gépi tanulás (ML) az ipari robotokat merev, előre programozott eszközökből adaptív, intelligens rendszerekké alakítja, amelyek képesek érzékelni, dönteni és tanulni. Ez az átalakulás kulcsfontosságú a modern gyártási és logisztikai folyamatok változékonyságának és összetettségének kezeléséhez.
Fejlett érzékelés (a „szemek”)
A modern robotok már nem vakon dolgoznak. Rendkívül kifinomult érzékelőrendszerekkel vannak felszerelve, beleértve a 2D-s és 3D-s látórendszereket, a LiDAR-t és a sztereó kamerákat, amelyek átfogó képet adnak a környezetükről. Ezt az érzékelési képességet mélytanuló algoritmusok vezérlik az objektumfelismerés, -lokalizáció és -szegmentálás terén, ami eleve lehetővé teszi a strukturálatlan környezetekben való használatukat.
Használati eset – Konténeres komissiózás: Az olyan rendszerek, mint a KUKA.SmartBinPicking, fejlett képfeldolgozást használnak a konténerben véletlenszerűen elrendezett tárgyak azonosítására, megfogási pontjaik meghatározására és biztonságos eltávolítására – ez a feladat gyakorlatilag lehetetlen a hagyományos, szabályalapú programozással.
Használati eset – Építési terület felismerése: A kutatás aktívan fejleszti a YOLO-alapú (You Only Look Once, azaz csak egyszer nézel rá) tárgyfelismerő modelleket. Ezek lehetővé teszik a robotok számára, hogy azonosítsák a munkásokat, járműveket és épületszerkezeteket a dinamikus építkezéseken, ami alapvető követelmény az ilyen összetett környezetekben való autonóm működéshez.
Intelligens feladatkezelés (az „agy”)
A mesterséges intelligencia nemcsak a látást, hanem a cselekvést is segíti. A gépi tanulási modellek lehetővé teszik a robotok számára, hogy valós időben igazítsák cselekedeteiket a változó körülményekhez.
Használati eset – MI-vezérelt kirakodás palettáról: A FANUC MI-vezérelt látórendszereket használ, hogy a robotok automatikusan kirakodhassák a különböző méretű és pozíciójú dobozokból álló vegyes raklapokat. Az ilyen rendszerek percenként több mint kilenc dobozt tudnak feldolgozni, így kiváltva a rendkívül megerőltető kézi munkát.
Használati eset – MI-vel támogatott hegesztés: A következő generációs rendszerek, mint például a NovAI™, gépi látást és mesterséges intelligenciát használnak az adaptív, valós idejű hegesztéshez. Képesek nyomon követni a hegesztési varratokat, alkalmazkodni a résméretekhez és a toldalékvarratokhoz, valamint dinamikusan korrigálni a hegesztési paramétereket. Ez automatizálja azokat a folyamatokat, amelyeket korábban az alkatrész-tűrések miatt túl következetlennek tartottak a robotika számára, és jelentős előrelépést jelent a nehézgép-építőiparban olyan iparágakban, mint a hajógyártás.
A felhasználóbarátság forradalma: a bonyolultság egyszerűsítése fejlett szoftverekkel
Hagyományosan az ipari robotok programozása egy magasan specializált feladat volt, amely olyan saját programozási nyelvek alapos ismeretét igényelte, mint a KRL (KUKA) vagy a RAPID (ABB). Ez magas belépési korlátot jelentett, és lassította az automatizálási megoldások bevezetését.
Következő generációs operációs rendszerek
A vezető gyártók erre a szűk keresztmetszetre új, intuitív operációs rendszerek fejlesztésével reagálnak, amelyek célja a robotok működésének demokratizálása.
KUKA iiQKA.OS: Egy modern, Linux alapú operációs rendszer webes felhasználói felülettel (iiQKA.UI), amelyet úgy terveztek, hogy olyan könnyen használható legyen, mint egy okostelefon. Támogatja az utasításalapú programozást, lehetővé teszi a virtuális üzembe helyezést, és úgy tervezték, hogy elősegítse egy harmadik féltől származó alkalmazások és hardverek teljes ökoszisztémájának (a „Robotikus Köztársaság”) támogatását.
