

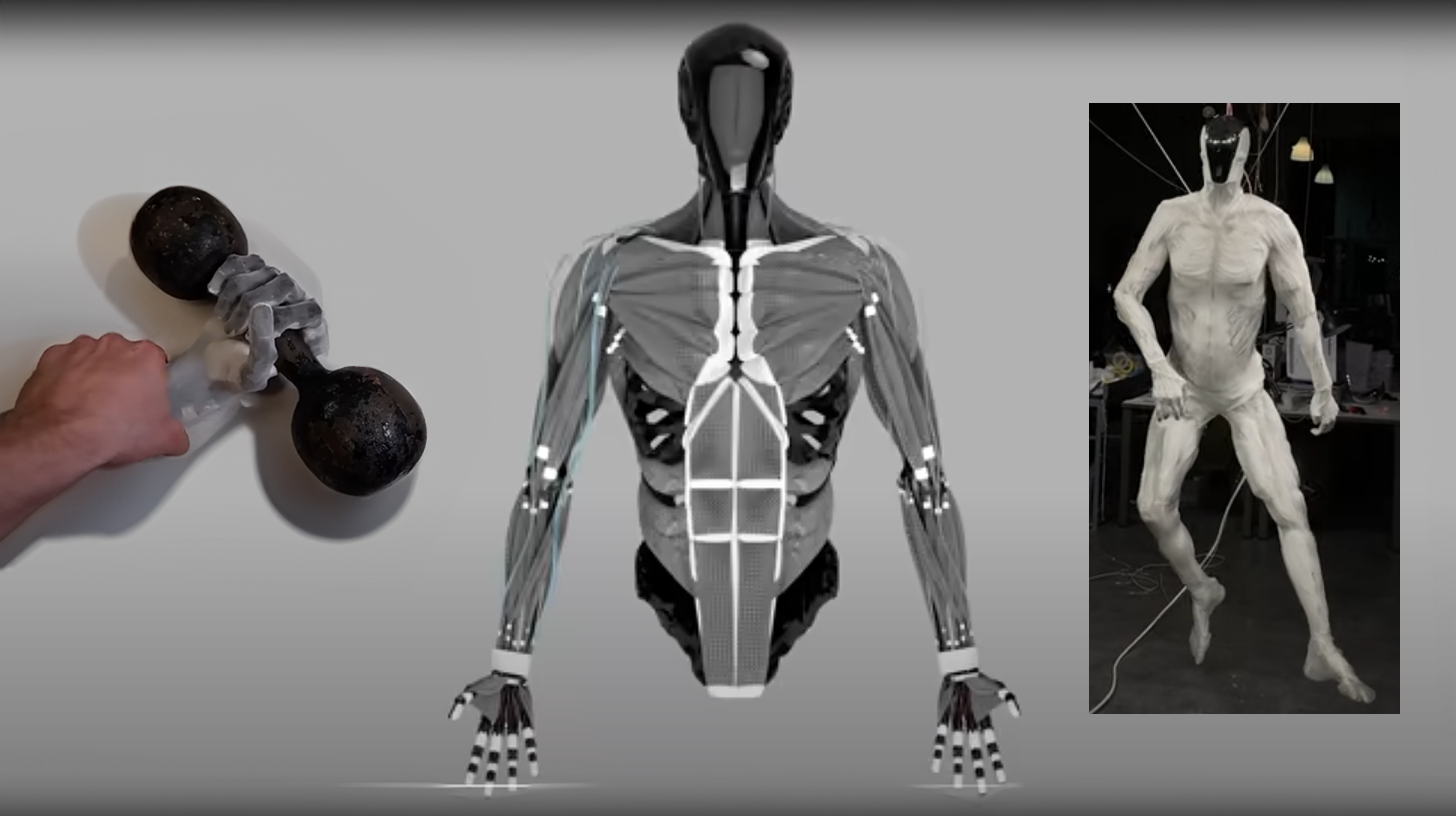
Le robot Protoclone V1 de Clone Robotics repousse les limites de la robotique humanoïde : plus humain que jamais. – Source de l’image : Clone Robotics / Création : Xpert.Digital
L'avenir des robots est biomimétique : Protoclone V1 établit de nouvelles normes
Protoclone V1 : une nouvelle référence en robotique humanoïde
Dans un monde en pleine mutation, où l'automatisation et l'intelligence artificielle prennent une ampleur considérable, Clone Robotics franchit une étape remarquable en robotique avec la présentation de son dernier projet : le Protoclone V1. Ce robot humanoïde représente non seulement une avancée technologique majeure, mais aussi une redéfinition fondamentale de notre conception de la robotique et de son intégration dans nos vies. Le Protoclone V1 est bien plus qu'une simple machine ; c'est un système biomimétique complexe, conçu pour reproduire l'anatomie et les mouvements humains avec un niveau de détail sans précédent.
