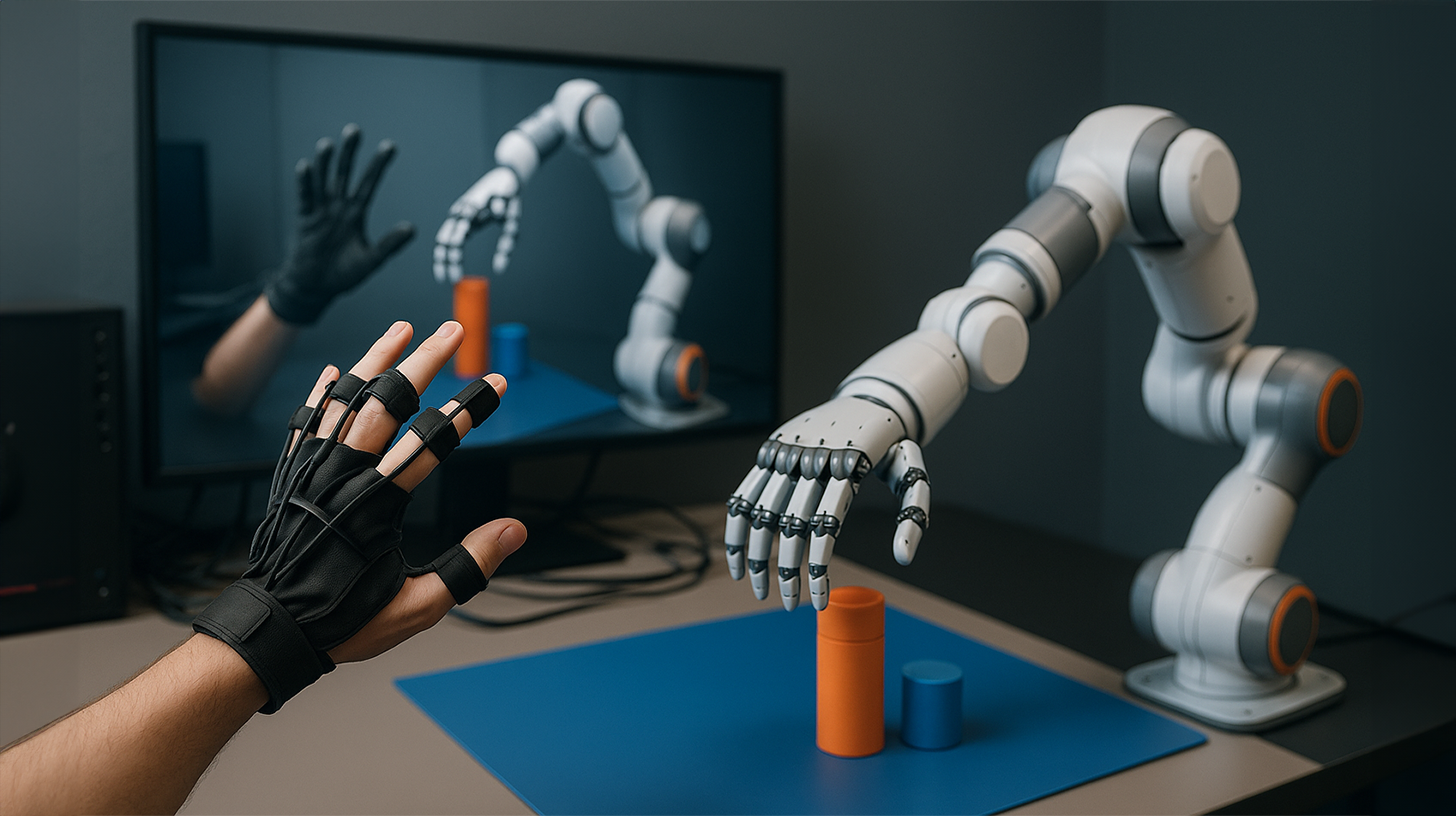
Teleoperation of robots: When the human hand conquers distance – Image: Xpert.Digital
Robots are getting smarter and smarter – but why they still need a human hand from a distance
From Mars rovers to deep-sea mining: These remotely controlled robots work where no human can survive
Imagine a surgeon in Berlin performing a highly precise operation on a patient in Tokyo without ever setting foot in the operating room. A robot explores the depths of the ocean while its pilot sits safely on shore, feeling every movement as if they were there in person. What sounds like distant science fiction is the fascinating reality of teleoperation – the technology that allows humans to control robots as an extension of their own bodies across vast distances. In an age defined by artificial intelligence and autonomy, teleoperation proves a fundamental principle: human intuition, judgment, and control are irreplaceable.
