
Най-голямото в момента проучване на хуманоидната роботика от Xpert.Digital – предстои бум на пазара: От прототипи на роботи до практическо приложение
Предварително издание на Xpert

Available in 27 languages 📢
Предпочитайте Xpert.Digital в GoogleⓘПубликувано на: 13 май 2025 г. / Актуализирано на: 13 май 2025 г. – Автор: Konrad Wolfenstein

Най-голямото в момента проучване на хуманоидната роботика от Xpert.Digital – предстои пазарен бум: От прототипи на роботи до практическо приложение – Изображение: Xpert.Digital
Хуманоидна роботика: Ключът към нова индустриална революция? (Време за четене: 52 мин. / Без реклами / Без платен достъп)
За мениджмънта: Преодоляване на несъответствието – Защо интегрираните стратегии са водещи за роботите
Хуманоидната роботика е в повратна точка, преминавайки от изследователски прототипи към първоначални търговски внедрявания, особено в индустриални условия. Това бързо развитие се дължи до голяма степен на напредъка в изкуствения интелект (ИИ), особено въплътения ИИ, моделите с големи езици (LLM) и моделите за зрение-език-действие (VLA), както и на хардуерните иновации. Пазарните прогнози показват значителен растеж, като оценките варират от 30 милиарда до над 200 милиарда долара до 2035 г. Областите на приложение са разнообразни, обхващащи от индустрията и здравеопазването до системите за лична помощ. Въпреки огромния потенциал, остават значителни предизвикателства в области като технологията на батериите, сръчността на ръцете, рентабилността, мащабируемостта и етичното управление. Сближаването на намаляващите разходи за хардуер, подобряването на ИИ и нарастващия недостиг на работна ръка създава един вид „перфектна буря“, която благоприятства ускореното приемане на хуманоидни роботи. Това би могло да доведе до по-бърза възвръщаемост на инвестициите (ROI) в целеви индустриални приложения, отколкото се прогнозира от някои консервативни оценки, което от своя страна би довело до по-бързи цикли на приемане в тези ниши. Компаниите ще имат все по-големи стимули да внедряват решения за автоматизация, а хуманоидните роботи, поради своята гъвкавост, предлагат адаптивно решение за човекоцентрични среди.
Двойният фокус върху разработването на универсален изкуствен интелект и високоспециализирани хардуерни компоненти (задвижващи механизми, сензори) води до сложно взаимодействие. Напредъкът в едната област може да бъде възпрепятстван от пречки в другата, което предполага, че холистичните, интегрирани стратегии за развитие ще бъдат от решаващо значение за лидерите на пазара. Например, усъвършенстваният изкуствен интелект не може напълно да компенсира недостатъчната механична сръчност или ограниченото време за работа поради недостиг на батерии. И обратно, усъвършенстваният хардуер не може да достигне пълния си потенциал без достатъчно интелигентен софтуер. Компаниите, които могат да разработват хардуер и изкуствен интелект заедно, както е в случая с подхода за вертикална интеграция на Tesla, биха могли да имат конкурентно предимство.
Това десетилетие (2025-2035) обещава да въведе трансформативна ера за хуманоидните роботи, които имат потенциала да променят дълбоко работата, обществото и ежедневието.
Свързано с това:

Технологични пробиви: Как хуманоидните роботи променят живота ни
Хуманоидната роботика се очертава като една от най-динамичните и потенциално трансформиращи технологични области на 21-ви век. На пресечната точка на изкуствения интелект, напредналата механика, електрониката и материалознанието, хуманоидните роботи обещават фундаментално да променят начина, по който хората работят, взаимодействат и живеят. Това изследване предоставя цялостен анализ на текущото състояние, историческото развитие, технологичните основи, разнообразните приложения, пазарния пейзаж, ключовите предизвикателства и бъдещите перспективи за развитие на хуманоидните роботи, с особен акцент върху периода до 2025 г. и след това.
Определение за хуманоиден робот
Хуманоидният робот по дефиниция е робот, чиято външна форма наподобява човешкото тяло и обикновено има торс, глава, две ръце и два крака. Тази човекоподобна форма не е просто естетическа характеристика, а често служи и за функционални цели, като например взаимодействие с инструменти и среди, предназначени за хора, или за експериментални цели, например изследване на двуногото движение.
Академичните дефиниции надхвърлят обикновената физическа прилика, като подчертават, че хуманоидните роботи са внимателно проектирани да имитират не само човешкия външен вид, но и човешкото поведение. Това включва възпроизвеждане на функции като възприятие, вземане на решения и взаимодействие. Поради антропоморфния си дизайн, те предлагат присъщи предимства в човекоцентрични среди, позволявайки по-естествено взаимодействие и по-голяма адаптивност от други форми на роботи. Способността да се движат в проектирани от човека пространства и да използват инструменти, предназначени за хора, е основен аспект на тяхната функционалност и нарастваща полезност.
Самото определение за „хуманоид“ е обект на еволюция. Първоначално фокусът е бил силно насочен към физическата форма. По-новите академични съображения и технологичният напредък обаче все повече изместват този фокус към имитирането на поведение и когнитивни функции. Това развитие е значително обусловено от напредъка в изкуствения интелект. Докато хуманоидните роботи не само изглеждат човешки, но и все повече „действат“ и „разсъждават“ по човешки начин, това намалява бариерите за взаимодействие, но едновременно с това повдига по-дълбоки етични въпроси относно измамата, емоционалната връзка и природата на интелигентността.
Значение и обхват на изследването
Хуманоидната роботика представлява критична технологична граница и въплъщава сближаването на различни научни и технически дисциплини. Потенциалът ѝ да революционизира индустриите, да се справи с недостига на работна ръка, да помогне при опасни задачи и да подобри ежедневието е огромен. „Функционалната цел“ на хуманоидния дизайн – взаимодействието с човешки инструменти и среда – се очертава като основен икономически двигател. Тази адаптивност означава, че компаниите могат да интегрират хуманоидни роботи в съществуващите работни процеси с по-малко прекъсвания и капиталови разходи, отколкото биха били необходими за препроектиране на фабрики или складове за специализирани роботи. Това присъщо предимство е мощен аргумент за продажба, както е демонстрирано от пилотни програми в автомобилната и логистичната индустрия, и действа като силен катализатор за приемането им.
Това проучване има за цел да предостави цялостен анализ на текущото състояние (около 2025 г.), историческия контекст, технологичните основи, приложенията, пазарния пейзаж, предизвикателствата и бъдещите пътища за развитие на хуманоидната роботика. То е предназначено да служи като солиден ресурс за изследователи, разработчици, политици, инвеститори и широката общественост, за да разберат сложността и дългосрочните последици от тази нововъзникваща технология.
Историческо развитие на хуманоидната роботика
Очарованието от изкуствени същества, наподобяващи хора, датира далеч назад в историята и е повлияло значително на развитието на хуманоидната роботика. От древни митове до днешните високотехнологични машини, човешкият стремеж да възпроизведе интелект и движение в човекоподобна форма обхваща широк спектър.
Ранни концепции и автомати
Идеята за човекоподобни изкуствени същества може да се открие в древни митове, като тези на Хефест, който е създал механични слуги, или на Пигмалион, чиято статуя е оживяла. Ранни механични конструкции, известни като автомати, свидетелстват за този ранен интерес. Примери за това са египетските водни часовници с движещи се човешки фигури, които са отмервали часовете, механичните птици и коне на китайския инженер крал Шу Це (ок. 400 г. пр.н.е.) и програмируемите музикални автомати на Ал-Джазари през 12 век. Скиците на Леонардо да Винчи на механичен рицар от края на 15 век, способен да движи ръце, глава и челюст, също принадлежат към тази поредица от ранни концепции. Тези ранни примери демонстрират дълготрайно човешко очарование от създаването на изкуствени същества и полагат концептуалната основа за по-късни разработки.
Исторически етапи в развитието на роботите (преди 1970 г. и важни теоретични/ранни практически стъпки през 20-ти век)

Исторически етапи в развитието на роботите (преди 1970 г. и важни теоретични/ранни практически стъпки през 20-ти век) – Изображение: Xpert.Digital
Историческото развитие на роботиката преди 1970 г. се характеризира с множество важни етапи и теоретични постижения. Още през 3500 г. пр.н.е. митовете за Хефест и Пигмалион в гръцката митология описват ранни концепции за интелигентни механизми и изкуствени същества. Около 1500 г. пр.н.е. египтяните разработват водни часовници с хуманоидни фигури, представляващи първите стъпки към механична автоматизация. През 1206 г. сл.н.е. Исмаил ал-Джазари конструира ранна форма на програмируем хуманоиден робот със своята „Лодка на музиканта“. През 1495 г. сл.н.е. Леонардо да Винчи скицира механичен рицар, способен да седи и да движи главата и ръцете си. През 1769 г. Волфганг фон Кемпелен разработва „Механичния турчин“ - автомат с хуманоиден вид, който може да играе шах, въпреки че се управлява от скрит човек.
През 1920/1921 г. Карел Чапек въвежда термина „робот“ в пиесата си „RUR“, вдъхновена от чешката дума „robota“, която се превежда като „принудителен труд“. На Световното изложение през 1939 г. Westinghouse Electric представя робота „Електро“, който може да говори и да отговаря на команди. През 40-те години на миналия век Джордж Девол разработва индустриалния робот „Unimate“, който революционизира индустриалното производство чрез автоматизиране на повтарящи се задачи. През 1942 г. Айзък Азимов формулира добре познатите „Три закона на роботиката“ в своите научнофантастични разкази, предоставяйки етични насоки за взаимодействие с роботи.
През 1948 г. Норберт Винер публикува своя новаторски труд „Кибернетика“, който разглежда контрола и комуникацията в машините и живите същества, като по този начин оказва значително влияние върху развитието на роботиката. През същата година Уилям Грей Уолтър създава автономните роботи „Елмър“ и „Елси“, които могат да реагират на промените в околната среда. Накрая, през 1950 г. Алън Тюринг представя теста на Тюринг, концепция, предназначена да оцени способността на машината да проявява интелигентно поведение, неразличимо от това на човек.
20-ти век: Зората на съвременната роботика
20-ти век бележи началото на съвременната роботика, характеризираща се с теоретични основи и първоначални практически приложения. Терминът „робот“ е въведен през 1920/1921 г. от Карел Чапек в пиесата му „RUR (Универсалният робот на Росъм)“, произлизаща от чешката дума „robota“, означаваща принудителен труд. По-ранен добре познат хуманоиден робот е „Електро“, представен от Уестингхаус на Световното изложение в Ню Йорк през 1939 г., способен да отговаря на гласови команди и да изговаря прости изречения. Айзък Азимов прави значителен принос към етичната дискусия със своите „Три закона на роботиката“ (1942 г.) и популяризира термина „роботика“ като наука за роботите. Едновременно с това пионери като Норберт Винер с работата си по кибернетика (1948 г.) и Уилям Грей Уолтър с ранните си автономни роботи (1948 г.) полагат важни теоретични и практически основи. Публикацията на Алън Тюринг на теста на Тюринг (1950 г.) предоставя концептуална рамка за оценка на машинния интелект. Въпреки че не е хуманоиден, разработването на първия индустриален робот, Unimate, от Джордж Девол през 40-те до 60-те години на миналия век е ключова стъпка в технологиите за автоматизация и революционизира индустриалното производство. Този период се характеризира с интензивен литературен и научен дебат относно социалните, етичните и технологичните предизвикателства на роботиката.
Ключови етапи след 1970 г.: Възходът на функционалните хуманоиди
След 1970 г. започва ерата на функционалните хуманоидни роботи, които са способни да изпълняват все по-сложни задачи.
- WABOT-1 (1972-1973, Университет Васеда): Този робот се смята за първия в света напълно функционален, интелигентен хуманоиден робот. Разработен с цел създаване на „личен робот“, WABOT-1 може да ходи, да общува с човек на японски, да измерва разстояния и посоки до обекти с помощта на изкуствени очи и уши, както и да хваща и носи предмети с ръцете си.
- WABOT-2 (1984, Университет Васеда): Проектиран като „специален робот“, WABOT-2 е хуманоиден музикант, който може да чете ноти и да свири на електронен орган.
- Honda E-Series (1986-1993) и P-Series (1993-1997): Honda е пионер в двукракото придвижване. E-Series служи за фундаментални изследвания, докато P-Series води до по-усъвършенствани прототипи. P2 (1996) е първият саморегулиращ се двукрак робот, а P3 (1997) е първият напълно независим двукрак хуманоиден робот, способен да ходи без външни кабели.
- ASIMO (2000, Honda): Като единадесети двуног хуманоиден робот на Honda, ASIMO беше способен да работи, да взаимодейства и да изпълнява полуавтономни задачи. Подобрена версия беше представена през 2011 г. ASIMO беше въведен в Залата на славата на роботите през 2004 г. Разработката беше прекратена през 2018 г., а ASIMO беше официално пенсиониран през 2022 г. Прекратяването на проекти като ASIMO не е непременно сигнал за провал, а често е стратегическо пренасочване към по-практични или икономически жизнеспособни приложения. Това отразява зрялост на пазара, при която инвестициите в научноизследователска и развойна дейност трябва все повече да бъдат съобразени със специфичните пазарни нужди и рентабилност.