La présentation du Protoclone V1 marque le début d'une nouvelle ère pour la robotique. Alors que les robots humanoïdes traditionnels reposent souvent sur des principes mécaniques rigides, Clone Robotics adopte une approche radicalement différente. Le Protoclone V1 est le fruit d'une compréhension approfondie de la biologie humaine et des mécanismes complexes qui sous-tendent nos mouvements et nos fonctions. Plutôt que de simplement reproduire la *forme* humaine, Clone Robotics vise à reproduire la *fonction* – une approche susceptible de redéfinir les limites du possible en robotique.
En lien avec ceci :
Le concept de biomimétisme (également appelé bionique ou biomimétique) en robotique
Le Protoclone V1 incarne le principe du biomimétisme en robotique. Le biomimétisme, dérivé des mots grecs « bios » (vie) et « mimesis » (imitation), est une approche de conception qui s'inspire de la nature pour trouver des solutions innovantes aux problèmes humains. En robotique, cela signifie s'inspirer des systèmes biologiques pour développer des robots plus efficaces, adaptables et intuitifs.
Le corps humain est un chef-d'œuvre de l'évolution, un système incroyablement complexe et efficace, optimisé au fil de millions d'années. Le comprendre et le reproduire représente un immense défi, mais aussi une voie pour créer des robots capables d'accomplir des tâches inaccessibles aux robots conventionnels. Le Protoclone V1 constitue une avancée audacieuse dans cette direction, en tentant de reproduire les subtilités de l'anatomie et de la physiologie humaines au sein d'une machine.
Principales caractéristiques du Protoclone V1 : un aperçu détaillé
Pour concrétiser sa vision biomimétique, le Protoclone V1 s'appuie sur un ensemble de technologies et de principes de conception innovants. Ceux-ci peuvent être regroupés en plusieurs domaines clés :
1. Système musculo-squelettique : la base du mouvement humain
Le cœur du Protoclone V1 réside dans son système musculo-squelettique, d'une complexité et d'un niveau de détail inégalés. Au lieu d'os métalliques conventionnels et d'articulations rigides, Clone Robotics utilise des os en polymère imprimés en 3D, modelés sur l'anatomie humaine. Ces os sont non seulement plus légers que le métal, mais offrent également une plus grande flexibilité et permettent des mouvements plus naturels.
L'utilisation de plus de 1 000 muscles myofibrillaires artificiels est encore plus révolutionnaire. Ces fibres synthétiques, qui se contractent sous la pression, imitent la fonction des muscles humains à l'échelle microscopique. Contrairement aux moteurs électriques classiques, souvent encombrants et peu performants, ces muscles artificiels offrent une densité de force élevée tout en permettant des mouvements fluides et précis. Leur nombre impressionnant – 1 000 dans le Protoclone V1 – témoigne de l'engagement de Clone Robotics à reproduire les capacités motrices humaines avec la plus grande fidélité possible.
