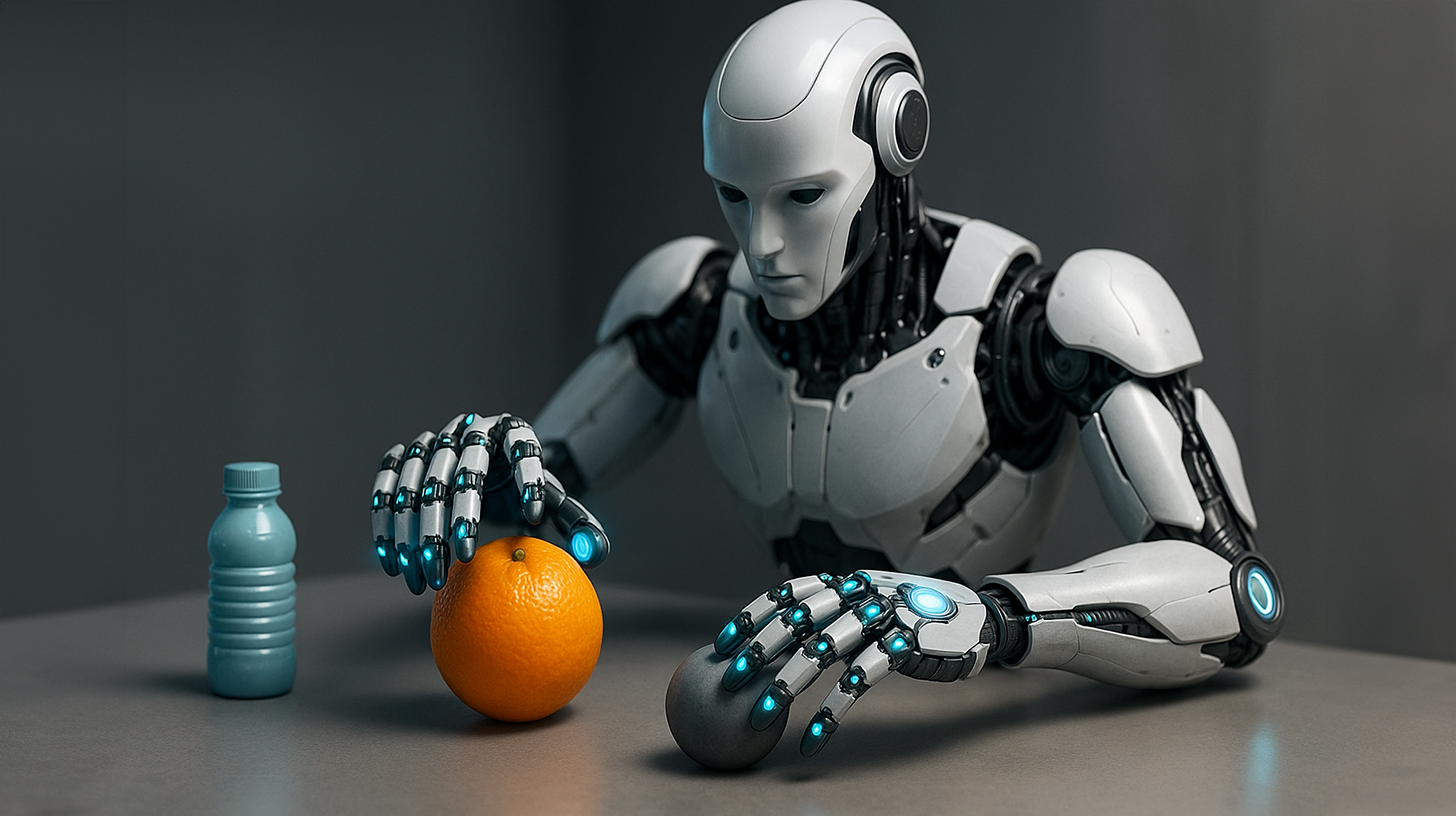
Robotique tactile : des robots dotés du sens du toucher : la nouvelle génération issue des recherches de Vulcan et du MIT sur la reconnaissance haptique des objets – Image : Xpert.Digital
Le système de reconnaissance d'objets du MIT sans capteurs spéciaux et le robot Vulcan d'Amazon
Perception haptique pour les machines : établir de nouvelles normes en matière de reconnaissance d’objets
Dans le domaine de la robotique, le développement des capteurs tactiles et des systèmes de reconnaissance constitue une avancée majeure, permettant pour la première fois aux machines non seulement de voir leur environnement, mais aussi de le « ressentir ». Le robot Vulcan d'Amazon et le système innovant de reconnaissance d'objets du MIT illustrent parfaitement cette évolution. Ces deux technologies élargissent considérablement le champ d'application des robots et rendent possibles des tâches qui, auparavant, ne pouvaient être accomplies que par l'être humain grâce à sa perception tactile naturelle.
