

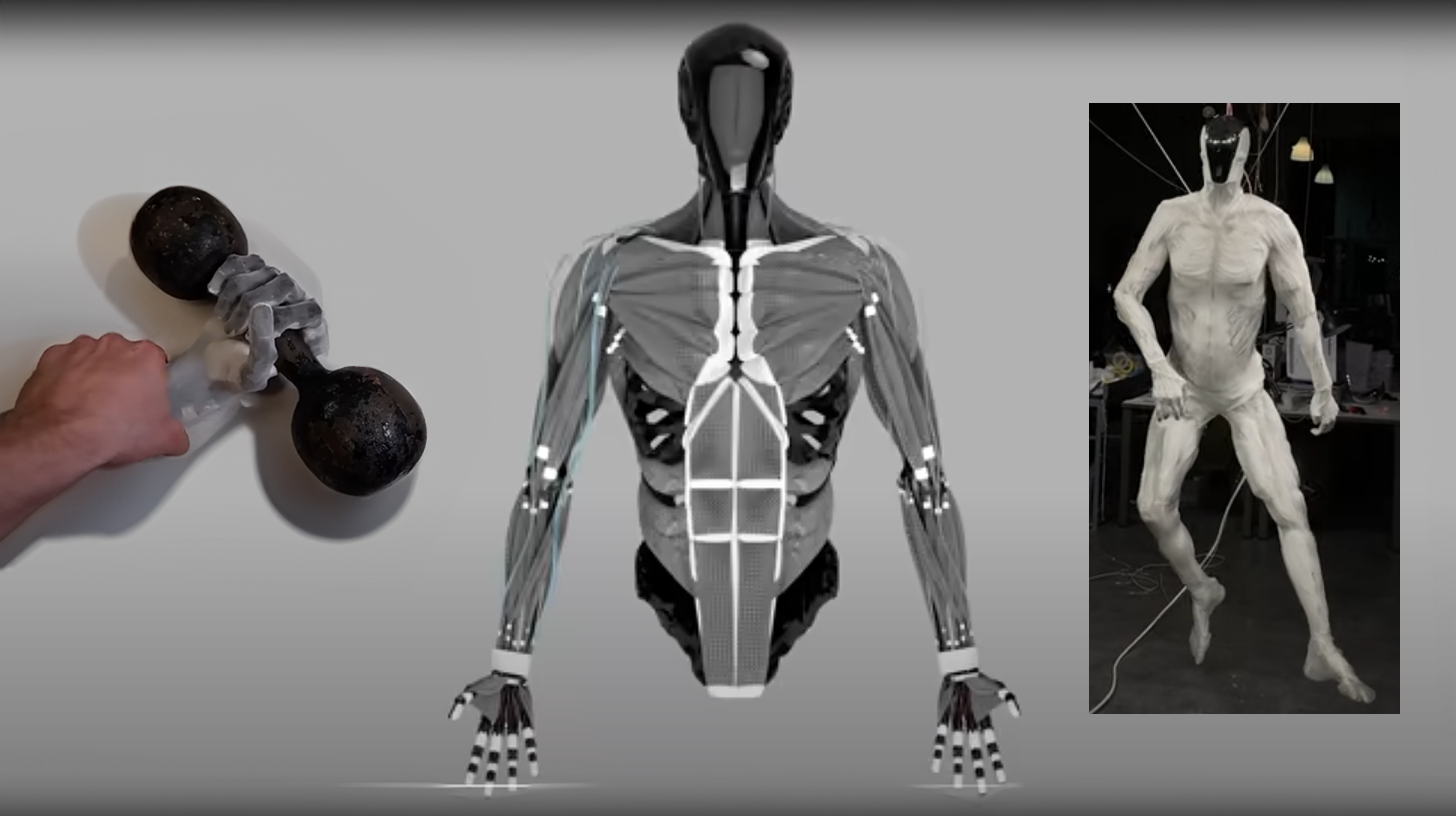
Robot Protoclone V1 od společnosti Clone Robotics překonává hranice humanoidní robotiky – je lidštější než kdy dříve – Zdroj obrázku: Clone Robotics / Kreativní obrázek: Xpert.Digital
Budoucnost robotů je biomimetická: Protoclone V1 nastavuje nové standardy
Protoclone V1: Nový standard v humanoidní robotice
Ve světě, který se rychle posouvá směrem k automatizaci a umělé inteligenci, dosáhla společnost Clone Robotics pozoruhodného milníku v robotice představením svého nejnovějšího projektu Protoclone V1. Tento humanoidní robot představuje nejen technologický pokrok, ale také zásadní změnu v tom, jak vnímáme robotiku a její integraci do našich životů. Protoclone V1 je více než jen stroj; je to komplexní biomimetický systém navržený tak, aby replikoval lidskou anatomii a pohyb s bezprecedentní úrovní detailů.