Avec plus de 200 degrés de liberté, le Protoclone V1 surpasse largement la plupart des robots humanoïdes conventionnels. Les degrés de liberté correspondent au nombre de mouvements indépendants possibles d'un robot. Plus ce nombre est élevé, plus les mouvements du robot sont flexibles et polyvalents. À titre de comparaison, un bras robotique industriel classique possède environ 6 degrés de liberté, tandis que les robots humanoïdes les plus sophistiqués en possèdent souvent entre 30 et 60. Les 200 degrés de liberté du Protoclone V1 ouvrent des perspectives inédites pour des mouvements complexes et d'un réalisme saisissant.
2. Système d'entraînement : Hydraulique et pneumatique combinés
Pour alimenter les muscles artificiels, le Protoclone V1 utilise un système hybride hydraulique/pneumatique. Ce système emploie des tubes en treillis pressurisés pour alimenter les myofibrilles en fluide ou en air, contrôlant ainsi leur contraction. Une pompe de 500 watts fait office de « cœur artificiel », fournissant la haute pression nécessaire au fonctionnement de l'ensemble du système.
Le choix d'un système hydraulique et pneumatique est inhabituel en robotique, la plupart des robots modernes fonctionnant grâce à des moteurs électriques. Cependant, l'hydraulique et la pneumatique offrent des avantages considérables, notamment pour les applications biomimétiques. Les systèmes hydrauliques peuvent générer des forces extrêmement élevées tout en permettant des mouvements précis, tandis que les systèmes pneumatiques sont reconnus pour leur rapidité de réponse et leur flexibilité. L'association de ces deux systèmes dans le Protoclone V1 permet des mouvements à la fois puissants et délicats, similaires à ceux du système musculo-squelettique humain.
3. Capteurs et contrôle : optimisation en temps réel et « sudation »
Un système de capteurs avancé est essentiel pour permettre au Protoclone V1 de percevoir son propre corps et son environnement. Grâce à ses 500 capteurs répartis dans tout le robot, le Protoclone V1 peut mesurer et optimiser la force et la position en temps réel. Ces capteurs transmettent en continu des données au système de contrôle, qui ajuste ensuite l'activation des muscles artificiels pour exécuter le mouvement ou l'action souhaité(e). Ce système de rétroaction est comparable au système proprioceptif humain, qui nous permet de percevoir la position et les mouvements de notre corps dans l'espace sans regarder.
L'une des caractéristiques les plus innovantes du Protoclone V1 est son système de refroidissement intégré, qui imite la transpiration humaine. Les systèmes mécaniques complexes génèrent de la chaleur, surtout lors d'une utilisation intensive. Pour éviter la surchauffe, de nombreux robots sont équipés de ventilateurs ou de dissipateurs thermiques. Le Protoclone V1, quant à lui, va plus loin en utilisant un système qui fait circuler un fluide à travers des matériaux poreux à la surface du robot, où il s'évapore, créant ainsi un effet rafraîchissant – à l'instar de la transpiration humaine. Il s'agit non seulement d'une solution technique ingénieuse, mais aussi d'un nouvel exemple de l'approche biomimétique de Clone Robotics.
4. Apparence extérieure : Éviter la « vallée de l’étrange »
L'apparence extérieure du Protoclone V1 est volontairement minimaliste et fonctionnelle. Au lieu d'un visage détaillé et réaliste, le robot arbore un design sans visage, surmonté d'une visière noire. Ce choix esthétique est probablement une réponse au phénomène de la « vallée de l'étrange ». Ce terme désigne le sentiment de malaise, voire de dégoût, que peuvent éprouver les personnes face à des robots humanoïdes ou des animations informatiques d'apparence très humaine, mais présentant néanmoins de subtiles différences qui les rendent « anormaux » ou « inquiétants ». En renonçant à un visage réaliste, Clone Robotics cherche sans doute à atténuer cet effet et à favoriser l'acceptation du robot.