FANUC iHMI: Az „Intelligens ember-gép interfész” egy grafikus, érintőképernyős felhasználói felület, amelyet a beállítási és betanítási idők drasztikus csökkentésére terveztek. Egyetlen, felhasználóbarát felületen integrálja a tervezési, szerkesztési és fejlesztési eszközöket, például a ciklusidő-becslést és a karbantartás-menedzsmentet.
A programozás demokratizálása
A trend egyértelműen a kódmentes vagy alacsony kódigényű interakció felé halad. A drag-and-drop funkcióval és grafikus munkafolyamat-szerkesztőkkel rendelkező vizuális programozási környezetek válnak szabvánnyá. A „demonstrációval történő tanítás” módszerek, ahol a kezelő manuálisan vezeti a robotkart egy mozgáson keresztül (manuális irányítás), vagy külső eszközöket, például a Wandelbots Tracepen-t használ a feladat „bemutatására” a robotnak, tovább csökkentik a programozási korlátokat.
A szimuláció ereje (digitális ikrek)
Az olyan offline programozó és szimulációs szoftverek, mint a KUKA.Sim vagy az ABB RobotStudio, nélkülözhetetlen eszközzé váltak. Lehetővé teszik a vállalatok számára, hogy virtuálisan tervezzenek, teszteljenek és optimalizáljanak komplett robotcellákat, még a fizikai hardver megrendelése előtt. Ez a „virtuális üzembe helyezés” jelentősen csökkenti a tényleges beállítási időt, minimalizálja a kockázatokat az ütközések vagy a hozzáférhetőségi problémák korai felismerésével, és lehetővé teszi a programozás párhuzamos elvégzését a hardverbeszerzéssel.
Ezek a fejlemények alapvető változást jeleznek a robotikában. A gyártók már nem egyszerűen egy vezérlővel ellátott robotkart árulnak, hanem teljes digitális platformokat építenek. Ezek a platformok operációs rendszereket, alkalmazásboltokat, partnerhálózatokat és felhőalapú kapcsolódást tartalmaznak. A KUKA aktívan népszerűsíti az iiQKA partner ökoszisztémáját ("Robotic Republic"), amely nyílt interfészeket kínál harmadik fél szolgáltatók számára. Ugyanakkor az olyan platformok, mint a Bosch Rexroth ctrlX AUTOMATION rendszere, lehetővé teszik a különböző márkák (ABB, KUKA, FANUC) robotjainak vezérlését egy egységes interfészen keresztül. Ez a fejlemény tükrözi az okostelefon-piac átalakulását, ahol egy eszköz értékét nagymértékben az alkalmazás-ökoszisztémája határozza meg. A versenyhelyzet így a pusztán hardverspecifikációktól a szoftver-ökoszisztéma erősségére és nyitottságára tolódik el. A felhasználók számára ez azt jelenti, hogy kevesebb függőség van egyetlen gyártótól, gyorsabb innovációt és hozzáférést biztosít a speciális megoldások szélesebb köréhez. A robot hardverplatformmá válik, amelyre egy szoftveresen definiált automatizálási megoldás épül.
🎯🎯🎯 Profitáljon az Xpert.Digital széleskörű, ötszörös szakértelméből egyetlen átfogó szolgáltatáscsomagban | BD, K+F, XR, PR és digitális láthatóság optimalizálása


Profitáljon az Xpert.Digital széleskörű, ötszörös szakértelméből egy átfogó szolgáltatáscsomagban | K+F, XR, PR és digitális láthatóság optimalizálása - Kép: Xpert.Digital
Az Xpert.Digital mélyreható ismeretekkel rendelkezik a különböző iparágakban. Ez lehetővé teszi számunkra, hogy személyre szabott stratégiákat dolgozzunk ki, amelyek pontosan illeszkednek az Ön konkrét piaci szegmensének követelményeihez és kihívásaihoz. A piaci trendek folyamatos elemzésével és az iparági fejlemények nyomon követésével proaktívan tudunk cselekedni és innovatív megoldásokat kínálni. A tapasztalat és a szakértelem kombinációja hozzáadott értéket teremt, és döntő versenyelőnyt biztosít ügyfeleink számára.
