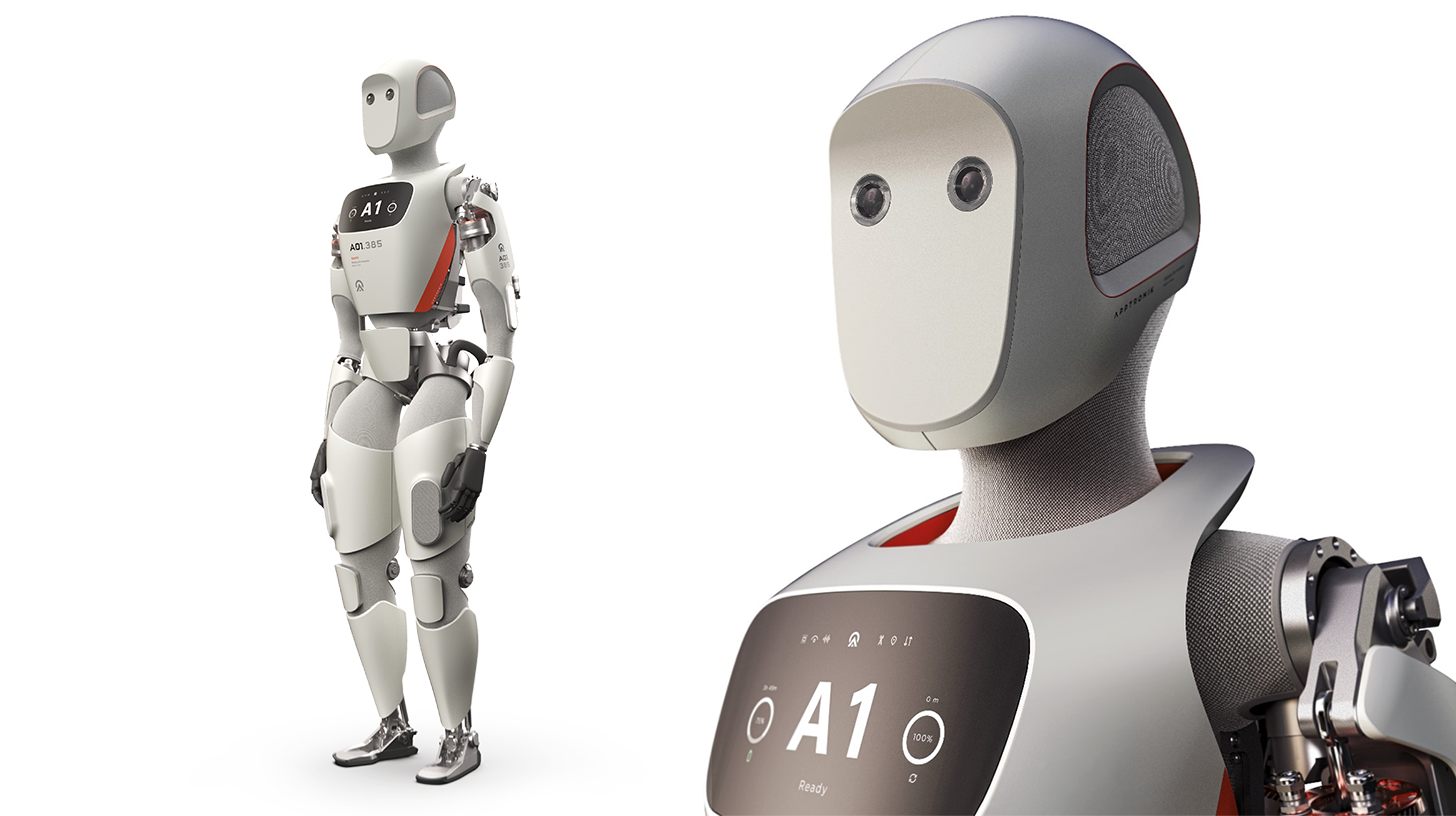
Humanoidsed laorobotid: Apptronik Apollo – mitmekülgne humanoidrobotite teerajaja logistikas ja tootmises – Pilt: Apptronik
Automatiseerimise järgmine etapp: humanoidrobotid tööstuslikus kasutuses (lugemisaeg: 48 min / reklaamivaba / tasulise müürivaba)
Humanoidrobotite esiletõus tööstuses
Maailmas, mida iseloomustab kiire tehnoloogiline areng ja üha suurem keskendumine automatiseerimisele, siseneb tööstusvaldkonda uus robotite põlvkond: humanoidrobotid. Need inimlaadsed masinad, mis kunagi olid ulmekirjanduse pärusmaa, on nüüd saamas reaalsuseks ja lubavad töömaailma põhjalikult muuta. Selle arengu esirinnas on Apptronik Apollo, mitmekülgne humanoidrobot, mis on spetsiaalselt loodud logistika ja tootmise nõudlike ülesannete jaoks.
Apptronik, uuenduslik Texase idufirma, soovib robootika piire uuesti defineerida. Apollo näol esitlevad nad robotit, mis avaldab muljet mitte ainult oma tehniliste võimete, vaid ka inimkeskse disaini ja olemasolevatesse töökeskkondadesse integreeritavuse poolest. See aruanne uurib Apollo roboti põnevaid detaile, selle potentsiaalseid rakendusi logistikas ja tootmises, sellega seotud eeliseid ja väljakutseid, samuti selle põneva tehnoloogia konkurentsimaastikku ja tulevikuväljavaateid.
Apptronik ja Apollo: Visioonist saab reaalsus
Apptronik: asutamine ja missioon – inimesed ja masinad harmoonias
Apptronik asutati 2016. aastal selge visiooniga: arendada järgmise põlvkonna roboteid, mis pole mitte ainult tõhusad ja võimsad, vaid seavad esikohale ka inimese ja masina koostöö. Asutamiskuupäev, mida kinnitavad mitmed allikad, näiteks ettevõtte veebisait, Pitchbook ja Tracxn, rõhutab selle noore ettevõtte kindlat alust.
Apptroniku juured peituvad Texase Ülikooli Austinis asuvas tuntud inimkeskse robootika laboris. See akadeemiline alus on ülioluline, kuna see andis ettevõttele tugeva teadustausta ja juurdepääsu kõrgelt kvalifitseeritud talentidele algusest peale. Hargneva ettevõttena sai Apptronik kasu ülikooli ressurssidest ja oskusteabest, mis kiirendas oluliselt ettevõtte tehnoloogilist arengut.
Apptroniku missiooni saab kokku võtta lühikese lausega: „See pole inimene masina vastu, vaid inimene + masin.“ See filosoofia on ettevõtte eetose keskmes ja rõhutab robotite koostööd tegevat rolli. Inimtöötajate asendamise asemel on robotid mõeldud tööriistadeks, mis suurendavad ja täiendavad inimvõimeid. See inimkeskne lähenemine eristab Apptronikut paljudest teistest robootikaettevõtetest ja võib olla võtmeks selle tehnoloogia laialdasele aktsepteerimisele erinevates tööstusharudes. Ettevõtted, kes on mures automatiseerimise eetiliste tagajärgede ja oma töötajate moraali pärast, leiavad, et see filosoofia on oluline tugipunkt.
Apptroniku üldeesmärk on arendada masinaid, mis võimaldavad inimestel oma täielikku potentsiaali saavutada. See ambitsioonikas eesmärk ulatub kaugemale pelgalt ülesannete automatiseerimisest. Apptronik püüab hägustada piire kunsti ja tehnoloogia vahel ning luua tuleviku, kus robotid ja inimesed töötavad sujuvalt koos, et saavutada suuri asju. See pikaajaline visioon osutab laiale rakendusvaldkonnale, mis ulatub logistikast ja tootmisest kaugemale, hõlmates selliseid valdkondi nagu tervishoid, eakate hooldus ja paljud teised sektorid, kus humanoidrobotid saavad anda väärtusliku panuse.
Apptroniku senine areng on muljetavaldav. Ettevõte on juba välja töötanud laia valiku roboteid, sealhulgas eksoskelette inimeste abistamiseks, humanoidtorsosid uurimisotstarbeks, kahejalgseid liikumisplatvorme keeruliste keskkondade jaoks ja ainulaadseid robotkäsi täppisülesannete jaoks. See mitmekesine kogemus robootikas on andnud Apptronikule kindla aluse humanoidroboti Apollo arendamiseks. Erinevat tüüpi robotitega töötamine on andnud väärtuslikke teadmisi sellistes valdkondades nagu ajamid, juhtimissüsteemid, liikuvus ja inimese ja roboti interaktsioon, mis kõik on Apollo arendusse integreeritud.
Sellega seotud:


Apollo teke: innovatsiooni kümnend
Apollo ei ole lihtsalt üleöö ilmunud robot. See on Apptroniku peaaegu kümme aastat kestnud intensiivse uurimis- ja arendustegevuse tulemus. 15 eelmise robotimudeli, sealhulgas NASA Valkyrie roboti kallal töötamisel saadud kogemused ja teadmised aitasid Apollo arengule oluliselt kaasa. See pikk arendusaeg ja muljetavaldav arv eelkäijaid näitavad Apptroniku meeskonna küpsust ja asjatundlikkust. Võrreldes humanoidrobotite valdkonnas uute ettevõtetega on Apptronikul märkimisväärne kogemuste edumaa.
Eriti tähelepanuväärne on seos NASA-ga ja osalemine Valkyrie roboti väljatöötamises. NASA on tuntud oma asjatundlikkuse poolest nõudlikes tehnoloogilistes projektides ning koostöö Valkyrie, katastroofiabi ja kosmosemissioonide jaoks mõeldud ülimalt arenenud humanoidroboti, väljatöötamisel on andnud Apptronikule hindamatuid teadmisi ja oskusi. Apptroniku asutajad tegid NASA-ga esimest koostööd 2015. aastal DARPA robootikaväljakutse raames. See osalemine ühel maailma prestiižseimal robootikavõistlusel rõhutab ettevõtte keskendumist robotite arendamisele reaalsete ja keeruliste stsenaariumide jaoks. DARPA robootikaväljakutse eesmärk oli arendada roboteid, mis on võimelised töötama keerulistes ja ohtlikes keskkondades, ning osalemine selles võistluses on sügavalt kujundanud Apptroniku arendusprotsesse ja disainifilosoofiat.
