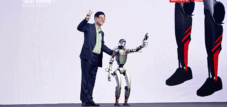
El sistema TWIST: La tecnología de captura de movimiento (MoCap) revoluciona el control de robots humanoides – Imagen: Xpert.Digital
Sistema de imitación de cuerpo entero teleoperado: la interacción humano-robot en tiempo real cambiará la robótica.
Movimientos humanos para robots: El potencial del sistema TWIST
Los científicos han logrado un avance significativo en el desarrollo de sistemas de teleoperación para robots humanoides. Mediante el uso de tecnología de captura de movimiento, los robots humanoides ahora pueden realizar movimientos similares a los humanos en tiempo real. Esta innovación permite un control preciso e intuitivo de los robots, lo que representa un paso importante hacia el desarrollo de robots con destreza corporal completa. Cabe destacar el nuevo sistema TWIST (Sistema Teleoperado de Imitación de Cuerpo Completo), que transmite los movimientos corporales completos de una persona a un robot, marcando así el comienzo de una nueva era en la interacción entre humanos y robots.
Relacionado con esto:


Los fundamentos de la teleoperación basada en captura de movimiento
La teleoperación se refiere al control remoto de máquinas y es de particular importancia en el campo de la robótica. Los sistemas telerrobóticos se utilizan cuando el espacio de trabajo es demasiado lejano, pequeño, grande o peligroso para las personas. La disociación espacial entre el operador humano y el robot (teleoperador) permite aplicaciones en diversos campos, como la cirugía mínimamente invasiva, la desactivación de bombas y las aplicaciones espaciales.
La tecnología de captura de movimiento (MoCap) constituye la base de los sistemas modernos de teleoperación. Esta tecnología permite grabaciones y simulaciones detalladas del movimiento humano, lo que permite la digitalización de individuos o grupos enteros. Los movimientos capturados se procesan inteligentemente y pueden utilizarse para animar cuerpos y sus movimientos.
Cómo funciona la tecnología de captura de movimiento
La tecnología de captura de movimiento rastrea y registra con precisión los movimientos corporales de personas reales mediante un traje especial equipado con marcadores y sistemas ópticos. Este proceso recopila datos de movimiento de todas las partes del cuerpo: no solo de brazos, manos, piernas y pies, sino también del torso, las caderas y la cabeza. Estos datos exhaustivos se transforman en comandos que los robots humanoides pueden ejecutar mediante inteligencia artificial (IA).
El sistema TWIST: un gran avance en la teleoperación robótica
El sistema TWIST, desarrollado en la Universidad de Stanford y la Universidad Simon Fraser, representa un avance significativo en la teleoperación de robots humanoides. Combina la tecnología de captura de movimiento con métodos de aprendizaje por refuerzo y aprendizaje por imitación.
«Queremos que los humanoides posean el mismo nivel de destreza corporal que los humanos», explica Yanjie Ze, autor principal del estudio TWIST. «Imaginen una cocina desordenada. Los humanos pueden sujetar objetos con ambas manos y usar los pies para mover obstáculos, como una cesta en el suelo. También pueden abrir la puerta con los costados o los codos. Queremos que los humanoides puedan hacer lo mismo imitando directamente a los humanos»
Implementación técnica de TWIST
El sistema TWIST consta de tres componentes esenciales:
- Adquisición de datos y redireccionamiento: Mediante el redireccionamiento en línea y fuera de línea, los movimientos humanos se adaptan al robot. Esto se logra mediante la transmisión optimizada de las posiciones y orientaciones articulares en 3D, y la orientación del cuerpo y la colocación de los pies también se ajustan en tiempo real.
- Entrenamiento de controladores en simulación: TWIST utiliza un enfoque de dos etapas con una metodología de "maestro-alumno":
- El controlador "Profesor" tiene acceso privilegiado a los movimientos de referencia futuros, lo que le permite planificar movimientos más fluidos.
- El controlador "estudiante" se entrena mediante una combinación de aprendizaje por refuerzo (RL) y clonación de comportamiento (BC) y solo puede acceder a la información de movimiento actual.
- Controlador de cuerpo completo: El controlador entrenado permite al robot utilizar todos los grados de libertad manteniendo el equilibrio. Esto produce movimientos más naturales y humanos.
En pruebas con el robot humanoide G1 de Unitree, los investigadores descubrieron que era suficiente capturar los movimientos de todo el cuerpo y transferirlos con precisión a las articulaciones del robot, garantizando que los movimientos de las diferentes extremidades estuvieran coordinados.
Relacionado con esto:

Desafíos en la teleoperación humanoide
El desarrollo de sistemas de teleoperación para robots humanoides plantea a los investigadores varios desafíos complejos:
Cerrando la brecha de la encarnación
Un desafío clave es superar la "brecha de encarnación": las diferencias anatómicas entre humanos y robots. Debido a que los robots tienen proporciones, configuraciones articulares y propiedades físicas diferentes a las de los humanos, una transferencia directa de los movimientos humanos no es fácilmente posible.
Equilibrio y coordinación de todo el cuerpo
El seguimiento de cuerpo completo en humanos requiere no solo el control preciso de las articulaciones individuales, sino también el mantenimiento dinámico del equilibrio durante movimientos complejos. Los sistemas de teleoperación convencionales suelen centrarse únicamente en movimientos aislados, como la locomoción o la manipulación, mientras que TWIST permite movimientos coordinados de cuerpo completo.
Latencia y retroalimentación sensorial
Los sistemas de teleoperación deben superar problemas como la latencia (retardo temporal) y las limitaciones en la retroalimentación sensorial. Estos factores pueden dificultar la sincronización de las acciones humanas con las respuestas robóticas.
Diversas aplicaciones de la teleoperación por captura de movimiento
La teleoperación de robots humanoides basada en captura de movimiento abre numerosas posibilidades de aplicación:
Situaciones peligrosas y operaciones de rescate
En entornos peligrosos, se pueden utilizar robots teleoperados en lugar de humanos, por ejemplo, en la desactivación de artefactos explosivos (EOD). Entre 2015 y 2020, se realizaron aproximadamente 2000 operaciones de EOD al año solo en el Reino Unido, lo que pone de relieve la necesidad de alternativas seguras.
Tareas de manipulación complejas
Los robots humanoides pueden realizar tareas complejas de manipulación mediante teleoperación, por ejemplo, en entornos no estructurados como cocinas o talleres. Su capacidad para coordinar el uso de todo su cuerpo, incluyendo brazos, manos, piernas y pies, ofrece ventajas cruciales en este contexto.
Robótica social y expresividad
Para los robots humanoides sociales, la capacidad de realizar movimientos expresivos es esencial. El sistema OCRA (Algoritmo de Retargeting Personalizable Basado en Optimización), desarrollado en el MPI, permite el mapeo de movimiento en tiempo real entre diferentes cadenas cinemáticas, lo que resulta en movimientos intuitivos y similares a los humanos.
Enfoques alternativos y comparación de diferentes sistemas
Además de TWIST, existen otros enfoques para la teleoperación basada en captura de movimiento:
Sistemas basados en IMU
Algunos investigadores utilizan sistemas de captura de movimiento basados en IMU (Unidad de Medición Inercial), que son portátiles y más económicos que los sistemas ópticos. Esta tecnología se utiliza, por ejemplo, para la teleoperación de tareas de locomanipulación, que combinan locomoción y manipulación.
Enfoques basados en redes neuronales
Un enfoque alternativo utiliza redes neuronales para aprender una correlación entre los datos de los sensores del traje de captura de movimiento y las posiciones angulares de los actuadores del robot. Este método no requiere un modelo analítico o matemático previo del robot y, por lo tanto, puede aplicarse a diversas parejas humano-robot.
Sistemas para partes específicas del cuerpo
Además de los sistemas de teleoperación de cuerpo completo, también existen sistemas especializados que se centran en partes específicas del cuerpo, como la captura de movimiento a dos manos. Estos sistemas desempeñan un papel importante en el control preciso de robots biónicos bimanuales para tareas de manipulación delicada.
Relacionado con esto:


Avances recientes y perspectivas futuras
El desarrollo de sistemas de teleoperación para robots humanoides avanza rápidamente. Además de TWIST, los investigadores han presentado recientemente otros sistemas innovadores:
H2O: De humano a humanoide
El sistema H2O permite la teleoperación en tiempo real de un robot humanoide completo utilizando únicamente una cámara RGB. Emplea un marco basado en aprendizaje por refuerzo y un proceso de "simulación a datos" para filtrar y seleccionar los movimientos adecuados para los robots humanoides.
Teleoperación con soporte de RA
Los investigadores también están investigando cómo la realidad aumentada (RA) puede facilitar la teleoperación basada en captura de movimiento. Al visualizar una referencia virtual del brazo humano junto al brazo robótico, los usuarios pueden comprender mejor el mapeo de movimiento.
IA y captura de movimiento: el futuro de la interacción humano-robot
La teleoperación de robots humanoides mediante captura de movimiento ha avanzado considerablemente en los últimos años. Sistemas como TWIST representan un avance significativo al permitir que los robots realicen movimientos corporales completos similares a los humanos en tiempo real.
La combinación de tecnología de captura de movimiento y métodos avanzados de IA, como el aprendizaje por refuerzo y la clonación de comportamiento, abre nuevas posibilidades para la interacción humano-robot. Los robots humanoides ahora pueden realizar no solo movimientos aislados, sino también acciones coordinadas de todo el cuerpo, lo que les permite una mayor destreza y expresividad.
En el futuro, estas tecnologías podrían expandir significativamente el uso de robots humanoides en entornos peligrosos, para tareas de manipulación complejas y en contextos sociales. La mejora continua en la precisión, robustez y facilidad de uso de los sistemas de teleoperación ayudará a reducir aún más la brecha entre las capacidades humanas y la ejecución robótica.
Relacionado con esto:
Su socio global de marketing y desarrollo empresarial
☑️ Nuestro idioma comercial es el inglés o el alemán
☑️ NUEVO: ¡Correspondencia en tu idioma nativo!

Konrad Wolfenstein
Mi equipo y yo estaremos encantados de estar disponibles para usted como su asesor personal.
Puedes contactarme rellenando el formulario de contacto aquí wolfenstein@xpert.digital:o simplemente llamándome al +49 7348 4088 965. Mi dirección de correo electrónico es
Espero con ilusión nuestro proyecto conjunto.