További információ itt:
Új mechatronika: Hogyan feszegetik a nagy teherbírású robotok a fizikai határokat
Haladó mechatronika: A hatalom fizikai evolúciója
A szoftverek és a mesterséges intelligencia gyors fejlődésével párhuzamosan a nagy teherbírású robotok fizikai formája is fejlődik. A tervezés, az anyagtudomány és az effektortechnológia terén elért innovációk kulcsfontosságúak ahhoz, hogy ezt a megnövekedett intelligenciát mechanikai teljesítménygé alakítsuk.
Innovációk a tervezésben és az anyagokban: Nagyobb teljesítmény kisebb tömeggel
Kulcsfontosságú trend a könnyebb és kompaktabb robotok fejlesztése, miközben azonos vagy akár nagyobb teherbírást kínálnak. A KUKA KR Fortec például akár 700 kg-mal könnyebb elődjénél, míg a KR FORTEC ultra sorozat kategóriaelső teherbírás-tömeg aránnyal büszkélkedhet. Ez a súlycsökkentés csökkenti az alapozási követelményeket, csökkenti az energiafogyasztást, és lehetővé teszi a sűrűn lakott és térben korlátozott gyártóüzemekben való alkalmazást.
Ezt fejlett kinematikai koncepciók teszik lehetővé. A KUKA kettős karú rendszere és a Fanuc rendkívül merev karjai javítják a pontosságot és csökkentik a rezgéseket nagy sebességnél és nehéz terhelések esetén. A Kawasaki hibrid összekötő mechanizmusa kiküszöböli a nagyméretű ellensúlyok szükségességét, így növeli a robot munkaterületét.
Egy másik fontos szempont a modularitás. Az olyan robotsorozatok, mint a KUKA robotjai (KR Quantec, Fortec, Fortec ultra), egyre inkább közös alkatrészeket használnak, például a központi kezeket. Ez leegyszerűsíti a karbantartást és csökkenti a pótalkatrész-készletezési költségeket a diverzifikált robotflottát üzemeltető ügyfelek számára.
Szélsőséges környezetben való használatra ma már szabványosak a speciális változatok, mint például a „Foundry” vagy a „Hygienic” verziók. Ezek a modellek IP67-es védelemmel ellátott csuklóval és testtel, hő- és korrózióálló bevonatokkal, valamint élelmiszeripari minőségű kenőanyagokkal rendelkeznek, lehetővé téve öntödékben, kovácsműhelyekben vagy élelmiszer-feldolgozó üzemekben való használatukat.
Következő generációs effektorok: A robot kezei
A robotkar végén található megfogók, más néven end effektorok, az egyszerű pneumatikus szorítóktól az összetett mechatronikai rendszerekig fejlődnek. Egyre inkább fejlett érzékelőkkel vannak felszerelve, amelyek adaptív funkcionalitást biztosítanak. Bár még mindig elsősorban az alacsonyabb hasznos terhelésű alkalmazásokban találhatók meg, a lágy robotika és a bionika alapelvei befolyásolják a megfogó technológiát. A cél az, hogy nagyobb mennyiségű tárgyat és anyagot lehessen kezelni nagyobb megbízhatósággal és kisebb erőkifejtéssel. Nehéz és összetett tárgyakhoz többtengelyes, teljesen meghajtott mechanizmusokat fejlesztenek, amelyek lehetővé teszik a precíz manipulációt.
A csuklóra szerelt erő-nyomaték érzékelők „tapintásérzetet” adnak a robotnak. Lehetővé teszik számára olyan finom feladatok elvégzését, mint az alkatrészek precíz összeillesztése, meghatározott erő alkalmazása köszörülés közben, vagy a váratlan ütközésekre való biztonságos reagálás.
Az érzékelő ökoszisztéma: az érzékelés és a biztonság alapja
A modern, nagy teherbírású robotok gazdag belső és külső érzékelők ökoszisztémájára támaszkodnak. A belső érzékelők, mint például a motorjeladók és a nyomatékérzékelők az ízületekben, elengedhetetlenek a pontos mozgásvezérléshez. A külső érzékelők, mint például a 3D-s kamerák, a LiDAR és az ultrahangos érzékelők, adatokat szolgáltatnak a környezet érzékeléséhez, és lehetővé teszik a biztonságos ember-robot együttműködést. Az integrált ütközés- és túlterhelésvédelmi rendszerek ütközés vagy túlzott terhelés esetén vészleállítást indíthatnak el, így védve mind a robotot, mind a munkadarabot. Ezek a rendszerek egyre kifinomultabbak, és ma már olyan funkciókat kínálnak, mint a pneumatikusan állítható kioldási küszöbértékek.
Fenntarthatóság és hatékonyság: A teljes tulajdonlási költség (TCO) a középpontban
Az energiahatékonyság kulcsfontosságú tervezési céllá vált. A könnyűszerkezetes konstrukció, a szoftveresen optimalizált mozgáspályák és az energiatakarékos készenléti üzemmódok révén a gyártók csökkentik robotjaik energiafogyasztását. Ez nemcsak az üzemeltetési költségeket csökkenti, hanem az automatizálási megoldás környezeti lábnyomát is javítja. Az egyszerűsített mechanikai kialakítás, mint például az ABB által alkalmazott, tengelyenként csak egy motorral rendelkező megoldások, és a moduláris felépítés nagyobb megbízhatósághoz (átlagos meghibásodási idő, MTBF) és gyorsabb javítási időhöz (átlagos javítási idő, MTTR) vezet, tovább csökkentve az általános üzemeltetési költségeket.
A mechatronika fejlődése szorosan összefonódik a szoftverek és a mesterséges intelligencia fejlesztéseivel. A merevebb, kevésbé rezgésre hajlamos karszerkezet (hardverfejlesztés) előfeltétele a fejlett mozgásvezérlő szoftvereknek (szoftverfejlesztés), amelyek lehetővé teszik a robot gyorsabb és pontosabb mozgását. A mesterséges intelligencia alapú pályatervezési algoritmusok ezután kiszámíthatják a leginkább energiahatékony pályát pontosan ehhez a kinematikához. Az integrált erő-nyomaték érzékelők viszont valós idejű visszajelzést adnak, lehetővé téve a vezérlőszoftver számára, hogy reagáljon a váratlan erőkre, és robusztusabbá tegye a folyamatot. Egy modern, nagy teherbírású robot teljesítménye tehát a teljes rendszer egy újonnan megjelenő tulajdonsága, amelyben a mechanika, az érzékelők és a szoftver elválaszthatatlanul összekapcsolódnak.
Kiterjesztett horizontok: Új alkalmazási területek a nehézgép-robotok számára
A mesterséges intelligencia, a szoftverek és a mechatronika technológiai fejlődése lehetővé teszi a nagy teherbírású robotok használatát azokban az iparágakban, amelyek korábban a kézi munkára vagy a merev automatizálásra támaszkodtak. A robotok elhagyják az ellenőrzött gyártócsarnokokat, és meghódítják a dinamikus és strukturálatlan környezeteket.
Az automatizált építkezés
Az építőipar hatalmas kihívásokkal néz szembe a szakképzett munkaerő hiánya, a magas biztonsági kockázatok és a növekvő termelékenységi nyomás miatt. Ennek eredményeként az építőipari vállalatok 81%-a tervezi, hogy a következő tíz évben bevezeti a robotokat.
Alkalmazások: A nagy teherbírású robotok hatalmas alkatrészeket, például acélprofilokat, előregyártott betonelemeket és moduláris házegységeket kezelnek. Automatizált gyártáshoz használják őket, például nagy alkatrészek fúrásához, szegecseléséhez és rögzítéséhez. Konkrét példa erre a Fischer BauBot, amelyet kifejezetten nagy építkezéseken végzett fúrási és rögzítési munkákhoz fejlesztettek ki. A robotok vágószerszámokkal is felszerelhetők, hogy a beton- és acél alkatrészeket nagy pontossággal dolgozzák fel a helyszínen.
Kulcsfontosságú technológiák: Ebben a strukturálatlan környezetben a siker kritikusan függ az anyagok és akadályok azonosítására szolgáló mesterséges intelligencia alapú tárgyfelismeréstől, valamint a robusztus, mobil platformoktól.
A jövő energiája: Automatizálás a megújuló energiatermelésben
A megújuló energiaforrások hatalmas térnyerése a nagyméretű alkatrészek, például a szélturbina-lapátok és a naperőművek gyorsabb és költséghatékonyabb gyártását és telepítését igényli.