But telesurgery is far more than just a medical marvel. It's the invisible force that makes it possible to navigate rovers on Mars, extract resources from inaccessible mines, or venture into radioactively contaminated disaster zones. This comprehensive look not only illuminates the impressive technology behind this revolution. We delve into its surprising origins, which trace back to the visionary Nikola Tesla, analyze critical challenges such as the dreaded communication delay that determines success or failure, and confront the profound ethical questions associated with remotely controlling lives and work. Join us on a journey that redefines the boundaries between presence and absence and reveals how the digital duplication of humanity is forever changing our world.
The digital duplication of humans – How teleoperation overcomes boundaries, moves science and challenges conventions
The teleoperation of robots represents one of the most fascinating paradoxes of modern technology: it allows the human operator to be physically absent while simultaneously acting with absolute presence. A surgeon in New York can perform an operation in Tokyo. An inspector remains in safety while his robotic avatar descends into radioactively contaminated ruins. A mining company operates underwater mines without ever setting foot in the water. This is not science fiction, but the current reality of a technology that has fundamentally shifted the classical boundaries between presence and absence, between physical capability and cognitive control.
In a world dominated by automation, it may seem paradoxical that teleoperation—the direct human control of machines remotely—not only survives but thrives. Yet this observation reveals a deeper understanding of technology: autonomy is valuable, but control is essential. Teleoperation is the ultimate embodiment of this principle, a technology that combines human intelligence, intuition, and decision-making with the raw physical power and insensitivity of mechanical systems. The market for teleoperated robotic systems is estimated at around $890 million in 2025 and is projected to grow to over $4 billion by 2032. This is not merely a sign of economic interest but a testament to the fundamental transformation this technology is bringing about in modern society.
Historical origins: From Tesla's dream to modern reality
The history of teleoperation doesn't begin with computers, but with a man whose name is now primarily associated with electricity: Nikola Tesla. In the 1890s, Tesla conducted groundbreaking experiments with wireless remote control and recognized a fundamental principle underlying all modern teleoperation. Tesla understood that radio waves could transmit not only information, but also commands and control. His Teleautomaton, a remote-controlled boat replica, demonstrated in 1898 that machines could function as physical extensions of human will across distances. Tesla was granted U.S. Patent 613,809 for this invention, a patent that laid the intellectual foundation for all subsequent teleoperation systems.
Yet Tesla's visions remained largely unrealized for decades. It wasn't until after World War II that practical necessity drove the technology forward. In 1945, at Argonne National Laboratories near Chicago, American scientist Raymond Goertz developed a master-slave telemanipulator for safely handling radioactive material. This device allowed workers to sit behind a meter-thick concrete wall and manipulate radioactive materials through a window. This was the first practical teleoperation robot and marked the transition from theoretical possibility to industrial reality. Innovations accelerated: electric servomotors replaced direct mechanical couplings, while enclosed television systems and cameras allowed operators to choose their working position and have different viewing angles.
