Raskeveokite robotite vaikne revolutsioon masinaehituses: miks tehisintellekt on nüüd otsustav tegur kõige võimsamate robotite valimisel – Creative image Xpert.Digital
Võimsam kui kunagi varem – ja nüüd ka nutikas: seda uued superrobotid tõeliselt teha suudavad
### Unustage tehasepõrand: need robotihiiglased vallutavad nüüd ehitusplatse ja tuuleparke ### Puure pole enam vaja: kuidas mitmetonnised robotid saavad inimestele ohututeks meeskonnakaaslasteks ### Lahendus oskustööliste puudusele? Need robotid võtavad üle maailma raskeimad tööd ### Titaanide kokkupõrge: mitte jõud, vaid tarkvara otsustab, kes ehitab parima roboti ###
Tugevuse evolutsioon: uusimad arengud suure jõudlusega raskeveokite robotites
Raskeveokite robotite sektor läbib põhjalikku muutust, mis ulatub kaugemale pelgalt kandevõime ja ulatuse suurendamisest. Viimased arengud näitavad paradigma muutust tervikliku lähenemisviisi suunas, mis seab esikohale intelligentsuse, kohanemisvõime, kasutajasõbralikkuse ja uute rakenduste väljatöötamise. Tarkvara, tehisintellekt (AI) ja täiustatud mehhatroonika on muutunud peamisteks väärtuste liikumapanijateks, võimaldades neil võimsatel masinatel lahendada keerulisi ülesandeid dünaamilistes keskkondades, sageli otseses koostöös inimestega. Peamised trendid hõlmavad traditsiooniliste tööstusrobotite ja koostööl põhinevate süsteemide (kobotite) vaheliste piiride üha suurenevat hägustumist, laienemist sellistesse sektoritesse nagu ehitus ja taastuvenergia ning omamise kogukulude (TCO) ja jätkusuutlikkuse kasvavat tähtsust. Need arengud määratlevad järgmise põlvkonna raskeveokite roboteid, mis on mitte ainult tugevamad, vaid mis veelgi olulisem, targemad, paindlikumad ja kättesaadavamad.
Uue põlvkonna raskeveokite robotid: võimsuse ja täpsuse uus definitsioon
Raskeveokite robotite turg areneb puhtast maksimaalse kandevõime nimel peetavast konkurentsist mitmekesiseks maastikuks, kus kesksel kohal on rakendusspetsiifiline jõudlus ja tõhusus. Juhtivad tootjad eristavad oma tooteid võimsuse, kiiruse, kompaktsuse ja intelligentse disaini kombinatsiooniga.
Moodsa raskeveokite klassi definitsioon: enamat kui lihtsalt toores jõud
Raskeveokite robotid on loodud käsitlema koormaid, mis tavaliselt algavad 250 kg-st ja/või vajavad üle 4 meetri ulatust. Need moodustavad selliste tööstusharude nagu autotööstus, masinaehitus, valukojad ja üha enam ka ehitus selgroo, kus nad liigutavad massiivseid komponente, nagu mootoriplokid, terastalad ja terved sõidukikered. Kandevõime vahemik on tohutu, ulatudes mitmesajast kilogrammist praeguse tipptasemeni 2300 kg.
Tänapäevaste raskeveokite robotite hindamine on aga arenenud. Kuigi maksimaalne kandevõime jääb peamiseks kriteeriumiks, on üha enam tähelepanu keskpunktis terviklikud efektiivsusnäitajad. Nende hulka kuuluvad kandevõime ja kaalu suhe, vajalik jalajälg, energiatarbimine ning võime täpselt ja dünaamiliselt käsitseda suure inertsimomendiga koormaid. Need kriteeriumid peegeldavad sügavamat arusaama omamise kogukuludest ja tänapäevaste, paindlike tootmiskeskkondade nõuetest.
Konkurentsimaastik ja lipulaevamudelid (2024–2026)
Turgu domineerivad sellised tuntud tegijad nagu KUKA, Fanuc, ABB ja Yaskawa, samas kui uued konkurendid, näiteks Hiinast pärit Estun, on üha olulisemad. Nende ettevõtete strateegiad näitavad märkimisväärset erinevust, mis ulatub kaugemale pelgalt kandevõime maksimeerimisest.
Fanuc on oma M-2000iA seeriaga endiselt vaieldamatu turuliider üliraskete masinate segmendis. M-2000iA/2300 mudel, mille kandevõime on 2,3 tonni, on maailma võimsaim 6-teljeline liigendrobot ja sobib ideaalselt ülesannete jaoks, mis nõuavad absoluutselt maksimaalset tugevust, näiteks tervete sõidukišassiide tõstmiseks.
KUKA järgib optimeeritud jõudluse strateegiat. Kuigi KR FORTEC ultra seeria pakub kuni 800 kg tõstevõimet, iseloomustab seda erakordselt hea kandevõime ja kaalu suhe ning kompaktne disain. See saavutatakse uuenduslike disainifunktsioonide abil, nagu näiteks kaheharuline süsteem, mis suurendab jäikust ilma liigselt kaalu suurendamata. Kaubaaluste rakenduste jaoks pakub KR 1000 titan seeria mudeleid tõstevõimega kuni 1300 kg.
ABB positsioneerib oma lipulaeva IRB 8700 kui oma klassi kiireimat robotit. Kuni 800 kg (või kallutatud randmega 1000 kg) kandevõimega saavutab see väidetavalt 25% kiirema tsükliaja kui võrreldavad mudelid. ABB rõhutab ka oma töökindlust lihtsustatud mehaanilise konstruktsiooni kaudu, kus iga telje kohta on ainult üks mootor ja käigukast, mis vähendab hooldust ja alandab kogukulusid.