Szélenergia: A szélturbina-lapátok gyártása során robotokat használnak az utófeldolgozáshoz (vágás, csiszolás, töltés), ami javítja a minőséget és mentesíti a munkavállalókat a veszélyes feladatok alól. Az automatizált szálelhelyezés (AFP) során a robotkarok precízen lefektetik a szénszálas vagy üvegszálas csíkokat, hogy könnyebb és erősebb rotorlapátokat hozzanak létre. Speciális robotrendszerek dolgozzák fel a lapát tövét (fűrészelés, marás, fúrás), és akár 50%-kal csökkentik a ciklusidőket a hagyományos gépekhez képest.
Napenergia: Olyan cégek, mint a Charge Robotics és a Terabase, mobil „gyárakat” fejlesztenek, amelyek automatikusan előszerelik és telepítik a napelemek teljes részeit közvetlenül a naperőmű építési területein, potenciálisan megduplázva a termelékenységet. Az AES „Maximo” robotja mesterséges intelligenciát, LiDAR-t és gépi látást használ a napelemek nehéz emelésének és összeszerelésének automatizálására, akár 50%-kal csökkentve az időt és a költségeket. A Comau Hyperflex rendszere egy félpótkocsiban elhelyezett mobil gyár, amely közvetlenül a terepen szereli össze és telepíti a napelemkövetőket.
A nehézipar modernizációja: Hajóépítés és repülőgépipar
Hajóépítés: Ez a hagyományosan alacsony automatizálási igényű iparág mobil nagy teherbírású robotokat kezd használni. Az MR4Weld, amelyet a Comau fejlesztett ki a Fincantieri hajógyárral együttműködve, egy autonóm mobil hegesztőrobot, amely képes navigálni a hajógyár strukturálatlan környezetében, és hegesztési munkákat végezni nagy hajótest-szakaszokon. Ez új rugalmasságot és hatékonyságot biztosít a hatalmas acélszerkezetek összeszerelésében.
Repülőgépipar: Itt nagy pontosságú, nagy teherbírású robotokat használnak nagy repülőgép-alkatrészek, például szárnyak és törzsalkatrészek fúrására, szegecselésére és összeillesztésére, ahol a legnagyobb pontosságra és ismétlési pontosságra van szükség.
A körforgás lezárása: A körforgásos gazdaság szerepe
A fenntarthatósági célok és az uniós szabályozások előmozdítják az összetett termékek hatékony újrahasznosításának és újrafeldolgozásának szükségességét.
Automatizált szétszerelés: A nagy teherbírású robotok ideálisak nagy és nehéz termékek szétszerelésére.
Elektromos járművek akkumulátorai: Nagy súlyuk és potenciális veszélyeik (elektromos, kémiai) miatt az elektromos járművek akkumulátorainak robotizált szétszerelése kulcsfontosságú tényező a biztonságos és gazdaságos újrahasznosítás szempontjából. Kutatási projektek folynak olyan robotcellák fejlesztése mellett, amelyek automatikusan elválasztják az akkumulátormodulokat és a cellákat.
Nagy elektronika és motorok: A Fraunhofer Intézet olyan robotrendszereken dolgozik, amelyek mesterséges intelligenciát és gépi látást használnak a számítógépek, mosógépek és villanymotorok automatikus szétszerelésére, hogy értékes anyagokat, például rezet és ritkaföldfém-mágneseket kinyerjenek. Ez fontos lépés a „városi bányászat” bevezetése felé.
Ezeknek az új alkalmazási területeknek van egy közös vonásuk: a robotot a gyártócsarnok erősen strukturált, kiszámítható környezetéből egy dinamikus, strukturálatlan és gyakran zord „mezőre” helyezik át. Ez a környezetváltozás a mesterséges intelligencia, az érzékelőtechnológia és a mechatronika technológiai fejlesztéseinek elsődleges mozgatórugója. A technikai kihívás az ismétlődő mozgások optimalizálásáról a bizonytalanság kezelésére helyeződik át. A jövőbeli siker kevésbé a sebesség vagy a pontosság fokozatos javulásától, és inkább a környezetérzékelés, az autonóm navigáció és az adaptív feladattervezés áttöréseitől függ.