In the 1960s, interests shifted to new frontiers: outer space and the deep sea. The US, Soviet, and French navies became increasingly interested in telemenipulators equipped with video cameras mounted on underwater vehicles. The term "telerobot" emerged during this period to distinguish them from traditional teleoperators: telerobots possessed computer systems capable of receiving, storing, and executing commands using sensors and actuators. In the 1970s, researchers Ferrell and Sheridan revolutionized fieldwork with the concept of "supervisory control," where the operator communicated high-level objectives, which the computer then executed autonomously. This drastically reduced the operator's workload and communication bandwidth requirements.
Another milestone was the development of predictive displays in the 1980s, which made it possible to simulate a model of the robot on a computer to compensate for delays caused by communication latency. A highlight of this development was the successful demonstration of the first space telerobots aboard the NASA Space Shuttle by the German Aerospace Center (DLR) in 1993, with a communication delay of 6 to 7 seconds.
Surgical teleoperation followed a parallel path. In the 1990s, NASA's Ames Research Center and Stanford University began developing the concept of telepresence in surgery. Computer Motion's AESOP system received FDA approval in 1994. In 2001, the SOCRATES system (also from Computer Motion) enabled global collaboration by allowing a surgeon to control a robot from a remote operating console while receiving real-time video streams of the surgical site and audio communication. These developments laid the foundation for the modern da Vinci systems that dominate the field today.
Architecture and mechanisms: The technological basic structure of teleoperation
A teleoperation system is not simply a robot with a remote control. It is a highly complex interplay of hardware components, software systems, and communication protocols that together create a seamless extension of human will across space and potentially time.
At their core, teleoperation systems consist of three fundamental elements: the master device (also called the control station), the slave device or remote robot, and the communication channel that connects them. The master device is the interface between the human and the machine. It can be a traditional control panel with joysticks and switches, a virtual reality headset with hand tracking, an exoskeleton that captures the operator's movements, or even a brain-computer interface that interprets the operator's brain activity. Modern AR-based systems use the HoloLens 2 headset to provide real-time environmental sensing, processing, and virtual controls.
The robot itself is the slave device. It has actuators that translate the commands received from the master into physical movements, as well as sensors that gather information about its environment. These sensors typically include cameras for visual feedback, distance sensors for obstacle avoidance, force and torque sensors, and specialized sensors for specific applications, such as thermometers for inspections or medical instruments for surgery.
The communication channel is the most critical element and, at the same time, the Achilles' heel of modern teleoperation systems. In local applications, this can be a direct wired connection, where communication delay is measured in milliseconds. For operations over greater distances, such as in space missions or underwater, fiber optic cables, radio, or even satellite links can be used, resulting in significantly longer delays. The communicative feedback system is crucial: the operator must not only see what the robot sees but also feel what the robot feels. This haptic feedback, which conveys the sensation of resistance, texture, and force, is particularly critical for complex tasks such as surgery or manipulating fragile objects.
The technological implementation comprises several layers of control architecture. The simplest form is direct teleoperation: every movement of the operator is directly translated into a corresponding robot movement. A more sophisticated form is supervised teleoperation, in which the operator defines high-level objectives, and the robot, with the help of local sensors and computer control, autonomously determines the paths and execution details. Even more complex is assisted teleoperation, in which artificial intelligence predicts the operator's intentions and provides passive or active support.
The kinematics and dynamics of both systems—the human-arm exoskeleton system and the targeting robot system—must be carefully modeled to create effective bidirectional, continuous, and nonlinear mapping between the motion and force spaces. This is particularly important for exoskeleton-based systems where the operator is in physical contact with the remote hardware.
Another critical technical element is the integration of augmented reality and virtual environments into the control interface. AR-based systems allow operators not only to see the current image of the remote location but also to receive virtual overlays of planning data, sensor information, and real-time alerts. Virtual reality systems used in complex underwater mine clearance operations create digital 3D replicas of the remote environment, enabling operators to pre-plan and optimize their actions.
The role of 5G and edge computing in modern teleoperation systems cannot be overstated. 5G enables ultra-low latency and higher bandwidth, which is crucial for real-time control and feedback. Edge computing, which performs data processing closer to the point of operation, reduces network load and enables more complex remote tasks.