- Серия HRP (Япония, AIST/Kawada): Проектът за хуманоидна роботика (HRP) започва с модифицирани роботи Honda P3 и ги доразвива. HRP-2 (2002) е двукрак ходещ робот. HRP-4C „Miim“ (2009) е робот, проектиран от жена, който може да пее и танцува.
- Actroid (2003, Университет в Осака/Кокоро): Този робот се характеризира с реалистична силиконова кожа и е фокусиран върху човекоподобен външен вид.
- HUBO (2005, KAIST): Беше първият ходещ хуманоиден робот в Южна Корея.
- Нао (2006, Aldebaran Robotics/SoftBank): Малък, програмируем хуманоиден робот с подходи с отворен код, който е намерил широко приложение в научните изследвания и преподаването.
- Atlas (2013 г. – до момента, Boston Dynamics): Първоначално разработен за DARPA Robotics Challenge, Atlas е високодинамичен хуманоиден робот, способен да извършва сложни движения като ходене, бягане, скачане и задни салта. Напълно електрическа версия с подобрена сръчност беше представена през април 2024 г. DARPA Robotics Challenge послужи като ключов катализатор, разширявайки границите на хуманоидните възможности при бедствени сценарии и насърчавайки иновации, които сега намират своето място в търговски продукти. Усъвършенстваната мобилност и здравина, разработени за тези предизвикателства, сега са отличителни белези на търговски или почти производствени роботи.
- Валкирия (2013, НАСА): Разработена също за DARPA Robotics Challenge, Валкирия е проектирана за използване в повредени, изкуствени среди и има потенциал за космически мисии.
- Последни забележителни развития (след 2020 г.):
- Ameca (Engineered Arts, 2022): Известна с изключително изразителното си лице.
- Optimus (Tesla, 2022): Хуманоид с общо предназначение, предназначен за употреба в производството и потенциално в дома.
- Unitree G1 (2024): Сравнително евтин хуманоиден робот.
- Фигура 01/02 (Фигура AI): Хуманоиди с общо предназначение, които вече се тестват в пилотни промишлени проекти.
Историческото развитие показва ясна промяна от фундаментални изследвания, ръководени от университети (напр. ранните разработки на Васеда и Хонда), към комерсиално ориентирано развитие със специфични приложни цели (напр. Optimus на Tesla за производство, Digit на Agility за логистика). Това показва нарастващата зрялост на областта и нейната нарастваща икономическа жизнеспособност.
Основни технологии и компоненти
Възможностите на хуманоидните роботи се основават на сложно взаимодействие на различни основни технологии и компоненти. Те варират от механични системи, които осигуряват движение и структура, до усъвършенствани сензори за възприемане на околната среда, както и сложни софтуерни и изкуствени интелект архитектури, които позволяват контрол, обучение и взаимодействие. Развитието във всяка от тези области е от решаващо значение за развитието на хуманоидната роботика като цяло.
Механични системи
Механичните системи формират физическата основа на хуманоидните роботи и включват задвижващи механизми за движение, материали за конструкция и енергийни системи за работа.
Задвижващи механизми
Задвижващите механизми са двигателите, отговорни за движението в рамките на робота, имитиращи функцията на човешките мускули и стави. Идеалните задвижващи механизми трябва да имат висока плътност на мощността, ниска маса и малки размери.
- Електрически задвижващи механизми: Това са най-разпространеният тип и обикновено са по-малки. Въпреки това, за стави с човешки размер може да са необходими множество електрически задвижващи механизми на става, за да се генерира достатъчна сила (напр. HRP-2). Напредъкът в постоянните магнити (напр. неодим-желязо-бор) значително увеличи плътността на мощността на електрическите двигатели, стеснявайки разликата с хидравличните системи. Електрическите задвижващи механизми се характеризират с висока ефективност (75–80%), по-малко компоненти и по-ниски изисквания за поддръжка в сравнение с хидравличните системи. Тенденцията към електрически задвижващи механизми, дори при високодинамични роботи като новия Atlas, сигнализира за зрялост на пазара, фокусирана върху търговската жизнеспособност (ефективност, поддръжка, цена), а не върху суровата пикова производителност. Това ще ускори тяхното приемане в промишлени и потенциално потребителски приложения.
- Хидравлични задвижващи механизми: Те предлагат по-висока мощност и по-добър контрол на въртящия момент, но могат да бъдат много обемисти (напр. оригиналния Atlas). Електрохидравличните задвижващи механизми (EHA) предлагат решение за смекчаване на този проблем с размера. Хидравличните системи показват висока устойчивост на удар, но имат по-ниска ефективност (40-55%) и изискват повече поддръжка.
- Пневматични задвижващи механизми: Те функционират на базата на свиваемостта на газовете; добре познат пример е мускулът на Маккибен.
Например, Kawasaki разработва „Hydro Servo Muscle“ – електрохидравличен задвижващ механизъм, проектиран да предлага висока устойчивост на удар и плътност на мощност за своя хуманоиден робот Kaleido. Решението на Boston Dynamics да направи новия Atlas изцяло електрически предполага тенденция към комерсиализация и по-широка приложимост.
Сравнителен анализ на технологиите за задвижващи механизми за хуманоидни роботи
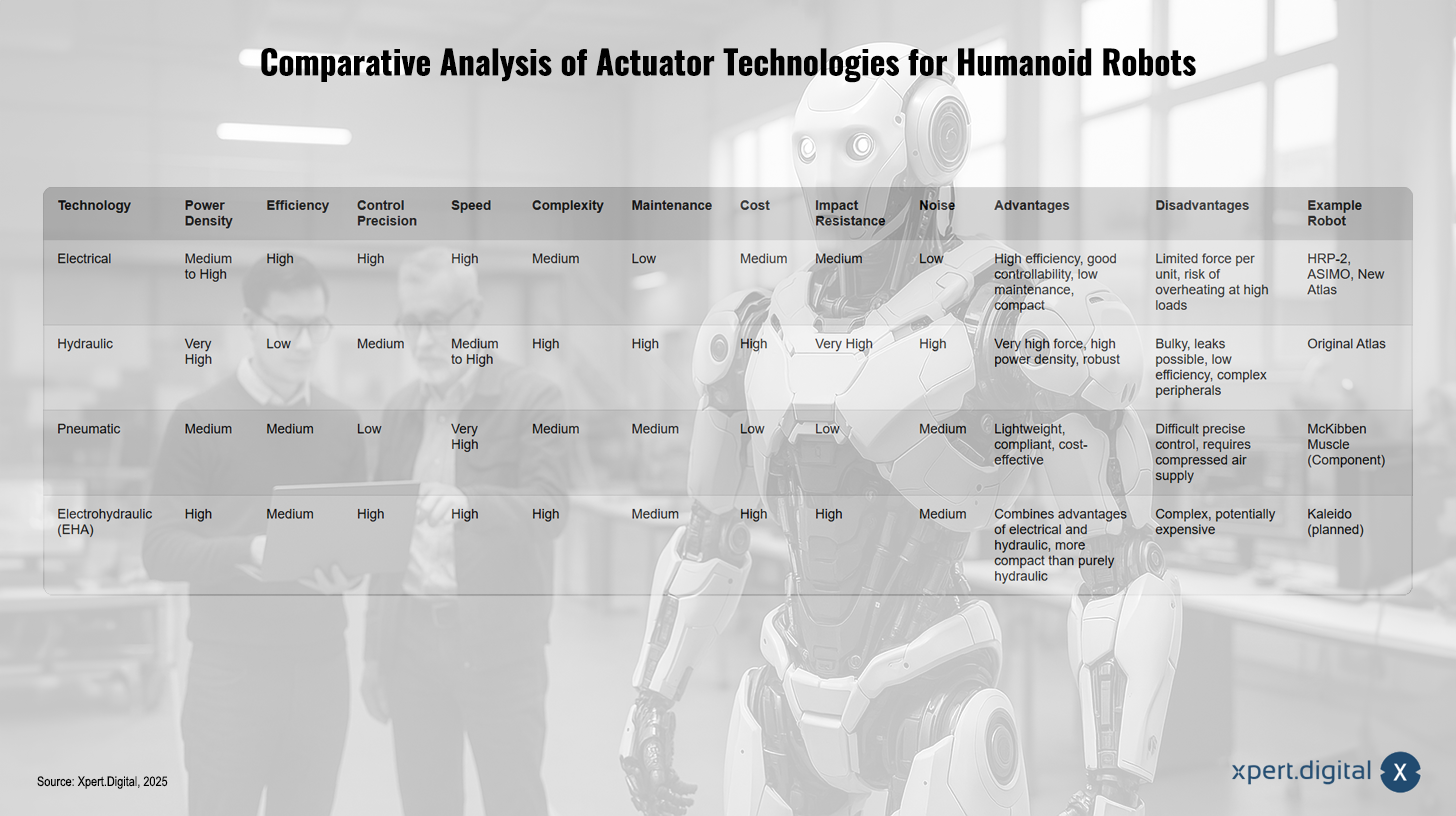
Сравнителен анализ на технологиите за задвижващи механизми за хуманоидни роботи – Изображение: Xpert.Digital
Сравнителният анализ на технологиите за задвижващи механизми за хуманоидни роботи показва, че електрическите задвижващи механизми предлагат висока ефективност, добра управляемост, ниски изисквания за поддръжка и компактност, но са ограничени по отношение на максимална сила и прегряване – примери за това са HRP-2, ASIMO и новият Atlas. Хидравличните задвижващи механизми предлагат много висока сила, висока плътност на мощността и здравина, но са обемисти, неефективни, склонни към течове и изискват сложни периферни устройства, както е демонстрирано от оригиналния Atlas. Пневматичните задвижващи механизми са привлекателни поради своята лекота, съвместимост и икономическа ефективност, но са трудни за прецизно управление и изискват захранване със сгъстен въздух; пример за това е мускулът на Маккибен. Електрохидравличните задвижващи механизми (EHA) съчетават силните страни на електрическите и хидравличните задвижвания, по-компактни са от чисто хидравличните системи, но са сложни и потенциално скъпи, какъвто е случаят с планирания Kaleido.
Материали и структурен дизайн
Леките конструкции са от решаващо значение за гъвкавостта, енергийната ефективност и удължения живот на батерията на хуманоидните роботи. Желателно е високо съотношение товар-тегло и висока структурна твърдост. Използват се методи за еволюционна структурна оптимизация (ESO), за да се намали значително теглото на рамковите конструкции (с 50,15% в едно проучване), без да се прави компромис с твърдостта или вибрационното поведение. Използваните материали включват магнезиеви сплави и полимерни смоли, както в ASIMO.
Енергийни системи (батерии)
Захранването е едно от най-големите предизвикателства. Често се използват литиево-йонни (Li-ion) и литиево-железен фосфат (LiFePO₄) батерии. Tesla Optimus, например, използва система с капацитет 2,3 kWh, 52V, докато Unitree H1 използва батерия с капацитет 15 Ah (0,864 kWh). Батерията на Valkyrie е с капацитет 1,8 kWh и позволява време на работа от около един час.
Ключовите предизвикателства са ограничената енергийна плътност, която води до кратко време на работа; високата изходна мощност, необходима за динамични действия; бавната скорост на зареждане (индустриалните приложения често изискват ~20 часа работа, докато в момента това е по-скоро 4-6 часа); и безопасността на батериите при екстремни условия на околната среда. Очаква се напредък в полутвърдите и твърдотелните батерии, които обещават по-висока енергийна плътност (напр. Xinwangda с 500 Wh/kg, Farasis Energy с >330 Wh/kg, REPT с >400 Wh/kg). Технологиите за бързо зареждане също са от решаващо значение.
Свързано с това:

Сензорни и възприемчиви системи
Хуманоидните роботи трябва да възприемат прецизно средата си, за да взаимодействат безопасно и ефективно. Възприятието играе фундаментална роля за осигуряване на безпроблемно взаимодействие с хората и околната среда. Разчитането единствено на визуални системи е недостатъчно за сложни манипулации и безопасни взаимодействия в претрупана или скрита среда. Следователно, проприоцепцията и тактилното усещане се очертават като следващите основни граници в сензорната технология за хуманоиди. Ограниченията на визуалното възприятие при задачи като хващане на скрити предмети или прилагане на прецизни сили водят до значителни усилия за изследвания и разработки в тези други сензорни модалности. Успехите в тези области ще отключат ново ниво на манипулативни способности.
Визуални системи
Камери (RGB, дълбочинни камери), LiDAR, радарни и ултразвукови сензори се използват за наблюдение на околната среда, откриване на обекти и навигация. Tesla Optimus разчита основно на камери (многокамерна система, подобна на тази в превозните си средства), докато Boston Dynamics Atlas използва LiDAR, дълбочинни и RGB сензори. Valkyrie използва системата Carnegie Robotics Multisense SL (лазер, стерео, IR-структурирана светлина), както и допълнителни аварийни камери.
Слухови системи
Микрофоните се използват за разпознаване на реч и записване на околен шум.