Ajánlásunk: 🌍 Korlátlan elérhetőség 🔗 Kapcsolódó 🌐 Többnyelvű 💪 Értékesítési erő: 💡 Hiteles stratégia 🚀 Az innováció találkozása 🧠 Intuíció


A helyitől a globálisig: a kkv-k okos stratégiával meghódítják a világpiacot - Kép: Xpert.Digital
Egy olyan korban, amikor egy vállalat digitális jelenléte határozza meg a sikerét, a kihívás a hiteles, személyre szabott és széleskörű jelenlét megteremtésében rejlik. Az Xpert.Digital egy innovatív megoldást kínál, amely egy iparági központ, egy blog és egy márkanagykövet metszéspontjaként pozicionálja magát. Egyetlen platformon ötvözi a kommunikációs és értékesítési csatornák előnyeit, és 18 különböző nyelven teszi lehetővé a publikálást. A partnerportálokkal való együttműködés, valamint a cikkek Google Hírekben és egy körülbelül 8000 újságírót és olvasót tartalmazó sajtóterjesztési listán való közzétételének lehetősége maximalizálja a tartalom elérését és láthatóságát. Ez kulcsfontosságú tényező a külső értékesítésben és marketingben (SMarketing).
További információ itt:
Növekedés, lehetőségek, akadályok: Stratégiák a nehézgépjármű-robotikához
Az együttműködés határterülete: Biztonságos ember-robot interakció nagy hasznos terheléssel
Egy új és látszólag ellentmondásos trend az együttműködési elvek alkalmazása a potenciálisan halálos erők kifejtésére képes robotoknál. Ez a fejlesztés a nagy teherbírású robotokat elszigetelt gépekből erőteljes csapattársakká alakítja.
A ketrecen túl: Az együttműködés spektruma
A nagy teherbírású robotok biztonsági burkolatokon belüli üzemeltetésének hagyományos biztonsági koncepciója nem hatékony, és mereven elválasztja az emberi és gépi feladatokat. A modern ember-robot együttműködés (HRC) azonban nem egyetlen koncepció, hanem az egyszerű együttéléstől (a robot megáll, amikor egy személy belép a munkaterületére) a szoros együttműködésig (ember és robot egyidejűleg dolgozik ugyanazon a munkadarabon) terjedő spektrum.
Ennek a megközelítésnek a legfontosabb előnye, hogy a hagyományos könnyű kobotokkal ellentétben az együttműködő ipari robotokra nem vonatkoznak a teherbírás, a sebesség vagy a pontosság tekintetében fennálló korlátozások. Így mindkét világ legjavát kínálják: az ipari robotok teljesítményét és az együttműködő alkalmazások rugalmasságát.
Kulcsfontosságú technológiák a biztonságos, nagy teherbírású MRK-hoz
A nagy teherbírású robotokkal való biztonságos ember-robot együttműködést fejlett érzékelők és intelligens vezérlőfunkciók kombinációja teszi lehetővé.
Fejlett biztonsági érzékelők: A biztonságos ember-robot együttműködés (HRC) alapja a rendszer azon képessége, hogy érzékelje az emberi jelenlétet és szándékokat. Ezt biztonsági tanúsítvánnyal rendelkező lézerszkennerek, 3D kamerák és akár nyomásérzékeny padlók segítségével érik el, amelyek dinamikus, többrétegű védőmezőket hoznak létre a robot körül.
Sebesség- és távolságfigyelés (SSM): Ez egy kulcsfontosságú együttműködésen alapuló módszer, ahol a robot sebessége fordítottan arányos az embertől való távolságával. Ahogy egy személy közeledik, a robot lelassul. Ha a személy túl közel kerül, a robot biztonságosan megfigyelt módon megáll. Ez lehetővé teszi a zökkenőmentes és hatékony interakciót fizikai akadályok nélkül.
Teljesítmény- és erőkorlátozás (PFL): Bár a nagy teherbírású robotok nagy tehetetlensége miatt kihívást jelent, a fejlett vezérlőrendszerek és az egyes ízületekben található nyomatékérzékelők lehetővé teszik, hogy bizonyos feladatoknál még a nagyméretű robotok is erőkorlátozott üzemmódban működjenek. Váratlan érintkezés esetén azonnal leállnak. Ezt a funkciót gyakran használják kézi irányításhoz vagy átviteli feladatokhoz.