🎯🎯🎯 Benefit from Xpert.Digital's extensive, five-fold expertise in one comprehensive service package | BD, R&D, XR, PR & Digital Visibility Optimization


Benefit from Xpert.Digital's extensive, five-fold expertise in a comprehensive service package | R&D, XR, PR & Digital Visibility Optimization - Image: Xpert.Digital
Xpert.Digital possesses in-depth knowledge across various industries. This allows us to develop tailored strategies precisely aligned with the requirements and challenges of your specific market segment. By continuously analyzing market trends and monitoring industry developments, we can act proactively and offer innovative solutions. The combination of experience and expertise generates added value and provides our clients with a decisive competitive advantage.
More information here:
Teleoperation: How remote robots connect medicine, the ocean and Mars
Current applications: Where teleoperation is changing the world today
Modern teleoperation technology has spread far beyond its original domain of nuclear energy and space. It has become the infrastructure upon which critical applications in medicine, industry, disaster relief, and beyond are built.
Perhaps the best-known application is teleoperated surgery. The da Vinci Surgical System from Intuitive Surgical has become the industry standard. Over 12 million teleoperated surgeries have been performed worldwide, and the system has trained more than 60,000 surgeons globally. In 2023 alone, over 2.2 million surgeries were performed using da Vinci platforms, with the number expected to exceed 2.5 million by the end of 2024. The system features a console from which the surgeon works using a 3D view of the surgical field, while remotely controlled robotic arms guide instruments with micrometer precision. The benefits are significant: smaller incisions, reduced blood loss, faster recovery, and reduced physical strain on the surgeon.
Since 2024, new systems such as the Hugo RAS from Medtronic, based on DLR-MIRO technology, have also entered the market, offering a more cost-effective alternative that has the potential to make teleoperated surgery more accessible to smaller hospitals.
Another critical application area is space exploration. NASA's Perseverance Mars rover is teleoperated by operators on Earth, with a communication delay of between 5 and 20 minutes (depending on the positions of Earth and Mars). This necessitates semi-autonomous behavior from the rover, where high-level commands are given by the operator, but the rover makes local navigation decisions. This blend of teleoperation and autonomy will become even more critical in future missions to other celestial bodies.
Underwater applications have expanded considerably. The VAMOS (Viable Alternative Mine Operating System) project, funded by the European Union, is developing a remotely controlled underwater mining system with high-resolution 3D VR-based interfaces for the operator. The systems are connected to the surface control station via high-bandwidth fiber optic cables.
In disaster response robotics, teleoperation has become a lifeline. The DARPA Robotics Challenge demonstrated the use of teleoperated robots in complex disaster scenarios, such as the Fukushima crisis, where robots performed tasks in environments too dangerous for humans. Modern systems utilize stereoscopic head-mounted displays and real-time 3D environmental sensing to provide operators with an immersive understanding of the remote environment.
Logistics and last-mile delivery are also increasingly popular applications. At Ericsson's demonstrations in Barcelona, a driver was able to control an autonomous electric truck more than 2,000 kilometers away in Sweden. Teleoperated robots were also used to move medical supplies in two stadiums in California that had been converted into COVID-19 treatment centers.
Current challenges: When technology meets physical limits
Despite significant progress, teleoperation remains confronted with fundamental challenges that reveal the limits of what is technologically possible.
The most serious problem is communication delay, or latency. While local teleoperation systems can have delays in the single-digit millisecond range, this increases dramatically with distance. For lunar surgery, the communication delay would be about 2 seconds round trip, while for Mars operations it could be up to 40 minutes. Research has shown that teleoperation performance remains stable up to about 300 milliseconds, but begins to degrade thereafter, with path-tracking and collision errors increasing sharply after 300 milliseconds. Surgeons actually perform worse at delays above 250-300 milliseconds, which has profound implications for remote surgery.