Apollo esitleti ametlikult 2023. aastal. See oli Apptroniku jaoks oluline verstapost, kuna humanoidrobot liikus arendusetapist turuletoomise faasi. Apollo kavandamisel keskenduti algusest peale inimsõbralikule suhtlusele, masstootmisele, suurele jõudlusele ja ohutusele. Need disainiprioriteedid peegeldavad Apptroniku soovi luua humanoidrobot, mis pole mitte ainult tehnoloogiliselt arenenud, vaid ka praktiline ja sobib laialdaseks omaksvõtuks inimkesksetes keskkondades. Keskendudes "inimsõbralikule suhtlusele", peetakse silmas kasutusmugavust ja inimkolleegide poolt omaksvõttu, samas kui "masstootmine" on suunatud skaleeritavusele ja kulutõhususele. "Suur jõudlus" tagab, et Apollo suudab talle määratud ülesandeid usaldusväärselt ja tõhusalt täita ning "ohutus" on esmatähtis, eriti tööstuskeskkondades, kus inimesed ja robotid teevad tihedat koostööd.
Apollo roboti tehnilised andmed: pilk kapoti alla
Füüsilised omadused: Inimese mõõtmed optimaalseks integratsiooniks
1,73 meetrit (5 jalga 8 tolli) pikk ja 72,6 kilogrammi (160 naela) kaaluv Apollo on suuruse poolest selline, et see integreerub sujuvalt inimestele mõeldud tööruumidesse. See inimsuurus on oluline eelis, kuna Apollo saab kasutada olemasolevat infrastruktuuri, tööriistu ja töövooge ilma ulatuslike muudatusteta. Ladudes saab Apollo hõlpsalt navigeerida inimtöötajatele ja kahveltõstukitele mõeldud vahekäikudes. Tootmisettevõtetes saab seda kasutada tööjaamades, mis on optimeeritud inimestest monteerijatele.
Ka Apollo kaal on hoolikalt valitud. 72,6 kilogrammi juures on see piisavalt vastupidav ja stabiilne raskete koormate tõstmiseks ja teisaldamiseks, kuid samas piisavalt kerge, et inimesed saaksid seda vajadusel liigutada või ümber paigutada. See stabiilsuse ja liikuvuse tasakaal on oluline praktiliseks kasutamiseks dünaamilistes töökeskkondades.
Sooritus: Jõud, vastupidavus ja kohanemisvõime
Apollo uhkeldab muljetavaldava 25 kilogrammi (55 naela) kandevõimega, mõned allikad nimetavad isegi 29 kilogrammi. See tõstejõud võimaldab Apollol käsitseda laia valikut tüüpilisi kaste, konteinereid ja materjale, mida logistikas ja tootmises tavaliselt leidub. Olgu selleks siis kaupade komplekteerimine laos, kastide kaubaalustele virnastamine või masinate laadimine tootmises, Apollo suudab neid ülesandeid tõhusalt ja usaldusväärselt täita. Väike erinevus kandevõime näitajate vahel (25 kg vs 29 kg) võib olla tingitud erinevatest testimistingimustest või roboti konfiguratsioonidest, kuid see ei muuda fakti, et Apollo pakub selles valdkonnas märkimisväärset jõudlust.
Apollo aku tööiga on 4 tundi aku kohta. Tööstuskeskkonnas, kus tootlikkus ja pidev töö on kriitilise tähtsusega, on pikk aku tööiga hädavajalik. Neli töötundi võimaldab Apollol töötada terve vahetuse või selle märkimisväärse osa, enne kui aku vahetamine on vajalik. Seisakuaja minimeerimiseks ja pideva töö tagamiseks on Apollol vahetatavad akud. See tähendab, et akusid saab roboti töötamise ajal vahetada, ilma seda välja lülitamata. Vahetatavate akude süsteemiga on potentsiaalselt võimalik saavutada 22 tundi pidevat tööd. See võimekus on eriti oluline rakenduste puhul, mis vajavad katkematut tööd mitmes vahetuses. Väide 22-tunnise pideva töö kohta viitab vajadusele mitme akupaketi ja tõhusa akuhalduse järele, kuid peaaegu pideva töö võimalus on tööstuslike rakenduste jaoks suur eelis.
Apollo teine oluline omadus on jõujuhtimise arhitektuur. See tehnoloogia tagab ohutu töö inimeste läheduses, muutes Apollo omamoodi koostöörobotiks (kobotiks). Erinevalt tavapärastest tööstusrobotitest, mis ohutuskaalutlustel peavad tavaliselt töötama puurides või eraldatud aladel, saab Apollo töötada inimestest töötajate kõrval. Jõujuhtimine võimaldab Apollol reageerida ootamatutele kokkupõrgetele või takistusele ja koheselt oma liigutusi kohandada, et vältida vigastusi. See ohutusfunktsioon on ülioluline humanoidrobotite aktsepteerimiseks ja kasutamiseks inimkesksetes töökeskkondades.
Apollo modulaarne disain on selle mitmekülgsuse teine oluline aspekt. Roboti saab paigaldada erinevatele alustele, sealhulgas jalgadele ebatasasel maastikul või kitsastes vahekäikudes navigeerimiseks, ratastel alusele kiiremaks transportimiseks avatud aladel või pjedestaalile statsionaarsete tööde jaoks. See modulaarsus võimaldab Apollot kohandada erinevate ülesannete ja keskkondadega logistika- või tootmisüksuses. Aluse muutmisega saab Apollot optimeerida laia rakenduste valiku jaoks, suurendades selle potentsiaalset ulatust ja investeeringutasuvust. Näiteks saaks Apollot laos kasutada jalgadel kaupade riiulitelt komplekteerimiseks ja seejärel muuta ratastel alusele kiiremaks kaubaaluste transportimiseks.
Ainulaadne tehnoloogia: lineaarsed ajamid ja intuitiivne interaktsioon
Apollo erineb paljudest teistest humanoidrobotitest selle poolest, et ta kasutab tavapäraste pöördajamite asemel lineaarajameid. See uuenduslik tehnoloogia on Apollo disaini põhiaspekt ja pakub mitmeid potentsiaalseid eeliseid. Lineaarajamid jäljendavad inimese lihaste mehaanikat täpsemalt kui pöördajamid. Need genereerivad lineaarset liikumist, sarnaselt lihase kokkutõmbumisele ja lõdvestumisele. Seevastu pöördajamid genereerivad pöörlevat liikumist, mis tuleb seejärel keerukate hammasrataste ja mehhanismide abil lineaarseks liikumiseks muuta.
Lineaarajamite kasutamine võib pakkuda Apollole eeliseid kulude, lihtsuse, töökindluse ja tarneahela osas. Lineaarajamid on üldiselt lihtsama konstruktsiooniga ja odavamad toota kui keerukad hammasratastega pöördajamid. Lihtsam mehaanika võib kaasa tuua ka suurema töökindluse ja madalamad hoolduskulud. Lisaks võiks lineaarajamite kasutamine lihtsustada tarneahelat, kuna need võivad olla kergemini kättesaadavad ja vähem spetsialiseeritud kui teatud tüüpi pöördajamid. Oluline on märkida, et see on humanoidrobotites suhteliselt ebatavaline lähenemisviis ja jääb üle oodata, kuidas see tehnoloogia praktikas toimib. Apptronik on aga tugevalt investeerinud lineaarajamite eelistesse ja näeb neid olulise konkurentsieelisena.
Ümbruskonna täiustatud tajumiseks on Apollo varustatud stereonägemisega. Stereonägemine võimaldab robotil tajuda ruumilist sügavust ja luua oma keskkonnast kolmemõõtmelise mudeli. See on ülioluline navigeerimiseks, objektide tuvastamiseks ja manipuleerimiseks. Kasutades kahte teineteisest veidi nihutatud kaamerat, saab Apollo hinnata vahemaid ning täpselt määrata objektide kuju ja asukohta.
Inimesega suhtlemise hõlbustamiseks ja roboti kasutajasõbralikumaks muutmiseks on Apollo varustatud intuitiivsete suhtlusvõimalustega. Selle peas, suus ja rinnal olevad LED-id näitavad visuaalselt roboti olekut ja kavatsusi. Digitaalseid paneele selle näol ja rinnal saab kasutada keerukama teabe ja sõnumite kuvamiseks. Nende funktsioonide eesmärk on muuta inimese ja roboti suhtlus loomulikumaks ja intuitiivsemaks, suurendades seeläbi Apollo aktsepteerimist töökeskkondades. Näiteks saaks LED-e kasutada selleks, et näidata, kas Apollo täidab parasjagu ülesannet, ootab juhiseid või kogeb viga. Digitaalseid paneele saaks kasutada üksikasjalikuma teabe kuvamiseks, näiteks praeguse ülesande, aku taseme või hoiatusteadete kohta.
Apollo aju, selle peamine arvutisüsteem, põhineb integreeritud NVIDIA Jetson AGX Orini ja Jetson Orini NXi moodulitel. NVIDIA Jetsoni platvorme kasutatakse laialdaselt robootikas ja tehisintellekti uuringutes ning need on tuntud oma suure arvutusvõimsuse ja madala energiatarbimise poolest. Nende võimsate moodulite kasutamine viitab sellele, et Apollol on märkimisväärsed tehisintellekti töötlemisvõimalused autonoomseks tööks, reaalajas pilditöötluseks, masinõppeks ja keerukate otsuste langetamiseks. NVIDIA Jetsoni platvormid võimaldavad Apollol käitada keerukaid tehisintellekti algoritme, mis on vajalikud dünaamilistes keskkondades navigeerimiseks, objektide tuvastamiseks, liikumise planeerimiseks ja inimestega suhtlemiseks.
Sellega seotud:

Apollo rakendused logistikas: kaubavoogude efektiivsuse suurendamine
Spetsiifilised logistikaülesanded: mitmekülgsus laos
Apollo on spetsiaalselt loodud laia valiku tavaliste logistikaülesannete jaoks. Selle mitmekülgsus teeb sellest väärtusliku tööriista ladudes, jaotuskeskustes ja muudes logistikaasutustes. Apollo ülesanded hõlmavad järgmist:
Kastide korjamine
Apollo saab riiulitelt või kaubaalustelt üksikuid kaste või konteinereid eemaldada ja edasiseks töötlemiseks või saatmiseks ette valmistada.
Haagiste virnastamine ja mahalaadimine
Apollo saab veoautosid või konteinereid maha laadida, võttes kaste või pakke ja asetades need konveierilintidele või kaubaalustele.
Kaubaaluste pakkimine
Apollo saab kaste või pakke süstemaatiliselt kaubaalustele laduda, et neid transportimiseks või ladustamiseks ette valmistada.
Sorteeri
Apollo saab esemeid sortida erinevate kriteeriumide alusel, näiteks suurus, kaal, sihtkoht või tootetüüp.
Haagiste laadimine
Apollo saab kaubaaluseid või üksikuid esemeid veoautodesse või konteineritesse laadida.