Szabványosítás és kockázatértékelés: A biztonságos ember-robot együttműködési (HRC) alkalmazások megvalósítását olyan szabványok szabályozzák, mint az EN ISO 10218 és az ISO/TS 15066 műszaki előírás. Alapvető követelmény a teljes alkalmazás – azaz a robot, a megfogó, a munkadarab és a környezet – gondos kockázatértékelése. Még egy eredendően biztonságos robot is képes veszélyes szerszámokat kezelni.
Ezek a fejlemények a „kobot” kifejezés újraértelmezéséhez vezetnek. Hagyományosan ez a kifejezés a kicsi, könnyű és eredendően biztonságos robotkarok szinonimája volt. Az együttműködő funkciók nagy teherbírású ipari robotokba való integrálása ezt a paradigmát megtöri. Az „együttműködő” szó főnévből (robottípus, „kobot”) melléknévvé vagy funkciók halmazává („együttműködő robotalkalmazás”) fejlődik. A jövő nem a „kobot” és az „ipari robot” közötti bináris választásban rejlik, hanem egy megfelelő teherbírású és teljesítményű ipari robot kiválasztásában, amelyet aztán felszerelnek az adott alkalmazáshoz szükséges együttműködő biztonsági funkciókkal. Ez drámaian kibővíti az ember-robot együttműködés (HRC) lehetőségeit olyan területekre, amelyek korábban elérhetetlenek voltak a szoros ember-gép együttműködés számára, mint például a nehéz teherbírású összeszerelés vagy a logisztika.
A RaaS elmagyarázza: Hogyan csökkenthetik a vállalatok a robotok piacra lépésének korlátait?
A nagy teherbírású robotok piaca fenntartható növekedésre számíthat, amelyet a technológiai innováció és az új szektorokba való terjeszkedés hajt. A sikeres megvalósításhoz azonban olyan stratégiai döntéseket kell hozniuk a vállalatoknak, amelyek túlmutatnak a puszta technológiai értékelésen.
Piacméret és növekedési előrejelzések
A globális ipari robotika piaca egy jelentős és növekvő szektor. A piacméret-előrejelzések az elemzés hatókörétől és módszertanától függően változnak, de következetesen pozitív trendet mutatnak
- Egy elemzés a 2024-es 33,9 milliárd USD-ről 2030-ra 60,5 milliárd USD-re történő növekedést prognosztizál, ami 9,9%-os összetett éves növekedési ütemnek (CAGR) felel meg.
- Egy másik tanulmány 16,9 milliárd USD-ről (2024) 29,4 milliárd USD-re számít 2029-re (CAGR 11,7%).
- Egy harmadik előrejelzés szerint a növekedés 19,9 milliárd USD-ről (2024) 55,5 milliárd USD-re fog nyúlni 2032-re (CAGR 14,2%).
A „Nehéz teherbírású robotplatformok” konkrét piacát 2024-re 333,5 millió USD-re becsülték, 2030-ra pedig 446,0 millió USD-t prognosztizálnak (CAGR 5,0%). Az eltérés az összesített adatoktól azt mutatja, hogy a nehéz teherbírású robotok az érték-intenzív, de az átlagosnál kisebb szegmenst képviselnek a teljes piacon.
A Nemzetközi Robotikai Szövetség (IFR) szerint az ipari robotok globális üzemi állománya 2023-ban rekordmagasságot ért el, 4,28 millió darabot, ami 10%-os növekedést jelent az előző évhez képest. Bár 2024-ben átmeneti piaci visszaesés történt, a hosszú távú növekedési trend várhatóan 2025-től folytatódik. Ázsia, különösen Kína, továbbra is a legnagyobb és leggyorsabban növekvő piac, az új telepítések 70%-át teszi ki.
A növekedés fő mozgatórugói és akadályai
Növekedési mozgatórugók:
- Képzett munkaerő hiánya és demográfiai változások: Számos iparosodott országban a képzett munkaerő hiánya a fizikailag megterhelő és ismétlődő feladatok automatizálását hajtja.
- Ipar 4.0 és intelligens gyártás: A termelés hálózatba kapcsolása és digitalizálása intelligens és rugalmas robotokat igényel központi elemként.
- Új ágazatok fejlesztése: A növekedést egyre inkább az autóiparon kívüli iparágakba való bevezetés hajtja, mint például a logisztika, az építőipar és a megújuló energiaforrások.