The solution, which predictive displays were developed as early as the 1990s, worked, but simulated the future state of the remote system based on the operator's commands. These techniques have limitations, especially in the case of unexpected environmental changes or when the remote robot encounters resistance.
A second fundamental problem is haptic communication. Transmitting force, torque, and touch feedback over networks requires high packet rates and is prone to packet loss and jitter, which compromises system stability and degrades user performance. Conventional internet connections are often inadequate for these requirements, necessitating specialized communication protocols and control algorithms.
A third problem is the operator's situational awareness. A robot with body-mounted cameras offers a limited perspective compared to a person on-site who can actively scan their field of vision and look around spatially. This is particularly problematic in complex or dynamic environments. While AR and VR solutions can help mitigate this, they can lead to cognitive overload if too much information is presented.
Data bandwidth is another constraint. Transmitting high-resolution video, 3D scans from lidar or other sensors can quickly exhaust available network capacity, especially in underwater or space missions where bandwidth is limited.
Security is another key issue. The sources of error are manifold: network failures, unexpected physical interactions, and unpredictable environmental conditions. In critical applications such as surgery or disaster response, errors can be fatal. Therefore, there is a growing body of literature on robust control systems that can handle delays, packet loss, and other uncertainties.
Ethical and societal controversies: The dark side of remote control
While teleoperation is technically impressive, it raises significant ethical, legal and social questions that have so far only been partially addressed.
In telesurgery, questions of informed consent and patient autonomy are central. Language barriers, differing cultural attitudes toward robotic surgery, and disparities in healthcare infrastructure significantly complicate ethical oversight. Countries vary considerably in their medical practices, liability frameworks, and data protection standards, resulting in a fragmented legal landscape. Currently, there is no universal regulation governing these procedures.
The question of liability is particularly sensitive. If a technical error occurs during a telesurgical procedure, it is often unclear who is responsible: the surgeon, the healthcare facility, or the technology provider. In cross-border telesurgery, this ambiguity is further exacerbated by differing national jurisdictions.
Data protection and data security are further key concerns. Telesurgery transmits sensitive patient information across borders, exposing it to potential security breaches and unauthorized access. Compliance with data protection laws such as the GDPR in Europe or HIPAA in the US is critical.
Another key aspect is the question of equitable access. While telesurgery has the potential to bridge the healthcare gap between rural and urban populations and between high- and low-income countries, the reality is often less encouraging. The expensive robotic systems and necessary infrastructure are unaffordable for many countries and institutions.
In military and disaster relief applications, there are concerns regarding the potential for misuse. Teleoperated drones and robotic systems can be used for reconnaissance, surveillance, or even offensive operations, raising questions of international regulation and ethical use.
Even less researched, but increasingly worrying, is the impact on employment. Because teleoperation allows a single operator to control multiple remote robots or to outsource highly skilled work, labor markets in certain sectors could be significantly disrupted. Jobs could shift from high-wage to low-wage locations.
Future Trends: The Next Horizon of Remote Control
The future of teleoperation will be shaped by several converging trends that are potentially transformative.
Artificial intelligence and machine learning are increasingly being integrated into teleoperation systems, not to replace human control, but to enhance it. AI can assist with path planning, predict obstacles, or even automate routine sub-tasks, allowing the human operator to focus on higher-level decision-making. Predictive models can anticipate the behavior of robotic systems and compensate for communication delays.
Brain-computer interfaces (BCIs) represent a completely new frontier. While traditional interfaces like joysticks or sensors are relatively intuitive, controlling robots through directly captured brainwaves could drastically change the user experience. Research has already demonstrated systems capable of translating brain activity into robot commands with approximately 80% accuracy. Such a system could be particularly valuable in environments where workers have limited physical mobility, such as on construction sites, underwater, or in space.
5G and future 6G networks will create the foundational infrastructure for global teleoperation. The ultra-low latency and higher bandwidth of these networks will enable remote operations with unprecedented precision and responsiveness.
Virtual reality and augmented reality continue to be developed to create more immersive and intuitive control interfaces. Operators will increasingly be able to virtually "step into" the remote location and use their natural spatial abilities to guide the robot.