Odhalení Protoclone V1 znamená začátek nové éry v robotice. Zatímco tradiční humanoidní roboti jsou často založeni na rigidních mechanických principech, Clone Robotics volí radikálně odlišný přístup. Protoclone V1 je výsledkem hlubokého pochopení lidské biologie a komplexních mechanismů, které umožňují naše pohyby a funkce. Spíše než pouhou replikaci lidské *tvaru* si Clone Robotics klade za cíl replikovat *funkci* – přístup, který má potenciál nově definovat hranice toho, co je v robotice možné.
Souvisí s tím:
Koncept biomimikry (také bioniky nebo biomimetiky) v robotice
Protoclone V1 ztělesňuje princip biomimikry v robotice. Biomimikry, odvozené z řeckých slov „bios“ (život) a „mimesis“ (napodobování), je designový přístup, který se obrací k přírodě s cílem najít inovativní řešení lidských problémů. V robotice to znamená čerpat inspiraci z biologických systémů k vývoji robotů, kteří jsou efektivnější, přizpůsobivější a intuitivnější.
Lidské tělo je mistrovským dílem evoluce, neuvěřitelně složitým a efektivním systémem optimalizovaným po miliony let. Jeho pochopení a replikace je nesmírnou výzvou, ale také způsobem, jak vytvořit roboty schopné vykonávat úkoly způsoby, jakými to konvenční roboti nedokážou. Protoclone V1 je odvážným krokem tímto směrem a pokouší se ztělesnit jemné nuance lidské anatomie a fyziologie ve stroji.
Klíčové vlastnosti Protoclone V1: Podrobný pohled
Aby Protoclone V1 naplnil vizi biomimikry, spoléhá na řadu inovativních technologií a konstrukčních principů. Ty lze rozdělit do několika klíčových oblastí:
1. Muskuloskeletální systém: Základ lidského pohybu
Srdcem Protoclone V1 je jeho pohybový aparát, který je svou složitostí a úrovní detailů bezkonkurenční. Místo konvenčních kovových kostí a tuhých kloubů používá Clone Robotics 3D tištěné polymerové kosti modelované podle lidské anatomie. Tyto kosti jsou nejen lehčí než kov, ale také nabízejí větší flexibilitu a umožňují přirozenější pohyb.
Ještě revolučnější je použití více než 1 000 umělých myofibrilních svalů. Tato syntetická vlákna, která se pod tlakem stahují, napodobují funkci lidských svalů na mikroskopické úrovni. Na rozdíl od konvenčních elektromotorů, které jsou často objemné a neefektivní, tyto umělé svaly nabízejí vysokou hustotu síly a zároveň umožňují plynulé a plynulé pohyby. Samotný počet těchto svalů – 1 000 v Protoclone V1 – je působivý a podtrhuje závazek společnosti Clone Robotics replikovat lidské motorické dovednosti co nejpřesněji.
S více než 200 stupni volnosti Protoclone V1 daleko překonává většinu konvenčních humanoidních robotů. Stupně volnosti označují počet možností nezávislého pohybu robota. Čím více stupňů volnosti, tím flexibilnější a všestrannější jsou pohyby robota. Pro srovnání, typické průmyslové robotické rameno má přibližně 6 stupňů volnosti, zatímco vysoce pokročilí humanoidní roboti mají často 30 až 60 stupňů volnosti. 200 stupňů volnosti Protoclone V1 otevírá zcela nové možnosti pro komplexní a lidským pohyby.
2. Pohonný systém: Kombinace hydrauliky a pneumatiky
Pro pohon umělých svalů používá Protoclone V1 hybridní hydraulicko-pneumatický systém. Tento systém využívá tlakové síťové trubice k zásobování myofibrilárních svalů tekutinou nebo vzduchem, čímž řídí jejich kontrakci. 500wattové čerpadlo funguje jako „umělé srdce“ a poskytuje potřebný vysoký tlak pro pohon celého systému.
Volba hydraulického a pneumatického systému je v robotice neobvyklá, protože většina moderních robotů se spoléhá na elektromotory. Hydraulika a pneumatika však nabízejí zásadní výhody, zejména pro biomimetické aplikace. Hydraulické systémy dokáží generovat extrémně vysoké síly a zároveň umožňovat přesné pohyby, zatímco pneumatické systémy jsou známé svou rychlou dobou odezvy a flexibilitou. Kombinace obou systémů v Protoclone V1 umožňuje jak silné, tak i jemné pohyby, podobné těm, které má lidský pohybový aparát.
3. Senzory a řízení: Optimalizace v reálném čase a „pocení“
Pokročilý senzorový systém je klíčový pro to, aby Protoclone V1 vnímal své vlastní tělo a okolí. Díky 500 senzorům rozmístěným po celém robotu dokáže Protoclone V1 měřit a optimalizovat sílu a polohu v reálném čase. Tyto senzory nepřetržitě poskytují data řídicímu systému, který poté upravuje aktivaci umělých svalů tak, aby provedl požadovaný pohyb nebo akci. Tento systém zpětné vazby je srovnatelný s lidským proprioceptivním systémem, který nám umožňuje vnímat polohu a pohyb našeho těla v prostoru, aniž bychom se museli dívat.
Obzvláště inovativní vlastností Protoclone V1 je jeho integrovaný chladicí systém, který napodobuje lidské pocení. Složité mechanické systémy generují teplo, zejména při intenzivním používání. Aby se zabránilo přehřátí, mnoho robotů je vybaveno ventilátory nebo chladiči. Protoclone V1 však jde ještě o krok dál a využívá systém, který cirkuluje tekutinu porézními materiály na povrchu robota, kde se odpařuje a vytváří chladicí efekt – stejně jako lidský pot. Není to jen chytré technické řešení, ale také další příklad biomimetického přístupu společnosti Clone Robotics.
4. Vnější vzhled: Vyhýbání se „zlověstnému údolí“
Vnější vzhled Protoclone V1 je záměrně minimalistický a funkční. Místo detailní, lidské tváře má robot beztvářný design s černým hledím. Tato designová volba je pravděpodobně reakcí na fenomén „zlověstného údolí“. Zlověstné údolí popisuje pocit neklidu nebo dokonce znechucení, který lidé mohou zažívat, když humanoidní roboti nebo počítačové animace vypadají velmi lidsky, ale přesto vykazují jemné rozdíly, které je činí „špatnými“ nebo „strašidelnými“. Tím, že se Clone Robotics vzdává realistické tváře, se tomuto efektu možná snaží vyhnout a zvýšit přijetí robota.
Gumový potah, který zakrývá vnitřní mechaniku Protoclone V1, také přispívá k čistšímu a méně „mechanickému“ vzhledu. Nejenže chrání citlivé vnitřní komponenty, ale také dodává robotu určitý organický vzhled, v souladu s jeho biomimetickým designem.
Současná omezení a budoucí vývoj
Navzdory svým působivým schopnostem je Protoclone V1 stále v rané fázi vývoje a má určitá omezení. Tyto výzvy jsou však typické pro průlomové technologie a nabízejí prostor pro budoucí vylepšení a inovace.
1. Bipedální pohyb: Cesta k autonomní chůzi
Bipedální pohyb neboli chůze po dvou nohách je jednou z největších výzev v humanoidní robotice. Protoclone V1 v současné době vyžaduje vnější pomoc a nemůže chodit autonomně. To je částečně způsobeno složitostí lidské chůze, která vyžaduje přesnou souhru rovnováhy, koordinace a síly. Pneumatické pohony použité v Protoclone V1 sice nabízejí výhody z hlediska rychlosti a flexibility, ale mohou mít potíže s rychlým nastavením nezbytným pro stabilní chůzi.
Společnost Clone Robotics si je tohoto omezení vědoma a aktivně pracuje na jeho překonání. Budoucí verze Protoclone by mohly přejít na hydraulické systémy, což by umožnilo lepší odezvu a přesnější ovládání. Pokroky v technologii řízení a algoritmech plánování chůze jsou také klíčové pro výuku Protoclone V1 autonomní chůzi.
2. Spotřeba energie: Účinnost jako klíč k autonomii
Vysoká spotřeba energie robota Protoclone V1 je dalším problémem souvisejícím se složitostí jeho pohonného systému. Hydraulické a pneumatické systémy mohou být neefektivní, zejména při provozu za vysokého tlaku. Vysoká spotřeba energie omezuje autonomii robota a pro mobilní použití může vyžadovat externí zdroj napájení nebo velmi výkonné baterie.
Snížení spotřeby energie je klíčovým cílem vývoje společnosti Clone Robotics. Toho by mohlo být dosaženo zlepšením účinnosti umělých svalů, hydraulických a pneumatických komponentů nebo využitím alternativních zdrojů energie. Pokroky v technologii baterií a řízení energie budou také hrát roli v tom, že Protoclone V1 bude energeticky účinnější a autonomnější.
3. Rovnováha v reálném čase: Složitosti stability
Rovnováha v reálném čase je úzce spjata s bipedálním pohybem. Aby robot stabilně stál a chodil, musí být schopen neustále upravovat svou rovnováhu a reagovat na vnější rušení. Jak již bylo zmíněno, pneumatické pohony se mohou potýkat s rychlým nastavením nezbytným pro dynamickou rovnováhu. Hydraulické systémy mohou v tomto ohledu nabízet výhody, protože umožňují přesnější a výkonnější ovládání.
Vývoj pokročilých řídicích systémů a algoritmů pro řízení rovnováhy je klíčový pro zajištění stabilního a bezpečného pohybu Protoclone V1. To vyžaduje hluboké pochopení mechanismů lidské rovnováhy a schopnost tyto mechanismy převést do robotických systémů.
Budoucí plány a vize společnosti Clone Robotics
Navzdory současným omezením má společnost Clone Robotics ambiciózní plány na další vývoj Protoclone a jeho integraci do různých aplikačních oblastí.
Alfa verze „Klon α“: První krok ke komercializaci
Společnost Clone Robotics plánuje v roce 2025 uvést na trh alfa verzi robota Protoclone s názvem „Clone α“. Tato omezená výrobní série 279 kusů má být prvním krokem ke komercializaci a umožní testování a další vývoj robota v reálných podmínkách. Alfa verze bude pravděpodobně již obsahovat vylepšení v oblasti bipedálního pohybu, energetické účinnosti a rovnováhy, i když ještě nedosáhne všech dlouhodobých cílů společnosti.
Integrace řídicích systémů podporovaných umělou inteligencí: Inteligence pro Protoclone
Klíčovou součástí budoucího vývoje Protoclone je integrace umělé inteligence (AI). Řídicí systémy poháněné umělou inteligencí mohou robotovi umožnit autonomně vykonávat složitější úkoly, přizpůsobovat se měnícímu se prostředí a dokonce se učit novým dovednostem. Oblasti jako strojové učení, neuronové sítě a posilovací učení by mohly být využity ke zlepšení plánování pohybu Protoclone, rozpoznávání objektů, rozhodování a interakce s okolím.
Možné aplikace: Mimo laboratoř
Přestože je Protoclone V1 stále ve vývoji, objevují se již potenciální oblasti použití, kde by jeho jedinečné schopnosti mohly nabídnout přidanou hodnotu.
pomoc v domácnosti
Humanoidní podoba a mobilita Protoklonu z něj činí ideálního pomocníka pro domácí práce. Mohl by být schopen vykonávat každodenní práce, jako je vaření, úklid, praní prádla a přeprava předmětů. Integrace umělé inteligence by mu umožnila orientovat se ve složitém a nepředvídatelném domácím prostředí a plnit úkoly autonomně.
Péče a podpora
Ve stárnoucí společnosti roste potřeba pečovatelských a podpůrných služeb. Humanoidní roboti, jako je Protoclone, by v budoucnu mohli hrát důležitou roli v podpoře starších nebo zranitelných lidí. Mohli by pomáhat s každodenními úkoly, poskytovat společnost a přivolávat pomoc v nouzi.
Průmysl a výroba
Humanoidní roboti mají uplatnění také v průmyslu a výrobě. Protoclone by mohl být schopen převzít složité montážní úkoly, pracovat v uzavřených nebo nebezpečných prostředích a zbavit lidské pracovníky fyzicky náročných nebo opakujících se úkolů.
Výzkum a vývoj
Protoklon sám o sobě je cenným nástrojem pro výzkum a vývoj v robotice a souvisejících oborech. Umožňuje vědcům zkoumat hranice biomimetické robotiky, vyvíjet nové techniky řízení a prohlubovat své chápání lidského pohybu a poznávání.
Klonová robotika: Průkopník v biomimetické robotice
Společnost Clone Robotics se od ostatních robotických společností odlišuje svým konzistentním biomimetickým přístupem. Zatímco mnoho společností usiluje o to, aby roboti byli efektivnější, rychlejší nebo silnější, Clone Robotics se zaměřuje na to, aby se roboti více podobali lidem, byli přizpůsobivější a intuitivnější.
1. Biomimetický design: Příroda jako model
Celý design Protoclone V1 je inspirován lidskou anatomií a fyziologií. Použití polymerových kostí, umělých svalů, hydraulického cévního systému a dokonce i „potícího“ mechanismu demonstruje hluboký závazek společnosti Clone Robotics k biomimikry. Tento přístup jde nad rámec pouhého napodobování lidské formy; jeho cílem je pochopit základní principy a mechanismy biologických systémů a převést je do robotických systémů.
2. Umělé svaly: Revoluce v aktuátorech
Použití umělých myofibrilních svalů místo konvenčních motorů je revolučním krokem v robotice. Tyto umělé svaly nabízejí řadu výhod, které je činí ideálními pro biomimetické aplikace. Jejich rychlá reakční doba, vysoká účinnost, schopnost přirozeného pohybu, všestrannost, nízká hmotnost a integrace do holistického systému z nich činí slibnou technologii pro budoucnost robotiky.
3. Hydraulický systém: Kombinace výkonu a přesnosti
Hydraulický cévní systém Protoclone, poháněný 500wattovým čerpadlem, je dalším klíčovým aspektem jeho biomimetického designu. Umožňuje efektivní rozložení energie v celém robotu a přesné ovládání umělých svalů. Hydraulické systémy jsou známé svou schopností generovat vysoké síly a zároveň umožňovat citlivé pohyby, což je činí ideálními pro replikaci lidských motorických dovedností.
4. Vysoká mobilita: Více než 200 stupňů volnosti pro složité pohyby
200 stupňů volnosti robota Protoclone V1 svědčí o odhodlání společnosti Clone Robotics vytvářet roboty s bezkonkurenční agilitou. Tento vysoký počet stupňů volnosti umožňuje robotovi provádět složité pohyby podobné lidským, které by u konvenčních robotů nebyly možné. To otevírá nové možnosti pro aplikace v oblastech, které vyžadují obratnost, flexibilitu a přizpůsobivost.
5. Syntetické orgánové systémy: Pohled do budoucnosti
Integrace syntetických orgánových systémů, které napodobují lidské metabolické procesy, je obzvláště futuristickým aspektem Protoclone V1. To naznačuje, že Clone Robotics má dlouhodobé plány na vývoj robotů, kteří nejen vypadají a pohybují se jako lidé, ale také fungují způsobem, který je v jistém smyslu „realistický“. To by mohlo v budoucnu vést k robotům, kteří mohou fungovat autonomně po delší dobu, aniž by neustále vyžadovali externí napájení nebo údržbu.
6. Pokročilá senzorická technologie: Propriocepce pro roboty
Společnost Clone Robotics, vybavená 320 tlakovými senzory a duálními kamerami, vytváří proprioceptivní zpětnovazební smyčku podobnou lidskému nervovému systému. Tento pokročilý senzorický systém umožňuje protoklonu vnímat polohu a pohyb vlastního těla v prostoru, měřit síly a reagovat na změny v okolí. Tato proprioceptivní schopnost je klíčová pro vývoj robotů, kteří se dokáží bezpečně a efektivně pohybovat ve složitém a nepředvídatelném prostředí.
Výhody myofibrických umělých svalů podrobně
Myofibrické umělé svaly vyvinuté společností Clone Robotics nabízejí oproti konvenčním motorům v robotice řadu výhod:
1. Rychlá doba odezvy: dynamika a přesnost
Schopnost těchto umělých svalů kontrahovat se až o 30 % během 50 milisekund je působivá a umožňuje velmi rychlé a přesné řízení pohybu. Tato reakční doba je srovnatelná s dobou lidských svalů a překonává reakční dobu mnoha konvenčních elektromotorů. To je obzvláště důležité pro aplikace vyžadující dynamické pohyby, rychlé reakce a jemné nastavení.
2. Vysoká účinnost: Výkon a lehkost
Poměr síly 3 gramy k 1 kilogramu ukazuje vysokou účinnost myofibrilních umělých svalů. Dokážou generovat značnou sílu s relativně malou hmotností. To je klíčová výhoda v robotice, kde je snížení hmotnosti často klíčovým faktorem pro agilitu a energetickou účinnost. Lehčí roboti se mohou pohybovat rychleji, spotřebovávají méně energie a snáze se s nimi manipuluje.
3. Přirozené pohyby: Pružnost a organičnost
Jejich biomimetický design umožňuje umělým svalům umožnit robotům provádět plynulé a přirozené pohyby, které se velmi podobají pohybům lidského těla. Na rozdíl od často trhaných a mechanických pohybů konvenčních robotů mohou tyto umělé svaly generovat plynulé, organické pohyby, které se lidem zdají intuitivnější a méně děsivé. To je obzvláště důležité u humanoidních robotů určených k přímé interakci s lidmi.
4. Všestrannost: Jemná motorika a pohyby celého těla
Umělé svaly jsou všestranné a dokáží provádět jak jemné motorické pohyby prstů, tak dynamické pozice celého těla. Tato všestrannost otevírá širokou škálu aplikací, od přesných montážních úkolů v průmyslu až po složité interakce v domácnosti nebo v pečovatelském prostředí. Schopnost provádět jemné i hrubé motorické pohyby je klíčovou výhodou pro humanoidní roboty určené k provozu v rozmanitém a nepředvídatelném prostředí.
5. Lehká konstrukce: Mobilita a energetická účinnost
Ve srovnání s konvenčními motory přispívají umělé svaly k významnému snížení hmotnosti. To zlepšuje celkovou účinnost a agilitu robota. Nižší hmotnost znamená nejen větší mobilitu, ale také sníženou spotřebu energie, protože je třeba přemisťovat menší hmotu. To je obzvláště důležité pro mobilní roboty, které jsou napájeny z baterií.
6. Integrovaný systém: Holistická funkcionalita
Myofibrilární umělé svaly jsou součástí komplexního biomimetického systému, který zahrnuje hydraulickou cévní síť a proprioceptivní senzory. Tato integrace umožňuje holistickou a přirozeně vypadající funkčnost. Různé komponenty synergicky působí a poskytují robotovi pohyb a vnímání podobné lidským. Tento integrovaný systém je více než jen součtem svých částí a umožňuje Protoklonu fungovat způsobem, kterého by bylo obtížné dosáhnout s konvenčními robotickými konstrukcemi.
Aplikace a společenský dopad
Technologie Protoclone V1 a biomimetická robotika obecně má potenciál transformovat širokou škálu odvětví a aspektů lidského života. Kromě dříve zmíněných aplikací v domácnosti, pečovatelském sektoru a průmyslu by humanoidní roboti, jako je Protoclone, mohli v budoucnu hrát významnou roli také v následujících oblastech:
Průzkum a záchrana
V nebezpečném nebo nepřístupném prostředí, jako jsou přírodní katastrofy, hluboké moře nebo vesmír, by humanoidní roboti mohli být nasazeni k průzkumu, pátrání a záchraně. Jejich lidská podoba a mobilita by jim umožnily orientovat se ve složitých prostředích a vykonávat úkoly, které by pro člověka byly příliš nebezpečné nebo nemožné.
Zábava a vzdělávání
Humanoidní roboti by mohli být využiti v zábavním průmyslu, například jako herci, animátoři nebo interaktivní postavy v zábavních parcích. Ve vzdělávání by mohli sloužit jako interaktivní asistenti učení nebo lektoři, kteří by studentům předávali znalosti personalizovaným a poutavým způsobem.
Krok k nové robotické budoucnosti
Protoclone V1 od společnosti Clone Robotics je víc než jen další humanoidní robot. Představuje odvážný krok do nové éry robotiky, kde se biomimikry a pokročilé technologie sbíhají a vytvářejí stroje, které nejen vykonávají úkoly, ale jsou také schopny se přirozeně a intuitivně integrovat do lidského světa. Přestože Protoclone V1 stále čelí výzvám a je ve vývoji, ztělesňuje vizi robotiky s potenciálem zásadně změnit naše životy. Otázka, jak rychle dokáže Clone Robotics překonat současná omezení a vyvinout plně funkčního, autonomního, bipedálního robota, zůstává vzrušující. Jedna věc je však jistá: Protoclone V1 nastavil nový standard v humanoidní robotice a výrazně zvýšil očekávání ohledně toho, co bude možné v budoucnu.
Souvisí s tím:
Váš globální partner pro marketing a rozvoj obchodu
☑️ Naším obchodním jazykem je angličtina nebo němčina
☑️ NOVINKA: Korespondence ve vašem rodném jazyce!

Konrad Wolfenstein
Já a můj tým jsme rádi, že vám můžeme být k dispozici jako váš osobní poradce.
Můžete mě kontaktovat vyplněním kontaktního formuláře zde wolfenstein@xpert.digital:nebo mi jednoduše zavolat na číslo +49 7348 4088 965. Moje e-mailová adresa je
Těším se na náš společný projekt.