Materjalide transport
Apollo saab transportida materjale ja kaupu laos või jaotuskeskuses, nt erinevate tööpiirkondade vahel või saatmispiirkondadesse.
tellimuste komplekteerimise ülesanded
Apollo saab aidata klientide tellimuste komplekteerimisel, leides ja pakkudes laost vajalikke kaupu.
Liini kohaletoimetamine
Apollo saab varustada tootmisliine materjalide või komponentidega, et tagada sujuv tootmisvoog.
ülevaatus
Apollo saab kaupu või laoseisu kahjustuste või defektide suhtes kontrollida.
Tellimuse töötlemine
Apollo saab automatiseerida tellimuste töötlemise erinevaid etappe alates komplekteerimisest kuni saatmiseni.
Varude haldamine
Apollo saab aidata varude haldamisel, skannides riiuleid ja värskendades laoseisu reaalajas.
Laorakendustes suudab Apollo tõsta ja transportida kuni 25 kg kaaluvaid koormaid, samal ajal tõhusalt vahekäikudes navigeerides. Selle võime töötada inimkeskses keskkonnas muudab selle ideaalseks integreerimiseks olemasolevatesse laotoimingutesse. Apollot saab kasutada nii automatiseeritud kui ka traditsioonilistes käsitsi juhitavates ladudes.
Pilootprogrammid ja partnerlused logistikas: praktiline test GXO Logisticsis
Apollo toimivuse valideerimiseks reaalsetes logistikakeskkondades viib Apptronik läbi varajase kontseptsiooni tõestuse programmi tuntud logistikateenuse pakkujaga GXO. GXO on logistikavaldkonnas globaalne tegija, kes haldab ladusid ja jaotuskeskusi kogu maailmas laiale kliendibaasile. Pilootprogrammi osana testitakse Apollot esialgu GXO laborikeskkonnas, et hinnata selle võimekust ja jõudlust kontrollitud tingimustes. Pärast laborikatsete edukat läbimist on plaanis Apollo võimalik kasutuselevõtt GXO jaotuskeskuses USA-s.
See partnerlus GXO-ga on Apptroniku jaoks strateegiliselt väga oluline. GXO pakub Apollole võimaluse demonstreerida oma võimeid nõudlikus reaalses logistikakeskkonnas. Edukas pilootprojekt GXO-ga võiks sillutada teed Apollo laiemale kasutuselevõtule logistikatööstuses. Lisaks saab Apptronik kasu kogenud logistikaettevõtte GXO asjatundlikkusest ja tagasisidest, et Apollot veelgi optimeerida ja kohandada seda tööstuse konkreetsetele vajadustele. GXO jaoks annab partnerlus võimaluse uurida robootika uusimaid edusamme ja hinnata humanoidrobotite potentsiaali oma tegevuse automatiseerimiseks ja tõhususe suurendamiseks.
Mõju logistikaprotsessidele: tööjõupuudus ja efektiivsuse paranemine
Apollol on potentsiaali logistikatoiminguid mitmel moel revolutsiooniliselt muuta ja lahendada mõningaid valdkonna suurimaid väljakutseid. Üks logistika pakilisemaid probleeme on kasvav tööjõupuudus. Nõudlus logistikateenuste järele kasvab pidevalt, eriti tänu õitsvale e-kaubandussektorile, samal ajal kui tööjõu pakkumine paljudes piirkondades väheneb. Apollo saab aidata selle tööjõupuudusega võidelda, võttes enda peale korduvaid, füüsiliselt nõudlikke ja ebaatraktiivseid ülesandeid, mille jaoks on üha raskem leida inimtöötajaid.
Nende ülesannete automatiseerimise abil saab Apollo parandada töötajate rahulolu ja püsivust. Inimeste vabastamine monotoonsetest ja füüsiliselt nõudlikest tegevustest võimaldab neil keskenduda keerukamatele ja rahuldustpakkuvamatele ülesannetele, mis rakendavad paremini nende oskusi ja teadmisi. See võib suurendada motivatsiooni, vähendada töötajate voolavust ja parandada üldiselt töökeskkonda.
Apollo teine oluline eelis on selle potentsiaal suurendada logistikatoimingute tõhusust ja tootlikkust. Robotid suudavad ülesandeid täita kiiremini, täpsemalt ja järjepidevamalt kui inimesed, eriti korduvate tegevuste puhul. Apollo juurutamisega saavad ettevõtted lühendada oma tellimuste täitmise aegu, vähendada veamäära ning suurendada oma ladude ja jaotuskeskuste üldist mahutavust. Automatiseerimise eesmärk on suurendada tootmist, vähendades samal ajal potentsiaalselt pikaajalisi tegevuskulusid. See on ettevõtetele veenev argument robootikasse investeerimiseks, kuna see lubab selget majanduslikku kasu.
Apollo aitab vähendada ka ülepingest ja korduvatest liigutustest tingitud tööga seotud vigastusi. Logistikatööstuses on füüsiliselt nõudlikud ülesanded, nagu raskete koormate tõstmine, kandmine ja virnastamine, tavalised, mis võivad põhjustada luu- ja lihaskonna vaevusi ning muid vigastusi. Nende ülesannete ülevõtmisega saab Apollo parandada töötajate ohutust, vähendades samal ajal kindlustus- ja töölt puudumise kulusid. See on kooskõlas kasvava tähelepanuga töötajate heaolule ja rangete ohutusnõuete järgimisele.
Apollo modulaarne disain pakub logistikatoimingute jaoks suuremat paindlikkust ja kohanemisvõimet. Aluspõhja muutes saab Apollot optimeerida erinevate ülesannete ja keskkondade jaoks. Näiteks saaks Apollot kasutada jalgadel kitsastes laokäikudes navigeerimiseks ja seejärel muuta ratastel alusele kaubaaluste kiiremaks transportimiseks avatud aladel. See paindlikkus võimaldab ettevõtetel kohandada Apollot oma konkreetsete vajadustega ja optimeerida selle jõudlust erinevate logistika töövoogude jaoks.
Meie soovitus: 🌍 Piiramatu ulatus 🔗 Ühenduses 🌐 Mitmekeelne 💪 Müügijõud: 💡 Autentne strateegia 🚀 Innovatsioon kohtub 🧠 Intuitsioon


Kohalikust globaalseks: VKEd vallutavad nutika strateegiaga maailmaturu - Pilt: Xpert.Digital
Ajastul, mil ettevõtte digitaalne kohalolek määrab selle edu, seisneb väljakutse autentse, isikupärastatud ja laiaulatusliku kohaloleku loomises. Xpert.Digital pakub uuenduslikku lahendust, mis positsioneerib end tööstuskeskuse, ajaveebi ja brändisaadiku ristumiskohana. See ühendab suhtlus- ja müügikanalite eelised ühel platvormil ning võimaldab avaldamist 18 erinevas keeles. Koostöö partnerportaalidega ning võimalus avaldada artikleid Google Newsis ja umbes 8000 ajakirjaniku ja lugejaga pressiteadete levitamisnimekirjas maksimeerivad sisu ulatust ja nähtavust. See on välise müügi ja turunduse (SMarketing) oluline tegur.
Lisateavet leiate siit:
Tõhususe suurendamine: Apollo rakendusvõimalused automatiseerimises
Apollo rakendused tootmises: tuleviku tehase kujundamine
Spetsiifilised tootmisülesanded: universaalne robot tehasele
Sarnaselt oma rollile logistikas on Apollo loodud laia valiku tootmisülesannete jaoks. Selle mitmekülgsus teeb sellest potentsiaalselt universaalse roboti tehasekeskkondadesse ja rõhutab selle potentsiaali muuta toodete valmistamise viisi põhjalikult. Apollo tootmisülesanded hõlmavad järgmist:
Masina töö
Apollo saab juhtida masinaid, näiteks CNC-masinaid, survevalu masinaid või presse, sisestades toorikuid, käivitades programme ja jälgides tootmisprotsessi.
Liini kokkupanek
Apollo saab varustada tootmisliine komponentide või toorikutega, tagades seeläbi pideva tootmisvoo.
tooriku liikumine
Apollo saab transportida toorikuid erinevate tööjaamade või tootmisalade vahel.
Assamblee
Apollo saab toodete kokkupanekul abiks olla komponentide ühendamise, kruvide pingutamise või liimide pealekandmisega.
Masina laadimine
Apollo saab masinatesse sisestada või masinatest eemaldada raskeid või mahukaid toorikuid.
keevitamine
Apollo saab spetsiaalsete tööriistade abil teostada metallkonstruktsioonide või -komponentide keevitustöid.
kruvid
Apollo saab komponentide kinnitamiseks pingutada kruvisid või muid kinnitusvahendeid.
Poleerimine ja lihvimine
Apollo saab pindu poleerida või lihvida, et neid siluda või viimistleda.
Liimimine ja doseerimine
Apollo oskab liime või hermeetikuid täpselt doseerida ja peale kanda.
Kontroll ja kvaliteedikontroll
Apollo saab valmistatud tooteid kontrollida defektide või kvaliteedistandarditest kõrvalekallete suhtes.
Maalimine
Apollo saab pindu värvida või katta spetsiaalsete pihustusseadmetega.
Kvaliteedikontroll
Apollo saab teostada mitmesuguseid kvaliteedikontrolle, näiteks mõõtmete kontrolli, pinnakontrolli või funktsionaalseid teste.
See lai rakendatavus muudab Apollo atraktiivseks tootjatele, kellel on mitmekesised automatiseerimisnõuded. Olgu tegemist autotööstuse, elektroonikatööstuse, toiduainete tootmise või muude sektoritega, Apollot saab kasutada erinevates valdkondades protsesside optimeerimiseks ja efektiivsuse suurendamiseks.
Sellega seotud:

Koostöö ja testimine tootmises: Mercedes-Benz ja Jabil partneritena
Apptronik on loonud märkimisväärseid koostöösuhteid tootmistööstuse juhtivate ettevõtetega, et testida ja rakendada Apollo tehnoloogiat reaalsetes tootmiskeskkondades. Eriti oluline partnerlus on Mercedes-Benziga, mis on üks maailma prestiižsemaid autotootjaid. Mercedes-Benz katsetab oma tootmisüksustes Apollo humanoide, et automatiseerida madala kvalifikatsiooniga ja füüsiliselt nõudlikku käsitsitööd. Katsed toimuvad Saksamaa ja Ungari tehastes, mis rõhutab selle tehnoloogia globaalset olulisust.