Тактилни сензори
Това е от решаващо значение за манипулацията, разпознаването на свойствата на обектите (форма, твърдост, мекота) и безопасното взаимодействие. То включва сензори за сила, налягане, въртящ момент, приплъзване и температура. Човешката ръка има приблизително 17 000 тактилни рецептора; възпроизвеждането на това е огромно предизвикателство. Напредъкът включва гъвкави електронни кожи (e-skins) и усъвършенствани алгоритми с изкуствен интелект. Компании като Sanctuary AI (робот Phoenix), Meta AI (Digit 360 с технология GelSight) и Duke University (SonicSense, използващ акустика) постигат напредък в тази област. Тактилните сензори позволяват хващане на сляпо, откриване на приплъзване и избягване на прекомерна сила, което е особено важно, тъй като много от настоящите роботизирани захващачи все още са прости системи с два пръста или вендузи.
Проприоцепция
Това е усещането за собствената позиция и движение на тялото без визуални или слухови стимули и е от решаващо значение за стабилния контрол, особено при меките роботи. Дори за биологичните системи това е предизвикателство; на съвременните роботи често им липсва тази богата обратна връзка. Например, рамката KineSoft използва масиви от сензори за напрежение за оценка на формата в меките роботизирани ръце.
Сливане на сензори и оценка на състоянието
Комбинирането на данни от множество сензори (мултисензорно сливане), използвайки техники като байесови филтри и методи за оптимизация (максимално апостериорно, MAP), е от решаващо значение за надеждна оценка на вътрешното състояние и разбиране на външната среда. В този контекст машинното обучение е все по-предпочитано пред системите, базирани на правила.
Софтуер, изкуствен интелект и архитектури за управление
Интелигентността и поведението на хуманоидните роботи се определят от сложен софтуер, усъвършенствани модели на изкуствен интелект и сложни архитектури за управление. Разработването на отделни компоненти (задвижващи механизми, сензори, батерии) все повече се обуславя от изискванията на изкуствения интелект и системите за управление, базирани на обучение. Това създава обратна връзка, в която напредъкът на изкуствения интелект изисква по-добър хардуер, а подобреният хардуер позволява по-сложен изкуствен интелект. Моделите на изкуствен интелект за сложни задачи като манипулация на цялото тяло или гъвкаво движение изискват високочувствителни задвижващи механизми, плътна сензорна обратна връзка (особено тактилна) и достатъчна мощност. Подходите, базирани на обучение, например, се възползват от хардуер, проектиран за съвместимост с машинно обучение (напр. просто събиране на данни, надеждни сензори). Тази коеволюция е от съществено значение за преодоляване на настоящите плато в производителността.
Локомоция и динамично равновесие
Поддържането на динамично равновесие се основава на концепции като Нулевата точка на момента (ZMP). Моделният прогнозен контрол (MPC) и контролът на цялото тяло (WBC) са популярни подходи за интегриране на сложни модели и генериране на съвместими движения. Изборът на параметри остава предизвикателство, тъй като ръчната настройка е много трудоемка. Методи като DiffTune използват диференцируемо програмиране за автоматична настройка. Подходи за обучение (напр. обучение с подсилване) се използват за двупедално движение и възстановяване след падане.
Манипулация и сръчност
Контролът на цялото тяло координира множество степени на свобода за сложни задачи. Възпроизвеждането на фината моторика на човека е важна област на изследване. Манипулацията на цялото тяло, т.е. използването на която и да е част от тялото за взаимодействие, представлява голямо предизвикателство. Роботът RoboPanoptes, например, използва зрение на цялото тяло (21 камери) за сръчност на цялото тяло. Ученето от човешки демонстрации (имитационно обучение) е ключов подход.
Навигация и взаимодействие с околната среда
Планирането на пътя, избягването на препятствия и откриването на самосблъсъци са от решаващо значение за движението в сложни среди. SLAM (едновременна локализация и картографиране), комбиниран с обучение с подсилване (RL), се използва за навигация на мобилни роботи, за да се подобри конвергенцията и да се намалят сблъсъците.
Взаимодействие човек-робот (HRI) и когнитивни способности
Езиково-езиковите модели (LLM) и визуално-езиковите модели (VLM) подобряват логическото мислене и контекстуалното разбиране на роботите, което позволява по-естествени, ориентирани към диалог взаимодействия. На роботите се придават „личности“ и любознателно поведение. Предизвикателствата включват неяснотата на езика, която може да доведе до грешки, и сложността на съпоставянето на езика с физически действия. Фината настройка на LLM върху данни за роботи (Визуално-езикови модели за действие – VLA) е обещаващ подход.
Парадигми на обучение и модели на изкуствен интелект
В ход е преход от системи, базирани на правила, към машинно обучение (ML) и дълбоко обучение (DL). Обучението с подсилване (RL) се използва за двигателни умения, както и имитационното обучение от човешки демонстрации. Преносът от симулация към реалност е от решаващо значение за ефективното обучение; платформата ToddlerBot например е проектирана за съвместимост с ML и събиране на данни. Крайната цел е изкуствен интелект (AGI), който би позволил на роботите да учат, разсъждават и да се адаптират към широк спектър от задачи като хората без специфично предварително програмиране. Характерът на „черната кутия“ на някои усъвършенствани модели на ИИ, особено в дълбокото обучение, представлява предизвикателство за критични за безопасността приложения и отстраняване на грешки. Това налага нови подходи към обяснимостта и проверката в хуманоидните системи за управление. Докато ИИ предоставя безпрецедентни възможности, трудността при разбирането как моделите на дълбоко обучение стигат до решения е проблем, особено за роботи, които взаимодействат тясно с хората или работят в опасни среди. Тази липса на интерпретируемост може да възпрепятства сертифицирането за сигурност и отстраняването на грешки и да насочи изследванията към по-прозрачен ИИ или по-надеждни методи за валидиране.
🎯🎯🎯 Възползвайте се от обширния, петкратен опит на Xpert.Digital в един цялостен пакет услуги | BD, R&D, XR, PR и оптимизация на дигиталната видимост

Възползвайте се от обширния, петкратен опит на Xpert.Digital в цялостен пакет от услуги | R&D, XR, PR и оптимизация на дигиталната видимост - Изображение: Xpert.Digital
Xpert.Digital притежава задълбочени познания в различни индустрии. Това ни позволява да разработваме персонализирани стратегии, прецизно съобразени с изискванията и предизвикателствата на вашия специфичен пазарен сегмент. Чрез непрекъснат анализ на пазарните тенденции и наблюдение на развитието в индустрията, ние можем да действаме проактивно и да предлагаме иновативни решения. Комбинацията от опит и експертиза генерира добавена стойност и осигурява на нашите клиенти решаващо конкурентно предимство.
Повече информация тук:
Комерсиализация и потенциал: Пазарният пробив на хуманоидните роботи
Приложения на хуманоидни роботи (по сектори, с фокус върху 2025 г.)
Хуманоидните роботи намират все по-голямо приложение в широк спектър от сектори, като тяхната човекоподобна форма и нарастващите им възможности ги правят идеални за задачи, традиционно изпълнявани от хора. До 2025 г. се очаква значителен напредък в тестването и първоначалното внедряване, особено в индустриалните сектори, здравеопазването и нишовите приложения. Човекоподобната форма е нож с две остриета: макар че улеснява интеграцията в човешката среда и взаимодействието човек-робот (HRI), тя също така поражда високи очаквания за сръчност и интелигентност, които в момента са трудни за изпълнение. Това може да доведе до разочарование, ако възможностите не отговарят на антропоморфното обещание. Човешката ръка притежава невероятна сръчност, а човешкият интелект е силно адаптивен. Съвременните роботи, въпреки подобренията, все още се борят с фината манипулация и стабилната работа в неструктурирана среда. Тази разлика между външния вид и действителната производителност може да повлияе негативно на приемането и възприеманите ползи, ако не се управлява внимателно.
Свързано с това:

Индустриална автоматизация (производство и логистика)
В индустриалната автоматизация хуманоидните роботи обещават да рационализират монтажните линии, работата по поддръжка и инспекция, както и логистичните процеси.
Производство: Хуманоидните роботи помагат на човешките работници с прецизни задачи, повдигане на тежки товари и повтарящи се дейности.
- Казус: BMW и Figure AI: Роботите Figure 02 са разположени в завода на BMW в Спартанбърг, Южна Каролина, за задачи като сглобяване на шасита и транспорт на части. След първоначалните пилотни проекти през 2024 г., постоянното внедряване се състоя в началото на 2025 г. Функционалните подобрения до ноември 2024 г. доведоха до 400% увеличение на скоростта на движение, което позволи на роботите да поставят до 1000 компонента на ден. Figure AI планира да произвежда от 100 000 до 200 000 бройки през следващите четири години (2025-2028 г.).
- Казус: Mercedes-Benz и Apptronik: Роботът Apollo помага на работниците в производственото хале.
- Tesla планира да внедри роботи Optimus за задачи като товарене на ламарина във фабриките си, като се очаква няколко хиляди бройки да изпълняват значими задачи до 2025 г. BYD има за цел да внедри 1500 хуманоидни робота до 2025 г., като броят им се увеличи до 20 000 до 2026 г.
Логистика и складиране: Хуманоидните роботи оптимизират обработката на материали, управлението на инвентара, както и процесите на бране, опаковане и сортиране.
- Казус: Amazon и Agility Robotics: Amazon тества робота Digit за обработка и рециклиране на контейнери в своите центрове за научноизследователска и развойна дейност и складове. Digit е проектиран за 8-часови смени. Amazon тества и робота Apollo от Apptronik.
- Хуманоидите могат да намалят човешкия труд при получаване и разтоварване на стоки, съхранение, комплектоване на поръчки, опаковане, етикетиране, доставка и товарене, както и при инвентаризация.
- IDTechEx регистрира само ограничен брой пилотни проекти (<100 хуманоида) в складове в началото на 2025 г. Мащабно внедряване (хиляди единици) не се очаква преди края на 2025 г. поради 18-30-месечните цикли на тестване. Пробив в логистиката се очаква за 2026-2027 г.
Най-успешните приложения до момента, като Moxi в болничната логистика и Digit в обработката на контейнери в складове, се фокусират върху специфични, повтарящи се задачи в относително структурирана среда, а не върху обща автономност. Това предполага път към по-широко приложение: започнете със специализирани задачи и след това обобщете с развитието на технологиите. Moxi извършва доставки, Digit премества контейнери. Това са ясно дефинирани задачи. Този подход контрастира с визията за роботи с общо предназначение. Успехът на хуманоидите, специализирани в специфични задачи, осигурява възвръщаемост на инвестициите и генерира данни за подобряване на общите възможности, създавайки положителен цикъл. Този постепенен подход е по-практичен от опитите за внедряване на пълни възможности с общо предназначение от самото начало.
Здравеопазване и грижи за възрастни хора
В този сектор хуманоидните роботи предлагат поддръжка на медицинския персонал, грижи за пациентите, социална подкрепа и мерки за рехабилитация.
Болнична логистика: Moxi, от Diligent Robotics, е внедрена в над 24 здравни системи и е извършила близо един милион доставки (лабораторни проби, консумативи), спестявайки на персонала значително време и разстояния за пешеходен туризъм. Възвръщаемостта на инвестициите е очевидна в повишена ефективност и намалено прегаряне на персонала. Моделът „Роботика като услуга“ (RaaS) вероятно ще бъде ключов двигател за внедряването му в малките и средни предприятия (МСП) и за внедряването на хуманоиди в сектори, където високите първоначални инвестиции са непосилни, като по този начин демократизира достъпа до съвременна роботика. Високите разходи за придобиване са основна бариера. Моделът RaaS намалява бариерата за навлизане, като измества разходите от капиталови разходи (Capex) към оперативни разходи (Opex). Успехът на Moxi с този модел в здравеопазването демонстрира неговата рентабилност. Тъй като хуманоидите стават все по-способни, RaaS би могъл да позволи на по-малките компании или отдели да ги използват без огромни първоначални инвестиции, потенциално ускорявайки проникването на пазара.
Грижи за възрастни хора, другарство и помощ: Роботи като Grace (Hanson Robotics), Pepper (SoftBank), Nadine, PARO, ElliQ, Temi и Toyota HSR предлагат социално взаимодействие, напомняния за лекарства, наблюдение на здравето и подкрепа при ежедневни дейности. Проучванията показват положителна ангажираност и емоционална подкрепа.
Рехабилитация: Хуманоиди като Бакстър и НАО се използват като терапевтични асистенти за пациенти с инсулт и деца, като ръководят упражненията и поддържат ангажираността на пациентите.
Хирургична помощ: Хирургичната система Da Vinci осигурява поддръжка по време на минимално инвазивни операции.
Космически изследвания и опасни среди
Космически изследвания: подпомагане на астронавти, провеждане на извънкосмически дейности (EVA), подготовка на местообитания и извършване на поддръжка на МКС или бъдещи лунни/марсиански бази. Примери за това са Robonaut 2 на НАСА (първият хуманоид в космоса), Valkyrie (проектиран за мисии до Марс) и роботите на DLR Rollin' Justin, Agile Justin и TORO. Автономната работа е от решаващо значение поради забавянията в комуникацията. Модулният дизайн за ремонтопригодност е важен (напр. Valkyrie).