- Fenntarthatóság és visszatelepítés: A robotok javítják az anyagfelhasználás hatékonyságát, csökkentik a hulladékot és költséghatékony termelést tesznek lehetővé a saját országban.
Akadályok:
- Magas kezdeti beruházások: A robot, annak integrációja és a szükséges perifériák költségei jelentős akadályt jelentenek, különösen a kis- és középvállalkozások (kkv-k) számára.
- Integráció összetettsége: A felhasználóbarátabb felületek ellenére a robotok meglévő, régi rendszerekbe való integrálása és az interoperabilitás biztosítása továbbra is kihívást jelenthet.
A végrehajtás stratégiai követelményei
A nagy teherbírású robotok használatát fontolgató vállalatok számára a következő stratégiai szempontok kulcsfontosságúak:
- A hangsúly a tőkekiadásokról (Capex) a teljes birtoklási költségre (TCO) és a megtérülésre (ROI): A befektetési döntéseket nem szabad kizárólag a vételáron alapulni. Elengedhetetlen a teljes birtoklási költség (TCO) – beleértve az energiafogyasztást, a karbantartást és a rendelkezésre állást –, valamint a megtérülés (ROI) – amelyet a nagyobb áteresztőképesség, a jobb minőség és a csökkentett munkaerőköltségek vezérelnek – holisztikus elemzése.
- Új üzleti modellek alkalmazása: Az olyan modellek, mint a robotika szolgáltatásként (RaaS), csökkentik a kezdeti befektetési korlátot azáltal, hogy lehetővé teszik a vállalatok számára, hogy robotikai képességeket béreljenek működési költségként, ahelyett, hogy tőkebefektetést eszközölnének.
- Befektetés a személyzet fejlesztésébe: A programozás egyszerűsítése nem szünteti meg a képzett alkalmazottak szükségességét. Inkább a szükséges készségeket a pusztán kódprogramozásról a magasabb szintű feladatokra, például a folyamatoptimalizálásra, a rendszerfelügyeletre és a karbantartásra helyezi át. A vállalatoknak be kell fektetniük munkaerőjük továbbképzésébe, hogy hatékonyan tudják kezelni és együttműködni ezekkel az intelligens gépekkel.
- Szoftverek és ökoszisztémák előtérbe helyezése: Robot kiválasztásakor a gyártó szoftverplatformjának, annak felhasználóbarát jellegének és partnerökoszisztémájának szélességének kell meghatározó kritériumnak lennie. Egy erős ökoszisztéma hozzáférést biztosít az előre integrált megoldásokhoz, és jövőbiztossá teszi a befektetést a változó követelményekkel szemben.
Itt vagyunk Önnek - Tanácsadás - Tervezés - Megvalósítás - Projektmenedzsment
☑️ KKV-támogatás a stratégiában, tanácsadásban, tervezésben és megvalósításban
☑️ Digitális stratégia létrehozása vagy átalakítása és digitalizáció
☑️ Nemzetközi értékesítési folyamatok bővítése és optimalizálása
☑️ Globális és digitális B2B kereskedési platformok
☑️ Úttörő üzletfejlesztés

Konrad Wolfenstein
Örömmel lennék az Ön személyes tanácsadója.
Kapcsolatba léphet velem az alábbi kapcsolatfelvételi űrlap kitöltésével, vagy egyszerűen hívjon a +49 7348 4088 965 .
Alig várom a közös projektünket.
Írj nekem



Xpert.Digital - Konrad Wolfenstein
Az Xpert.Digital egy iparági központ, amely a digitalizációra, a gépészetre, a logisztikára/intralogisztikára és a fotovoltaikus elemekre összpontosít.
360°-os üzletfejlesztési megoldásunkkal elismert vállalatokat támogatunk az új üzletektől az értékesítés utáni szolgáltatásokig.
Piackutatás, smarketing, marketingautomatizálás, tartalomfejlesztés, PR, levelezési kampányok, személyre szabott közösségi média és érdeklődőgondozás digitális eszközeink részét képezik.
További információkat a következő weboldalakon talál: www.xpert.digital - www.xpert.solar - www.xpert.plus
Tartsuk a kapcsolatot