Partnerlus Mercedes-Benziga annab tugeva signaali humanoidrobotite aktsepteerimisest ja potentsiaalist autotööstuses. Autotööstus on pikka aega olnud teerajajaks täiustatud automatiseerimistehnoloogiate kasutuselevõtul ning Mercedes-Benzi otsus Apollot testida näitab ettevõtte usaldust selle uue põlvkonna robotite jõudluse ja töökindluse vastu. Apptroniku jaoks annab koostöö Mercedes-Benziga väärtuslikku teavet autotööstuse spetsiifiliste nõuete ja väljakutsete kohta, võimaldades ettevõttel Apollot veelgi optimeerida ja kohandada vastavalt selle sektori vajadustele.
Teine oluline koostööprojekt toimub ülemaailmse tootmisteenuste pakkuja Jabiliga. Apptronik ja Jabil on sõlminud katselepingu ja strateegilise partnerluse, mis hõlmab mitut aspekti. Esiteks abistab Jabil Apollo humanoidrobotite tootmisel ja toetab nende masstootmist. Teiseks integreeritakse Apollo Jabili tootmisprotsessidesse, et parandada Jabili enda tehaste tõhusust ja automatiseerimist. Selle koostöö eriti ambitsioonikas eesmärk on, et Apollo robotid hakkaksid lõpuks ehitama ka teisi Apollo roboteid. See "robotite enesereplikatsiooni" visioon rõhutab humanoidrobotite pikaajalist potentsiaali tootmistööstust põhjalikult muuta. Koostöö Jabiliga on Apptroniku jaoks ülioluline, kuna see võimaldab ettevõttel Apollo tootmist laiendada, tootmiskulusid vähendada ja turule jõudmise aega kiirendada.
Integreerimine olemasolevatesse tootmissüsteemidesse: Lihtne rakendamine ilma tehasemuudatusteta
Apollo peamine eelis on võime töötada inimestele loodud keskkondades. See tähendab, et ettevõtted saavad Apollo integreerida oma olemasolevatesse tootmisüksustesse ilma ulatuslikke ja kulukaid tehasemuudatusi tegemata. Erinevalt traditsioonilistest tööstusrobotitest, mis sageli vajavad spetsiaalseid ohutusseadmeid, kaitsetõkkeid ja kohandatud infrastruktuuri, saab Apollo tavaliselt paigaldada otse inimeste tööjaamadesse. See integreerimise lihtsus vähendab oluliselt alginvesteeringuid ja automatiseerimisega seotud võimalikke häireid.
Apollo ohutu ja tõhusa töö tagamiseks tootmiskeskkondades teeb Apptronik tihedat koostööd Texas Instrumentsiga (TI). Texas Instruments on pooljuhtlahenduste juhtiv tootja ning omab ulatuslikke teadmisi funktsionaalse ohutuse, mootori juhtimise ja energiahalduse valdkonnas. Tänu sellele koostööle TI-ga saab Apptronik tagada, et Apollo vastab kõrgeimatele ohutusstandarditele, pakkudes samal ajal optimaalset jõudlust ja energiatõhusust. TI asjatundlikkus on ülioluline Apollo põhifunktsioonide ja ohutuse täiustamiseks nõudlikes tööstusrakendustes.
Mercedes-Benz kasutab uuenduslikku koolitusmeetodit, et valmistada Apollo roboteid ette tootmisülesanneteks. Teleoperatsiooni abil juhivad inimesed Apollot eemalt ning õpetavad sellele liigutusi ja töövooge. See meetod võimaldab Apollot kiiresti ja tõhusalt konkreetsete tootmisülesannete jaoks koolitada, enne kui see neid autonoomselt täidab. Teleoperatsioon võimaldab inimeste teadmiste ja oskuste otsest edastamist robotile, kiirendades seeläbi õppeprotsessi. Kui Apollo on põhiliigutused ja töövood selgeks õppinud, saab ta neid ülesandeid autonoomselt ja korduvalt täita. See koolitusmeetod võib oluliselt kiirendada robotite kasutuselevõttu konkreetsete tootmisülesannete jaoks ja lühendada aega produktiivse kasutamiseni.
Humanoidrobotite eelised logistikas ja tootmises: enamat kui lihtsalt automatiseerimine
Üldised eelised: paindlikkus, kohanemisvõime ja inimese ja roboti koostöö
Humanoidrobotid pakuvad logistikas ja tootmises hulgaliselt eeliseid, mis ulatuvad pelgast automatiseerimisest kaugemale. Nende ainulaadne osavuse, kohanemisvõime ja inimsarnase disaini kombinatsioon avab uusi võimalusi töövoogude optimeerimiseks ja töötingimuste parandamiseks.
Humanoidrobotite üks suurimaid eeliseid on nende paindlikkus ja kohanemisvõime. Erinevalt kitsalt määratletud ülesannete jaoks loodud spetsiaalsetest robotitest suudavad humanoidrobotid täita laiemat valikut ülesandeid ja kohaneda muutuvate nõuetega. Nende inimkuju ja võime liikuda erinevates keskkondades võimaldavad neil täita dünaamilisi rolle erinevates valdkondades. See paindlikkus on eriti väärtuslik tänapäevastes ladudes ja tehastes, kus nõuded võivad kiiresti muutuda ja oluline on kõrge kohanemisvõime.
Humanoidroboteid on lihtsam integreerida olemasolevatesse inimkesksetesse süsteemidesse. Kuna need on loodud töötama inimese loodud keskkondades, ei vaja nad tavaliselt ulatuslikke infrastruktuuri või töövoogude kohandusi. See vähendab juurutamiskulusid ja -aega, võimaldades kiiremat ja lihtsamat integreerimist olemasolevatesse töökeskkondadesse.
Võrreldes spetsialiseeritud robotitega suudavad humanoidrobotid täita laiemat valikut ülesandeid. See teeb nad eriti sobivaks tänapäevastele ladudele ja tehastele, kus tekib mitmesuguseid ülesandeid. Nende mitmekülgsus võimaldab ettevõtetel oma robotressursse tõhusamalt kasutada ja automatiseerida laiemat valikut protsesse.
Nende paindlikkus võimaldab neid kasutusele võtta isegi tipptundidel ilma oluliste tegevusalaste muudatusteta. Suure nõudluse või hooajaliste kõikumiste ajal saavad ettevõtted kiiresti ja lihtsalt kasutusele võtta humanoidroboteid, et luua lisavõimsust ja vältida kitsaskohti. See suurendab tegevuse reageerimisvõimet ja paindlikkust.
Humanoidrobotid saavad üle võtta ebameeldivaid ja füüsiliselt nõudlikke ülesandeid, vabastades inimtöötajaid keerukamaks ja lisaväärtust pakkuvamaks tööks. Monotoonsete, korduvate ja füüsiliselt kurnavate tegevuste automatiseerimise abil saavad ettevõtted parandada oma töötajate töötingimusi ja suurendada tööga rahulolu. Seejärel saavad inimesed keskenduda ülesannetele, mis nõuavad loovust, probleemide lahendamise oskusi ja inimlikku suhtlemist.
Nende liikuvus ja osavus võimaldavad neil käsitseda väga erinevaid objekte, mis on erineva kuju, suuruse ja kaaluga. Humanoidrobotid on võimelised haarama, liigutama ja manipuleerima laia valikut esemeid, muutes need sobivaks mitmesugusteks ülesanneteks logistikas ja tootmises.
Humanoidrobotite teine oluline eelis on loomulik ja intuitiivne suhtlemine inimestega. Nende inimlaadne disain ja suhtlemisvõime hõlbustavad koostööd ja suhtlemist inimestest kolleegidega. See soodustab robotite aktsepteerimist töökeskkondades ja võimaldab tõhusat inimese ja roboti koostööd.
Humanoidrobotid saavad üle võtta ohtlikke või korduvaid ülesandeid, vähendades seeläbi inimestest töötajate vigastuste ohtu ja parandades ohutust. Ohtlikes keskkondades või korduvate tegevuste puhul, mis võivad põhjustada pingutusvigastusi, saab roboteid kasutada töötajate ohutuse ja heaolu tagamiseks.
Kokkuvõttes viivad need võimalused logistika ja tootmisprotsesside tõhususe ja tootlikkuse paranemiseni. Ülesannete automatiseerimise, töötingimuste parandamise ja ressursside kasutamise optimeerimise abil saavad ettevõtted humanoidroboteid kasutada oma konkurentsivõime suurendamiseks ja äritulemuste parandamiseks.
Sellega seotud:


Tootmise spetsiifilised eelised: täpsus, järjepidevus ja kvaliteedi paranemine
Tootmises pakuvad humanoidrobotid täiendavaid spetsiifilisi eeliseid, mis aitavad otseselt kaasa tootmise kvaliteedi, tõhususe ja paindlikkuse parandamisele.
Humanoidrobotid pakuvad tootmisprotsessides paremat täpsust ja järjepidevust. Nende täpsed liigutused ja võime ülesandeid suure täpsusega korrata vähendavad tootmises vigu ja praaki. See viib toote kvaliteedi paranemiseni ja tootmiskulude vähenemiseni.
Need aitavad täpsuse ja korduvuse kaudu kaasa toote kvaliteedi tõstmisele. Suurt täpsust nõudvate ülesannete automatiseerimisega saavad ettevõtted tagada, et tooted vastavad pidevalt kvaliteedistandarditele ja suurendavad klientide rahulolu.
Pideva töö kaudu saavad humanoidrobotid suurendada tootmise efektiivsust ja tootlikkust. Robotid saavad töötada ööpäevaringselt ilma pauside ja väsimuseta, mis toob kaasa suurema tootmismahu ja parema tootmisrajatiste kasutamise.
Humanoidrobotid pakuvad suuremat paindlikkust erinevate tootmisprotsesside vahel vahetamisel. Nende mitmekülgsus ja kohanemisvõime võimaldavad ettevõtetel kiiresti ja lihtsalt erinevate toodete või tootmisliinide vahel vahetada ilma oluliste ümberlülitusaegade või kohandusteta. See suurendab tootmise paindlikkust ja reageerimisvõimet.
Nad saavad aidata kaasa töökohtade loomisele ja säilitamisele, viies inimesi kõrgema kvalifikatsiooniga ametikohtadele. Korduvate ja füüsiliselt nõudlike ülesannete ülevõtmisega võimaldavad humanoidrobotid ettevõtetel oma töötajaid rakendada keerukamates ja lisaväärtust pakkuvates valdkondades, nagu programmeerimine, hooldus, kvaliteedikontroll või protsesside optimeerimine. See võib viia töö parendamise ja suurema töötajate rahuloluni.
Humanoidrobotid aitavad vähendada töötajate voolavust ja värbamisraskusi tootmissektoris. Ebaatraktiivsete ja füüsiliselt nõudlike ülesannete automatiseerimise abil saavad ettevõtted parandada töötingimusi ja suurendada tootmistöökohtade atraktiivsust. See aitab töötajaid ligi meelitada ja hoida ning vähendada värbamis- ja koolituskulusid.