En lien avec ceci :


Le robot Vulcan d'Amazon : une avancée majeure dans le domaine de la préhension robotique tactile
Fondements fonctionnels et technologiques
Le robot Vulcan, développé par Amazon, représente une avancée technologique majeure dans le domaine de l'intelligence artificielle physique. Amazon qualifie cette innovation de « percée en robotique et en IA physique ». Le système se compose de deux modules principaux : « Stocker » pour stocker les objets et « Prendre » pour les récupérer. Sa caractéristique remarquable est sa capacité à percevoir son environnement de manière tactile.
La technologie à la base des capacités tactiles de Vulcan repose sur des capteurs de force et de couple spéciaux, en forme de palet de hockey, qui permettent au robot de « ressentir » la force qu'il peut appliquer pour saisir un objet sans l'endommager. Adam Parness, directeur de l'IA robotique chez Amazon, souligne le caractère unique de cette approche : « Vulcan n'est pas notre premier robot capable de déplacer des objets. Mais grâce à son sens du toucher – sa capacité à comprendre quand et comment il entre en contact avec un objet – il ouvre de nouvelles perspectives pour l'optimisation des flux de travail et des installations. ».
Pour ranger les articles sur les étagères, Vulcan utilise un outil ressemblant à une règle fixée à un fer à lisser. Grâce à cette « règle », il déplace les articles pour faire de la place aux nouveaux. Les bras de préhension adaptent leur force de préhension à la taille et à la forme de l'article, tandis que des convoyeurs intégrés le déposent dans le conteneur. Pour récupérer les articles, Vulcan utilise une ventouse couplée à un système de caméra.
Domaines d'application et performances actuels
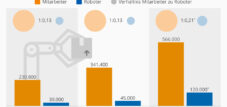
Le robot Vulcan est actuellement testé dans deux centres logistiques d'Amazon : à Winsen, près de Hambourg (Allemagne), et à Spokane, dans l'État de Washington (États-Unis). À Washington, six robots Vulcan de stockage sont opérationnels et ont déjà stocké avec succès un demi-million d'articles. À Winsen, deux robots Vulcan de préparation de commandes sont en service et ont déjà traité 50 000 commandes.
Les capacités du système sont remarquables : Vulcan peut actuellement traiter environ 75 % des millions de produits proposés par Amazon. Le plus petit objet que le robot peut manipuler a à peu près la taille d’un rouge à lèvres ou d’une clé USB. Sa capacité à identifier les objets en temps réel est particulièrement impressionnante, car « il lui serait impossible de connaître par cœur toutes les spécificités des articles », comme l’explique Parness.
Projets futurs et intégration dans la chaîne logistique
Amazon prévoit d'augmenter considérablement le nombre de robots Vulcan dans les années à venir. Cette année, leur nombre devrait passer à 60 à Winsen et à 50 à Washington. À long terme, l'objectif est de déployer ces robots dans des centres logistiques en Europe et aux États-Unis.
Un aspect essentiel de la stratégie d'Amazon réside dans la coexistence des humains et des machines. Le plan directeur de l'entreprise prévoit une collaboration étroite entre humains et machines. Les robots sont principalement destinés à manipuler les produits en rayon inaccessibles aux humains sans échelle ou nécessitant de se baisser excessivement. Cette approche devrait permettre d'accroître l'efficacité globale tout en réduisant la charge de travail des employés.