Опасни среди (помощ при бедствия, ядрен сектор): Навигация в опасен терен, търсене и спасяване, доставка на помощи, работа с токсични материали, пожарогасене. Примери: Atlas от Boston Dynamics (проектиран за такива задачи), Spot във Фукушима Даичи за разузнаване, измерване на радиация и вземане на проби от отломки. Във Фукушима роботи се използват за наблюдение, обеззаразяване и подготовка за отстраняване на отломки от гориво.
Лична помощ и приложения за домакинство
Хуманоидните роботи са предназначени да поемат домакинските задължения (чистене, готвене, пране), да осигуряват сигурност и да служат като спътници в бъдеще. Тази област все още е в много ранен стадий. NEO Gamma от 1X Technologies е тестван в домашна среда за задачи като приготвяне на кафе и помощ при готвене (с дистанционно управление). Предизвикателствата включват неструктурирана домашна среда, безопасност, цена и необходимата обща интелигентност.
Образование, развлечения и обслужване на клиенти
Образование: Интерактивни помощници на учителите, персонализирано обучение, особено за STEM предмети и ученици със специални нужди. Nao от SoftBank Robotics е широко използван (>13 000 бройки в над 70 страни) и се прилага за преподаване на програмиране, културно наследство, математически концепции и за подкрепа на деца с аутизъм. Проучванията показват, че Nao повишава ангажираността, но може да има проблеми с използваемостта в шумна среда.
Развлечения: Интерактивни водещи, изпълнители в тематични паркове, на събития и в медиите. Ameca от Engineered Arts е известна с реалистичните си изражения на лицето. RoboThespian се използва за театрални представления. Очаква се пазарът на хуманоиди за забавление да нарасне значително.
Обслужване на клиенти и хотелиерство: Рецепционисти, информационни асистенти, портиери в търговията на дребно, хотели и банки. Pepper от SoftBank е тестван като робот за рецепции в болници и магазини.
Нововъзникващи и нишови приложения
Други области на приложение включват военните и отбранителните дейности (разузнаване, обезвреждане на боеприпаси, симулации на тренировки), както и селското стопанство и строителството.
Ключови области на приложение и пригодност на хуманоидните роботи (към 2025 г.)
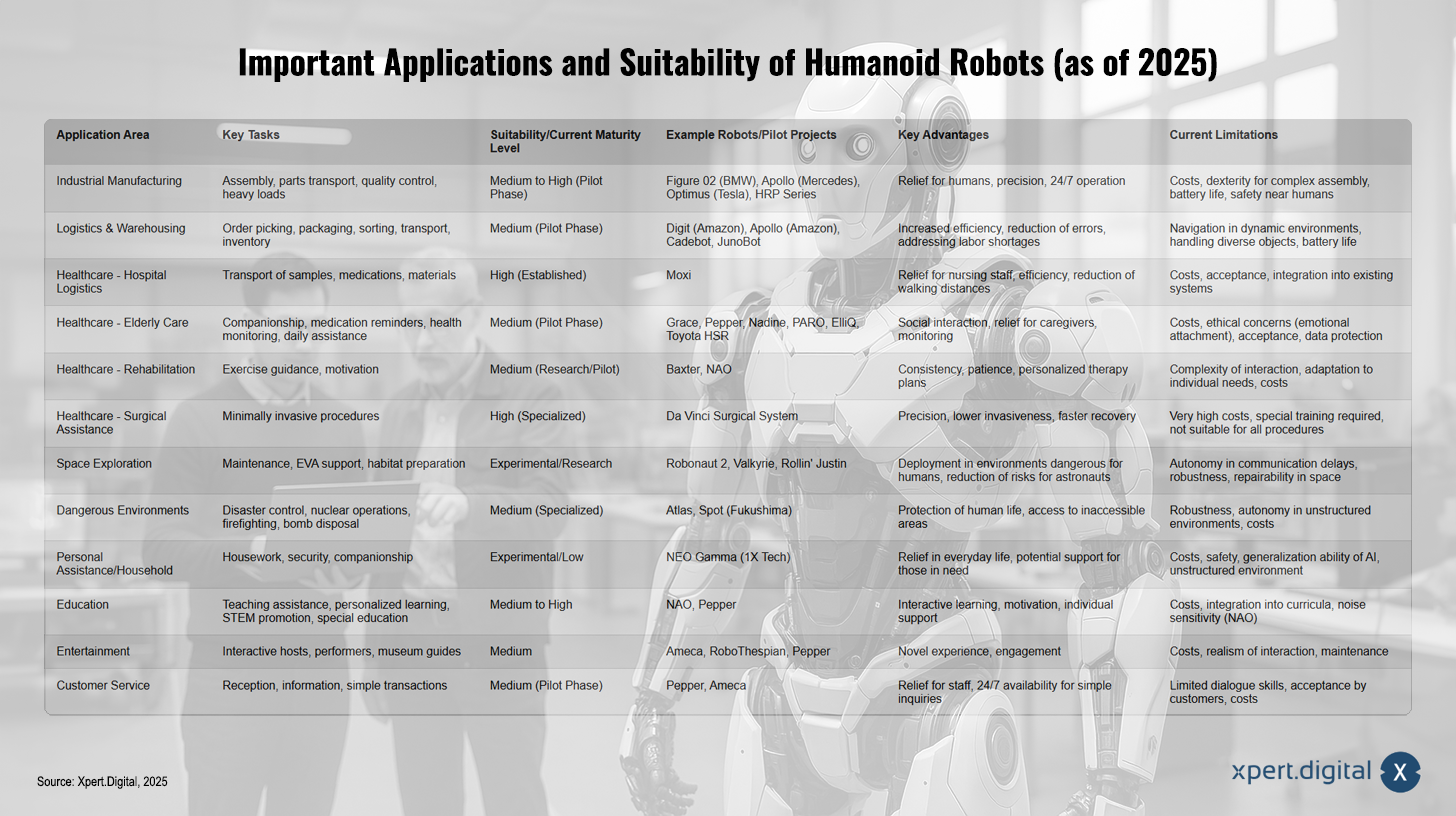
Ключови области на приложение и пригодност на хуманоидните роботи (към 2025 г.) – Xpert.Digital
Ключовите области на приложение и пригодността на хуманоидните роботи през 2025 г. обхващат множество области. В промишленото производство роботите поемат задачи като сглобяване, транспортиране на части, контрол на качеството и преместване на тежки товари. С проекти като Figure 02 (BMW), Apollo (Mercedes), Optimus (Tesla) и серията HRP, те са достигнали средно до високо ниво на зрялост, но все още са ограничени от разходите, живота на батерията и безопасността в непосредствена близост до хората. В логистиката и складирането хуманоидните роботи се използват за комплектоване на поръчки, сортиране и транспорт. Примери като Digit и Apollo на Amazon или Cadebot и JunoBot демонстрират обещаващи пилотни проекти, въпреки че остават предизвикателства като динамична среда и обработка на разнообразни обекти. В здравеопазването роботите се срещат предимно в болничната логистика, където модели като Moxi са създадени за облекчаване на медицинския персонал чрез транспортиране на проби и лекарства. В грижите за възрастни хора хуманоиди като Grace и Pepper помагат в ежедневните дейности, но етичните съображения и проблемите с поверителността на данните остават пречки. За рехабилитация, като например мотивационни упражнения, роботи като Baxter и NAO осигуряват подкрепа; Необходими са обаче допълнителни изследвания за усъвършенстване на взаимодействието. Пионер в хирургическата помощ е хирургичната система „да Винчи“, която позволява минимално инвазивни процедури с висока прецизност, но е подходяща само за специфични приложения и е много скъпа.
В космическите изследвания роботи като Robonaut 2, Valkyrie и Rollin' Justin се използват за извършване на поддръжка и подготовка на местообитания в опасни среди, като се минимизират рисковете за астронавтите. Въпреки това, остават предизвикателства по отношение на автономността, устойчивостта и ремонтопригодността. В опасни среди, като например помощ при бедствия или ядрени сценарии, роботи като Atlas и Spot предоставят основни услуги. Личната помощ и управлението на домакинствата остават експериментални с прототипи като NEO Gamma, където разходите, безопасността и гъвкавостта в неструктурирана среда все още представляват препятствия. В образованието роботи като NAO и Pepper насърчават интерактивното обучение и персонализираната подкрепа, докато разходите и интеграцията на учебните програми остават предизвикателства. Системи като Ameca и RoboThespian също присъстват в развлеченията, предлагайки нови преживявания като музейни екскурзоводи или изпълнители. В обслужването на клиенти те предоставят подкрепа на рецепцията и с информация, предлагайки предимството на 24/7 наличност; ограничените възможности за диалог и приемане обаче са проблеми. Като цяло, хуманоидните роботи показват огромен потенциал, но в момента все още се сблъскват с технологични, финансови и социални пречки, за да реализират напълно своя потенциал.
Пазарен пейзаж и комерсиализация (към 2025 г.)
Пазарът на хуманоидни роботи през 2025 г. е в динамична фаза на преход от научноизследователска и развойна дейност към началото на търговската употреба. Все по-голям брой компании, от утвърдени технологични корпорации до гъвкави стартиращи компании, движат иновациите и се борят за пазарен дял в този обещаващ сектор.
Водещи компании и платформи за хуманоидни роботи
Най-известните играчи, които движат разработването и комерсиализацията на хуманоидни роботи, включват (приблизително към 2025 г.):
- Tesla: С Optimus Gen 2, Tesla се насочва към употреба в собственото си производство и потенциално за общи асистиращи задачи.
- Boston Dynamics: Електрическият атлас е известен с изключителната си мобилност и се доразвива за изследвания, промишлени инспекции и помощ при бедствия.
- Фигура AI: С моделите Фигура 01, Фигура 02 и обявената Фигура 03, компанията се фокусира върху роботи с общо предназначение за промишлеността и логистиката, с пилотни проекти, включително в BMW.
- Agility Robotics: Роботът Digit е специално проектиран за логистични приложения и се тества от компании като Amazon.
- Apptronik: Apollo се разработва за индустриални приложения и логистика, с партньорства, включително Mercedes-Benz и Amazon.
- Unitree Robotics: Предлага по-гъвкави и рентабилни опции за изследователска, образователна и лека промишленост с модели като G1 и H1.
- Sanctuary AI: Роботът Phoenix се стреми към когнитивни способности и човекоподобно поведение за сложни задачи в различни сектори.
- 1X Technologies: NEO е предназначен за употреба в дома и за помощни задачи.
- PAL Robotics: Утвърден европейски производител с гама от роботи (REEM, TIAGo, TALOS, ARI) за изследователска, здравна и сервизна дейност.
- Honda: Въпреки че ASIMO е спрян от производство, наследството и фундаменталните изследвания на компанията остават значими за индустрията.
- Инженерни изкуства: Ameca е известна със своите изключително реалистични изражения на лицето и интерактивни възможности, предимно за социално взаимодействие и обслужване на клиенти.
- UBTech Robotics: С модели като Walker X за различни приложения.
- NEURA Robotics: 4NE-1 е проектиран за сътрудничество между човек и робот в домашна и индустриална среда.
- DEEP Robotics: Dr01 е здрав хуманоид за прецизни индустриални задачи.
- Фурие интелигентност: GR-1 се използва в различни контексти.
Известни хуманоидни роботизирани платформи (приблизително 2025 г.)
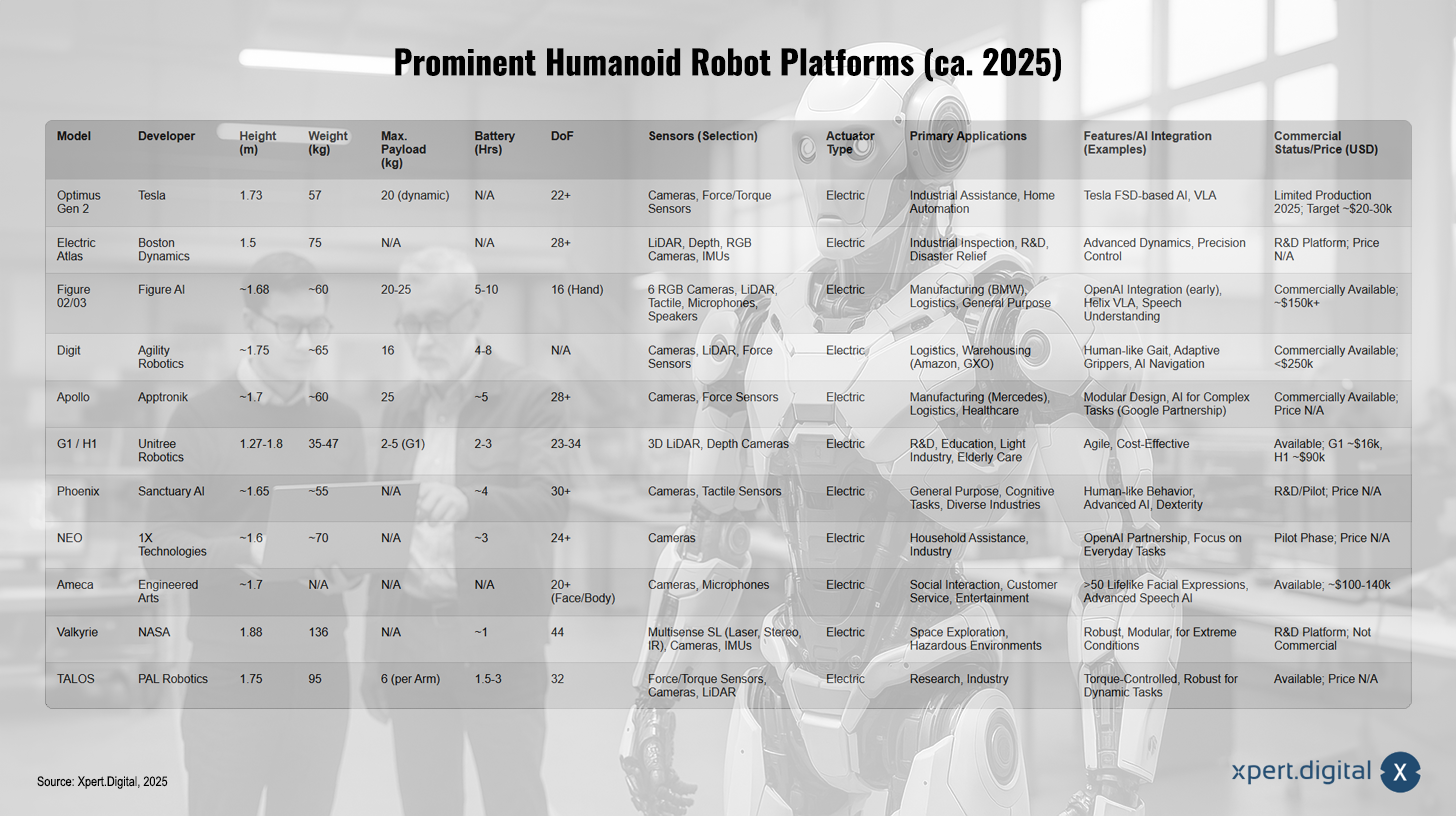
Известни хуманоидни роботизирани платформи (около 2025 г.) – Изображение: Xpert.Digital
Забележка: Данните са приблизителни или се основават на налична информация (към първото/второто тримесечие на 2025 г.). „n/a“ = не е налично. DoF = Степени на свобода.
Известните хуманоидни роботизирани платформи през 2025 г. обхващат разнообразие от впечатляващи модели, подходящи за промишлени, битови и научни приложения. Optimus Gen 2 на Tesla, висок 1,73 м с динамичен полезен товар до 20 кг, е оборудван с изкуствен интелект, базиран на Tesla FSD. С ограничено производство през 2025 г., цената му е от 20 000 до 30 000 долара. Boston Dynamics е лидер в класацията със своя Electric Atlas, модел, характеризиращ се с усъвършенствана динамика и прецизен контрол, предназначен за промишлени инспекции и помощ при бедствия. Figure AI предлага своя Figure 02/03, модел за производство, логистика и приложения с общо предназначение, използващ OpenAI интеграции и усъвършенствано разбиране на естествен език, на цена над 150 000 долара.
Digit на Agility Robotics, чиято цена е под 250 000 долара, се отличава с човешка походка и адаптивни хващачи, което го прави идеален за логистика и складиране. Apollo на Apptronik, с модулен дизайн и проектиран за сложни задачи с изкуствен интелект, вече се използва в производството и здравеопазването. По-достъпни алтернативи, като Unitree Robotics G1, чиято цена е около 16 000 долара, предлагат гъвкавост и ефективност за леки промишлени и образователни приложения. Phoenix на Sanctuary AI се откроява с човешкото си поведение и усъвършенстван изкуствен интелект, докато NEO на 1X Technologies се отличава с помощ при домакинството и ежедневни задачи. И двата модела все още са в пилотна фаза.
За социално взаимодействие и забавление, Ameca на Engineered Arts, включващ над 50 реалистични изражения на лицето, се предлага на цени от 100 000 долара. НАСА предлага Valkyrie, робот, проектиран за екстремни условия и космически изследвания, докато TALOS на PAL Robotics, със своя здрав и контролиран от въртящ момент дизайн, е идеален за изследвания и индустрия. Тези роботизирани платформи демонстрират забележителен напредък в технологиите, интеграцията на изкуствен интелект и гъвкавостта, като всяка платформа е съобразена със специфични изисквания и по този начин покрива широк спектър от приложения.
Тенденции в инвестициите и финансирането
Секторът на хуманоидната роботика привлича значителни инвестиции от рисков капитал, като финансирането все повече се концентрира в по-малко на брой, но по-големи кръгове. Примерите включват Figure AI, която получи 675 милиона долара през февруари 2024 г. от инвеститори като Nvidia, Джеф Безос, OpenAI и Microsoft; Physical Intelligence, която набра 400 милиона долара; и Apptronik, която получи 350 милиона долара (подкрепена от Google). OpenAI също инвестира 23,5 милиона долара в 1X Technologies. Глобалните инвестиции в хуманоидни стартиращи компании се увеличиха от приблизително 308 милиона долара през 2020 г. до 1,1 милиарда долара през 2024 г. Инвеститорите са особено привлечени от гъвкави, многофункционални роботи с усъвършенстван изкуствен интелект „мозъци“ и приложения в бързо развиващи се области като медицинската роботика. Успоредно с това, национални инициативи, особено в Китай („Произведено в Китай 2025“, „14-ти петгодишен план“), масово насърчават роботичната индустрия чрез държавна подкрепа и развитието на силни вътрешни вериги за доставки.
Размер на пазара, прогнози за растеж и сегментиране
Прогнозите за растежа на пазара на хуманоидни роботи са постоянно оптимистични, въпреки че точните цифри варират в зависимост от анализа. Като цяло се очаква 2024 г. да отбележи разработването на усъвършенствани прототипи, 2025 г. - началото на масовото производство, а 2026 г. - по-широкото търговско приемане. Този широк диапазон от пазарни прогнози отразява не само различните методологии, но и фундаменталните несигурности относно скоростта, с която могат да бъдат преодолени технологичните препятствия (вижте Раздел 6) и постигнато широко обществено приемане (вижте Раздел 7). По-оптимистичните прогнози често предполагат бързи пробиви в областта на изкуствения интелект и намаляване на разходите. Крайният размер на пазара ще зависи до голяма степен от това как се развиват тези фактори.
Обобщение на прогнозите за растеж на пазара на хуманоидни роботи
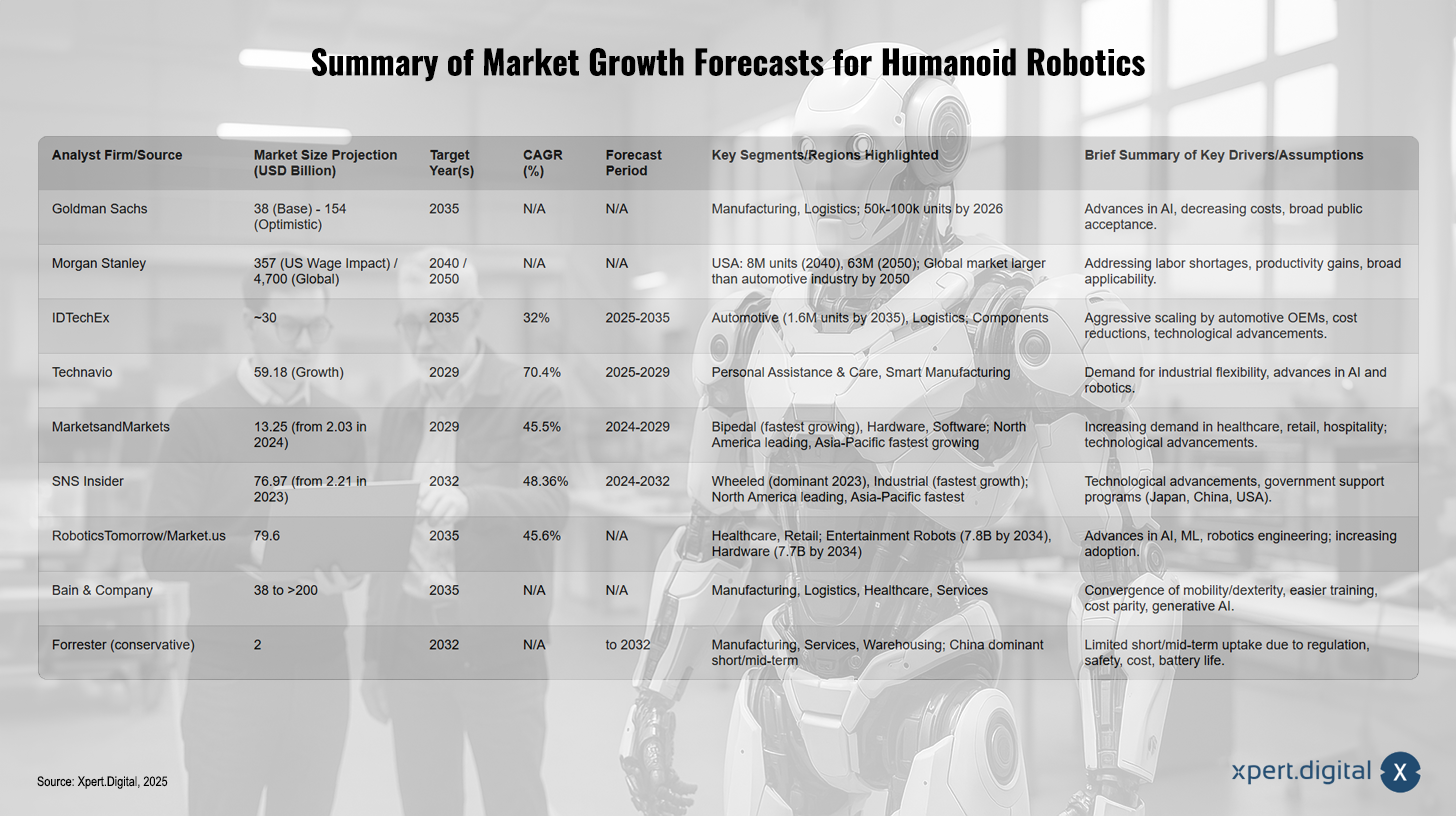
Обобщение на прогнозите за растеж на пазара на хуманоидна роботика – Xpert.Digital
Сегментиране на пазара:
- По компоненти: Хардуер (сензори, изпълнителни механизми, енергийни източници, системи за управление) и софтуер (базиран на изкуствен интелект).
- Въз основа на мобилността: двуноги (доминиращи, адаптивни за логистика, здравеопазване, образование) и колесни (стабилност, по-ниски разходи, за равни повърхности). Пазарът на двуноги роботи расте най-бързо (CAGR 54,47% 2023-2028).
- По приложение: Промишленост (автомобилна, водеща в логистиката), лична помощ и грижи (значителен растеж), изследвания, образование, развлечения, спасителни услуги, връзки с обществеността, военни.
- По региони: Северна Америка в момента е водеща, но се очаква Азиатско-тихоокеанският регион (особено Китай) да отбележи най-бърз растеж и потенциално господство поради силните вериги за доставки и правителствената подкрепа. В Европа се очаква по-бавно приемане поради трудовото законодателство и синдикатите. Геополитическото измерение (лидерството на САЩ в областта на изкуствения интелект срещу доминацията на Китай във веригата за доставки) може да доведе до регионални разделения в технологичните стандарти, приоритетите на приложенията и развитието на пазара, потенциално създавайки отделни хуманоидни екосистеми. САЩ се отличават в областта на изкуствения интелект и високоспециализираната роботика. Китай има силна производствена база и бързо развива свои собствени хуманоиди, често насочени към различни първични пазари. Това може да доведе до различни пътища на развитие, като американските фирми се фокусират върху усъвършенствани възможности, задвижвани от изкуствен интелект, а китайските фирми се възползват от икономии от мащаба в производството и ценовите предимства. Търговските политики и опасенията за националната сигурност биха могли допълнително да изострят тези различия.
Прогнозите за растежа на пазара на хуманоидна роботика показват динамично развитие, като различни анализатори предлагат различни мнения. Goldman Sachs оценява пазара на между 38 милиарда и 154 милиарда долара до 2035 г., посочвайки напредъка в изкуствения интелект (ИИ), намаляващите разходи и широкото обществено приемане като ключови двигатели. Morgan Stanley прогнозира, че глобален пазар ще надмине автомобилната индустрия до 2050 г., с до 63 милиона бройки по целия свят и значително въздействие върху заплатите в САЩ. IDTechEx очаква годишен растеж от 32% за периода 2025-2035 г., обусловен от технологичния напредък и намаляването на разходите в автомобилния и логистичния сектор. Technavio прогнозира пазарен обем от 59,18 милиарда долара до 2029 г., като определя личната помощ, грижите и интелигентното производство като ключови сегменти на растеж поради напредъка в ИИ и роботиката. MarketsandMarkets прогнозира годишен растеж от 45,5% до 2029 г., воден от Северна Америка и Азиатско-тихоокеанския регион, с нарастващо търсене в здравеопазването, търговията на дребно и хотелиерството. SNS Insider подчертава значението на правителствените програми за стимулиране и предвижда растеж до 76,97 милиарда долара до 2032 г., като Северна Америка ще е водеща, а Азиатско-тихоокеанският регион ще отбележи най-бърз растеж. RoboticsTomorrow/Market.us очаква обем от 79,6 милиарда долара до 2035 г., ускорен от напредъка в изкуствения интелект, машинното обучение и роботиката, с особени перспективи в развлеченията и хардуера. Bain & Company прогнозира пазар от 38 до над 200 милиарда долара до 2035 г. и вижда потенциал в области като производство, здравеопазване и генеративен изкуствен интелект. За разлика от това, Forrester остава по-консервативен, очаквайки само 2 милиарда долара до 2032 г., поради предизвикателства като регулиране, безопасност и ефективност на батериите. Като цяло растежът се дължи на напредъка в технологиите, изкуствения интелект и нарастващото търсене на автоматизация, производителност и ефективност.
Бизнес модели (напр. RaaS)
Моделът „Роботика като услуга“ (RaaS) набира скорост. Той позволява на компаниите да наемат роботи, вместо да правят големи първоначални инвестиции, което прави хуманоидните роботи достъпни за малките и средни предприятия (МСП). Моделите на директни продажби и лизинг ще трансформират индустриалния пейзаж. Появата на RaaS не е просто модел на финансиране, а стратегически фактор, който би могъл значително да ускори приемането им в МСП и развиващите се сектори, като намали бариерите за навлизане и по този начин разшири пазарната база отвъд големите корпорации. Високите разходи за придобиване са основна пречка. RaaS трансформира инвестиционните разходи в оперативни разходи, което прави усъвършенстваната роботика по-достъпна. Това е особено важно за МСП, които не могат да си позволят големи инвестиции. Ако хуманоидите могат да бъдат ефективно внедрени чрез RaaS, това би могло да доведе до много по-бързо проникване на пазара, отколкото ако продажбите бяха изцяло базирани на капиталови стоки, и потенциално да надхвърли някои консервативни прогнози за приемане.
Конкурентна динамика и пазарно позициониране
Конкуренцията е между вертикално интегрирани разработчици (напр. Tesla, която разработва хардуер и изкуствен интелект вътрешно) и компании, които разчитат на партньорства (напр. Figure AI първоначално с OpenAI, Apptronik с Google). САЩ са водещи в обучението по изкуствен интелект и приложенията от висок клас, докато Китай доминира във веригите за доставки, като първоначално се фокусира повече върху развлеченията и образованието, но бързо наваксва в индустриалния сектор. Според Hype Cycle на Gartner, хуманоидните роботи са навлезли във фазата „Иновационен спусък“ през 2024 г., въпреки че широкото им приемане може да е на повече от 10 години разстояние. Forrester класира хуманоидите като една от 10-те най-нови технологии през 2025 г. и прогнозира революционно въздействие до 2030 г.
Нашата препоръка: 🌍 Неограничен обхват 🔗 Свързани 🌐 Многоезични 💪 Продажбена сила: 💡 Автентични със стратегия 🚀 Иновациите срещат 🧠 Интуицията

От локално към глобално: Малките и средни предприятия завладяват световния пазар с умна стратегия - Изображение: Xpert.Digital
В епоха, в която дигиталното присъствие на една компания определя нейния успех, предизвикателството се крие в създаването на автентично, персонализирано и широкообхватно присъствие. Xpert.Digital предлага иновативно решение, което се позиционира като пресечна точка на индустриален център, блог и посланик на марката. То съчетава предимствата на комуникационните и продажбените канали в една платформа и позволява публикуване на 18 различни езика. Сътрудничеството с партньорски портали и възможността за публикуване на статии в Google News и списък за разпространение на пресата с приблизително 8000 журналисти и читатели увеличават максимално обхвата и видимостта на съдържанието. Това представлява ключов фактор във външните продажби и маркетинг (SMarketing).
Повече информация тук:
Следващата глава в роботиката: Трансформация човек-машина
Ключови предизвикателства пред хуманоидната роботика и нейното бъдеще
Въпреки бързия напредък и огромния потенциал, хуманоидната роботика е изправена пред редица значителни технически, търговски и обществени предизвикателства, които трябва да бъдат преодолени, за да се даде възможност за широко разпространено и успешно внедряване.
Технически предизвикателства
Хардуерни ограничения:
- Живот на батерията и плътност на мощността: Краткото време на работа (често само 2-5 часа) и дългото време за зареждане силно ограничават непрекъснатата работа. Високата изходна мощност, необходима за динамични действия, е взискателна.
- Сръчност и манипулация: Възпроизвеждането на сръчността на човешката ръка за задачи, свързани с фината моторика, и боравенето с различни предмети е голямо предизвикателство. Съвременните хващачи често са все още твърде прости. За това са необходими усъвършенствани тактилни сензори.
- Производителност на задвижващите механизми: Балансирането на производителност, скорост, прецизност, ефективност и цена при задвижващите механизми остава трудно.
- Устойчивост и интеграция на сензорите: Осигуряването на надеждна работа на сензорите в реални условия и ефективното обединяване на данни от различни типове сензори представляват предизвикателства.
- Цялостна устойчивост и надеждност: Трябва да се гарантира, че роботите функционират постоянно и без чести повреди в взискателни, неструктурирани среди.
Сложност на софтуера и изкуствения интелект:
- Общ интелект и логическо разсъждение: Постигането на човешка адаптивност, умения за решаване на проблеми и здрав разум в разнообразни и непредсказуеми ситуации е основно предизвикателство. Съвременните системи с изкуствен интелект все още могат да правят „глупави грешки“. Предизвикателството на „общия интелект“ не е просто технически проблем на изкуствения интелект, а е тясно свързано с механичната сръчност и сензорната острота. Високоинтелигентен робот със слаби физически възможности ще има ограничена употреба и обратно. Това налага подход на съвместно проектиране. За да бъде един робот наистина универсално приложим, неговият изкуствен интелект трябва да може да разбира и разсъждава в широк спектър от задачи и среди. Изпълнението на тези задачи обаче изисква сложно физическо взаимодействие – хващане на различни обекти, навигиране в сложен терен. Ако изкуственият интелект може да разработи план, но хардуерът (ръце, крака, сензори) не може надеждно да го изпълни или точно да възприеме околната среда, интелектът е безполезен. Това подчертава необходимостта от тясно свързване на разработването на изкуствен интелект и хардуер, вместо да се преследват изолирано.
- Взаимодействие човек-робот (HRI): Създаването на естествено, интуитивно и безопасно HRI, особено с потребители без експертни умения, е сложно. LLM програмите показват потенциал, но също така въвеждат нови сложности.
- Ефективност на обучението и трансфер от симулация към реалност: Разработването на алгоритми, които могат ефективно да учат сложни умения с ограничени реални данни и надеждно да прехвърлят научените поведения от симулация към физически роботи, е от решаващо значение.
- Безопасност и предвидимост: Осигуряването на безопасната работа на автономните системи, особено в непосредствена близост до хора, както и предвидимостта и проверимостта на тяхното поведение са от съществено значение. Характерът на „черната кутия“ на някои модели с изкуствен интелект е причина за безпокойство в това отношение.
Предизвикателства при комерсиализацията и мащабируемостта
- Разходи: Високите единични разходи (между 20 000 и над 150 000 долара, в зависимост от модела и характеристиките) и общите оперативни разходи (включително обучение, поддръжка и софтуер) са бариера. Паритетът на разходите с човешкия труд се наближава за някои нискоквалифицирани работни места, но все още не е постигнат повсеместно. Високата цена на хуманоидите е бариера, но общата цена на притежание и ценностното предложение (включително фактори като 24/7 работа, безопасност по време на опасни задачи и справяне с недостига на работна ръка) в крайна сметка ще определят възвръщаемостта на инвестициите. Фокусирането единствено върху единичната цена е недостатъчно. Въпреки че робот за 100 000 долара може да изглежда скъп, неговата икономическа стойност може да бъде значителна, ако може да замени множество човешки смени, да работи непрекъснато, да намали грешките и да изпълнява задачи, които хората не могат или не искат да изпълняват. Изчислението на възвръщаемостта на инвестициите трябва да бъде цялостно, като се вземат предвид повишаването на производителността, намалените разходи за труд, подобрената безопасност и повишената оперативна гъвкавост. Тази нюансирана перспектива е от решаващо значение за компаниите, които обмислят внедряването.
- Възвръщаемост на инвестициите (ROI): Демонстрирането на ясна и убедителна възвръщаемост на инвестициите за бизнеса, особено в сравнение със съществуващата специализирана автоматизация или човешки труд, е предизвикателство. Дългите тестови цикли в индустрии като логистиката (18-30 месеца) забавят вземането на решения.
- Производство и верига за доставки: Мащабирането на масовото производство на сложни хуманоидни роботи се сблъсква с пречки, като например ограничената наличност на високопрецизни винтове. Съществува зависимост от специализирани компоненти и глобални вериги за доставки. Производствените пречки за специализирани компоненти (напр. високопрецизни винтове, задвижващи механизми) предполагат, че самата верига за доставки на хуманоиди може да се превърне в ключова област за инвестиции и иновации. Това потенциално би могло да доведе до появата на нови специализирани производители на компоненти или вертикална интеграция от водещи производители на оригинално оборудване (OEM) на роботи. Масовото производство на хуманоиди изисква надеждна доставка на много специализирани части. Ако съществуващите вериги за доставки на тези части (напр. прецизни винтове) не могат да отговорят на нарастващото търсене, това ще ограничи общото производство на хуманоиди. Това създава възможност за нови компании да навлязат на пазара като доставчици на компоненти или за големи играчи като Tesla да интегрират вертикално повече производство на компоненти, за да осигурят доставки и да контролират разходите.
- Интеграция в съществуващи работни процеси: Необходимо е адаптиране на роботите към съществуващи човекоцентрични среди и работни процеси без големи скъпоструващи модификации.
- Обществено приемане и доверие: Обществените опасения относно загубата на работни места, безопасността, защитата на данните и общото наличие на човекоподобни машини трябва да бъдат преодолени.
- Регулаторни и стандартизационни пречки: Липсват ясни, глобално хармонизирани разпоредби и стандарти за безопасност за напреднали автономни хуманоиди.
Ключови технически и търговски предизвикателства в хуманоидната роботика
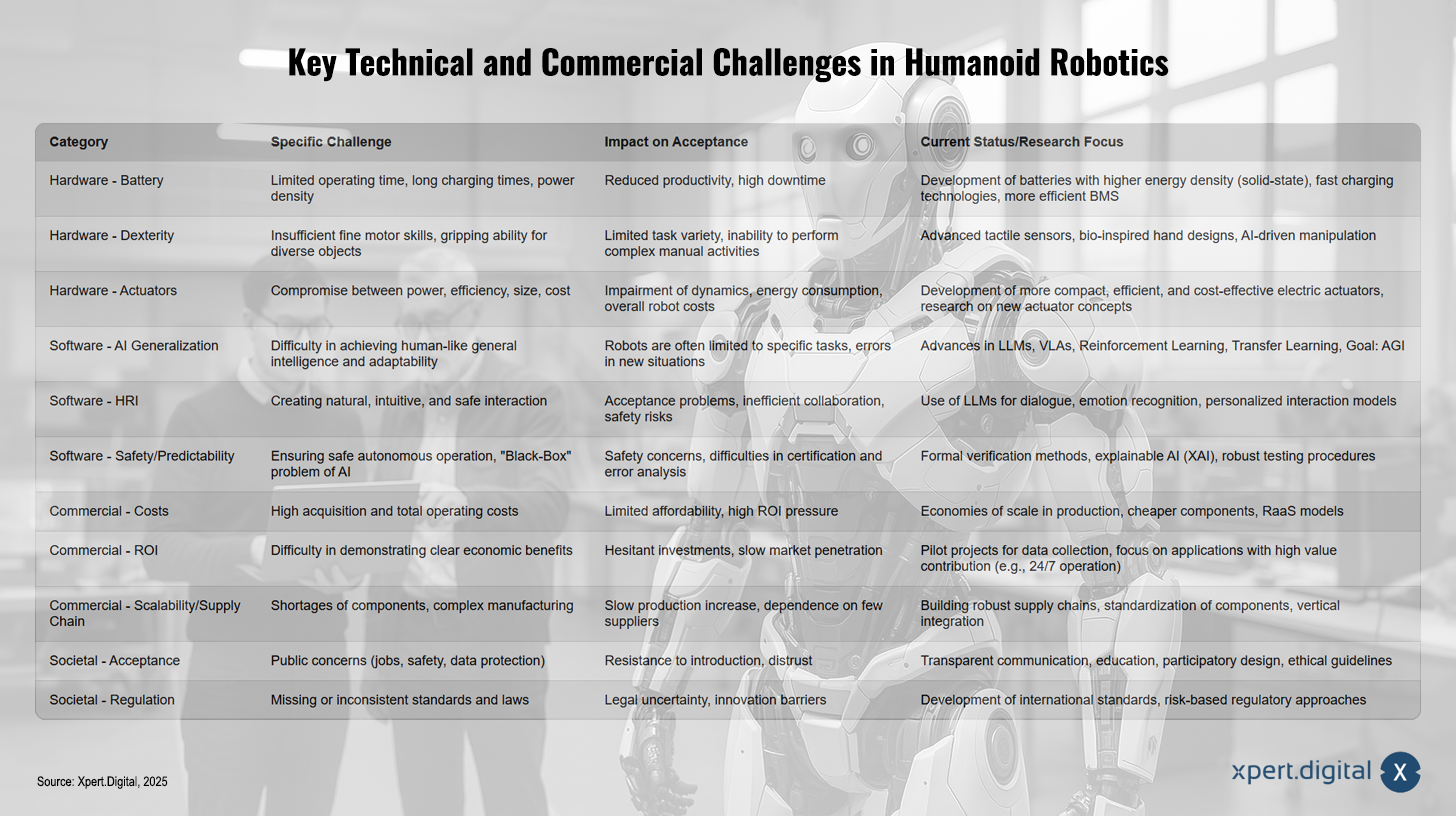
Ключови технически и търговски предизвикателства в хуманоидната роботика – Изображение: Xpert.Digital
Ключовите технически и търговски предизвикателства в хуманоидната роботика обхващат различни категории, всяка от които поставя специфични проблеми и влияе върху приемането на технологията. Предизвикателствата, свързани с хардуера, включват ограничения живот на батерията и дългото време за зареждане, което намалява производителността и води до значителен престой. Решенията включват разработването на батерии с по-висока енергийна плътност и технологии за бързо зареждане. Друг проблем са недостатъчните фина моторика и способност за хващане, което ограничава обхвата на задачите, които могат да бъдат изпълнявани. Напредъкът в тактилните сензори и биологично вдъхновените дизайни на ръцете предлагат потенциални решения тук. Задвижващите механизми също са изправени пред предизвикателството да балансират производителност, ефективност, размер и цена, което влияе върху динамиката и консумацията на енергия. В момента се разработват нови концепции и по-компактни задвижващи механизми.
От страна на софтуера, ключово препятствие се крие в обобщаването на изкуствения интелект (ИИ), тъй като интелектът и адаптивността, подобни на човешките, са трудни за постигане. Липсата на гъвкавост ограничава роботите до специфични задачи. Напредъкът в области като обучение с подсилване и трансферно обучение има за цел да реши тези проблеми. За да се даде възможност за естествени, интуитивни и безопасни взаимодействия между човек и робот (HRI), се насърчава използването на модели на ИИ, които контролират диалозите и разпознават емоциите. В същото време безопасността и предвидимостта в автономните системи са належащи проблеми, тъй като така нареченият проблем с „черната кутия“ на ИИ създава както опасения за безопасността, така и предизвикателства пред сертифицирането. Обяснимият ИИ и надеждните методи за тестване са от съществено значение в това отношение.
В търговския сектор високите разходи за придобиване и трудността при демонстриране на ясна възвръщаемост на инвестициите (ROI) представляват значителни пречки. Тези проблеми възпрепятстват инвестициите и навлизането на пазара. Решенията биха могли да включват по-достъпни компоненти, пилотни проекти за анализ на стойността и модели „Роботика като услуга“ (RaaS). Проблемите с мащабируемостта и веригата за доставки, причинени от затруднения в компонентите и сложни производствени процеси, усложняват бързото увеличаване на производството. Надеждните вериги за доставки и стандартизацията на компонентите са ключови цели в този контекст.
Обществените опасения относно загубата на работни места, безопасността и поверителността на данните влияят върху общественото приемане. Прозрачната комуникация, образованието и етичните насоки могат да помогнат за намаляване на предразсъдъците. По подобен начин липсата или непоследователното регулиране представлява проблем, водещ до правна несигурност и възпрепятстващ иновациите. Следователно международните стандарти и регулаторните подходи, основани на риска, са необходими за създаване на правни рамки, които са в крак с технологичното развитие.
Етични, обществени и управленски последици
Непрекъснатото развитие и нарастващото разпространение на хуманоидните роботи повдигат дълбоки етични, обществени и регулаторни въпроси. Те варират от въздействието върху пазара на труда и сигурността до поверителността на данните, отчетността и фундаменталната връзка между хората и машините. Етичният дебат все повече се измества от това дали можем да ги изградим към това как трябва да ги интегрираме отговорно. Това предполага нарастващо признание за предстоящото им пристигане и необходимостта от проактивно, а не реактивно управление. Предишните етични дискусии често бяха спекулативни. С пилотните проекти и бързия напредък в областта на изкуствения интелект, въпросите сега стават по-практични и неотложни. Източници като [източник 1] и [източник 2] обсъждат конкретни въпроси като отчетност, пристрастия и поверителност на данните в контекста на разгръщащите се системи. Тази промяна показва съзряване на областта и обществен ангажимент с краткосрочни последици.
Основни етични проблеми
- Загуба на работни места и икономическо въздействие: Автоматизацията на задачи, изпълнявани преди това от хора, може да доведе до безработица или стагнация на заплатите, особено в нискоквалифицираните сектори. Това налага програми за преквалификация и мрежи за социална сигурност.
- Безопасност и сигурност: Физическата безопасност на хората, взаимодействащи с мощни, автономни роботи, е от първостепенно значение. Това се утежнява от рисковете за киберсигурността и уязвимостта към атаки.
- Поверителност и наблюдение: Събирането на данни от роботи, оборудвани с усъвършенствани сензори (камери, микрофони) в домове, на работни места и в обществени пространства, поражда значителни опасения относно поверителността на данните. Биометричното проследяване, разпознаването на лица и анализът на движението са от особена важност.
- Автономия, отговорност и отчетност: Определянето на отговорността, когато автономните роботи причиняват щети или допускат грешки, е сложно. Характерът на „черната кутия“ при вземането на решения от изкуствен интелект допълнително усложнява нещата.
- Пристрастия: Системите с изкуствен интелект могат да възприемат и увековечават предразсъдъци от данни за обучение, което може да доведе до несправедливо или дискриминационно третиране в области като здравеопазване или заетост.
- Етика на взаимодействието човек-робот (HRI):
- Измама и антропоморфизъм: Роботите, които изглеждат хуманоидни или показват емоции, могат да подведат потребителите или да създадат нездравословни привързаности.
- Емоционална зависимост: Съществува риск от прекомерна зависимост от роботи като придружители или за емоционална подкрепа, особено сред уязвимите групи (възрастни хора, деца).
- Заместване на човешкото взаимодействие: Има опасения, че роботите биха могли да намалят реалния човешки контакт.
Еволюцията на етичните норми за хуманоидите вероятно ще отразява (и ще бъде повлияна от) продължаващите дебати в общата етика на изкуствения интелект, но с добавената сложност на физическото въплъщение. Това физическо присъствие повдига преки опасения за безопасността и човешката отговорност, които не присъстват в чисто софтуерно базирания изкуствен интелект. Много етични принципи за изкуствения интелект (пристрастия, прозрачност, отчетност) се отнасят пряко за хуманоидите. Физическото присъствие на хуманоида и способността му да взаимодейства в света обаче въвеждат уникални рискове (физическа вреда) и динамика на взаимодействие (емоционална връзка). Следователно, етиката на хуманоидните роботи изисква специализиран фокус, който надгражда, но и разширява общата етика на изкуствения интелект.
Преглед на етичните и обществените проблеми, свързани с хуманоидната роботика
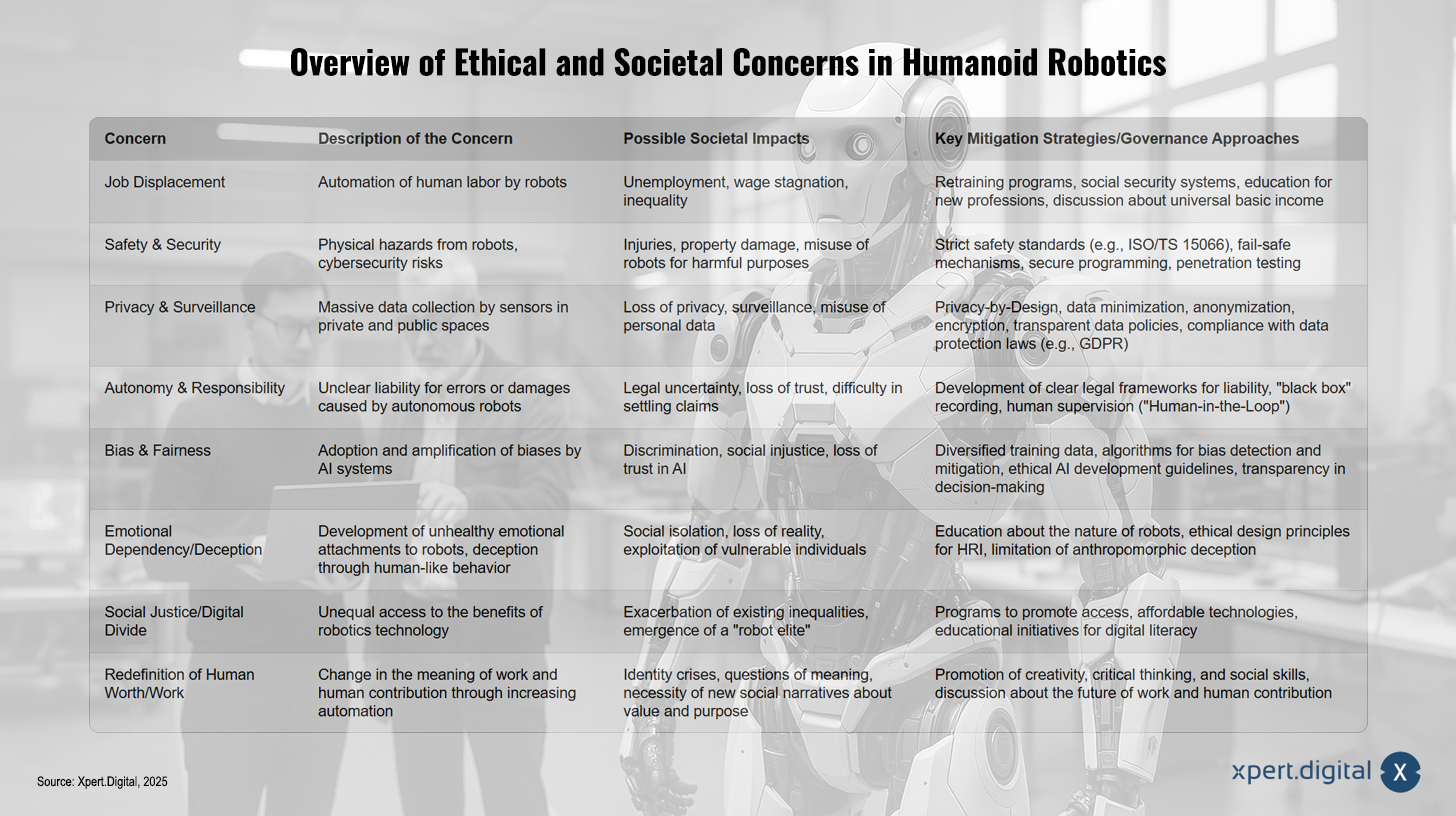
Преглед на етичните и обществените проблеми в хуманоидната роботика – Изображение: Xpert.Digital
Етичните и обществени проблеми, свързани с хуманоидната роботика, могат да бъдат разделени на няколко категории. Ключов аспект е потенциалното замяна на работни места, което може да е резултат от автоматизацията на човешкия труд от роботи. Това може да доведе до безработица, стагнация на заплатите и нарастващо неравенство. Предложените контрамерки включват програми за преквалификация, мрежи за социална сигурност, образователни инициативи за нови професии и дискусии за универсален базов доход. Друг проблем е безопасността и сигурността, тъй като роботите могат да представляват физически опасности или да бъдат използвани неправилно чрез рискове за киберсигурността. За да се предотвратят наранявания, имуществени щети или вредна употреба, са необходими строги стандарти за безопасност, механизми за отказоустойчивост, сигурно програмиране и цялостно тестване за проникване.
Въпросите за поверителността и наблюдението придобиват все по-голямо значение поради масивното събиране на данни от роботизирани сензори, тъй като това води до загуба на поверителност и риск от злоупотреба с лични данни. Защитните мерки включват поверителност още при проектиране, минимизиране на данните, анонимизиране, криптиране, прозрачни политики за данните и спазване на законите за защита на данните, като например GDPR. Автономността и отговорността на автономните роботи повдигат въпроси относно отговорността в случай на грешки или щети, което може да доведе до правна несигурност, загуба на доверие и трудности при уреждането на искове. Ясните правни рамки, записите от „черна кутия“ и човешкият надзор – известен още като „човек в цикъла“ – са от съществено значение.
Освен това съществуват опасения относно пристрастията и справедливостта, тъй като системите с изкуствен интелект могат да възприемат и засилват предразсъдъците, което потенциално води до дискриминация и социална несправедливост. Стратегиите за справяне с тези проблеми включват диверсифицирани данни за обучение, специализирани алгоритми за откриване и смекчаване на пристрастията, етични насоки за разработване на изкуствен интелект и прозрачност при вземането на решения. Емоционалната зависимост или измама от страна на роботите също представлява проблем, особено ако те подвеждат хората чрез човекоподобно поведение и насърчават емоционална привързаност. Повишаването на осведомеността относно истинската природа на роботите, установяването на етични принципи на проектиране във взаимодействието човек-робот (HRI) и ограничаването на антропоморфните стратегии за измама са от решаващо значение в този контекст.