Humanoidrobotid parandavad inimeste töötingimusi, võttes üle ohtlikke või ebameeldivaid ülesandeid. Tootmiskeskkonnad hõlmavad sageli ohtlikke või tervisele kahjulikke ülesandeid, nagu keevitamine, värvimine või kemikaalidega töötamine. Kasutades roboteid nende ülesannete jaoks, saavad ettevõtted kaitsta oma töötajate ohutust ja tervist.
Humanoidrobotid hõlbustavad inimeste ja robotite koostööd, pakkudes otsest tuge tootmises. Robotite integreerimisega töövoogudesse saavad inimesed ja robotid töötada kõrvuti ja üksteist täiendada. Robotid saavad inimesi abistada füüsiliselt nõudlike või korduvate ülesannete täitmisel, samas kui inimesed saavad oma oskusi kasutada sellistes valdkondades nagu probleemide lahendamine, otsuste tegemine ja kvaliteedikontroll.
Logistika spetsiifilised eelised: ohutus, tootlikkus ja klientide rahulolu
Humanoidrobotid pakuvad logistikas ka spetsiifilisi eeliseid, aidates kaasa tõhusamale, ohutumale ja kliendikesksemale kaubaliikumisele.
Humanoidrobotid aitavad logistikakeskkondades ohutust suurendada, vähendades töötajate ohtlikke ülesandeid. Laod ja jaotuskeskused hõlmavad palju ohtlikke tegevusi, näiteks raskete koormate tõstmist, kõrgustes töötamist või kahveltõstukite käsitsemist. Kasutades roboteid nende ülesannete jaoks, saavad ettevõtted oluliselt vähendada oma töötajate vigastuste ohtu.
Need suurendavad logistika tootlikkust, automatiseerides rutiinseid ja korduvaid ülesandeid. Laod ja jaotuskeskused hõlmavad palju korduvaid ülesandeid, nagu tellimuste komplekteerimine, pakkimine, sorteerimine ja kaubaaluste laadimine. Nende ülesannete automatiseerimise abil saavad ettevõtted lühendada oma tarneaegu, vähendada veamäära ja suurendada oma logistikaoperatsioonide üldist võimsust.
Humanoidrobotid pakuvad paremat paindlikkust reageerida logistikanõudluse muutustele. Logistikatööstuses on nõudlus sageli kõikuv, näiteks hooajalised või järskudest tõusudest mõjutatud. Humanoidroboteid saab paindlikult kasutusele võtta ja kiiresti kohandada muutuvatele nõuetele, et tagada reageeriv ja tõhus logistika.
Inimkapitali kasutamist optimeeritakse, rakendades inimesi logistikas strateegilisemate ülesannete täitmiseks. Robotite kasutamisega operatiivülesannete täitmiseks saavad ettevõtted vabastada oma töötajad nõudlikumate ja strateegilisemate rollide jaoks, nagu planeerimine, protsesside optimeerimine, klienditeenindus või juhtimine. See võimaldab inimressursse tõhusamalt kasutada ja suuremat lisaväärtust luua.
Täpsuse ja õigeaegse tarnimise parandamine logistikas parandab klienditeenindust. Humanoidrobotid suudavad ülesandeid täita täpsemalt ja usaldusväärsemalt kui inimesed, mille tulemuseks on vähem vigu tellimuste töötlemisel ja suurem tarnetäpsus. See parandab klientide rahulolu ja tugevdab klientide lojaalsust.
Lisaks võimaldavad humanoidrobotid logistikas paremat varude haldamist. Robotite kasutamisel varude loendamiseks ja haldamiseks saavad ettevõtted oma laoseisudest täpsema ja ajakohasema ülevaate. See võimaldab paremat planeerimist, vähendada ladustamiskulusid ja minimeerida laoseisu.
Humanoidrobotid optimeerivad logistikas saatmis- ja laadimisprotsesse. Selliste ülesannete automatiseerimise abil nagu veoautode või konteinerite laadimine saavad ettevõtted kiirendada oma saatmisprotsesse, lühendada tarneaegu ja parandada logistikaahelate tõhusust.
Humanoidrobotite võime töötada inimestele mõeldud olemasolevates ruumides pakub traditsioonilise automatiseerimise ees märkimisväärset eelist. Ettevõtted saavad vältida kulukaid ja aeganõudvaid infrastruktuuri muudatusi, kiirendades ja vähendades robotite juurutamise kulusid. See muudab humanoidrobotid atraktiivseks valikuks ettevõtetele, kes soovivad oma logistikat ja tootmistoiminguid moderniseerida.
Humanoidrobotite rakendamise väljakutsed: tee laialdase omaksvõtuni
Tehnilised väljakutsed: stabiilsus, taju ja osavus
Kuigi humanoidrobotid, nagu Apollo, on paljulubavad, tekitab nende arendamine ja rakendamine logistikas ja tootmises olulisi tehnilisi väljakutseid.
Üks suurimaid väljakutseid on stabiilse kahejalgse kõnnaku ja dünaamilise tasakaalu saavutamine. Kahel jalal kõndimine on robotite jaoks keeruline ülesanne, mis nõuab täpseid juhtimissüsteeme, keerukaid andureid ja vastupidavat mehaanikat. Tasakaalu säilitamine dünaamilistes keskkondades ja ootamatute häiringute ajal on humanoidrobotite arendajatele pidev väljakutse.
Energiatõhususe ja aku tööea tagamine on veel üks oluline tehniline väljakutse. Humanoidrobotid vajavad oma keerukate liigutuste tegemiseks ning andurite ja arvutisüsteemide käitamiseks palju energiat. Energiatõhusate ajamite, juhtimissüsteemide ja akude väljatöötamine on ülioluline aku tööea pikendamiseks ja humanoidrobotite praktilise kasutamise võimaldamiseks tööstuskeskkonnas.
Tugevate juhtimissüsteemide väljatöötamine on ülioluline, et tagada humanoidrobotite usaldusväärne ja ohutu ülesannete täitmine. Need juhtimissüsteemid peavad suutma planeerida keerulisi liigutusi, reageerida ootamatutele sündmustele ja täpselt juhtida suhtlust keskkonnaga.
Teine väljakutse on roboti abil toimuv taju ehk roboti võime oma keskkonda mõista ja tõlgendada. See hõlmab andurite andmete, näiteks piltide, sügavusteabe ja jõumõõtmiste töötlemist objektide asukoha tuvastamiseks, takistuste vältimiseks ja keskkonna kaardistamiseks. Humanoidrobotite keerukates ja dünaamilistes keskkondades töötamiseks on vaja täiustatud algoritme piltide tuvastamiseks, objektide tuvastamiseks ja keskkonna modelleerimiseks.
Objektide oskuslik manipuleerimine on veel üks oluline tehniline väljakutse. Humanoidrobotid peavad suutma ohutult ja täpselt haarata, liigutada ja manipuleerida väga erinevaid erineva kuju, suuruse ja raskusega objekte. Haaratsite ja käte väljatöötamine, mis jäljendavad inimkäte osavust ja kohanemisvõimet, on robootikas aktiivne uurimisvaldkond.
Reaalajas pildituvastus ja -töötlus on humanoidrobotite kiireks ja tõhusaks reageerimiseks keskkonnamuutustele hädavajalikud. Suure hulga pildiandmete reaalajas töötlemine nõuab võimsaid arvutisüsteeme ja tõhusaid algoritme.
Ennustav mootorijuhtimine kiirete manöövrite jaoks on oluline, et võimaldada humanoidrobotite kiiret ja paindlikku liikumist ning reageerida ootamatutele sündmustele. Juhtimissüsteemide väljatöötamine, mis ennustavad tulevasi liikumisi, on humanoidrobotite jõudluse ja ohutuse tagamiseks dünaamilistes töökeskkondades ülioluline. Kujutage ette robotit, mis transpordib kaubaalust lao vahekäigus, kui kahveltõstuk ootamatult nurga tagant välja pöörab. Ennustav juhtimissüsteem võimaldaks robotil olukorda kiiresti hinnata, oma kurssi korrigeerida ja kokkupõrget vältida ilma tasakaalu kaotamata või kaubaalust maha pillamata.
Kinemaatilise redundantsuse haldamine on veel üks tehniline väljakutse. Humanoidrobotite liigestes on palju vabadusastmeid, mis annab neile küll suure paindlikkuse, kuid muudab juhtimise ka keerukamaks. Kinemaatiline redundantsus tähendab, et robotkäe või kogu süsteemi liigutamiseks on sageli mitu võimalust konkreetse eesmärgi saavutamiseks. Juhtimissüsteemid peavad suutma valida nende paljude võimaluste hulgast optimaalse lahenduse, et tagada tõhusad ja sujuvad liikumised. See nõuab keerukaid algoritme, mis võtavad arvesse selliseid tegureid nagu energiatarbimine, liigeste piirangud ja takistuste vältimine.
Efektorpea trajektoori planeerimine on täpsete manipuleerimisülesannete puhul ülioluline. Efektorpea on robotkäe otsas asuv tööriist, näiteks haarats või keevituspõleti. Trajektoori planeerimine käsitleb seda, kuidas efektorpea saab optimaalsel trajektooril liigutada konkreetse ülesande täitmiseks, näiteks objekti ülesvõtmiseks või asetamiseks või keevisõmbluse moodustamiseks. See nõuab selliste tegurite arvessevõtmist nagu kiirus, kiirendus, kokkupõrke vältimine ja täpsus. Keeruliste ülesannete puhul, näiteks tundlike komponentide kokkupanekul, on väga täpne trajektoori planeerimine hädavajalik.
Lõpuks kujutab kulumise ennustamine pikaealisuse ja töökindluse tagamiseks endast pikaajalist inseneritöö väljakutset. Tööstusrobotid peavad suutma usaldusväärselt töötada pikka aega, sageli ka nõudlikes tingimustes. Komponentide, näiteks ajamite, liigeste ja andurite kulumise ennustamine on ülioluline hooldusintervallide planeerimiseks, seisakuaja minimeerimiseks ja roboti eluea maksimeerimiseks. Täiustatud andureid ja seisundi jälgimise algoritme saab kasutada roboti komponentide seisundi jälgimiseks reaalajas ja kulumise varajaste märkide tuvastamiseks.