Yaskawa pakub laia tooteportfelli, mis sisaldab Motoman MH600, mille kandevõime on 600 kg. Selle paralleelliigendiga disain tagab suure stabiilsuse ja jäikuse, mis on eriti kasulik suure inertsimomendiga toorikute käsitsemisel. GP-seeria on loodud kiireks kasutamiseks.
Turule sisenevad ka uued konkurendid nagu Estun ja Kawasaki. Hiina suurim tööstusrobotite tootja Estun plaanib Euroopas turule tuua mudeleid nagu ER 13300, mille kandevõime on 1000 kg. Kawasaki laiendab oma tooteportfelli MXP710L (710 kg) ja M-seeriaga, mis suudavad käsitseda kuni 1500 kg.
Need erinevad lähenemisviisid näitavad, et raskeveokite robotite turg on arenenud ühemõõtmelisest võidujooksust suurima kandevõime nimel diferentseerituma konkurentsimaastiku poole. Tootjad konkureerivad nüüd spetsiifiliste jõudlusomaduste alusel, mis on kohandatud konkreetsete klientide nõuetele – olgu selleks maksimaalne jõud, efektiivsus piiratud ruumides või maksimaalne kiirus. See võimaldab kasutajatel valida lahenduse, mis on optimeeritud nende individuaalsetele tootmistingimustele, selle asemel, et lihtsalt valida kõige võimsam saadaolev mudel.
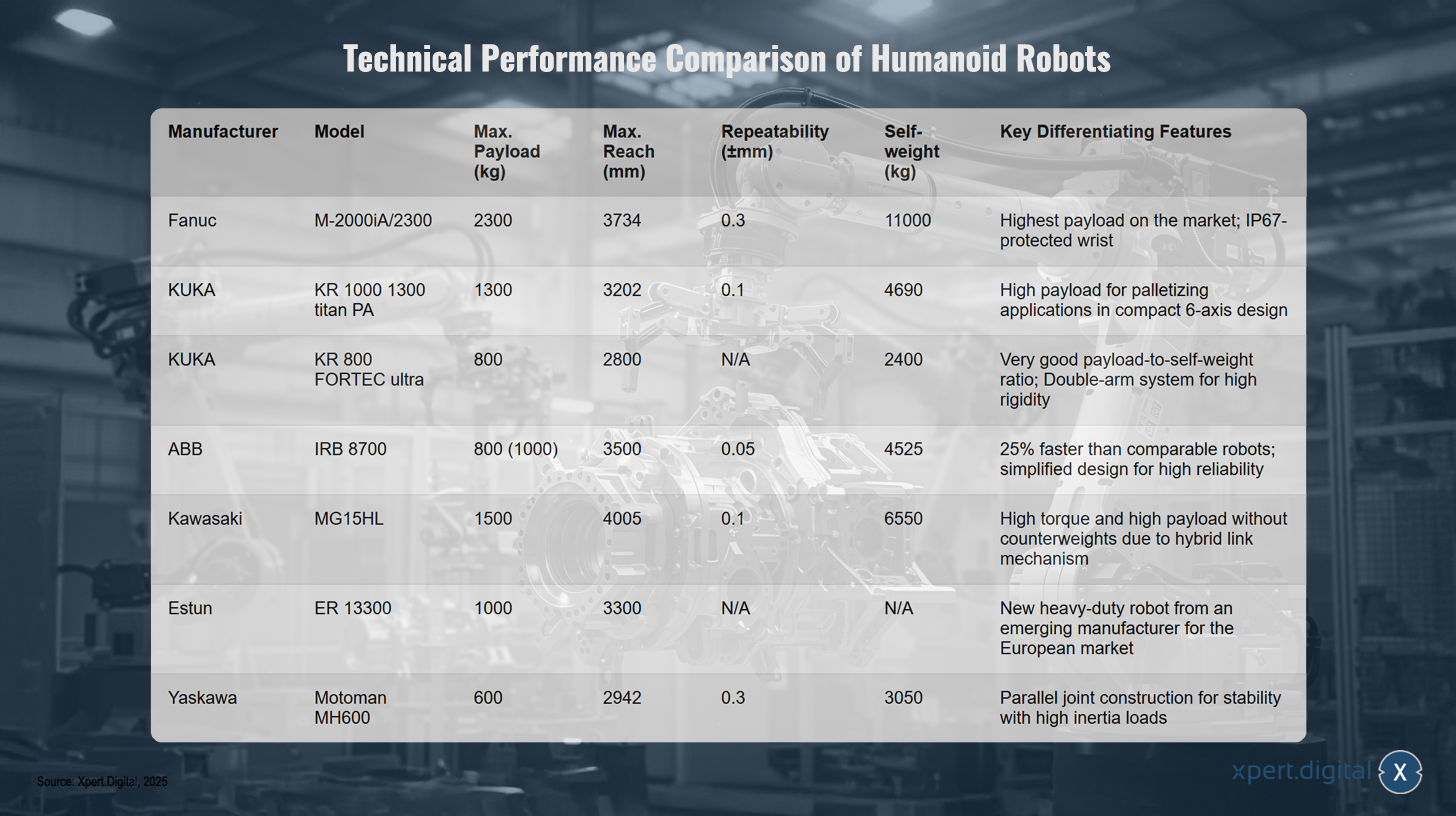
Robotihiiglased: võimsaimate tööstusrobotite võrdlus
Robotihiiglased: võimsaimate tööstusrobotite võrdlus – Pilt: Xpert.Digital
Tööstusrobotite maailmas on muljetavaldavaid hiiglasi, kes paistavad silma oma tohutu kandevõime ja tehniliste näitajate poolest. Tootjad nagu Fanuc, KUKA, ABB, Kawasaki, Estun ja Yaskawa võistlevad selle turusegmendi tipppositsiooni pärast.