Système de détection d'objets du MIT par manipulation : une « détection » intelligente sans capteurs spéciaux
Approche innovante de la reconnaissance d'objets
Parallèlement à Vulcan d'Amazon, des chercheurs du MIT, d'Amazon Robotics et de l'Université de Colombie-Britannique ont développé un système qui adopte une approche différente pour doter les robots de capacités haptiques. Cette technologie permet aux robots de reconnaître les propriétés d'un objet, telles que son poids, sa souplesse ou son contenu, simplement en le saisissant et en le secouant légèrement, à l'instar des humains manipulant des objets inconnus.
La particularité de cette approche réside dans le fait qu'elle ne nécessite aucun capteur tactile spécifique. Le système utilise en effet les codeurs articulaires déjà présents sur la plupart des robots – des capteurs qui détectent la position et la vitesse de rotation des articulations lors des mouvements. Peter Yichen Chen, postdoctorant au MIT et principal auteur de l'article de recherche, explique la vision qui sous-tend le projet : « Mon rêve serait d'envoyer des robots explorer le monde afin qu'ils puissent toucher et déplacer des objets et découvrir de manière autonome les propriétés de tout ce avec quoi ils interagissent. ».
Modèles de fonctionnalités techniques et de simulation
Le système du MIT repose essentiellement sur deux modèles de simulation : l’un simule le robot et ses mouvements, l’autre reproduit la dynamique de l’objet. Chao Liu, également postdoctorant au MIT, souligne l’importance de ces jumeaux numériques : « Une réplique numérique précise du monde réel est essentielle au succès de notre méthode. ».
Le système utilise une technique appelée « simulation différentiable », qui permet à l'algorithme de prédire comment de petites variations des propriétés d'un objet, telles que sa masse ou sa souplesse, affecteront la position finale des articulations du robot. Une fois que la simulation correspond aux mouvements réels du robot, le système a identifié les propriétés exactes de l'objet.
L'un des principaux avantages de cette méthode réside dans son efficacité : l'algorithme effectue les calculs en quelques secondes et ne nécessite qu'une trajectoire réelle du robot pour fonctionner. Ce système s'avère ainsi particulièrement économique et pratique pour les applications concrètes.
Potentiel et avantages de l'application
La technologie développée pourrait s'avérer particulièrement utile dans des applications où les caméras sont moins efficaces, comme le tri d'objets dans un sous-sol sombre ou le déblaiement des débris dans un bâtiment partiellement effondré après un tremblement de terre.
Comme l'algorithme ne nécessite pas un vaste ensemble de données pour son apprentissage, contrairement à certaines méthodes qui s'appuient sur la vision par ordinateur ou des capteurs externes, il est moins sujet aux erreurs face à des environnements inconnus ou à de nouveaux objets. Cela confère au système une robustesse et une polyvalence exceptionnelles.
Le paysage de recherche plus large sur les capteurs tactiles en robotique
Défis fondamentaux et solutions actuelles
Le développement de robots dotés du sens du toucher pose des défis fondamentaux aux chercheurs. Le système tactile humain étant extrêmement complexe et nuancé, les systèmes artificiels doivent le reproduire par des moyens technologiques. Ken Goldberg, roboticien à l'Université de Californie à Berkeley, souligne la complexité de cette tâche : « Le sens du toucher humain est incroyablement nuancé et complexe, avec une vaste gamme dynamique. Bien que les robots progressent rapidement, je serais surpris de voir des capteurs tactiles aussi performants que ceux utilisés par l'humain dans les cinq à dix prochaines années. ».
Malgré ces difficultés, des progrès significatifs sont réalisés dans la recherche. Par exemple, l'institut Fraunhofer IFF développe des systèmes de capteurs tactiles permettant une préhension réactive, imitant la main humaine, et parfaitement adaptés à la manipulation d'objets fragiles ou flexibles. Les données des capteurs sont utilisées pour l'adaptation des pinces, la reconnaissance des composants et de leur position, ainsi que pour le suivi des processus.
