Robótica táctil: Robots con sentido del tacto: La nueva generación de investigaciones de Vulcan y el MIT sobre reconocimiento háptico de objetos – Imagen: Xpert.Digital
El sistema de reconocimiento de objetos del MIT sin sensores especiales y el robot Vulcan de Amazon
Percepción háptica para máquinas: estableciendo nuevos estándares en el reconocimiento de objetos
En el campo de la robótica, el desarrollo de sensores táctiles y sistemas de reconocimiento supone un avance crucial, permitiendo por primera vez que las máquinas no solo vean su entorno, sino que también lo sientan. Este desarrollo se ejemplifica con el nuevo robot Vulcan de Amazon y el innovador sistema de reconocimiento de objetos del MIT. Ambas tecnologías amplían significativamente las aplicaciones de los robots y permiten realizar tareas que antes solo podían ser realizadas por humanos con su percepción háptica natural.
Relacionado con esto:


El robot Vulcan de Amazon: un gran avance en el campo del agarre robótico táctil
Fundamentos de funcionamiento y tecnológicos
El robot Vulcan, desarrollado por Amazon, representa un avance tecnológico significativo en el campo de la inteligencia artificial física. La propia Amazon describe este desarrollo como un "gran avance en robótica e IA física". El sistema consta de dos componentes principales: "Stow" para almacenar objetos y "Pick" para recuperarlos. Su característica más destacada es su capacidad de percibir su entorno táctilmente.
La base tecnológica de las capacidades táctiles de Vulcan consiste en sensores especiales de fuerza-par, con forma de disco de hockey, que permiten al robot "sentir" cuánta fuerza puede aplicar para agarrar un objeto sin dañarlo. Adam Parness, director de IA Robótica en Amazon, destaca la singularidad de este enfoque: "Vulcan no es nuestro primer robot capaz de mover objetos. Pero con su sentido del tacto —su capacidad de comprender cuándo y cómo entra en contacto con un objeto— abre nuevas posibilidades para optimizar flujos de trabajo e instalaciones".
Para clasificar los artículos en los estantes, Vulcan utiliza una herramienta similar a una regla sujeta a una plancha de pelo. Con esta "regla", aparta otros artículos para dejar espacio a los nuevos. Los brazos de agarre ajustan su fuerza de agarre según el tamaño y la forma del artículo, mientras que unas cintas transportadoras integradas lo introducen en el contenedor. Para recuperar los artículos, Vulcan utiliza una pinza de succión combinada con un sistema de cámara.
Áreas actuales de aplicación y rendimiento
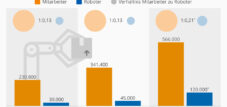
El robot Vulcan se está probando actualmente en dos centros logísticos de Amazon: en Winsen, cerca de Hamburgo (Alemania), y en Spokane, Washington (EE. UU.). En Washington, seis robots Stow Vulcan están en funcionamiento y ya han almacenado con éxito medio millón de artículos. En Winsen, dos robots Pick Vulcan están en funcionamiento y ya han procesado 50 000 pedidos.
Las capacidades del sistema son notables: Vulcan puede actualmente gestionar aproximadamente el 75 % de los millones de productos que ofrece Amazon. El objeto más pequeño que el robot puede manipular tiene aproximadamente el tamaño de un lápiz labial o una memoria USB. Particularmente impresionante es la capacidad del robot para identificar objetos en tiempo real, ya que sería «imposible que se supiera todos los detalles de los artículos de memoria», como explica Parness.
Planes futuros e integración en la cadena logística
Amazon planea aumentar significativamente el número de robots Vulcan en los próximos años. Este año, se espera que el número de Vulcan en Winsen aumente a 60 y en Washington a 50. El plan a largo plazo es implementar los robots en centros logísticos de toda Europa y EE. UU.
Un aspecto clave de la estrategia de Amazon es la coexistencia de humanos y máquinas. El plan maestro de la compañía prevé que ambos trabajen codo con codo. Los robots están diseñados principalmente para manipular productos en los estantes a los que los humanos no pueden acceder sin una escalera o que requieren agacharse excesivamente. Se espera que esto genere una mayor eficiencia general y, al mismo tiempo, reduzca la carga de trabajo de los empleados.