Fanuc M-2000iA/2300 paistab silma oma erakordse kandevõimega 2300 kg ja sellel on ka IP67-kaitsega randme. KUKA esitleb robotit KR 1000 1300 titan PA, mille kandevõime on 1300 kg, mis sobib ideaalselt kaubaaluste laadimiseks ja millel on kompaktne 6-teljeline disain. ABB IRB 8700 on sarnaste mudelitega võrreldes 25% kiirem ja lihtsustatud disainiga maksimaalse töökindluse tagamiseks.
Kawasaki MG15HL kasutab hübriidhoovastikku, mis võimaldab suurt pöördemomenti ja kandevõimet ilma täiendavate vastukaaludeta. Yaskawa Motoman MH600 avaldab muljet oma paralleelhoovastiku disainiga, mis tagab stabiilsuse suurte inertsimomentidega koormuste korral.
Huvitav uustulnuk on Estun ER 13300, Euroopa turgu vallutada pürgiv raskeveokite robot. Need robotid demonstreerivad muljetavaldavalt tööstusautomaatika tehnoloogilisi edusamme ja juhtivate tootjate pidevat innovatsiooni.
Intellektimootor: tehisintellekt ja tarkvara kui peamised eristavad omadused
Raskeveokite robotite kõige olulisemad edusammud ei ole enam puhtalt mehaanilised. Pigem on tegemist robootika, tehisintellekti ja täiustatud tarkvara ühendamisega, mis laiendab põhjalikult nende masinate võimekust ja muudab nende toimimist revolutsiooniliselt.
Automatiseerimisest autonoomiani: tehisintellekti ja masinõppe mõju
Tehisintellekt ja masinõpe muudavad tööstusrobotid jäikadest, eelprogrammeeritud tööriistadest adaptiivseteks ja intelligentseteks süsteemideks, mis on võimelised tajuma, otsuseid langetama ja õppima. See muutus on ülioluline tänapäevaste tootmis- ja logistikaprotsesside varieeruvuse ja keerukuse haldamiseks.
Täiustatud taju ("silmad")
Tänapäeva robotid ei tööta enam pimesi. Nad on varustatud keerukate andurisüsteemidega, sealhulgas 2D- ja 3D-nägemissüsteemide, LiDAR-i ja stereokaameratega, mis annavad neile tervikliku ülevaate oma keskkonnast. Seda tajumisvõimet juhivad süvaõppe algoritmid objektide tuvastamiseks, lokaliseerimiseks ja segmenteerimiseks, muutes nende kasutamise struktureerimata keskkondades üldse võimalikuks.
Kasutusjuhtum – konteinerite komplekteerimine: süsteemid nagu KUKA.SmartBinPicking kasutavad täiustatud pilditöötlust konteineris juhuslikult paigutatud objektide tuvastamiseks, nende haardepunktide määramiseks ja ohutuks eemaldamiseks – ülesanne, mis on traditsioonilise reeglipõhise programmeerimisega praktiliselt võimatu.
Kasutusjuhtum – ehitusplatsi tuvastamine: Uuringud arendavad aktiivselt YOLO-põhiseid (You Only Look Once ehk vaatad ainult üks kord) objektide tuvastamise mudeleid. Need võimaldavad robotitel tuvastada töötajaid, sõidukeid ja hoonekonstruktsioone dünaamilistel ehitusplatsidel, mis on sellistes keerulistes keskkondades autonoomse töö põhinõue.
Intelligentne ülesannete käsitlemine („aju“)
Tehisintellekt ei ole mõeldud ainult nägemiseks, vaid ka tegutsemiseks. Konkreetse masinõppe mudelid võimaldavad robotitel oma tegevust reaalajas muutuvate tingimustega kohandada.
Kasutusjuhtum – tehisintellektil põhinev kaubaaluste mahalaadimine: FANUC kasutab tehisintellektiga juhitavaid nägemissüsteeme, et võimaldada robotitel autonoomselt maha laadida erineva suuruse ja asukohaga kastide segakaubaaluseid. Sellised süsteemid suudavad töödelda üle üheksa kasti minutis, asendades seeläbi äärmiselt pingutavat käsitsitööd.
Kasutusjuhtum – tehisintellektiga abistatav keevitamine: Järgmise põlvkonna süsteemid, näiteks NovAI™, kasutavad masinnägemist ja tehisintellekti adaptiivseks reaalajas keevitamiseks. Need suudavad jälgida keevisõmblusi, kohanduda pilude mõõtmete ja traatkeevistega ning dünaamiliselt korrigeerida keevitusparameetreid. See automatiseerib protsesse, mida varem peeti komponentide tolerantside tõttu robootika jaoks liiga ebajärjekindlaks, ning kujutab endast olulist edasiminekut raskete ehitustööde jaoks sellistes tööstusharudes nagu laevaehitus.
Kasutajasõbralikkuse revolutsioon: keerukuse lihtsustamine täiustatud tarkvara abil
Traditsiooniliselt oli tööstusrobotite programmeerimine väga spetsiifiline ülesanne, mis nõudis põhjalikke teadmisi patenteeritud programmeerimiskeeltest, näiteks KRL (KUKA) või RAPID (ABB). See kujutas endast suurt sisenemisbarjääri ja aeglustas automatiseerimislahenduste rakendamist.
Järgmise põlvkonna operatsioonisüsteemid
Juhtivad tootjad reageerivad sellele kitsaskohale, arendades välja uusi intuitiivseid operatsioonisüsteeme, mis on loodud robotite töö demokratiseerimiseks.
KUKA iiQKA.OS: Kaasaegne Linuxi-põhine operatsioonisüsteem veebipõhise kasutajaliidesega (iiQKA.UI), mis on loodud sama lihtsaks kasutamiseks kui nutitelefon. See toetab käskudepõhist programmeerimist, võimaldab virtuaalset kasutuselevõttu ja on loodud edendama tervet kolmandate osapoolte rakenduste ja riistvara ökosüsteemi („Robotic Republic“).