Sellega seotud:

Integratsiooniprobleemid: sujuv integreerimine olemasolevatesse süsteemidesse
Humanoidrobotite integreerimine olemasolevatesse laohaldussüsteemidesse (WMS) ja teistesse automatiseerimistehnoloogiatesse on keeruline väljakutse. Laohaldussüsteemid on tänapäevaste ladude selgroog, hallates kõiki laotegevuse aspekte alates varude haldamisest ja tellimuste täitmisest kuni saatmiseni. Humanoidrobotite tõhusaks kasutamiseks on hädavajalik sujuv andmevahetus ja koordineerimine robotite ja WMS-i vahel. Robotid peavad saama reaalajas teavet tellimuste, ladustamiskohtade, varude andmete ja marsruutide kohta ning edastama oma edenemise ja ülesannete staatuse WMS-ile. Roboti liideste ja WMS-süsteemide ühilduvusprobleemid võivad põhjustada viivitusi, andmete kadu ja suurenenud integreerimiskulusid. Standardiseeritud liideste ja sideprotokollide väljatöötamine on ülioluline, et lihtsustada humanoidrobotite integreerimist olemasolevatesse logistikainfrastruktuuridesse.
Tootmisüksustes on ühilduvus olemasolevate masinate ja tarkvaraga sama oluline. Kaasaegsed tehased on sageli väga automatiseeritud ja kasutavad mitmesuguseid masinaid, juhtimissüsteeme ja tarkvararakendusi. Humanoidrobotid peavad suutma nende süsteemidega sujuvalt suhelda, et neid saaks tõhusalt tootmisprotsessi integreerida. Vanematel seadmetel võivad puududa vajalikud liidesed või sideprotokollid täiustatud robotitega töötamiseks. See võib vajada olemasolevate masinate ja süsteemide moderniseerimist või täiustamist, mis võib kaasa tuua lisakulusid ja -pingutusi. Vanemate masinate moderniseerimislahenduste ja standardiseeritud liideste väljatöötamine on ülioluline, et hõlbustada humanoidrobotite integreerimist olemasolevatesse tootmiskeskkondadesse.
Lisaks tehnilisele integreerimisele olemasolevatesse süsteemidesse on vajalikud ka organisatsioonilised ja protseduurilised kohandused. Humanoidrobotite kasutuselevõtt võib muuta olemasolevaid töövooge ja vastutust. Ettevõtted peavad analüüsima oma protsesse, et teha kindlaks robotite optimaalsed rakendusvaldkonnad ja kohandada töövooge vastavalt. See võib hõlmata töökohtade ümberkujundamist, töötajate koolitamist robotitega töötamiseks ja juhtimisstruktuuride kohandamist. Integratsiooni hoolikas planeerimine ja ettevalmistamine on ülioluline, et tagada sujuv üleminek ja humanoidrobotite edukas juurutamine.
Majanduslikud ja logistilised väljakutsed: kulud, investeeringutasuvus ja skaleeritavus
Kõrged arendus- ja rakenduskulud kujutavad endast märkimisväärset majanduslikku väljakutset humanoidrobotite laialdasele aktsepteerimisele. Selliste keerukate humanoidrobotite nagu Apollo väljatöötamine nõuab märkimisväärseid investeeringuid teadus- ja arendustegevusse, disaini, materjalide hankimisse ja tootmisse. Esialgne investeering humanoidrobotisse võib olla paljudele ettevõtetele, eriti väikestele ja keskmise suurusega ettevõtetele (VKEdele), oluliseks sisenemistõkkeks. Humanoidrobotite majandusliku atraktiivsuse suurendamiseks on vaja täiendavaid tehnoloogilisi edusamme, mis tooksid kaasa kulude vähenemise arenduses ja tootmises.
Seetõttu on enne humanoidrobotitesse investeerimist ettevõtetel ülioluline teha põhjalik kulude-tulude analüüs ja investeeringutasuvuse (ROI) arvutus. Ettevõtted peavad hoolikalt kaaluma soetuskulusid, tegevuskulusid (nt energiatarbimine, hooldus, koolitus), potentsiaalset kokkuhoidu (nt tööjõukulud, suurenenud efektiivsus, vigade ja vigastuste vähenemine) ning pikaajalist kasu (nt suurem paindlikkus, parem konkurentsivõime). Humanoidrobotite investeeringutasuvus (ROI) võib varieeruda sõltuvalt kasutusjuhtumist, tööstusharust ja ettevõtte suurusest. Ettevõtted peavad tuvastama konkreetsed kasutusjuhud, kus humanoidrobotite kasutuselevõtt pakub selget majanduslikku eelist ja võib eeldada positiivset investeeringutasuvust.
Keerulised programmeerimisnõuded ja vajadus koolitatud personali järele kujutavad endast täiendavat majanduslikku ja logistilist väljakutset. Humanoidrobotid on väga keerukad masinad, mille seadistamiseks, kasutamiseks, hooldamiseks ja tõrkeotsinguks on vaja spetsiaalseid programmeerimisoskusi ja -teadmisi. Ettevõtted peavad kas investeerima oma olemasoleva personali koolitamisse või palkama uusi spetsialiste vajalike oskustega. Kvalifitseeritud personali kättesaadavus, eriti robootika, tehisintellekti ja automatiseerimise valdkonnas, on paljudes piirkondades piiratud. Ettevõtted võivad vajada investeeringuid atraktiivsetesse töötingimustesse ja koolitusprogrammidesse, et kvalifitseeritud töötajaid ligi meelitada ja hoida.
Humanoidrobotite tootmise ja juurutamise skaleeritavus on veel üks oluline logistiline väljakutse. Keerukate humanoidrobotite masstootmine taskukohase hinnaga nõuab tarneahelate ja tootmisprotsesside olulist optimeerimist. Komplekssete robotikomponentide tootmine, kokkupanek ja kvaliteedikontroll suurtes kogustes kujutavad endast märkimisväärseid logistilisi väljakutseid. Ettevõtted peavad investeerima tõhusatesse tootmisrajatistesse, automatiseeritud tootmisprotsessidesse ja tugevatesse tarneahelatesse, et võimaldada humanoidrobotite masstootmist ja vähendada kulusid. Samuti tuleb lahendada humanoidrobotite globaalse juurutamise logistiline väljakutse, sealhulgas transport, paigaldus, hooldus ja tugi.
Sotsiaalsed ja eetilised kaalutlused: aktsepteerimine, töökoha kaotus ja vastutus
Töötajate aktsepteerimine ja töökoha kaotuse hirmust tulenev potentsiaalne vastuseis on humanoidrobotite kasutuselevõtul olulised sotsiaalsed kaalutlused. Robotite poolt ülesannete automatiseerimine võib tekitada töökoha kaotuse hirmu ja ebakindlust töötajate professionaalse tuleviku suhtes. Oluline on neid hirme tõsiselt võtta ning suhelda töötajatega avatult ja läbipaistvalt robotite rollist töökohal. Selge suhtlus robotite rolli kohta kaastöötajatena, mitte lihtsalt asendajatena, on ülimalt oluline. Tuleks rõhutada, et robotid toetavad ja leevendavad inimtöötajaid, võttes üle korduvaid, füüsiliselt nõudlikke ja ohtlikke ülesandeid, võimaldades inimestel keskenduda keerukamatele ja väärtust lisavatele tegevustele.
Samuti on ülioluline hallata tööjõu üleminekut ümberõppe ja täiendõppe programmide kaudu. Robotite kasutuselevõtt toob kaasa muutusi töökohtade nõuetes ja vajalikes kvalifikatsioonides. Ettevõtted peavad investeerima ümberõppe ja täiendõppe programmidesse, et valmistada oma töötajaid ette uuteks nõudmisteks ning avada uusi perspektiive ja karjäärivõimalusi. Nende programmide eesmärk peaks olema varustada töötajaid uute oskustega sellistes valdkondades nagu robootika, automatiseerimine, programmeerimine, hooldus ja andmeanalüüs. Selle muutuse aktiivse kujundamise ja töötajate arendamisse investeerimisega saavad ettevõtted suurendada robotite aktsepteerimist ja tagada, et automatiseerimistehnoloogiate kasutuselevõtt muutuks kõigile sidusrühmadele kasulikuks olukorraks.
Robotite tegevuse eetilised juhised ja vastutus tuleb kehtestada, kuna robotite suurenev autonoomia nõuab nende käitumise eetilisi raamistikke. Kuna robotid langetavad üha enam iseseisvaid otsuseid ja sooritavad toiminguid, kerkib üles eetilise vastutuse ja vastutuse küsimus oma tegevuse eest. Humanoidrobotite arendamiseks, juurutamiseks ja nendega suhtlemiseks tuleb kehtestada selged eetilised juhised ja standardid. Need juhised peaksid käsitlema selliseid aspekte nagu ohutus, andmekaitse, õiglus, läbipaistvus ja vastutus. On ülioluline algatada ühiskondlik diskursus robootika eetiliste tagajärgede üle ja jõuda konsensusele nende tehnoloogiate kasutamise eetiliste raamistike osas.
Laoülesannete varieeruvus on ainulaadne väljakutse, kuna humanoidrobotid vajavad täiustatud tehisintellekti ja kohanemisvõimelisi füüsilisi võimeid, et käsitleda laia valikut esemeid ja olukordi. Erinevalt tootmiskeskkondadest, mida sageli iseloomustavad standardiseeritud protsessid ja tooted, on laokeskkond tavaliselt dünaamilisem ja mitmekesisem. Laotöötajad peavad käsitlema laia valikut erineva kuju, suuruse, kaalu ja pakendiga esemeid. Humanoidrobotid peavad suutma selle varieeruvusega kohaneda ja erinevatele olukordadele paindlikult reageerida. See nõuab täiustatud tehisintellekti algoritme objektide tuvastamiseks, haarava liikumise planeerimiseks ja adaptiivseid juhtimissüsteeme, mis võimaldavad robotil käsitleda isegi tundmatuid või ootamatuid esemeid ja olukordi. Tugevate ja mitmekülgsete võimete arendamine ülesannete täitmiseks muutuvates keskkondades on humanoidrobotite laialdase kasutuselevõtu peamine väljakutse logistikas.
Konkurentsianalüüs: Apollo võrreldes konkurentidega
Peamised konkurendid: Kasvav turg tugevate tegijatega
Tööstuslikeks rakendusteks mõeldud humanoidrobotite turg muutub üha konkurentsitihedamaks ja dünaamilisemaks. Üha rohkem ettevõtteid tunneb ära selle tehnoloogia potentsiaali ning investeerib humanoidrobotite uurimis- ja arendustegevusse ning turuletoomisse. Apptroniku peamiste konkurentide hulka kuuluvad mõned tuntumad ja innovaatilisemad ettevõtted robootika ja tehnoloogia valdkonnas.
Elon Muski juhitav Tesla on oma Optimuse robotiga humanoidrobotite valdkonnas peamine konkurent. Tesla on tuntud oma teadmiste poolest elektrilise mobiilsuse, akutehnoloogia, tehisintellekti ja autonoomse sõidu alal. Optimuse robot saab kasu Tesla ulatuslikest ressurssidest ja oskusteabest nendes valdkondades. Tesla positsioneerib Optimust mitmekülgse humanoidrobotina laiaulatuslikuks kasutamiseks, sealhulgas tootmises, logistikas ja kodustes ülesannetes. Tesla rõhutab eriti Optimuse energiatõhusust ja sobivust tootmiseks.
Figure AI on järjekordne tärkav ettevõte humanoidrobotite valdkonnas, mis pälvib tähelepanu oma Figure 01 ja Figure 02 mudelitega. Figure AI keskendub humanoidrobotite arendamisele, millel on täiustatud tehisintellekt ja inimlaadne osavus. Ettevõte paneb suurt rõhku oma robotite võimele täita keerulisi ülesandeid inimkeskses keskkonnas. Figure AI on teatanud partnerlussuhetest selliste ettevõtetega nagu BMW, et testida oma roboteid autotööstuses.
Agility Robotics on ettevõte, mis on spetsialiseerunud humanoidrobotite arendamisele logistika- ja laondusrakenduste jaoks. Nende robot Digit on spetsiaalselt optimeeritud kasutamiseks ladudes ja jaotuskeskustes. Digit on loodud automatiseerima selliseid ülesandeid nagu veoautode laadimine ja mahalaadimine, tellimuste komplekteerimine ja materjalide transport laos. Agility Robotics rõhutab Digiti liikuvust, vastupidavust ja hõlpsat integreerimist olemasolevatesse logistikaprotsessidesse.
Boston Dynamics, mis on tuntud oma muljetavaldavate ja dünaamiliste robotite nagu Atlas ja SpotMini poolest, on ka humanoidrobotite valdkonnas oluline tegija. Ajalooliselt on Boston Dynamics peamiselt arendanud uurimis- ja demonstratsiooniroboteid, mis nihutavad robootika võimaluste piire. Atlas on kõrgelt arenenud humanoidrobot, mis on võimeline sooritama keerukaid liigutusi, ületama takistusi ja töötama keerulistes keskkondades. SpotMini on väiksem neljajalgne robot, mida iseloomustab oma väledus ja mitmekülgsus. Kuigi Boston Dynamics ei ole seni peamiselt tööstuslikele rakendustele keskendunud, võivad selle tehnoloogiad ja oskusteave tulevikus selles valdkonnas olulist rolli mängida.
1X Technologies on oma robotitega EVE ja NEO veel üks ettevõte, mis teeb edusamme humanoidrobotite valdkonnas. 1X Technologies keskendub humanoidrobotite arendamisele kodudes ja tervishoiuasutustes, aga ka tööstuslikes rakendustes kasutamiseks. EVE on humanoidrobot, mis on loodud hõlpsaks kasutamiseks ja inimestega suhtlemiseks. NEO on edasijõudnum humanoidrobot, mis on välja töötatud nõudlikumate ülesannete ja keskkondade jaoks.
Sanctuary AI oma robotiga Phoenix on veel üks ettevõte, mis keskendub üldiste humanoidrobotite arendamisele. Sanctuary AI läheneb tehisintellektile keskendunult ja arendab täiustatud tehisintellekti platvormi nimega Carbon, mis on loodud selleks, et Phoenix saaks õppida ja täita laia valikut ülesandeid. Sanctuary AI rõhutab Phoenixi võimet toetada ja täiendada inimtööd erinevates tööstusharudes.
Unitree Robotics on oma humanoidrobotiga H1 Hiina ettevõte, mis on kiiresti saanud robootika valdkonnas oluliseks tegijaks. Unitree on tuntud oma taskukohaste ja võimsate robotkäte ning neljajalgsete robotite poolest. H1 on Unitree esimene humanoidrobot ja selle eesmärk on olla konkurentsivõimeline nii jõudluse kui ka hinna poolest.
Neura Robotics on oma 4NE-1 robotiga Saksa ettevõte, mis on spetsialiseerunud koostöö- ja humanoidrobotitele. 4NE-1 on humanoidrobot, mis on loodud kasutamiseks erinevates tööstusharudes, sealhulgas tootmises, logistikas ja teeninduses. Neura Robotics rõhutab 4NE-1 ohutust, kasutajasõbralikkust ja paindlikkust.
Apollo konkurentsieelised: tugevus, modulaarsus ja ohutus
Apollo positsioneerib end sellel väga konkurentsitihedal turul oma ainulaadsete tehniliste omaduste ja strateegilise fookuse abil. Võrreldes mõnede konkurentidega, nagu Figure 01 ja Tesla Optimus, pakub Apollo suuremat kandevõimet. 25 kg (ja potentsiaalselt kuni 29 kg) kandevõimega suudab Apollo käsitseda raskemaid koormaid kui mõned tema konkurendid, muutes selle atraktiivsemaks teatud logistika- ja tootmisrakenduste jaoks, kus raskete esemete tõstmine ja teisaldamine on ülioluline.
Apollo modulaarsus on veel üks oluline konkurentsieelis. Modulaarne disain võimaldab Apollot kohandada erinevate ülesannete ja keskkondadega, asendades aluse (jalad, rattad, alus) ja potentsiaalselt ka teisi komponente. See paindlikkus suurendab Apollo potentsiaalset rakendusala ja maksimeerib ettevõtete investeeringutasuvust.
Apollo ainulaadne jõujuhtimise arhitektuur tagab inimese ja roboti ohutu interaktsiooni. See funktsioon on ülioluline humanoidrobotite juurutamiseks inimkesksetes töökeskkondades, kus töötajate ohutus on esmatähtis. Jõujuhtimine võimaldab Apollol töötada koos inimestega ilma keerukate ohutusseadmeteta.
Lineaarsete ajamite kasutamine pöördajamite asemel võib anda Apollole potentsiaalselt eeliseid kulude, lihtsuse ja töökindluse osas. See uuenduslik lähenemine ajamitehnoloogiale eristab Apollot paljudest konkurentidest ja võib viia madalamate tootmiskuludeni, lihtsama hoolduseni ja suurema töökindluseni.
Oluliste humanoidrobotite võrdlus tööstuslike rakenduste jaoks
Tööstuslike rakenduste jaoks mõeldud peamiste humanoidrobotite võrdlus näitab olulisi erinevusi Apptronik Apollo, Tesla Optimuse, Figure AI (joonis 01) ja Agility Robotics Digiti mudelite vahel. Robotite kõrgus on 1,68 m (joonis AI) kuni 1,75 m (Agility Robotics), samas kui nende kaal varieerub 60 kg (joonis AI) ja 73 kg (Tesla Optimus) vahel. Mis puutub kandevõimesse, siis Apollol on suurim kandevõime, 25 kg, samas kui teised mudelid suudavad igaüks kanda 20 kg. Aku tööiga varieerub 3 tunnist (Digit) kuni 5 tunnini (joonis AI), kuigi Tesla Optimus ei anna selle kohta täpset teavet. Erinevat tüüpi ajamitel, näiteks Apollo lineaarajamitel ja Figure AI ning Digiti elektriajamitel, on erinevad tehnilised lähenemisviisid. Ka strateegilised prioriteedid on väga erinevad: Apollo keskendub modulaarsusele ja jõu juhtimisele, Tesla Optimus seab esikohale energiatõhususe ja tootmise, Figure AI rõhutab inimese osavust ja tehisintellekti integreerimist, samas kui Digit on spetsiaalselt optimeeritud logistikarakenduste jaoks. Need strateegilised erinevused kajastuvad ka sihtrakendustes: Apollo on mõeldud peamiselt logistika ja tootmise jaoks, samas kui Tesla Optimus on suunatud tootmisele ja ladustamisele. Figure AI ühendab tööstusrakendused ladustamisega ning Digit keskendub samuti logistikale ja ladustamisele. Üldiselt rõhutab võrdlus, et humanoidrobotite arendamist tööstuslikeks rakendusteks juhivad mitmekesised prioriteedid – alates jõust ja modulaarsusest kuni osavuse, energiatõhususe ja konkreetsete rakendusvaldkondadeni.
Ekspertarvamused ja analüütikute vaatenurgad Apollo kohta: paljutõotav tehnoloogia seisab silmitsi oma võimete proovilepanekuga
Eksperdid ja analüütikud peavad Apollot oluliseks edasiminekuks uuendusliku tehnoloogia vallas, mis on loodud kohanemisvõimet ja kasutajasõbralikkust silmas pidades. Apollot tajutakse robotina, millel on potentsiaal humanoidrobotite võimekust praktikas ümber defineerida. Eksperdid peavad Apollot hästi sobivaks korduvate ja füüsiliselt nõudlike ülesannete jaoks ning tunnustavad selle potentsiaali tööjõupuuduse lahendamiseks erinevates tööstusharudes. Kasutajasõbralikku tarkvara ja ilmekaid LED-ekraane esile tõstetakse positiivsete omadustena, mis võimaldavad intuitiivset kasutamist ja hõlbustavad inimese ja roboti vahelist suhtlust.
Ekspertide arvates on Apollo integreerimine NVIDIA projektiga GR00T, mis on universaalrobotite arendamise platvorm, märkimisväärne samm roboti tehisintellekti võimete parandamise suunas. Koostöö juhtiva tehisintellekti ettevõttega Google DeepMind eesmärk on edasi arendada tehisintellekti üldotstarbeliste humanoidide jaoks ning muuta Apollo tulevikus veelgi intelligentsemaks ja mitmekülgsemaks.
Apptroniku võtmepartner Mercedes-Benz näeb Apollos tootmistööstuse jaoks transformatiivset potentsiaali. Asjaolu, et selline tuntud autotootja nagu Mercedes-Benz investeerib Apollosse ja testib seda oma tootmisüksustes, on selle tehnoloogia potentsiaali tugev näitaja. Eksperdid rõhutavad ka Apptroniku keskendumist reaalsetes keskkondades rakendamisele kapitalitõhususe abil kui ainulaadset ja paljutõotavat lähenemist. Lähenemisviis, mis seisneb humanoidrobotite arendamises olemasolevates töökeskkondades kasutamiseks ilma olulisi infrastruktuuri muudatusi nõudmata, on Apollo praktilise rakendatavuse ja majandusliku tasuvuse võtmeteguriks.
Siiski on Apollo ja humanoidrobotite osas üldiselt ka muresid ja skepsist. Mõned eksperdid väljendavad muret humanoidrobotite töökindluse pärast nõudlikes tööstuskeskkondades. Humanoidrobotite keeruline mehaanika, täiustatud juhtimissüsteemid ja keerukad andurid võivad muuta need riketele vastuvõtlikumaks ja vajavad rohkem hooldust kui lihtsamad, spetsialiseeritud robotid. Võimalikke kulutõkkeid peetakse ka laialdase kasutuselevõtu takistuseks. Kuigi robootika ja automatiseerimise kulud on viimastel aastatel langenud, on humanoidrobotid endiselt suhteliselt kallis tehnoloogia. Eksperdid rõhutavad, et humanoidrobotite maksumus peaks oluliselt langema, et need muutuksid majanduslikult elujõuliseks ja atraktiivseks laiale ettevõtete ringile.
Samuti on humanoidrobotite praktilisuse ja tasuvuse osas teatud rakendusvaldkondades laialt levinud skeptitsism. Mõned eksperdid väidavad, et spetsialiseeritud robotid või muud automatiseerimislahendused võivad paljudel juhtudel olla humanoidrobotidest tõhusamad, kulutõhusamad ja usaldusväärsemad. Küsimus, kas humanoidrobotid suudavad tegelikult neile seatud ootusi täita ja investeeringult selget tulu pakkuda, jääb paljudele ekspertidele lahtiseks.
Üldiselt tunnustavad eksperdid Apollo tehnoloogilisi saavutusi ja näevad seda paljulubava lähenemisviisina tööstusautomaatikale. Samal ajal rõhutavad nad aga vajadust demonstreerida selle praktilisust, töökindlust ja kulutõhusust reaalsetes tööstuskeskkondades. Apollo edu sõltub oluliselt selle võimest töötada usaldusväärselt, pakkuda oodatavat jõudlust ja pakkuda ettevõtetele selget investeeringutasuvust. Käimasolevad pilootprogrammid ja partnerlussuhted selliste ettevõtetega nagu Mercedes-Benz ja GXO Logistics on selle testi läbimiseks ja humanoidrobotite vastu tööstuse usalduse võitmiseks üliolulised.
Humanoidrobotite turupotentsiaal ja tulevikuväljavaated tööstuses: miljardi dollari suurune turg on tekkimas
Turu kogupotentsiaal: Oodatakse eksponentsiaalset kasvu
Humanoidrobotite ülemaailmne turg on tohutu potentsiaaliga ja prognooside kohaselt ulatub selle väärtus 2035. aastaks 38 miljardi USA dollarini. See muljetavaldav prognoos rõhutab selle turu eeldatavat eksponentsiaalset kasvu lähiaastatel. Selle kasvu peamised liikumapanevad tegurid on tehisintellekti (AI) ja autonoomsete süsteemide pidev areng, mis muudab humanoidrobotid üha intelligentsemaks, mitmekülgsemaks ja võimekamaks. Turu kasvu oluliseks panuseks on ka kasvav nõudlus automatiseerimislahenduste järele paljudes tööstusharudes, sealhulgas tootmises, logistikas, tervishoius ja isikliku abistamise valdkonnas.
Apptroniku strateegiline positsioneerimine: Keskendutakse logistikale ja tootmisele
Apptronik on end strateegiliselt positsioneerinud, et sellest kasvavast turust kasu lõigata. Ettevõte keskendub algselt logistikale ja tootmisele kui oma Apollo roboti peamistele sihtturgudele. Need tööstusharud seisavad silmitsi oluliste väljakutsetega, nagu tööjõupuudus, suurenev kulusurve ning vajadus suurema efektiivsuse ja paindlikkuse järele. Apollo pakub paljutõotavat lahendust, automatiseerides korduvaid, füüsiliselt nõudlikke ja ebameeldivaid ülesandeid, võimaldades samal ajal inimese ja masina koostööd.
Apptronik paneb suurt rõhku ohutusele ja inimese ja roboti koostööle. See kajastub Apollo disainis ja tehnilistes omadustes, nagu jõujuhtimise arhitektuur ja intuitiivsed suhtlusvõimalused. Ettevõte on loonud strateegilised partnerlussuhted valdkonna juhtivate ettevõtetega nagu Mercedes-Benz, GXO Logistics ja Jabil, aga ka tehnoloogiapakkujatega nagu Google ja NVIDIA. Need partnerlused on üliolulised tehnoloogia valideerimiseks, uutele turgudele sisenemiseks ja Apollo turuletoomise kiirendamiseks. Apptronik keskendub ka kapitalitõhususele ja reaalsele rakendamisele. Ettevõte läheneb asjale pragmaatiliselt, keskendudes kasutusjuhtudele, kus Apollo pakub selget majanduslikku eelist ja mida saab integreerida olemasolevatesse töökeskkondadesse ilma olulisi infrastruktuuri uuendusi nõudmata.
Laienemine uutesse sektoritesse ja robotitesse, mis ehitavad roboteid
Humanoidrobotite kasutamise eeldatavasti laieneb tulevikus ka teistesse sektoritesse, näiteks eakate hooldusse, katastroofiabisse ja tervishoidu. Eakate hoolduses saavad humanoidrobotid toetada eakaid inimesi nende igapäevaelus, pakkuda seltsi ja kutsuda vajadusel abi. Katastroofiabis saab roboteid kasutada ohtlikes keskkondades otsingu- ja päästeoperatsioonide läbiviimiseks, prahi koristamiseks ja abivahendite jagamiseks. Tervishoius saavad humanoidrobotid abistada meditsiinipersonali selliste ülesannete täitmisel nagu patsientide hooldus, ravimite manustamine ja kirurgilised protseduurid.
Humanoidrobotitel on tulevikus potentsiaali saada usaldusväärseteks töötajateks, kes teevad sujuvat koostööd inimestega ja mängivad olulist rolli paljudes eluvaldkondades. Apptroniku ja Jabili nägemus robotitest, mis ehitavad teisi roboteid, on põnev väljavaade robootika pikaajalisse arengusse. Kui humanoidrobotid on võimelised ennast paljundama ja oma tootmisprotsesse automatiseerima, võib see kaasa tuua robootika arengu tohutu kiirenemise ja kulude edasise vähenemise.
Apptroniku saadud märkimisväärne rahastus ja võtmetähtsusega tööstusettevõtete kaasamine näitavad tugevat usku humanoidrobotite, näiteks Apollo, turupotentsiaali. Need investeeringud soodustavad edasist arendus-, tootmis- ja juurutamispüüdlusi, aidates kaasa humanoidrobotite üha olulisema rolli mängimisele tööstuses ja ühiskonnas tulevikus.
Apollo – paljulubav teerajaja humanoidrobotites
Apptroniku Apollo robot on väga paljutõotav lahendus logistika ja tootmise automatiseerimiseks. Selle peamised tugevused seisnevad humanoidses disainis, mis võimaldab sujuvat integreerumist olemasolevatesse töökeskkondadesse; suures kandevõimes, mis võimaldab seda täita laia valikut ülesandeid; modulaarses disainis, mis pakub paindlikkust ja kohanemisvõimet; ning täiustatud ohutusfunktsioonides, mis tagavad ohutu koostöö inimestest töötajatega. Strateegilised partnerlused selliste valdkonna juhtivate ettevõtetega nagu Mercedes-Benz ja GXO Logistics rõhutavad kasvavat usku humanoidrobotite potentsiaali, et lahendada kasvavat tööjõupuudust ja suurendada tõhusust nendes võtmetööstuses.
Vaatamata neile paljulubavatele väljavaadetele tuleb humanoidrobotite, näiteks Apollo, laialdase aktsepteerimise saavutamiseks lahendada mitmeid väljakutseid. Nende hulka kuuluvad eelkõige praeguste kõrgete rakenduskulude vähendamine, olemasolevatesse keerukatesse süsteemidesse integreerimise edasine lihtsustamine ning pikaajalise töökindluse ja kulutõhususe veenev demonstreerimine nõudlikes tööstuskeskkondades. Robotite kasutuselevõtu sotsiaalsed ja eetilised tagajärjed, eriti seoses töökoha turvalisuse ja töötajate aktsepteerimisega, nõuavad samuti hoolikat ja vastutustundlikku kaalumist ja kavandamist.
Apptronik oma Apollo robotiga võiks kahtlemata mängida olulist rolli tööstusautomaatika kujunevas tulevikus. Selle ainulaadsed tehnilised omadused koos strateegilise keskendumisega reaalsetele praktilistele rakendustele ja tugevatele partnerlussuhetele annavad ettevõttele optimaalse positsiooni, et saada jätkusuutlikku kasu dünaamiliselt kasvavast humanoidrobotite turust. Ettevõtted, kes kaaluvad humanoidrobotite kasutuselevõttu, peaksid strateegiliselt keskenduma konkreetsetele, selgelt määratletud kasutusjuhtudele, viima läbi põhjalikke ja laiaulatuslikke pilootprogramme ning investeerima oma töötajate koolitamisse ja arendamisse, et tagada selle täiustatud ja murrangulise tehnoloogia edukas ja sujuv integreerimine. Apollo on valmis mitte ainult muutma töömaailma, vaid ka juhatama sisse uue ajastu inimese ja roboti koostöös, kus masinad ja inimesed saavad ühiselt oma täielikku potentsiaali realiseerida.
Oleme teie jaoks olemas - Konsultatsioon - Planeerimine - Teostus - Projektijuhtimine
☑️ VKEde tugi strateegia, konsultatsioonide, planeerimise ja rakendamise alal
☑️ Digitaalse strateegia loomine või ümberkorraldamine ja digitaliseerimine
☑️ Rahvusvaheliste müügiprotsesside laiendamine ja optimeerimine
☑️ Globaalsed ja digitaalsed B2B kauplemisplatvormid
☑️ Pioneer Äriarendus

Konrad Wolfenstein
Mul oleks hea meel olla teie isiklik nõustaja.
Võite minuga ühendust võtta, täites alloleva kontaktvormi või helistades mulle numbril +49 7348 4088 965 .
Ootan põnevusega meie ühist projekti.
Kirjuta mulle



Xpert.Digital - Konrad Wolfenstein
Xpert.Digital on tööstuskeskus, mis keskendub digitaliseerimisele, masinaehitusele, logistikale/siselogistikale ja fotogalvaanikale.
Meie 360° äriarenduslahendusega toetame tuntud ettevõtteid alates uutest klientidest kuni järelmüügini.
Turu-uuring, s-turundus, turunduse automatiseerimine, sisu loomine, suhtekorraldus, meilikampaaniad, personaalne sotsiaalmeedia ja müügivihjete haldamine on osa meie digitaalsetest tööriistadest.
Lisateavet leiate aadressilt: www.xpert.digital - www.xpert.solar - www.xpert.plus
Hoidke ühendust