Sistema de detección de objetos del MIT mediante manipulación: "Detección" inteligente sin sensores especiales
Enfoque innovador para el reconocimiento de objetos
Paralelamente a Vulcan de Amazon, investigadores del MIT, Amazon Robotics y la Universidad de Columbia Británica han desarrollado un sistema que adopta un enfoque diferente para dotar a los robots de capacidades hápticas. Esta tecnología permite a los robots reconocer las propiedades de un objeto, como el peso, la suavidad o el contenido, simplemente tomándolo y sacudiéndolo suavemente, de forma similar a como lo hacen los humanos al manipular objetos desconocidos.
Lo especial de este enfoque es que no se necesitan sensores táctiles especiales. En su lugar, el sistema utiliza los codificadores articulares ya presentes en la mayoría de los robots: sensores que detectan la posición de rotación y la velocidad de las articulaciones durante el movimiento. Peter Yichen Chen, investigador posdoctoral del MIT y autor principal del artículo de investigación, explica la visión del proyecto: «Mi sueño sería enviar robots al mundo para que puedan tocar y mover objetos y descubrir de forma independiente las propiedades de todo aquello con lo que interactúan».
Funcionalidad técnica y modelos de simulación
El núcleo del sistema del MIT consta de dos modelos de simulación: uno que simula el robot y sus movimientos, y otro que replica la dinámica del objeto. Chao Liu, otro posdoctorado del MIT, destaca la importancia de estos gemelos digitales: «Una réplica digital precisa del mundo real es fundamental para el éxito de nuestro método».
El sistema utiliza una técnica llamada "simulación diferenciable", que permite al algoritmo predecir cómo pequeños cambios en las propiedades de un objeto, como la masa o la suavidad, afectarán la posición final de las articulaciones del robot. Una vez que la simulación coincide con los movimientos reales del robot, el sistema identifica las propiedades correctas del objeto.
Una ventaja clave de este método es su eficiencia: el algoritmo puede realizar los cálculos en segundos y solo requiere una trayectoria de movimiento real del robot para funcionar. Esto hace que el sistema sea especialmente rentable y práctico para aplicaciones prácticas.
Potencial de aplicación y beneficios
La tecnología desarrollada podría ser particularmente útil en aplicaciones donde las cámaras son menos efectivas, como para clasificar objetos en un sótano oscuro o limpiar escombros en un edificio parcialmente derrumbado después de un terremoto.
Dado que el algoritmo no requiere un gran conjunto de datos para su entrenamiento, a diferencia de otros métodos que se basan en visión artificial o sensores externos, es menos propenso a errores al enfrentarse a entornos desconocidos u objetos nuevos. Esto hace que el sistema sea particularmente robusto y versátil.
El panorama de investigación más amplio sobre sensores táctiles en robótica
Desafíos fundamentales y soluciones actuales
El desarrollo de robots con sentido del tacto plantea a los investigadores desafíos fundamentales. Si bien el sistema táctil humano es extremadamente complejo y complejo, los sistemas artificiales deben replicarlo mediante medios tecnológicos. Ken Goldberg, especialista en robótica de la Universidad de California, Berkeley, enfatiza la complejidad de esta tarea: «El sentido del tacto humano es increíblemente complejo y complejo, con un amplio rango dinámico. Si bien los robots progresan rápidamente, me sorprendería ver sensores táctiles a nivel humano en los próximos cinco a diez años».
A pesar de estos desafíos, se están logrando avances significativos en la investigación. Por ejemplo, el Instituto Fraunhofer IFF está desarrollando sistemas de sensores táctiles que permiten un agarre reactivo, imitando la mano humana, y son ideales para manipular objetos frágiles o flexibles. Los datos de los sensores se utilizan para la adaptación de pinzas, el reconocimiento de componentes y posiciones, y la monitorización de procesos.