Le revêtement en caoutchouc qui dissimule les mécanismes internes du Protoclone V1 contribue à une apparence plus épurée et moins « mécanique ». Il protège non seulement les composants internes sensibles, mais confère également au robot une certaine dimension organique, en accord avec sa conception biomimétique.
Restrictions actuelles et développements futurs
Malgré ses capacités impressionnantes, le Protoclone V1 est encore en phase de développement préliminaire et présente certaines limitations. Cependant, ces défis sont inhérents aux technologies de pointe et offrent des perspectives d'améliorations et d'innovations futures.
1. Locomotion bipède : la voie vers la marche autonome
La locomotion bipède, ou marche sur deux jambes, représente l'un des plus grands défis de la robotique humanoïde. Le Protoclone V1 nécessite actuellement une assistance externe et ne peut marcher de manière autonome. Ceci est dû en partie à la complexité de la démarche humaine, qui exige une interaction précise entre équilibre, coordination et force. Bien que les actionneurs pneumatiques utilisés dans le Protoclone V1 offrent des avantages en termes de vitesse et de flexibilité, ils peuvent avoir des difficultés à effectuer les ajustements rapides nécessaires à une marche stable.
Clone Robotics est consciente de cette limitation et travaille activement à la surmonter. Les futures versions du Protoclone pourraient adopter des systèmes hydrauliques, offrant ainsi une meilleure réactivité et un contrôle plus précis. Les progrès réalisés dans les technologies de contrôle et les algorithmes de planification de la marche sont également essentiels pour permettre au Protoclone V1 de marcher de manière autonome.
2. Consommation d'énergie : l'efficacité comme clé de l'autonomie
La forte consommation énergétique du Protoclone V1 constitue un autre défi lié à la complexité de son système d'entraînement. Les systèmes hydrauliques et pneumatiques peuvent se révéler inefficaces, notamment à haute pression. Cette forte demande en énergie limite l'autonomie du robot et peut nécessiter une alimentation externe ou des batteries très puissantes pour une utilisation mobile.
La réduction de la consommation d'énergie est un objectif de développement clé pour Clone Robotics. Ceci pourrait être réalisé grâce à l'amélioration de l'efficacité des muscles artificiels, des composants hydrauliques et pneumatiques, ou encore par l'utilisation de sources d'énergie alternatives. Les progrès réalisés dans le domaine des batteries et de la gestion de l'énergie contribueront également à rendre le Protoclone V1 plus économe en énergie et plus autonome.
3. Équilibre en temps réel : Les subtilités de la stabilité
L'équilibre en temps réel est étroitement lié à la locomotion bipède. Pour se tenir debout et marcher de manière stable, un robot doit pouvoir ajuster constamment son équilibre et réagir aux perturbations extérieures. Comme mentionné précédemment, les actionneurs pneumatiques peuvent avoir des difficultés à effectuer les ajustements rapides nécessaires à l'équilibre dynamique. Les systèmes hydrauliques peuvent offrir des avantages à cet égard, car ils permettent un contrôle plus précis et plus puissant.
Le développement de systèmes de contrôle et d'algorithmes avancés pour la gestion de l'équilibre est crucial pour assurer des mouvements stables et sûrs au Protoclone V1. Cela nécessite une compréhension approfondie des mécanismes d'équilibre humains et la capacité de les transposer dans des systèmes robotiques.
Projets et visions futurs de Clone Robotics
Malgré les limitations actuelles, Clone Robotics nourrit des projets ambitieux pour le développement futur du Protoclone et son intégration dans divers domaines d'application.
La version alpha « Clone α » : un premier pas vers la commercialisation
Clone Robotics prévoit de lancer la version alpha du Protoclone, baptisée « Clone α », en 2025. Cette production limitée à 279 unités constitue une première étape vers la commercialisation et permettra de tester et de perfectionner le robot en conditions réelles. La version alpha devrait déjà présenter des améliorations en matière de locomotion bipède, d'efficacité énergétique et d'équilibre, même si elle ne répond pas encore à tous les objectifs à long terme de l'entreprise.
Intégration des systèmes de contrôle assistés par l'IA : l'intelligence au service du protoclone
Un élément clé du développement futur du Protoclone réside dans l'intégration de l'intelligence artificielle (IA). Les systèmes de contrôle basés sur l'IA permettront au robot d'effectuer de manière autonome des tâches plus complexes, de s'adapter à des environnements changeants et même d'acquérir de nouvelles compétences. Des domaines tels que l'apprentissage automatique, les réseaux neuronaux et l'apprentissage par renforcement pourraient être utilisés pour améliorer la planification des mouvements, la reconnaissance d'objets, la prise de décision et l'interaction du Protoclone avec son environnement.
Applications possibles : au-delà du laboratoire
Bien que le Protoclone V1 soit encore en développement, des domaines d'application potentiels émergent déjà où ses capacités uniques pourraient offrir une valeur ajoutée.
aide domestique
La forme humanoïde et la mobilité du Protoclone le rendent parfaitement adapté aux tâches ménagères. Il pourrait accomplir les corvées quotidiennes telles que la cuisine, le ménage, la lessive et le transport d'objets. L'intégration de l'IA lui permettrait de se déplacer dans des environnements domestiques complexes et imprévisibles et d'effectuer des tâches de manière autonome.
Soins et soutien
Dans une société vieillissante, les besoins en services de soins et d'assistance augmentent. Les robots humanoïdes comme le Protoclone pourraient jouer un rôle important auprès des personnes âgées ou vulnérables. Ils pourraient les aider dans leurs tâches quotidiennes, leur tenir compagnie et appeler les secours en cas d'urgence.
Industrie et production
Les robots humanoïdes trouvent également des applications dans l'industrie et la production. Le Protoclone pourrait prendre en charge des tâches d'assemblage complexes, travailler dans des environnements confinés ou dangereux et soulager les travailleurs humains des tâches physiquement exigeantes ou répétitives.
Recherche et développement
Le Protoclone est un outil précieux pour la recherche et le développement en robotique et dans les domaines connexes. Il permet aux scientifiques d'explorer les limites de la robotique biomimétique, de développer de nouvelles techniques de contrôle et d'approfondir leur compréhension du mouvement et de la cognition humains.
Clone Robotics : un pionnier de la robotique biomimétique
Clone Robotics se distingue des autres entreprises de robotique par son approche biomimétique constante. Alors que de nombreuses entreprises s'efforcent de rendre les robots plus efficaces, plus rapides ou plus puissants, Clone Robotics se concentre sur la création de robots plus humains, adaptables et intuitifs.
1. Conception biomimétique : la nature comme modèle
La conception du Protoclone V1 s'inspire entièrement de l'anatomie et de la physiologie humaines. L'utilisation d'os en polymère, de muscles artificiels, d'un système vasculaire hydraulique et même d'un mécanisme de transpiration témoigne de l'engagement profond de Clone Robotics envers le biomimétisme. Cette approche va au-delà de la simple imitation de la forme humaine ; elle vise à comprendre les principes et mécanismes fondamentaux des systèmes biologiques et à les transposer dans les systèmes robotiques.
2. Muscles artificiels : une révolution dans les actionneurs
L'utilisation de muscles artificiels à base de myofibrilles en remplacement des moteurs conventionnels représente une avancée révolutionnaire en robotique. Ces muscles artificiels offrent de nombreux avantages qui les rendent idéaux pour les applications biomimétiques. Leur temps de réaction rapide, leur haute efficacité, leur capacité à se mouvoir naturellement, leur polyvalence, leur conception légère et leur intégration dans un système global en font une technologie prometteuse pour l'avenir de la robotique.
3. Système hydraulique : Puissance et précision combinées
Le système vasculaire hydraulique du Protoclone, alimenté par une pompe de 500 watts, est un autre élément clé de sa conception biomimétique. Il permet une distribution efficace de l'énergie dans tout le robot et un contrôle précis des muscles artificiels. Les systèmes hydrauliques sont reconnus pour leur capacité à générer des forces importantes tout en permettant des mouvements précis, ce qui les rend idéaux pour reproduire les capacités motrices humaines.
4. Grande mobilité : Plus de 200 degrés de liberté pour des mouvements complexes
Les 200 degrés de liberté du Protoclone V1 témoignent de l'engagement de Clone Robotics à créer des robots d'une agilité inégalée. Ce grand nombre de degrés de liberté lui permet d'effectuer des mouvements complexes, semblables à ceux de l'humain, impossibles à réaliser avec des robots conventionnels. Ceci ouvre de nouvelles perspectives d'applications dans des domaines exigeant dextérité, flexibilité et adaptabilité.
5. Systèmes d'organes synthétiques : un aperçu de l'avenir
L'intégration de systèmes d'organes synthétiques imitant les processus métaboliques humains est un aspect particulièrement futuriste du Protoclone V1. Cela laisse supposer que Clone Robotics ambitionne à long terme de développer des robots qui non seulement ressemblent à des humains et se déplacent comme eux, mais fonctionnent aussi de manière, en quelque sorte, « naturelle ». On pourrait ainsi concevoir, à l'avenir, des robots capables de fonctionner de manière autonome pendant de longues périodes sans nécessiter d'alimentation externe ni de maintenance constante.
6. Technologie de capteurs avancée : proprioception pour les robots
Doté de 320 capteurs de pression et de deux caméras, le robot Protoclone de Clone Robotics crée une boucle de rétroaction proprioceptive similaire au système nerveux humain. Ce système sensoriel avancé lui permet de percevoir sa position et ses mouvements dans l'espace, de mesurer les forces en jeu et de réagir aux changements de son environnement. Cette capacité proprioceptive est essentielle au développement de robots capables de se déplacer de manière sûre et efficace dans des environnements complexes et imprévisibles.
Avantages des muscles artificiels myofibriques en détail
Les muscles artificiels myofibrillaires développés par Clone Robotics offrent de nombreux avantages par rapport aux moteurs conventionnels en robotique :
1. Temps de réponse rapide : dynamique et précision
La capacité de ces muscles artificiels à se contracter jusqu'à 30 % en 50 millisecondes est impressionnante, permettant un contrôle des mouvements très rapide et précis. Ce temps de réaction est comparable à celui des muscles humains et surpasse celui de nombreux moteurs électriques conventionnels. Ceci est particulièrement important pour les applications exigeant des mouvements dynamiques, des réactions rapides et des réglages fins.
2. Haute efficacité : puissance et légèreté
Le rapport de force de 3 grammes pour 1 kilogramme démontre la haute efficacité des muscles artificiels myofibrillaires. Ils peuvent générer une force considérable pour un poids relativement faible. Il s'agit d'un avantage crucial en robotique, où la réduction du poids est souvent un facteur clé d'agilité et d'efficacité énergétique. Des robots plus légers peuvent se déplacer plus vite, consomment moins d'énergie et sont plus faciles à manipuler.
3. Mouvements naturels : Souplesse et organicité
Leur conception biomimétique permet aux muscles artificiels de doter les robots de mouvements fluides et naturels, très proches de ceux du corps humain. Contrairement aux mouvements souvent saccadés et mécaniques des robots conventionnels, ces muscles artificiels génèrent des mouvements organiques et harmonieux, plus intuitifs et rassurants pour l'humain. Ceci est particulièrement important pour les robots humanoïdes destinés à interagir directement avec les personnes.
4. Polyvalence : Motricité fine et mouvements de l'ensemble du corps
Les muscles artificiels sont polyvalents et permettent aussi bien des mouvements fins des doigts que des postures dynamiques du corps entier. Cette polyvalence ouvre la voie à un large éventail d'applications, allant des tâches d'assemblage précises dans l'industrie aux interactions complexes à domicile ou en milieu de soins. La capacité à effectuer des mouvements fins et globaux constitue un atout crucial pour les robots humanoïdes destinés à évoluer dans des environnements divers et imprévisibles.
5. Construction légère : mobilité et efficacité énergétique
Comparativement aux moteurs conventionnels, les muscles artificiels contribuent à une réduction de poids significative. Ceci améliore l'efficacité et l'agilité globales du robot. Un poids réduit se traduit non seulement par une mobilité accrue, mais aussi par une consommation d'énergie moindre, puisqu'une masse réduite est à déplacer. Ceci est particulièrement important pour les robots mobiles alimentés par batterie.
6. Système intégré : Fonctionnalité holistique
Les muscles artificiels à myofibrilles font partie d'un système biomimétique complexe comprenant un réseau vasculaire hydraulique et des capteurs proprioceptifs. Cette intégration permet une fonctionnalité globale et d'apparence naturelle. Les différents composants agissent en synergie pour conférer au robot des capacités de mouvement et de perception similaires à celles de l'humain. Ce système intégré est supérieur à la somme de ses parties et permet au Protoclone de fonctionner d'une manière difficilement réalisable avec des robots de conception conventionnelle.
Applications et impact sociétal
La technologie du Protoclone V1 et la robotique biomimétique en général ont le potentiel de transformer de nombreux secteurs et aspects de la vie humaine. Outre les applications déjà mentionnées dans le domaine domestique, les soins et l'industrie, les robots humanoïdes comme le Protoclone pourraient également jouer un rôle important dans les domaines suivants à l'avenir :
Exploration et sauvetage
Dans des environnements dangereux ou inaccessibles, comme les zones sinistrées, les grands fonds marins ou l'espace, des robots humanoïdes pourraient être déployés pour des missions d'exploration, de recherche et de sauvetage. Leur apparence et leur mobilité, semblables à celles des humains, leur permettraient de se déplacer dans des environnements complexes et d'accomplir des tâches trop dangereuses, voire impossibles, pour l'être humain.
Divertissement et éducation
Les robots humanoïdes pourraient être utilisés dans l'industrie du divertissement, par exemple comme acteurs, animateurs ou personnages interactifs dans les parcs d'attractions. Dans le domaine de l'éducation, ils pourraient servir d'assistants d'apprentissage ou de tuteurs interactifs, transmettant des connaissances aux élèves de manière personnalisée et stimulante.
Un pas vers un nouvel avenir robotique
Le Protoclone V1 de Clone Robotics est bien plus qu'un simple robot humanoïde. Il représente une avancée majeure dans l'ère de la robotique, où biomimétisme et technologies de pointe convergent pour créer des machines capables non seulement d'accomplir des tâches, mais aussi de s'intégrer naturellement et intuitivement au monde humain. Bien que le Protoclone V1 soit encore en développement et confronté à des défis, il incarne une vision de la robotique susceptible de transformer radicalement nos vies. La question de savoir à quelle vitesse Clone Robotics parviendra à surmonter les limitations actuelles et à développer un robot bipède autonome et pleinement fonctionnel reste passionnante. Une chose est sûre : le Protoclone V1 a établi une nouvelle référence en robotique humanoïde et a considérablement accru les attentes quant aux possibilités futures.
En lien avec ceci :
Votre partenaire mondial en marketing et développement commercial
☑️ Notre langue de travail est l'anglais ou l'allemand
☑️ NOUVEAU : Correspondance dans votre langue maternelle !

Konrad Wolfenstein
Mon équipe et moi-même sommes heureux de pouvoir vous accompagner en tant que conseiller personnel.
Vous pouvez me contacter en remplissant le formulaire de contact ici wolfenstein@xpert.digital :ou simplement m'appeler au +49 7348 4088 965. Mon adresse e-mail est
J'attends avec impatience notre projet commun.