Another important trend is the integration of swarm robotics, where multiple robots work cooperatively. Teleoperation of a robot swarm presents unique challenges, but also opportunities for significantly enhanced capabilities in disaster response and exploration.
The continuous reduction in the cost of robotics hardware and software will make teleoperation accessible to a wider range of applications and organizations. The Hugo system, for example, offers a more cost-effective alternative to da Vinci.
Another promising trend is the combination of teleoperation with autonomous systems. Instead of complete autonomy or full teleoperation, hybrid approaches could be the way of the future, where the robot autonomously handles simple tasks or navigation, while complex decisions or unexpected situations are escalated to a human operator.
Finally, international cooperation in teleoperation is growing. Research into international standards and best practices will increase, especially in sectors such as medicine, where cross-border collaboration is likely.
The definitive role of teleoperation in the future of civilization
Teleoperation is more than a technological gimmick or a special solution for borderline cases. It is a transformative technology that fundamentally changes the relationship between humans and machines, between local and global presence, and between risk and security.
The technology originates from a simple truth: there are jobs that humans cannot perform because they are too dangerous, too remote, too precise, or too physically demanding. Teleoperation solves this problem through abstraction. It abstracts the location of the action from the location of the action. An operator in New York can move a robot inside a contaminated nuclear meltdown with the same safety and control as if they were in a control room.
Current applications of teleoperation in surgery, space, underwater operations, and disaster response demonstrate the profound relevance of this technology. Each of these fields provides evidence that teleoperation not only works, but is often the only practical solution to critical problems.
The challenges, particularly communication latency and haptic feedback, are not insurmountable. However, they require continuous innovation in communication networks, control algorithms, and human interfaces. 5G and future networks will alleviate many of these challenges.
The ethical concerns are no less real, but they are also not unique to teleoperation. They are variations on universal questions about technology, access, responsibility, and fairness. Thoughtful regulation, international standards, and an open public debate will be necessary.
Looking to the future, teleoperation will likely not be replaced by complete autonomy, but rather merged with it. Hybrid systems, in which robotics possess autonomous capabilities but escalate to human operators for critical tasks or anomalies, could become the dominant architecture.
What is the final insight? Teleoperation is the embodiment of a fundamental human capability: the ability to extend our capabilities beyond the limitations of our physical bodies. It is not a replacement for humanity, but an extension of it. In an age of rapid automation and artificial intelligence, teleoperation remains a testament to the enduring relevance and value of human intelligence, judgment, and control. It will not remain a niche area, but will become an increasingly visible and critical part of the modern technological infrastructure. The market will grow, the technology will improve, and society will learn to harness its opportunities and navigate its risks.
Your global marketing and business development partner
☑️ Our business language is English or German
☑️ NEW: Correspondence in your native language!

Konrad Wolfenstein
I and my team are happy to be available to you as your personal advisor.
You can contact me by filling out the contact form here wolfenstein@xpert.digital:or simply call me at +49 7348 4088 965. My email address is
I'm looking forward to our joint project.
☑️ SME support in strategy, consulting, planning and implementation
☑️ Creation or realignment of the digital strategy and digitization
☑️ Expansion and optimization of international sales processes
☑️ Global & Digital B2B trading platforms
☑️ Pioneer Business Development / Marketing / PR / Trade Fairs
Our global industry and economic expertise in business development, sales and marketing

Our global industry and economic expertise in business development, sales and marketing - Image: Xpert.Digital
Industry focus areas: B2B, digitalization (from AI to XR), mechanical engineering, logistics, renewable energies and industry
More information here:
A thematic hub offering insights and expertise:
- Knowledge platform covering global and regional economies, innovation and industry-specific trends
- A collection of analyses, insights, and background information from our key areas of focus
- A place for expertise and information on current developments in business and technology
- A hub for companies seeking information on markets, digitalization, and industry innovations