FANUC iHMI: „Intelligentne inimene-masin liides” on graafiline puutetundlikul ekraanil põhinev kasutajaliides, mis on loodud seadistamise ja koolituse aja drastiliseks vähendamiseks. See integreerib planeerimis-, redigeerimis- ja täiustustööriistad, näiteks tsükliaja hindamise ja hoolduse haldamise, ühte kasutajasõbralikku liidesesse.
Programmeerimise demokratiseerimine
Trend liigub selgelt koodivaba või vähese koodiga interaktsiooni poole. Standardiks on saamas visuaalsed programmeerimiskeskkonnad lohistamise funktsiooni ja graafiliste töövoo redaktoritega. Programmeerimisbarjääri langetavad veelgi „demonstreerimise teel õpetamise” meetodid, kus operaator juhib robotkätt käsitsi liikumise kaudu (käsitsi juhendamine) või kasutab robotile ülesande „demonstreerimiseks” väliseid tööriistu, näiteks Wandelbots Tracepeni.
Simulatsiooni jõud (digitaalsed kaksikud)
Võrguühenduseta programmeerimis- ja simulatsioonitarkvara, näiteks KUKA.Sim või ABB RobotStudio, on muutunud asendamatuks tööriistaks. See võimaldab ettevõtetel virtuaalselt kavandada, testida ja optimeerida terviklikke robotirakke enne füüsilise riistvara tellimist. See "virtuaalne kasutuselevõtt" vähendab oluliselt tegelikku seadistamisaega, minimeerib riske kokkupõrgete või ligipääsetavuse probleemide varajase avastamise kaudu ning võimaldab programmeerimist teostada paralleelselt riistvara hankimisega.
Need arengud viitavad robootika põhimõttelisele muutusele. Tootjad ei müü enam lihtsalt kontrolleriga robotkätt, vaid ehitavad terveid digitaalseid platvorme. Nende platvormide hulka kuuluvad operatsioonisüsteemid, rakenduste poed, partnervõrgustikud ja pilveühenduvus. KUKA reklaamib aktiivselt iiQKA jaoks partnerökosüsteemi ("Robotic Republic"), millel on avatud liidesed kolmandate osapoolte pakkujatele. Samal ajal võimaldavad platvormid, nagu Bosch Rexrothi ctrlX AUTOMATION, juhtida erinevate kaubamärkide (ABB, KUKA, FANUC) roboteid ühtse liidese kaudu. See areng peegeldab nutitelefonide turu muutumist, kus seadme väärtuse määrab suuresti selle rakenduste ökosüsteem. Seega nihkub konkurentsimaastik puhtalt riistvaraspetsifikatsioonidelt tarkvaraökosüsteemi tugevusele ja avatusele. Kasutajate jaoks tähendab see väiksemat sõltuvust ühest tootjast, kiiremat innovatsiooni ja juurdepääsu laiemale valikule spetsialiseeritud lahendustele. Robotist saab riistvaraplatvorm, millele ehitatakse tarkvarapõhine automatiseerimislahendus.
🎯🎯🎯 Saa kasu Xpert.Digitali ulatuslikust, viiest valdkonna asjatundlikkusest ühes terviklikus teenusepaketis | BD, R&D, XR, PR ja digitaalse nähtavuse optimeerimine


Saage kasu Xpert.Digitali ulatuslikust, viiest astmest koosnevast asjatundlikkusest terviklikus teenustepaketis | Teadus- ja arendustegevus, XR, PR ja digitaalse nähtavuse optimeerimine - Pilt: Xpert.Digital
Xpert.Digitalil on põhjalikud teadmised erinevates tööstusharudes. See võimaldab meil välja töötada kohandatud strateegiaid, mis on täpselt kooskõlas teie konkreetse turusegmendi nõuete ja väljakutsetega. Turusuundumuste pideva analüüsimise ja valdkonna arengute jälgimise abil saame tegutseda ennetavalt ja pakkuda uuenduslikke lahendusi. Kogemuste ja oskusteabe kombinatsioon loob lisaväärtust ja annab meie klientidele otsustava konkurentsieelise.
Lisateavet leiate siit:
Uus mehatroonika: kuidas raskeveokite robotid füüsilisi piire ületavad
Täiustatud mehatroonika: Võimu füüsiline evolutsioon
Lisaks tarkvara ja tehisintellekti kiirele arengule areneb ka raskeveokite robotite füüsiline vorm. Disaini, materjaliteaduse ja efektortehnoloogia innovatsioonid on selle suurenenud intelligentsuse mehaaniliseks jõudluseks muutmisel üliolulised.
Disaini ja materjalide uuendused: suurem jõudlus väiksema massiga
Põhitrend on kergemate ja kompaktsemate robotite arendamine, pakkudes samal ajal sama või isegi suuremat kandevõimet. Näiteks KUKA KR Fortec on oma eelkäijast kuni 700 kg kergem, samas kui KR FORTEC ultra seeria uhkeldab oma klassi parima kandevõime ja kaalu suhtega. See kaalulangus vähendab vundamendi nõudeid, vähendab energiatarbimist ning võimaldab kasutuselevõttu tihedalt asustatud ja ruumiliselt piiratud tootmisüksustes.
See on võimalik tänu täiustatud kinemaatilistele kontseptsioonidele. KUKA kaheharuline süsteem ja Fanuci ülijäigad harude konstruktsioonid parandavad täpsust ja vähendavad vibratsiooni suurtel kiirustel ja raskete koormuste korral. Kawasaki hübriidmehhanism välistab vajaduse mahukate vastukaalude järele, suurendades seeläbi roboti tööruumi.
Teine oluline aspekt on modulaarsus. KUKA robotite seeriad (KR Quantec, Fortec, Fortec ultra) jagavad üha enam ühiseid komponente, näiteks keskseid käepidemeid. See lihtsustab hooldust ja vähendab varuosade laokulusid klientidele, kes haldavad mitmekesist robotiparki.
Äärmuslikes keskkondades kasutamiseks on nüüd standardvarustuses spetsiaalsed variandid, näiteks „Foundry“ või „Hygienic“. Nendel mudelitel on IP67-kaitsega randmed ja korpused, kuuma- ja korrosioonikindlad katted ning toiduainetetööstusele sobivad määrdeained, mis võimaldavad nende kasutamist valukodades, sepikodades või toiduainete töötlemise tehastes.
Järgmise põlvkonna efektormehhanismid: roboti käed
Roboti käe otsas olevad haaratsid, mida tuntakse ka efektormehhanismidena, arenevad lihtsatest pneumaatilistest klambritest keerukateks mehatroonilisteks süsteemideks. Need on üha enam varustatud täiustatud anduritega, mis pakuvad adaptiivset funktsionaalsust. Kuigi neid leidub endiselt peamiselt väiksema kandevõimega rakendustes, mõjutavad haaratsite tehnoloogiat pehme robootika ja bioonika põhimõtted. Eesmärk on käsitleda suuremat valikut objektikujusid ja -materjale suurema töökindluse ja väiksema jõuga. Raskete ja keerukate objektide jaoks töötatakse välja mitmeteljelisi, täielikult juhitavaid mehhanisme, mis võimaldavad täpset manipuleerimist.
Randmele kinnitatud jõu-pöördemomendi andurid annavad robotile "puudutustunde". Need võimaldavad tal täita õrnu ülesandeid, näiteks komponentide täpne ühendamine, lihvimise ajal kindlaksmääratud jõu rakendamine või ootamatutele kokkupõrgetele ohutu reageerimine.
Andurite ökosüsteem: taju ja ohutuse alus
Kaasaegsed raskeveokite robotid tuginevad rikkalikule sisemiste ja väliste andurite ökosüsteemile. Sisemised andurid, näiteks mootori kodeerijad ja pöördemomendi andurid liigendites, on täpse liikumise juhtimise jaoks hädavajalikud. Välised andurid, näiteks 3D-kaamerad, LiDAR ja ultraheliandurid, annavad andmeid keskkonna tajumiseks ja võimaldavad inimese ja roboti ohutut koostööd. Integreeritud kokkupõrke- ja ülekoormuskaitsesüsteemid võivad kokkupõrke või liigse koormuse korral käivitada avariiseiskamise, kaitstes seega nii robotit kui ka töödeldavat detaili. Need süsteemid muutuvad üha keerukamaks ja pakuvad nüüd selliseid funktsioone nagu pneumaatiliselt reguleeritavad käivitusläved.
Jätkusuutlikkus ja tõhusus: keskendumine omamise kogukuludele (TCO)
Energiatõhususest on saanud peamine disainieesmärk. Kerge konstruktsiooni, tarkvara abil optimeeritud liikumisteede ja energiasäästlike ooterežiimide abil vähendavad tootjad oma robotite energiatarbimist. See mitte ainult ei vähenda tegevuskulusid, vaid parandab ka automatiseerimislahenduse keskkonnajalajälge. Lihtsustatud mehaanilised konstruktsioonid, näiteks ABB omad, kus iga telg kasutab ainult ühte mootorit, ja moodulkonstruktsioon toovad kaasa suurema töökindluse (keskmine riketevaheline aeg, MTBF) ja lühema remondiaja (keskmine remondiaeg, MTTR), vähendades veelgi üldiseid tegevuskulusid.
Mehhatroonika edusammud on tihedalt seotud tarkvara ja tehisintellekti arenguga. Jäigem ja vähem vibratsioonile kalduv käepideme struktuur (riistvara täiustamine) on eelduseks täiustatud liikumisjuhtimistarkvarale (tarkvara täiustamine), mis võimaldab robotil kiiremini ja täpsemalt liikuda. Tehisintellektil põhinevad teekonna planeerimise algoritmid saavad seejärel arvutada just selle kinemaatika jaoks kõige energiatõhusama trajektoori. Integreeritud jõu-pöördemomendi andurid annavad omakorda reaalajas tagasisidet, võimaldades juhtimistarkvaral reageerida ettenägematutele jõududele ja muuta protsessi töökindlamaks. Seega on tänapäevase raskeveokite roboti jõudlus kogu süsteemi tekkiv omadus, milles mehaanika, andurid ja tarkvara on lahutamatult seotud.
Laiendatud silmapiirid: uued rakendusvaldkonnad raskeveokite robootikale
Tehnoloogia areng tehisintellekti, tarkvara ja mehhatroonika vallas võimaldab kasutada raskeveokite roboteid tööstusharudes, mis varem tuginesid käsitsitööle või jäigale automatiseerimisele. Robotid lahkuvad kontrollitud tehasepõrandalt ja vallutavad dünaamilisi ja struktureerimata keskkondi.
Automatiseeritud ehitusplats
Ehitustööstus seisab silmitsi tohutute väljakutsetega oskustööliste puuduse, kõrgete ohutusriskide ja kasvava tootlikkuse surve tõttu. Seetõttu plaanib 81% ehitusettevõtetest järgmise kümne aasta jooksul robotid kasutusele võtta.
Rakendused: Tugevad robotid käitlevad massiivseid komponente, nagu terasprofiilid, monteeritavad betoonelemendid ja moodulkorpused. Neid kasutatakse automatiseeritud tootmiseks, näiteks suurte komponentide puurimiseks, neetimiseks ja kinnitamiseks. Konkreetne näide on Fischer BauBot, mis töötati välja spetsiaalselt puurimis- ja ankurdamistöödeks suurtel ehitusplatsidel. Roboteid saab varustada ka lõikeriistadega, et töödelda betoon- ja teraskomponente kohapeal suure täpsusega.
Peamised tehnoloogiad: Edu selles struktureerimata keskkonnas sõltub kriitiliselt tehisintellektil põhinevast objektide tuvastamisest materjalide ja takistuste tuvastamiseks, samuti vastupidavatest mobiilplatvormidest.
Tulevikuenergia: automatiseerimine taastuvenergia tootmisel
Taastuvenergia massiline laienemine nõuab suurte komponentide, näiteks tuuleturbiinide labade ja päikeseelektrijaamade, kiiremat ja kulutõhusamat tootmist ja paigaldamist.
Tuuleenergia: Tuuleturbiinilabade tootmisel kasutatakse roboteid järeltöötluseks (kärpimine, lihvimine, täitmine), mis parandab kvaliteeti ja vabastab töötajad ohtlikest ülesannetest. Automatiseeritud kiudude paigutamise (AFP) puhul asetavad robotkäed täpselt süsinikkiust või klaaskiust ribasid, et toota kergemaid ja tugevamaid rootorilabasid. Spetsiaalsed robotsüsteemid töötlevad labade juuri (saagimine, freesimine, puurimine) ja vähendavad tsükliaega kuni 50% võrreldes tavapäraste masinatega.
Päikeseenergia: Ettevõtted nagu Charge Robotics ja Terabase arendavad mobiilseid „tehaseid“, mis monteerivad automaatselt kokku ja paigaldavad terveid päikesepaneelide sektsioone otse päikeseelektrijaamade ehitusplatsidele, potentsiaalselt tootlikkust kahekordistades. AES-i robot „Maximo“ kasutab tehisintellekti, LiDAR-i ja masinnägemist päikesepaneelide raskete esemete tõstmise ja kokkupaneku automatiseerimiseks, vähendades aega ja kulusid kuni 50%. Comau Hyperflexi süsteem on poolhaagises asuv mobiilne tehas, mis monteerib ja paigaldab päikeseenergia jälgimisseadmeid otse põllul.
Rasketööstuse moderniseerimine: laevaehitus ja lennundus
Laevaehitus: See traditsiooniliselt väheautomaatikaga tööstusharu on hakanud kasutama mobiilseid raskeveokite roboteid. Comau ja Fincantieri laevatehase koostöös välja töötatud MR4Weld on autonoomne mobiilne keevitusrobot, mis suudab laevatehase struktureerimata keskkonnas navigeerida ja keevitada suuri kereosi. See toob massiivsete teraskonstruktsioonide kokkupanekusse uut paindlikkust ja tõhusust.
Lennundus: Siin kasutatakse ülitäpseid raskeveokite roboteid suurte lennukikomponentide, näiteks tiibade ja kereosade puurimiseks, neetimiseks ja ühendamiseks, kus on vaja suurimat täpsust ja korduvust.
Ringmajanduses tsükli sulgemine
Jätkusuutlikkuse eesmärgid ja ELi eeskirjad suurendavad vajadust keerukate toodete tõhusa ringlussevõtu ja ümbertöötlemise järele.
Automatiseeritud demonteerimine: Tugevdatud robotid sobivad ideaalselt suurte ja raskete toodete demonteerimiseks.
Elektriautode akud: Tänu oma suurele kaalule ja võimalikele ohtudele (elektrilised, keemilised) on robotite abil elektriautode akude demonteerimine ohutu ja ökonoomse ringlussevõtu seisukohalt ülioluline. Uurimisprojektide käigus arendatakse robotelemente, mis eraldavad automaatselt aku mooduleid ja elemente.
Suured elektroonikaseadmed ja mootorid: Fraunhoferi Instituut töötab robotsüsteemide kallal, mis kasutavad tehisintellekti ja masinnägemist arvutite, pesumasinate ja elektrimootorite automaatseks lammutamiseks, et taaskasutada väärtuslikke materjale, nagu vask ja haruldaste muldmetallide magnetid. See on oluline samm linnakaevandamise rajamise suunas.
Neil uutel rakendusaladel on üks ühine joon: need nihutavad roboti tehasepõranda väga struktureeritud ja etteaimatavast keskkonnast dünaamilisse, struktureerimata ja sageli karmi "välja". See keskkonnamuutus on tehisintellekti, anduritehnoloogia ja mehhatroonika tehnoloogilise arengu peamine edasiviiv jõud. Tehniline väljakutse nihkub korduvate liigutuste optimeerimiselt ebakindluse juhtimisele. Edasine edu sõltub vähem kiiruse või täpsuse järkjärgulisest parandamisest ja rohkem läbimurretest keskkonnataju, autonoomse navigeerimise ja adaptiivse ülesannete planeerimise valdkonnas.
Meie soovitus: 🌍 Piiramatu ulatus 🔗 Ühenduses 🌐 Mitmekeelne 💪 Müügijõud: 💡 Autentne strateegia 🚀 Innovatsioon kohtub 🧠 Intuitsioon


Kohalikust globaalseks: VKEd vallutavad nutika strateegiaga maailmaturu - Pilt: Xpert.Digital
Ajastul, mil ettevõtte digitaalne kohalolek määrab selle edu, seisneb väljakutse autentse, isikupärastatud ja laiaulatusliku kohaloleku loomises. Xpert.Digital pakub uuenduslikku lahendust, mis positsioneerib end tööstuskeskuse, ajaveebi ja brändisaadiku ristumiskohana. See ühendab suhtlus- ja müügikanalite eelised ühel platvormil ning võimaldab avaldamist 18 erinevas keeles. Koostöö partnerportaalidega ning võimalus avaldada artikleid Google Newsis ja umbes 8000 ajakirjaniku ja lugejaga pressiteadete levitamisnimekirjas maksimeerivad sisu ulatust ja nähtavust. See on välise müügi ja turunduse (SMarketing) oluline tegur.
Lisateavet leiate siit:
Kasv, võimalused, takistused: strateegiad raskeveokite robootika jaoks
Koostöö piir: ohutu inimese ja roboti interaktsioon suure kandevõimega
Tärkav ja pealtnäha vastuoluline trend on koostööpõhimõtete rakendamine robotite puhul, mis on võimelised avaldama potentsiaalselt surmavaid jõude. See areng muudab raskeveokite robotid isoleeritud masinatest võimsateks meeskonnakaaslasteks.
Puurist väljas: koostöö spekter
Traditsiooniline ohutuskontseptsioon, mis seisneb raskeveokite robotite käitamises ohutusruumides, on ebaefektiivne ja loob jäiga lahususe inimese ja masina ülesannete vahel. Kaasaegne inimese ja roboti koostöö (HRC) ei ole aga ühtne kontseptsioon, vaid spekter, mis ulatub lihtsast kooseksisteerimisest (robot peatub, kui inimene siseneb tema tööalale) kuni tiheda koostööni (inimene ja robot töötavad samaaegselt sama tooriku kallal).
Selle lähenemisviisi peamine eelis on see, et erinevalt traditsioonilistest kergetest kobotidest ei ole koostöörobotite puhul piiranguid kandevõime, kiiruse ega täpsuse osas. Seega pakuvad nad parimat mõlemast maailmast: tööstusroboti jõudlust ja koostöörakenduse paindlikkust.
Ohutu ja raskeveokite MRK võtmetehnoloogiad
Inimese ja roboti ohutu koostöö raskeveokite robotitega on võimalik tänu täiustatud andurite ja intelligentsete juhtimisfunktsioonide kombinatsioonile.
Täiustatud ohutusandurid: Ohutu inimese ja roboti koostöö (HRC) aluseks on süsteemi võime tuvastada inimese kohalolekut ja kavatsusi. See saavutatakse ohutussertifitseeritud laserskannerite, 3D-kaamerate ja isegi rõhutundlike põrandate abil, mis loovad roboti ümber dünaamilised mitmekihilised kaitseväljad.
Kiiruse ja kauguse jälgimine (SSM): see on oluline koostöömeetod, kus roboti kiirus on pöördvõrdeline selle kaugusega inimesest. Inimese lähenedes aeglustab robot. Kui inimene jõuab liiga lähedale, peatub robot ohutult jälgitavalt. See võimaldab sujuvat ja tõhusat suhtlust ilma füüsiliste takistusteta.
Võimsuse ja jõu piiramine (PFL): Kuigi see on raskeveokite robotite suure inertsi tõttu keeruline, võimaldavad täiustatud juhtimissüsteemid ja iga liigendi pöördemomendi andurid isegi suurtel robotitel teatud ülesannete puhul töötada jõupiiranguga režiimis. Need peatuvad kohe ootamatu kokkupuute korral. Seda funktsiooni kasutatakse sageli käsitsi juhtimiseks või teisaldamiseks.
Standardimine ja riskihindamine: Ohutute inimese ja roboti koostöörakenduste (HRC) rakendamist reguleerivad standardid nagu EN ISO 10218 ja tehniline spetsifikatsioon ISO/TS 15066. Põhinõue on alati kogu rakenduse – st roboti, haaratsi, tooriku ja keskkonna – hoolikas riskihindamine. Isegi loomupäraselt ohutu robot suudab käsitseda ohtlikku tööriista.
Need arengud viivad termini "kobot" ümberdefineerimiseni. Traditsiooniliselt oli see termin sünonüüm väikestele, kergetele ja loomupäraselt ohututele robotkätele. Koostööfunktsioonide integreerimine raskeveokite tööstusrobotitesse murrab seda paradigmat. "Koostöö" areneb nimisõnast (roboti tüüp, "kobot") omadussõnaks või funktsioonide kogumiks ("koostööroboti rakendus"). Tulevik ei seisne binaarses valikus "koboti" ja "tööstusroboti" vahel, vaid sobiva kandevõime ja jõudlusega tööstusroboti valimises, mis seejärel varustatakse konkreetse rakenduse jaoks vajalike koostööl põhinevate ohutusfunktsioonidega. See laiendab dramaatiliselt inimese ja roboti koostöö (HRC) potentsiaali valdkondadesse, mis varem olid inimese ja masina tihedale koostööle ligipääsmatud, näiteks raskeveokite montaaži või logistika.
RaaS selgitab: kuidas ettevõtted saavad robotite turule sisenemise barjääri alandada
Raskeveokite robotite turg on valmis jätkusuutlikuks kasvuks, mida juhib tehnoloogiline innovatsioon ja laienemine uutesse sektoritesse. Edukas rakendamine nõuab aga ettevõtetelt strateegilisi otsuseid, mis ulatuvad pelgast tehnoloogia hindamisest kaugemale.
Turu suuruse ja kasvu prognoosid
Globaalne tööstusrobootika turg on märkimisväärne ja kasvav sektor. Turu suuruse prognoosid varieeruvad sõltuvalt analüüsi ulatusest ja metoodikast, kuid näitavad järjepidevalt positiivset trendi
- Analüüsis prognoositakse kasvu 33,9 miljardilt USA dollarilt 2024. aastal 60,5 miljardi USA dollarini 2030. aastaks, mis vastab 9,9% liitkasvumäärale aastas.
- Teises uuringus prognoositakse kasvu 16,9 miljardilt USA dollarilt (2024) 29,4 miljardi USA dollarini 2029. aastaks (aastane kasvumäär 11,7%).
- Kolmas prognoos ennustab kasvu 19,9 miljardilt USA dollarilt (2024) 55,5 miljardi USA dollarini 2032. aastaks (aastane kasvumäär 14,2%).
„Raskeveokite robotplatvormide” turu suuruseks hinnati 2024. aastal 333,5 miljonit USA dollarit ja prognoositakse 2030. aastaks 446,0 miljonit USA dollarit (aastane kasvumäär 5,0%). Erinevus üldiste näitajatega näitab, et raskeveokite robotid moodustavad väärtusmahuka, kuid keskmisest väiksema osa turust.
Rahvusvahelise Robootika Föderatsiooni (IFR) andmetel saavutas tööstusrobotite ülemaailmne arv 2023. aastal rekordilise 4,28 miljoni ühikuni, mis on 10% rohkem kui eelmisel aastal. Kuigi 2024. aastal toimus ajutine turu kahanemine, eeldatakse, et pikaajaline kasvutrend taastub alates 2025. aastast. Aasia, eriti Hiina, on endiselt suurim ja kiiremini kasvav turg, moodustades 70% uutest installatsioonidest.
Peamised kasvutegurid ja takistused
Kasvumootorid:
- Oskuste puudus ja demograafilised muutused: paljudes tööstusriikides soodustab kvalifitseeritud töötajate puudus füüsiliselt nõudlike ja korduvate ülesannete automatiseerimist.
- Tööstus 4.0 ja nutikas tootmine: tootmise võrgustamine ja digitaliseerimine nõuavad kesksete komponentidena intelligentseid ja paindlikke roboteid.
- Uute sektorite arendamine: Kasvu soodustab üha enam sisenemine autotööstusest väljapoole jäävatesse tööstusharudesse, näiteks logistika, ehitus ja taastuvenergia.
- Jätkusuutlikkus ja tootmise ümberpaigutamine: robotid parandavad materjalitõhusust, vähendavad jäätmeid ja võimaldavad kulutõhusat tootmist oma riigis.
Takistused:
- Suured alginvesteeringud: Roboti, selle integreerimise ja vajalike välisseadmete kulud kujutavad endast märkimisväärset takistust, eriti väikeste ja keskmise suurusega ettevõtete (VKEde) jaoks.
- Integratsiooni keerukus: Vaatamata kasutajasõbralikumatele liidestele võib robotite integreerimine olemasolevatesse pärandsüsteemidesse ja koostalitlusvõime tagamine jääda keeruliseks.
Strateegilised rakendamise imperatiivid
Ettevõtete jaoks, kes kaaluvad raskeveokite robotite kasutamist, on järgmised strateegilised kaalutlused üliolulised:
- Fookuse nihkumine kapitalikuludelt (Capex) kogukuludele (TCO) ja investeeringutasuvusele (ROI): investeerimisotsused ei tohiks põhineda ainult ostuhinnal. Oluline on terviklik analüüs kogukulude (TCO) – sealhulgas energiatarbimise, hoolduse ja kättesaadavuse – ning investeeringutasuvuse (ROI) – mida juhivad suurem läbilaskevõime, parem kvaliteet ja vähenenud tööjõukulud – kohta.
- Uute ärimudelite kasutamine: sellised mudelid nagu robootika teenusena (RaaS) vähendavad esialgse investeerimisbarjääri, võimaldades ettevõtetel rentida robotivõimalusi tegevuskuluna, mitte teha kapitaliinvesteeringuid.
- Personali arendamisse investeerimine: Programmeerimise lihtsustamine ei kaota vajadust kvalifitseeritud töötajate järele. Pigem nihutab see vajalikud oskused puhtalt koodiprogrammeerimiselt kõrgema taseme ülesannetele, nagu protsesside optimeerimine, süsteemi jälgimine ja hooldus. Ettevõtted peavad investeerima oma töötajate täiendkoolitusse, et neid intelligentseid masinaid tõhusalt hallata ja nendega koostööd teha.
- Tarkvara ja ökosüsteemide prioriseerimine: Roboti valimisel peaksid peamisteks kriteeriumiteks olema tootja tarkvaraplatvorm, selle kasutusmugavus ja partnerökosüsteemi ulatus. Tugev ökosüsteem pakub juurdepääsu eelintegreeritud lahendustele ja muudab investeeringu tulevikukindlaks muutuvate nõuete suhtes.
Oleme teie jaoks olemas - Konsultatsioon - Planeerimine - Teostus - Projektijuhtimine
☑️ VKEde tugi strateegia, konsultatsioonide, planeerimise ja rakendamise alal
☑️ Digitaalse strateegia loomine või ümberkorraldamine ja digitaliseerimine
☑️ Rahvusvaheliste müügiprotsesside laiendamine ja optimeerimine
☑️ Globaalsed ja digitaalsed B2B kauplemisplatvormid
☑️ Pioneer Äriarendus

Konrad Wolfenstein
Mul oleks hea meel olla teie isiklik nõustaja.
Võite minuga ühendust võtta, täites alloleva kontaktvormi või helistades mulle numbril +49 7348 4088 965 .
Ootan põnevusega meie ühist projekti.
Kirjuta mulle



Xpert.Digital - Konrad Wolfenstein
Xpert.Digital on tööstuskeskus, mis keskendub digitaliseerimisele, masinaehitusele, logistikale/siselogistikale ja fotogalvaanikale.
Meie 360° äriarenduslahendusega toetame tuntud ettevõtteid alates uutest klientidest kuni järelmüügini.
Turu-uuring, s-turundus, turunduse automatiseerimine, sisu loomine, suhtekorraldus, meilikampaaniad, personaalne sotsiaalmeedia ja müügivihjete haldamine on osa meie digitaalsetest tööriistadest.
Lisateavet leiate aadressilt: www.xpert.digital - www.xpert.solar - www.xpert.plus
Hoidke ühendust