Projets de recherche innovants dans le domaine de la robotique tactile
Outre les développements d'Amazon et du MIT, il existe d'autres projets de recherche importants dans le domaine des capteurs tactiles pour robots :
L'Institut Max Planck pour les systèmes intelligents a mis au point un capteur haptique baptisé Insight, capable de détecter le toucher avec une grande sensibilité. Georg Martius, responsable d'une équipe de recherche au sein de l'institut, souligne les performances exceptionnelles du capteur : « Notre capteur affiche des performances remarquables grâce à la conception mécanique innovante de son boîtier, au système d'imagerie interne conçu sur mesure, à l'acquisition automatique des données et aux méthodes d'apprentissage profond de pointe. » Le capteur est si sensible qu'il peut même percevoir sa propre orientation par rapport à la gravité.
Un autre projet intéressant est DensePhysNet, un système qui effectue activement une séquence d'interactions dynamiques (glissements, collisions, etc.) et utilise un modèle prédictif profond sur ses observations visuelles pour apprendre des représentations denses, pixel par pixel, reflétant les propriétés physiques des objets observés. Des expériences menées en simulation et en environnement réel montrent que les représentations apprises contiennent de riches informations physiques et peuvent être utilisées directement pour décoder des propriétés physiques d'objets telles que le frottement et la masse.
En lien avec ceci :

Perspectives d'avenir pour les systèmes robotiques tactiles
Intégration de systèmes de capteurs multimodaux
L'avenir de la robotique tactile repose sur l'intégration de différentes modalités sensorielles. Des chercheurs du MIT travaillent déjà à enseigner à l'intelligence artificielle comment combiner des sens tels que la vue et le toucher. En comprenant comment ces différentes modalités sensorielles interagissent, les robots pourront développer une compréhension plus globale de leur environnement.
L'équipe du MIT prévoit déjà de combiner sa méthode de détection d'objets avec la vision par ordinateur afin de créer un système de capteurs multimodaux encore plus performant. « Ce travail ne vise pas à remplacer la vision par ordinateur. Chaque méthode présente ses avantages et ses inconvénients. Mais nous avons démontré qu'il est déjà possible de détecter certaines de ces propriétés, même sans caméra », explique Chen.
Domaines d'application élargis et développements futurs
L'équipe de chercheurs du MIT souhaite également explorer des applications avec des systèmes robotiques plus complexes, tels que les robots souples, et des objets plus complexes, notamment des liquides en mouvement ou des milieux granulaires comme le sable. À long terme, ils espèrent utiliser cette technique pour améliorer l'apprentissage des robots, leur permettant ainsi de développer rapidement de nouvelles compétences de manipulation et de s'adapter aux changements de leur environnement.
Amazon prévoit de développer et de déployer la technologie Vulcan à plus grande échelle dans les années à venir. L'intégration de Vulcan à sa flotte actuelle de 750 000 robots mobiles suggère un concept d'automatisation global susceptible de transformer en profondeur le secteur de la logistique.
Apprentissage tactile : quand des capteurs donnent aux robots le sens du toucher
Le développement de robots dotés du sens du toucher, à l'instar de Vulcan d'Amazon et du système de reconnaissance d'objets du MIT, marque un tournant décisif en robotique. Ces technologies permettent aux robots d'accomplir des tâches auparavant réservées aux humains, car elles requièrent une motricité fine et une compréhension tactile.
Les différentes approches – l’utilisation par Amazon de capteurs spécialisés et le concept du MIT d’utiliser des capteurs existants pour l’inférence haptique – illustrent la diversité des axes de recherche dans ce domaine. Chaque approche présente ses propres atouts et domaines d’application.
L'intégration croissante des capacités tactiles dans les systèmes robotiques ouvre de nouvelles perspectives pour l'automatisation des tâches complexes dans la logistique, la production, la santé et bien d'autres domaines. La capacité des robots non seulement à voir, mais aussi à « ressentir » leur environnement nous rapproche considérablement d'un avenir où robots et humains pourront collaborer de manière encore plus étroite et intuitive.
En lien avec ceci :