Допълнителни обществени последици се отнасят до социалната справедливост и цифровото разделение, тъй като неравностойният достъп до технологии, базирани на роботика, би могъл да изостри съществуващите неравенства и да създаде „роботен елит“. Образователните инициативи, насърчаващи дигиталната грамотност, програмите за насърчаване на достъпа и достъпните технологии са подходящи контрамерки. И накрая, развитието на автоматизацията е поставено в контекста на предефинирането на човешката ценност и работа. Това би могло да предизвика кризи на идентичността и въпроси за смисъла, като същевременно стават необходими нови обществени наративи за стойността и целта на човешката дейност. Насърчаването на креативността, критичното мислене и социалните умения, както и насърчаването на открита дискусия за бъдещето на работата, са важни подходи за справяне с тези предизвикателства.
Обществено въздействие
- Бъдещето на труда: Интеграцията на хуманоидни роботи ще доведе до трансформация на работните роли, ще създаде нови професии (напр. поддръжка на роботи, програмиране на изкуствен интелект, служители по етика) и ще подчертае необходимостта от учене през целия живот. В същото време тя предлага потенциал за значително повишаване на производителността и икономически растеж.
- Социална справедливост и достъпност: Съществува риск от изостряне на цифровото разделение, ако достъпът до полезни роботизирани технологии е неравномерно разпределен. В същото време роботите предлагат потенциал за подобряване на достъпността за хора с увреждания. Възниква потенциален парадокс: Докато хуманоидите се разработват, за да облекчат недостига на работна ръка и да поемат нежелани задачи, широкото им приемане може да създаде нови форми на социална стратификация, основани на достъпа до тези технологии и контрола върху тях. Това би могло да задълбочи цифровото разделение, ако не се управлява справедливо. Хуманоидите обещават да запълнят празнините в работната сила, но тяхното разработване и внедряване изискват значителен капитал и експертиза. Ако достъпът до тези инструменти за повишаване на производителността остане ограничен до богати държави или големи корпорации, това би могло да изостри икономическите неравенства в световен мащаб и в рамките на обществата. Преодоляването на цифровото разделение става още по-важно в ерата на напредналата роботика.
- Обществено възприятие и доверие: Изграждането на обществено доверие е от решаващо значение за приемането. Прозрачността при използването на данни, ясната комуникация и справянето с опасенията за сигурност и поверителност са от съществено значение за това. Културните различия в очакванията за HRI и приемането на роботи също играят роля.
- Предефиниране на човешката ценност и предназначение: Тъй като роботите поемат все повече задачи, обществените дискусии за стойността на човешкия труд, креативност и социални взаимоотношения ще се засилят.
Управление и регулиране
Необходими са стабилни правни и етични рамки, които да ръководят разработването и внедряването на хуманоидни роботи. Съществуващите международни стандарти за безопасност (напр. ISO/TS 15066 за колаборативни роботи) трябва да бъдат доразвити за усъвършенстваните хуманоиди. Принципи като прозрачност, справедливост, отчетност, човешки надзор и принципът за ненанасяне на вреда са от решаващо значение. Принципите за защита на личните данни още при проектирането и разпоредбите за защита на данните (напр. GDPR) са от значение. Създаването на глобално хармонизирани разпоредби е предизвикателство поради различните културни ценности и приоритети. Законът на ЕС за изкуствения интелект служи като пример за регулиране, основано на риска.
От фабричния цех до хола: Хуманоидите в променящите се области на приложение – Пътна карта (2025-2035 г. и след това)
Следващите години и десетилетия обещават непрекъснато и ускорено развитие на хуманоидната роботика, водено от технологични пробиви и нарастващо пазарно приемане. Пътната карта към широкото приемане обаче не е линейна, а вероятно ще включва цикли на свръхексплоатация, разочарование и евентуална производителност (аналогично на цикъла на свръхексплоатация на Gartner). Различните приложения ще се развиват с различна скорост. Ранните успехи в структурирани индустриални среди ще бъдат от решаващо значение за осигуряване на финансиране и устойчиви научноизследователска и развойна дейност за по-сложни, неструктурирани приложения. Gartner понастоящем поставя хуманоидите на „Иновационния спусък“, а Forrester отбелязва бързото им нарастване на значението. Историческото приемане на технологиите често следва такива цикли. Първоначалните индустриални внедрявания (автомобилна промишленост, логистика) ще осигурят решаващо валидиране и приходи. Ако тези ранни приложения отговарят на очакванията за възвръщаемост на инвестициите, това ще доведе до допълнителни инвестиции, необходими за справяне с по-предизвикателните битови или силно интерактивни среди, които са в по-късна времева рамка.
Технологии от следващо поколение
- Сензори: Очаква се непрекъснат напредък в областта на визуалните системи (по-висока резолюция, по-добра обработка с изкуствен интелект), тактилните сензори (по-голяма чувствителност, издръжливост, икономическа ефективност) и проприоцепцията. Мултимодалното сливане на сензори ще играе ключова роля.
- Задвижващи механизми: Разработват се по-енергийно ефективни, компактни и бързо реагиращи електрически задвижващи механизми. Потенциалните пробиви в задвижващите механизми на меката роботика биха могли да доведат до по-съвместими и по-безопасни HRI.
- Материали: Разработват се по-леки, по-здрави и по-издръжливи материали. На фокус са и самовъзстановяващите се материали и материалите с вградени сензорни функции.
- Енергийни системи: Батериите с по-висока енергийна плътност (напр. твърдотелни батерии), по-бързото време за зареждане и подобрените системи за управление на батериите (BMS) са от решаващо значение за по-дълго време на работа и повишена безопасност.
- Изкуствен интелект и общ интелект: Напредъкът в областта на изкуствения общ интелект (ОИИ) ще позволи на роботите да учат по-сложни задачи с по-малко данни, да мислят абстрактно, да разбират контекстите задълбочено и да демонстрират здрав разум. Виртуалните учебни зони (ВУЗ) и мултимодалните модели ще станат по-усъвършенствани. Дългосрочната визия за ОИИ при хуманоидите ще изисква фундаментално преосмисляне на взаимоотношенията между човек и ИИ и потенциално ще доведе до нови форми на сътрудничество, взаимна зависимост и дори обществени структури, които са трудни за предвиждане от днешна гледна точка. ОИИ предполага роботи с човешки умения за учене и разсъждение. Когато хуманоидите постигнат това, те ще станат нещо повече от инструменти; те ще станат партньори или дори автономни агенти. Това повдига дълбоки въпроси относно тяхната роля в обществото, техните правомощия за вземане на решения и естеството на „работата“ и „интелигентността“. Необходимите обществени корекции биха били далеч по-обширни от тези за настоящите тесни приложения на ИИ.
Прогнозирани етапи и срокове за внедряването
- Краткосрочен план (2025-2027 г.):
- Пилотните проекти се увеличават в автомобилната и логистичната индустрия. Tesla и BYD планират да внедрят хиляди бройки през 2025-2026 г.
- Първо търговско пускане на пазара за специфични, ясно дефинирани задачи в тези сектори.
- Фокус върху подобряване на надеждността, намаляване на разходите и демонстриране на ясна възвръщаемост на инвестициите в индустриална среда.
- Очаква се използването на хуманоиди в логистиката да набере скорост през 2026-2027 г.
- Средносрочен план (2028-2033 г.):
- Разширяване към по-сложни задачи в индустриална среда.
- По-широко приемане в други търговски среди за услуги (търговия на дребно, хотелиерство и ресторантьорство) и специализирани роли в здравеопазването.
- Усъвършенстване на RaaS моделите, което увеличава достъпността.
- Значителни подобрения в сръчността, живота на батерията и възможностите на изкуствения интелект.
- Потенциал за ограничена, контролирана употреба в дома/лична помощ за специфични задачи.
- Дългосрочен план (2034-2040+):
- Широко разпространено приложение в множество индустрии и потенциално в частни домакинства за задачи от общ характер.
- Хуманоидни роботи, способни да вземат по-автономни решения и да работят в силно неструктурирана среда.
- По-тясна интеграция в човешкото общество, потенциално водеща до значителни трансформации на пазара на труда и предефиниране на работата.
- Морган Стенли прогнозира 8 милиона работещи хуманоиди в САЩ до 2040 г. и 63 милиона до 2050 г.
Трансформационен потенциал и дългосрочна визия
Хуманоидните роботи се разглеждат като инструменти с общо предназначение, които могат да увеличат човешките възможности в почти всеки сектор. Те имат потенциала да се справят с големи обществени предизвикателства, като недостиг на работна ръка, застаряващо население и опасна работа, както и да подобрят качеството на живот. Мнозина виждат „момента на iPhone“ за роботиката като настъпил, водещ до масово приемане и нова ера на сътрудничество човек-машина. Икономическият потенциал е огромен, с перспективата за повишена производителност и растеж на БВП. Дългосрочната визия включва роботи, които са безпроблемно интегрирани в ежедневието, изпълняват широк спектър от задачи и взаимодействат естествено с хората. Разработването на „хуманоиди с общо предназначение“ е стремеж към „универсален физически интерфейс“. Ако бъде постигнато, това би могло да комерсиализира много форми на физически труд и специализиран роботен хардуер, подобно на това, както компютрите с общо предназначение са комерсиализирали специализирани изчислителни машини. Целта е робот, способен да изпълнява много задачи. Ако една хуманоидна платформа, чрез усъвършенстван изкуствен интелект и адаптивен хардуер, може да изпълнява задачи, които понастоящем изискват множество специализирани роботи или човешки работници, това представлява промяна в парадигмата. Тази „универсалност“ би могла да доведе до икономии от мащаба в производството и значително да намали нуждата от различни видове специализирано оборудване за автоматизация, като по този начин фундаментално трансформира пазара на роботика и икономиката на труда.
Свързано с това:

От научна фантастика към реалност: Започва ерата на хуманоидните роботи
Хуманоидната роботика е в ключов момент от своето развитие. Подхранвана от значителния напредък в изкуствения интелект, подобрените хардуерни компоненти и нарастващото пазарно търсене, тези хуманоидни машини се развиват от обикновени изследователски обекти до осезаеми решения за реални проблеми в индустрията, здравеопазването и не само. Визията за роботи, безпроблемно сътрудничещи си с хората и изпълняващи задачи в проектирани от човека среди, се приближава до реалността.
Анализът показа, че технологичните основи, особено в областите на изпълнителните механизми, сензорите, захранването и управлението, базирано на изкуствен интелект, се развиват бързо. В същото време сложността на възпроизвеждането на човешката сръчност и интелигентност, високите разходи, мащабируемостта на производството и осигуряването на безопасност и надеждност продължават да представляват значителни предизвикателства. Пазарът показва огромен потенциал за растеж, както се вижда от множество прогнози, но скоростта на широкото търговско приемане ще зависи от това колко ефективно ще бъдат преодолени тези препятствия.
Етичните и обществените последици са дълбоки и изискват проактивно ангажиране. Трябва да се обърне внимание на въпросите, свързани със съкращенията на работни места, защитата на данните, отговорността и безопасността, както и на по-фините аспекти на взаимодействието човек-робот и общественото приемане. Отговорните иновации, основани на широко сътрудничество между индустрията, академичните среди, правителството и обществеността, заедно с далновидно управление, са от съществено значение, за да се гарантира, че разработването и внедряването на хуманоидни роботи служат на общото благо.
В обобщение, хуманоидните роботи имат потенциала да трансформират дълбоко работата, обществото и ежедневието през следващите десетилетия. Макар пътят от научната фантастика към ежедневната реалност все още да е изпълнен с предизвикателства, инерцията на прогреса е неоспорима. Успешното интегриране на тези технологии ще изисква баланс между технологичната амбиция, икономическата жизнеспособност и етичната отговорност. Следващите години ще бъдат от решаващо значение за определянето дали и как този трансформационен потенциал може да бъде реализиран напълно, като преходът от специализирани приложения към по-общи възможности представлява ключов етап.
Тук сме за Вас - Консултации - Планиране - Внедряване - Управление на проекти
☑️ Подкрепа за МСП в стратегията, консултирането, планирането и внедряването
☑️ Създаване или пренасочване на дигиталната стратегия и дигитализация
☑️ Разширяване и оптимизиране на международните процеси на продажби
☑️ Глобални и дигитални B2B търговски платформи
☑️ Pioneer Business Development

Konrad Wolfenstein
С удоволствие бих служел като ваш личен съветник.
Можете да се свържете с мен, като попълните формата за контакт по-долу или просто ми се обадите на +49 89 89 674 804 (Мюнхен) .
Очаквам с нетърпение нашия съвместен проект.
Пиши ми

Xpert.Digital - Konrad Wolfenstein
Xpert.Digital е индустриален център, фокусиран върху дигитализацията, машиностроенето, логистиката/интралогистиката и фотоволтаиката.
С нашето 360° решение за бизнес развитие, ние подкрепяме известни компании от нов бизнес до следпродажбено обслужване.
Пазарно разузнаване, маркетинг, маркетингова автоматизация, разработване на съдържание, PR, имейл кампании, персонализирани социални медии и подхранване на лийдове са част от нашите дигитални инструменти.
Можете да намерите повече информация на: www.xpert.digital - www.xpert.solar - www.xpert.plus
Поддържайте връзка




