Proyectos de investigación innovadores en el campo de la robótica táctil
Además de los desarrollos de Amazon y el MIT, existen otros proyectos de investigación importantes en el campo de los sensores táctiles para robots:
El Instituto Max Planck de Sistemas Inteligentes ha desarrollado un sensor háptico llamado Insight que detecta el tacto con alta sensibilidad. Georg Martius, director de un grupo de investigación del instituto, destaca el rendimiento del sensor: «Nuestro sensor demuestra un rendimiento excepcional gracias al innovador diseño mecánico de su carcasa, el sistema de imágenes a medida en su interior, la adquisición automática de datos y los métodos de aprendizaje profundo de vanguardia». El sensor es tan sensible que incluso puede detectar su propia orientación con respecto a la gravedad.
Otro proyecto interesante es DensePhysNet, un sistema que ejecuta activamente una secuencia de interacciones dinámicas (p. ej., deslizamiento y colisión) y utiliza un modelo predictivo profundo sobre sus observaciones visuales para aprender representaciones densas, píxel por píxel, que reflejan las propiedades físicas de los objetos observados. Experimentos tanto en entornos de simulación como en el mundo real muestran que las representaciones aprendidas contienen información física valiosa y pueden utilizarse directamente para decodificar propiedades físicas de los objetos, como la fricción y la masa.
Relacionado con esto:

Perspectivas futuras de los sistemas robóticos táctiles
Integración de sistemas de sensores multimodales
El futuro de la robótica táctil reside en la integración de diferentes modalidades sensoriales. Investigadores del MIT ya trabajan en la enseñanza de la inteligencia artificial para combinar sentidos como la vista y el tacto. Al comprender cómo interactúan estas diferentes modalidades sensoriales, los robots pueden desarrollar una comprensión más holística de su entorno.
El equipo del MIT ya planea combinar su método de detección de objetos con la visión artificial para crear un sistema de sensores multimodal aún más potente. «Este trabajo no pretende sustituir la visión artificial. Ambos métodos tienen sus ventajas y desventajas. Pero aquí hemos demostrado que ya podemos descubrir algunas de estas propiedades incluso sin cámara», explica Chen.
Áreas de aplicación ampliadas y desarrollos futuros
Los investigadores del equipo del MIT también quieren explorar aplicaciones con sistemas robóticos más complejos, como robots blandos, y objetos más complejos, como líquidos en movimiento o materiales granulares como la arena. A largo plazo, esperan utilizar esta técnica para mejorar el aprendizaje de los robots, lo que permitirá a los futuros robots desarrollar rápidamente nuevas habilidades de manipulación y adaptarse a los cambios en su entorno.
Amazon planea seguir desarrollando e implementando la tecnología Vulcan a mayor escala en los próximos años. La integración de Vulcan con la flota actual de 750.000 robots móviles de la compañía sugiere un concepto integral de automatización que podría transformar radicalmente el sector logístico.
Aprendizaje táctil: cuando los sensores dan a los robots el sentido del tacto
El desarrollo de robots con sentido del tacto, ejemplificado por Vulcan de Amazon y el sistema de reconocimiento de objetos del MIT, marca un punto de inflexión crucial en la robótica. Estas tecnologías permiten a los robots realizar tareas que antes eran exclusivamente del dominio humano, ya que requieren motricidad fina y comprensión táctil.
Los diferentes enfoques —el enfoque de Amazon en sensores especializados y el concepto del MIT de utilizar sensores existentes para la inferencia háptica— demuestran la diversidad de líneas de investigación en este campo. Ambos enfoques tienen sus propias fortalezas y áreas de aplicación.
Con la creciente integración de capacidades táctiles en los sistemas robóticos, se abren nuevas oportunidades para la automatización de tareas complejas en logística, manufactura, atención médica y muchos otros campos. La capacidad de los robots no solo de ver, sino también de "sentir" su entorno nos acerca significativamente a un futuro en el que robots y humanos puedan colaborar de forma aún más estrecha e intuitiva.
Relacionado con esto: